1.本技术涉及宠物医疗器械领域,尤其涉及一种胃部异物取出系统。
背景技术:
2.宠物贪玩的性格导致宠物经常误食一些异物,这些异物在宠物体内难以消化,一方面可以划伤宠物的胃部,另一方面也可能导致胃部坠胀,损伤消化系统。
3.通过开刀手术取出异物的过程可能存在较大的风险,而且恢复期较长,活泼好动的宠物在恢复期经常使得伤口重复裂开。
4.通过食道取出异物的过程往往也存在风险,由于对异物的认知不足,经常出现异物划伤食道或胃部的情况。
技术实现要素:
5.本技术提供了一种胃部异物取出系统,便于将异物从宠物胃部安全取出。
6.本技术实施例提供一种胃部异物取出系统包括内窥镜和异物夹取工具。内窥镜包括腔管和图像传感器,所述腔管用于伸入宠物胃部,所述腔管具有贯通的第一通道,所述图像传感器能够通过所述第一通道从所述腔管伸入宠物胃部的端部伸出。异物夹取工具包括延伸管和抓取件,所述延伸管能够伸入所述第一通道,所述延伸管的一端设置有第一连接件,所述抓取件包括电磁铁、夹爪和抓取气囊,所述电磁铁、所述夹爪和所述抓取气囊的一端均设置有第二连接件,所述第一连接件与所述第二连接件可拆卸配合。控制部,包括第一处理器、存储器和显示模块。所述存储器存储有各种异物的图形模板。所述第一处理器与所述图像传感器电性连接,用于接收所述图像传感器得到的图形信号,并比对所述图形信号和所述图形模板,以判断所述异物类型。所述显示模块与所述第一处理器电性连接,用于显示所述图形信号。
7.该胃部异物取出系统通过图像传感器得到宠物胃部的图形信号,处理器处理图形信号并与图形模板进行比较,从而判断宠物胃部的异物属于何种异物。当然,经验丰富的操作者也可以通过显示模块根据经验一起判断,通过结合处理器的判断和操作者的经验判断则可以提高对异物判断的准确率。在判断异物的类型后,根据异物的类型选择对应的工具进行异物的取出。如判断异物的类型为钢铁异物,则可以将延伸管取出,在延伸管的端头设置电磁铁,通过电磁铁吸附钢铁异物的形式将异物从胃部取出。如判断异物的类型为非钢铁小型物件,则可以在延伸管的端头设置夹爪,通过夹爪夹取异物的形式将异物从胃部取出。如判断异物的类型为较大的废钢铁异物,但该异物能够通过食道时,则可以在延伸管的端头设置抓取气囊,抓取气囊进入胃部后充气扩张,使得抓取气囊包裹异物,然后负压使得抓取气囊收缩抓取异物,通过抓取气囊抓取异物的形式将异物从胃部取出。在主人能够初步判断异物类型时,可以在第一次使用图像传感器进行胃部检测的时候预装与初步判断异物类型对应的异物夹取工具。
8.一种可能的实现方式中,所述第一连接件包括第一螺纹,所述第二连接件包括第
二螺纹,所述第一螺纹能够与所述第二螺纹螺纹配合。
9.在该可能的实现方式中,螺纹配合使得异物夹取工具能够与延伸管良好固定,延伸管在腔管内滑动时,异物夹取工具不易脱落。
10.一种可能的实现方式中,所述延伸管内具有贯通的第二通道,所述图像传感器能够穿过所述第二通道。
11.在该可能的实现方式中,在使用异物夹取工具进行异物夹取时,也可以同时将图像传感器伸入胃部进行胃部图形的观测,便于操作异物夹取工具。
12.一种可能的实现方式中,所述延伸管与所述电磁铁连接时,所述第二通道内设置有柔性电线。所述延伸管与所述夹爪连接时,所述第二通道内设置有牵引线。所述延伸管与所述抓取气囊连接时,所述第二通道内设置有气管。
13.在该可能的实现方式中,第二通道可以根据使用的异物夹取工具起到不同作用,应对电能驱动的夹爪和电磁铁,第二通道用于放置柔性电线,应对气动的抓取气囊,第二通道内设置气管为气囊供应气体。
14.一种可能的实现方式中,所述异物夹取工具还包括超声波发生头,所述超声波发生头的一端设置有所述第二连接件。所述超声波发生头用于发出超声波以破碎宠物胃部的异物。
15.在该可能的实现方式中,通过超声波发生头发生的超声波破碎硅酸盐形式的异物。在宠物误吞难以消化的石头时,比如异物为具有难溶外层的鹅卵石时,则可以通过超声波发生头使得鹅卵石破碎后再取出,或者破碎后使得难溶外层消失,等待宠物自行消化或直接排出即可。
16.一种可能的实现方式中,胃部异物取出系统还包括监测装置,所述监测装置包括第二处理器和体征检测仪。所述第二处理器与所述体征检测仪电性连接。所述体征检测仪包括心电监测头和血压监测器,所述心电监测头用于监测宠物的心脏跳动情况,所述血压监测器用于监测宠物的血压状况。
17.在该可能的实现方式中,可以通过监测装置实时监测宠物的身体状态,避免错误操作使得宠物出现身体异常而操作人员无法得知的情况。提高对宠物胃部异物取出过程的安全性。
18.一种可能的实现方式中,所述抓取气囊为环状气囊,在所述环状气囊中间形成用于抓取物件的抓取腔,所述环状气囊的端部设置有弹性变形环。
19.在该可能的实现方式中,环状气囊能够完全包裹异物。如果异物无法进入第一通道,则通过同时抽离腔管的形式将异物取出,此时,在取出异物的过程中,气囊可以钝化异物的锐角,避免异物划伤宠物的食道。
