用于平衡变焦镜头重心的系统
1.版权声明
2.本专利文件的公开内容的一部分包含受版权保护的材料。版权所有者不反对任何人按照其在专利和商标局的专利文件或记录中的形式对本专利文件或本专利公开内容进行复制,但在其他方面保留所有版权。
技术领域
3.本公开的实施例总体上涉及成像系统,并且更具体但非排他地,涉及用于平衡成像装置的支撑系统和方法。
背景技术:
4.空中成像近年来已得到普及。在典型的空中成像系统中,成像装置通过云台与飞行器连接。成像装置可包括用于捕获各种距离场景的图像的变焦镜头(或镜头单元)。
5.变焦镜头通常由多个镜头组组成。所述镜头组在变焦镜头推近(或拉远)物体时移动。镜头组之间的移动导致镜头组之间的相对位置变化,并且会引起镜头组的重心偏移,并且由此引起成像装置的重心偏移。由于重心偏离云台的支撑位置,所以成像装置的重心偏移可能成为云台的一个问题。成像装置的重心偏移可能导致云台不受控制的运动,例如使用期间云台的俯仰。
6.现有的用于平衡成像装置的重心的方法需要至少一个附加的平衡配重和至少一个用于操作所述平衡配重的专用电机。因此,现有的方法增加了云台的负担,给成像系统带来了额外的复杂性,并增加了功耗。
7.鉴于上述原因,需要一种改进的用于平衡成像装置的重心的支撑系统和方法。
技术实现要素:
8.根据本文公开的第一方面,提出了一种用于平衡成像装置的方法,包括:
9.确定成像装置的重心;和
10.基于确定的重心移动成像装置的支撑位置。
11.在本公开的方法的一个示例性实施例中,移动包括移动支撑位置以补偿重心的变化。
12.在本公开的方法的另一示例性实施例中,移动支撑位置包括对准支撑位置与重心。
13.在本公开的方法的另一示例性实施例中,确定重心包括从与成像装置相关联的数据源中检索重心数据。
14.在本公开的方法的另一示例性实施例中,检索重心数据包括从数据源的查询表中获取重心数据。
15.在本公开的方法的另一示例性实施例中,获取重心数据包括基于操作命令从查询表中检索重心数据。
16.在本公开的方法的另一示例性实施例中,检索重心数据包括基于焦距和焦点位置搜索查询表。
17.在本公开的方法的另一示例性实施例中,移动支撑位置包括根据检索到的重心数据改变支撑位置。
18.在本公开的方法的另一示例性实施例中,改变支撑位置包括沿成像装置的光轴移动支撑位置。
19.本公开的方法的示例性实施例还包括:确定成像装置施加的负荷是否在容许范围内。
20.在本公开的方法的另一示例性实施例中,确定所述成像装置施加的负荷是否在容许范围内包括:将所述成像装置施加的负荷与预定负荷阈值进行比较。
21.在本公开的方法的另一示例性实施例中,比较负荷包括用测量装置检测负荷。
22.在本公开的方法的另一示例性实施例中,比较负荷包括基于重心和成像装置的质量来确定负荷。
23.在本公开的方法的另一示例性实施例中,确定负荷包括根据成像装置的焦距和/或焦点位置计算负荷。
24.在本公开的方法的另一示例性实施例中,移动支撑位置包括:当负荷被确定为处于容许范围之外时,移动支撑位置。
25.本公开的方法的示例性实施例还包括确定支撑位置的可调节性。
26.在本公开的方法的另一示例性实施例中,确定可调节性包括:确定与成像装置相关联的支撑机构的限制。
27.本公开的方法的示例性实施例还包括确定支撑位置的期望可移动位置。
28.在本公开的方法的另一示例性实施例中,确定期望可移动位置包括:基于命令的姿态和/或预定的负荷阈值来获取期望可移动位置。
29.在本公开的方法的另一示例性实施例中,获取期望可移动位置包括:
30.当负荷大于预定负荷阈值时,将期望可移动位置等同于最大允许支撑位置;和
31.当负荷小于或等于预定负荷阈值时,将期望可移动位置等同于重心。
32.在本公开的方法的另一示例性实施例中,将期望可移动位置等同于最大允许位置包括:确定最大允许位置,在该最大允许位置处,成像装置的负荷等于预定负荷阈值。
33.在本公开的方法的另一示例性实施例中,移动支撑位置包括:当期望可移动位置不同于支撑位置的当前位置时将支撑位置移动到期望可移动位置,并且当期望可移动位置等于当前位置时维持支撑位置。
34.在本公开的方法的另一示例性实施例中,移动支撑位置包括:操作成像装置的支撑机构以改变支撑位置。
35.在本公开的方法的另一示例性实施例中,操作支撑机构包括:启用与成像装置相关联的云台。
36.根据本文公开的另一方面,提出了一种用于平衡成像装置的成像系统,包括:
37.一个或多个处理器,所述一个或多个处理器单独地或共同地操作以确定成像装置的重心;和
38.具有支撑位置的成像装置的支撑机构,所述支撑位置配置为基于确定的重心移
动。
39.在本公开的成像系统的一个示例性实施例中,支撑机构配置成移动支撑位置以补偿成像装置的重心变化。
40.在本公开的成像系统的另一示例性实施例中,支撑位置配置为对准支撑位置与重心。
41.本公开的成像系统的示例性实施例还包括与一个或多个处理器相关联的数据源,用于存储重心数据。
42.在本公开的成像系统的另一示例性实施例中,数据源包括用于由一个或多个处理器检索重心数据的查询表。
43.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为基于操作命令从查询表中检索重心数据。
44.在本公开的成像系统的另一示例性实施例中,操作命令包括焦距和焦点位置中的至少一个。
45.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为根据检索到的重心数据改变支撑位置。
46.在本公开的成像系统的另一示例性实施例中,支撑位置沿成像装置的光轴移动。
47.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为启用支撑机构以移动支撑位置。
48.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为确定成像装置施加的负荷是否在容许范围内。
49.在本公开的成像系统的另一示例性实施例中,容许范围由预定负荷阈值限定。
50.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为基于重心和成像装置的质量来确定负荷。
51.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为:根据成像装置的焦距和/或焦点位置来确定负荷。
52.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为:当负荷确定为处于容许范围之外时,移动支撑位置。
53.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为:确定支撑位置的可调节性。
54.在本公开的成像系统的另一示例性实施例中,根据支撑机构的限制确定可调节性。
55.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为:确定支撑位置的期望可移动位置。
56.在本公开的成像系统的另一示例性实施例中,基于命令的姿态和预定负荷阈值确定期望可移动位置。
57.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为:当负荷大于预定负荷阈值时将期望可移动位置等同于最大允许支撑位置,并且当负荷小于或等于预定负荷阈值时将期望可移动位置等同于重心。
58.在本公开的成像系统的另一示例性实施例中,最大允许位置是成像装置的负荷等
于预定负荷阈值的位置。
59.在本公开的成像系统的另一示例性实施例中,一个或多个处理器配置为:当期望可移动位置不同于支撑位置的当前位置时将支撑位置移动到期望可移动位置,并且当期望可移动位置等于当前位置时维持支撑位置。
60.在本公开的成像系统的另一示例性实施例中,支撑机构是与成像装置和飞行器相关联的云台,所述云台用于提供成像装置的支撑位置。
61.根据本文公开的另一方面,提出了一种用于控制成像装置的支撑位置的方法,包括:
62.移动支撑位置;和
63.通过所述移动来平衡成像装置的重心。
64.在本公开的方法的示例性实施例中,移动支撑位置包括:经由一个或多个控制器来控制支撑位置的移动。
65.在本公开的方法的另一示例性实施例中,移动支撑位置包括:基于控制来移动支撑位置以补偿重心的变化。
66.在本公开的方法的另一示例性实施例中,移动支撑位置包括确定成像装置的重心。
67.在本公开的方法的另一示例性实施例中,确定重心包括:从与一个或多个控制器相关联的数据源中检索重心数据。
68.在本公开的方法的另一示例性实施例中,检索重心数据包括:从数据源的查询表中获取重心数据。
69.在本公开的方法的另一示例性实施例中,获取重心数据包括:基于操作命令从查询表中检索重心数据。
70.在本公开的方法的另一示例性实施例中,检索重心数据包括:基于焦距和焦点位置搜索查询表。
71.在