20.一种可能的实现方式中,所述环状气囊具有朝向所述抓取腔的抓取侧和远离所述抓取腔的滑行侧。所述抓取侧设置有防滑绒毛,所述滑行侧涂抹有润滑液。
21.在该可能的实现方式中,通过防滑绒毛提升抓取气囊对异物抓取的稳定性,通过润滑液可以进一步避免异物取出过程中划伤食道。
22.一种可能的实现方式中,还包括云端通讯模块,所述云端通讯模块与所述控制部电性连接,所述云端通讯模块用于与云端模块通讯连接,所述云端模块能够存储所述图形信号以生成新的所述图形模板。
23.在该可能的实现方式中,该云端通讯模块能够与云端模块进行数据传输。云端模块能够将各个宠物医院的胃部异物取出系统的控制部联合起来,使得各个宠物医院能够共享案例,将诊断得到的图形信号分享,以便其他宠物医院在以后的诊断过程中能够得到更加精准图形模板进行比较。
24.一种可能的实现方式中,所述控制部还包括数据输入模块,所述数据输入模块用于输入宠物吞食异物的过程信息。所述云端模块还能够存储所述过程信息。
25.在该可能的实现方式中,该控制部还能输入过程信息,也即可以输入文字信息。宠物主人可以将该异物被宠物吞食的过程陈述,并通过数据输入模块输入控制部,控制部再上传至云端模块。当其他宠物医院检测到相应的异物,而宠物主人无法得知该异物如何被宠物吞食时,可以调取云端模块的相关记录作为参考,避免宠物再次吞食相应的异物。
附图说明
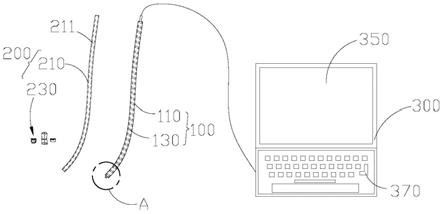
26.图1是本技术一实施例提供的一种胃部异物取出系统的结构示意图。
27.图2是图1中a区域的放大图。
28.图3是本技术一实施例提供的一种抓取件的结构示意图。
29.图4是本技术一实施例提供的一种超声波发生头的结构示意图。
30.图5是本技术一实施例提供的控制部、监测装置和云端通讯模块连接的系统示意图。
31.主要元件符号说明
32.内窥镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
33.腔管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110
34.第一通道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111
35.图像传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130
36.变形杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131
37.摄像头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
133
38.异物夹取工具
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
39.延伸管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210
40.第二通道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211
41.抓取件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230
42.第二螺纹
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230a
43.电磁铁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
231
44.夹爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
233
45.抓取气囊
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
235
46.抓取腔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2351
47.弹性件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2353
48.超声波发生头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
270
49.控制部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300
50.第一处理器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310
51.存储器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
330
52.显示模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
350
53.数据输入模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
370
54.监测装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400
55.第二处理器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
410
56.体征监测器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
430
57.心电监测头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
431
58.血压监测器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
433
59.云端通讯模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
500
60.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
61.以下由特定的具体实施例说明本技术的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本技术的其他优点及功效。虽然本技术的描述将结合较佳实施例一起介绍,但这并不代表此申请的特征仅限于该实施方式。恰恰相反,结合实施方式作申请介绍的目的是为了覆盖基于本技术的权利要求而有可能延伸出的其它选择或改造。为了提供对本技术的深度了解,以下描述中将包含许多具体的细节。本技术也可以不使用这些细节实施。此外,为了避免混乱或模糊本技术的重点,有些具体细节将在描述中被省略。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
62.以下,如果有用到,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。“上”、“下”、“左”、“右”等方位术语是相对于附图中的部件示意置放的方位来定义的,应当理解到,这些方向性术语是相对的概念,它们用于相对于的描述和澄清,其可以根据附图中部件所放置的方位的变化而相应地发生变化。
63.在本技术中,如果有用到,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
64.在下述实施例结合示意图进行详细描述时,为便于说明,表示器件局部结构的图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本技术保护的范围。
65.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术的实施方式作进一步地详细描述。
66.图1示出了本技术一种实施方式中的胃部异物取出系统的结构示意图。图2示出了图1中a区域的放大图。
67.请结合参阅图1和图2,该本技术实施例提供一种胃部异物取出系统,包括内窥镜100、异物夹取工具200和控制部300。
68.内窥镜100包括腔管110和图像传感器130。腔管110具有贯通的第一通道111,腔管110能够进行变形,腔管110伸入宠物食道后,能够根据自身变形来匹配食道的弯曲。图像传
感器130包括变形杆131和摄像头133,摄像头133固定在变形杆131的一端,摄像头133伸入第一通道111后,通过抽拉变形杆131使得摄像头133在第一通道111内活动,并可以使得摄像头133从第一通道111的端部伸出。摄像头133能够获取图形信息。
69.图3示出了本技术一种实施方式中的抓取件230的结构示意图。
70.请结合参阅图1和图3,异物夹取工具200包括延伸管210和抓取件230,抓取件230可拆卸地设置在延伸管210的一端。延伸管210本身能够进行变形,抓取件230设置在延伸管210的一端时。抓取件230可以伸入第一通道111,通过抽拉延伸管210使得抓取件230在第一通道111内活动,并可以使得抓取件230从第一通道111的端部伸出。应对宠物胃部不同的异物,可以采用不同类型的抓取件230。抓取件230包括电磁铁231、夹爪233和抓取气囊235。当宠物胃部的异物为钢铁材质的异物时,可以在延伸管210的端部设置电磁铁231,电磁铁231吸附异物后,延伸管210带动电磁铁231将异物取出。当宠物胃部的异物为非钢铁材质的异物时,比如为塑料袋时,可以在延伸管210的端部设置夹爪233,夹爪233夹住塑料袋的一部分,延伸管210带动夹爪233移动时,通过塑料袋自身变形逐渐将塑料袋全部拖拽入第一通道111,随着延伸管210抽出,塑料袋通过第一通道111取出。当宠物胃部的异物为钢铁材质的异物,而且是体积相对较大的硬质物件时,可以在延伸管210的端部设置抓取气囊235,抓取气囊235伸入胃部后充气并移动靠近异物,包裹异物后再通过负压收缩将异物与抓取气囊235固定,随后拉动延伸管210使得异物随同抓取气囊235一起经过第一通道111抽出。当异物难以进入第一通道111时,还可以通过同时抽出腔管110和延伸管210的形式,抓取气囊235带动异物经过食道取出。
71.可选择性的,抓取件230与延伸管210的可拆卸连接形式为螺纹连接。延伸管210的端部设置第一连接件,第一连接件为第一螺纹。在抓取件230的端部设置第二连接件,第二连接件为第二螺纹230a,第一螺纹与第二螺纹230a螺纹配合,即可实现抓取件230与延伸管210的可拆卸连接。螺纹连接的形式下,抓取件230和延伸管210具有较强的轴向限位配合强度,在延伸管210拖动抓取件230移动时,可以避免抓取件230从延伸管210的端部脱落。可以理解的,第一连接件还可以为卡槽,第二连接件还可以为卡扣,通过卡扣和卡槽的卡接,使得抓取件230和延伸管210连接。
72.为了便于抓取件230抓取异物的过程中,也能够通过图像传感器130进行胃部情况的观测。延伸管210内设置贯通的第二通道211,图像传感器130能够穿过第二通道211。与之对应的,抓取件230设置有用于图像传感器130感应图形的缝隙。当电磁铁231作为抓取件230时,电磁铁231为环形结构,在中间具有穿孔,穿孔进行采光使得图像传感器130能够观测到胃部的情况。当夹爪233作为抓取件230时,夹爪233包括多个可相对活动的爪,爪的端部具有缺口,使得夹爪233在加持状态时端部也具有缝隙,该缝隙能够透光,使得图像传感器130能够观测到胃部的情况。当抓取气囊235作为抓取件230时,抓取气囊235采用透明材料制成,且抓取气囊235在非充气状态下体积较小,抓取气囊235还可以设置为环状结构,图像传感器130可以从抓取气囊235的中部穿出。
73.第二通道211除了用作牵引图像传感器130的通道外,还可以用来连接线路。当抓取件230为电磁铁231时,第二通道211内可以设置柔性电线为电磁铁231提供电能。当抓取件230设置为夹爪233时,第二通道211内可以设置柔性电线为夹爪233提供电能,通过电机的形式控制夹爪233的运动。当然电机本身体积较大,也可以通过牵引线的形式带动夹爪
233联动运动,牵引线通过第二通道211引出。当抓取件230为抓取气囊235时,第二通道211内可以设置气管,气管为环形,在气管外壁和第二通道211内壁之间通气为抓取气囊235提供气体,气管的内部可以供图像传感器130运动,也可以通过气管和图像传感器130并列的形式设置在第二通道211内。或者整个抓取气囊235穿过第二通道211,在第二通道211外控制气囊的气体进出。
74.抓取气囊235为环状气囊,在抓取气囊235的中间形成抓取腔2351,根据抓取气囊235的变形,抓取腔2351也会对应变形。抓取气囊235的端部设置有弹性件2353,在抓取气囊235需要抓取异物时,通过适当充气使得抓取气囊235具有一定刚性,撑开弹性件2353,并让抓取腔2351对准异物,异物进入抓取腔2351后,则通过负压使得气囊收缩,弹性件2353也对应收缩。抓取气囊235包裹异物,弹性件2353封闭抓取腔2351的端口。拖动抓取气囊235即可对应移动异物。
75.抓取气囊235靠近抓取腔2351的一侧形成抓取侧,为了提高抓取气囊235对异物的抓取稳定型,抓取侧设置有防滑绒毛,在异物进入抓取腔2351后,不易从抓取腔2351脱出。抓取气囊235远离抓取腔2351的一侧为滑行侧,为了便于抓取气囊235在第二通道211或食道内滑动,在滑行侧涂抹有润滑液。
76.图4示出了本技术一种实施方式中的超声波发生头270的结构示意图。
77.请参阅图4,宠物也会误食一些不易消化的大块异物,比如鹅卵石。由于食道具有弹性,这些大块异物可以通过扩张食道进入宠物的胃部。但是在取出这些大块异物时难以进行夹取,此时可以通过破碎大块异物的形式,使得大块异物变成易于夹取的小块异物,或者直接让小块异物停留于胃部等待被消化或被直接排出。为了便于破碎大块异物,异物夹取工具200还包括超声波发生头270,超声波发生头270的一端设置有第二连接件,第二连接件为第二螺纹230a。通过第一螺纹和第二螺纹230a的螺纹配合,使得超声波发生头270连接在延伸管210的一端。通过延伸管210将超声波发生头270移动至宠物的胃部,超声波发生头270对准大块异物发出超声波,超声波使得硬质的大块异物破碎形成小块异物。
78.图5示出了本技术一种实施方式中的控制部300、监测装置400和云端通讯模块500连接的系统示意图。
79.请参阅图5,控制部300包括第一处理器310、存储器330和显示模块350。第一处理器310与图像传感器130电性连接,显示模块350与第一处理器310电性连接。图像传感器130得到的图形信息能够通过第一处理器310处理后在显示模块350进行显示。操作者可以通过显示模块350观察胃部的状况,从而判断异物的位置,也可以通过经验判断异物的类型。存储器330与第一处理器310电性连接,存储器330内存储有图形模板,第一处理器310可以调取存储器330内的图形模板,比较图像传感器130得到的图形信号与存储器330内的各种图形模板,判断异物的类型。可以结合操作者的经验判断和第一处理器310的智能判断综合得到结果,使得异物的类型判断更加准确。在判断异物的类型后,再选择对应的抓取件230进行异物抓取,可以提高异物取出的成功率,也可以尽量降低对宠物的伤害。在判断异物为大块异物且能够破碎时,可以通过超声波发生头270对大块异物进行破碎。
80.胃部异物取出系统还包括监测装置400。监测装置400用于胃部异物取出时,监测宠物的身体状况。由于宠物在胃部异物取出的过程中处于麻醉状态,无法感受到身体的异常,也不能表达身体的异常,通过监测装置400进行实时监测,有助于操作者及时得知宠物
的异常并进行处理。监测装置400包括第二处理器410和体征检测仪。第二处理器410与体征检测仪电性连接。体征检测仪包括心电监测头431和血压监测器433,心电监测头431用于监测宠物的心脏跳动情况,血压监测器433用于监测宠物的血压状况。当血压降低时,则可能食道可能出现破损或胃部破损,此时可以及时放弃异物取出,准备进行手术。当心脏跳动明显加速或者心率较低时,则可能是麻醉出现一定问题,需要考虑补充麻醉、补充生理盐水或注射麻醉药的拮抗剂。
81.胃部异物取出系统还包括云端通讯模块500,云端通讯模块500与控制部300电性连接。云端通讯模块500能够与云端模块通讯连接,通过云端通讯模块500与云端模块的数据传输,能够将控制部300得到的数据与云端模块进行数据交换。云端模块通过远端的服务器提供。控制部300通过因特网与服务器通讯连接,控制部300能够将图像传感器130得到的图形信息传输至云端模块。云端模块储存图形信息形成新的图形模板,该图形模板对应控制部300判断得到的异物类型。该云端模块能够将各个宠物医院的胃部异物取出系统的控制部300联合起来,使得各个宠物医院能够共享案例,将诊断得到的图形信号分享,以便其他宠物医院在以后的诊断过程中能够得到更加精准图形模板进行比较。而且在云端模块还可以进行神经模型算法,将各种图形模板与异物类型进行匹配,当控制部300的第一处理器310难以计算判断异物类型时,则可以将图形信息上传至云端模块,通过云端模块进行数据库搜索判断异物类型,再将判断得到的异物类型传输至控制部300。
82.可选择性的,控制部300还包括数据输入模块370,数据输入模块370使得操作者能够手动输入文字信息,文字信息可以为操作者输入的宠物吞食异物的过程信息。控制部300将宠物吞食异物的过程信息上传至云端模块,云端模块储存该过程信息。
83.宠物主人可以将该异物被宠物吞食的过程陈述,并通过数据输入模块370输入控制部300,控制部300再上传至云端模块。当其他宠物医院检测到相应的异物,而宠物主人无法得知该异物如何被宠物吞食时,可以调取云端模块的相关记录作为参考,避免宠物再次吞食相应的异物。
84.比如异物为一圆柱形小铁块,宠物主人观察到了猫吞食异物的全程,该过程信息为猫击打闹钟,使得闹钟的撞铃掉落,随后猫吞食该撞铃。云端模块记载该过程信息后,可以提醒后来检测到异物同为圆柱形小铁块的病例猫的主人,注意检查家中的闹钟,并提醒其以后将闹钟放到猫难以够到的地方。
85.本技术提供的这种胃部异物取出系统能够通过控制部300判断宠物胃部的异物类型,并根据异物类型选择合适的抓取件230,通过抓取件230以尽量不伤害宠物的形式将异物取出。而且通过控制部300和操作者共同判断异物类型,可以降低异物类型判断错误的几率,提高异物取出的几率。云端模块可以持续扩大图形模板的数据库,从而提高控制部300判断的成功率。云端模块和控制部300均可以加载神经网络学习模型,逐步提高异物类型判断的正确率。
86.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何在本技术揭露的技术范围内的变化或替换,都应涵盖在本技术的公开范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。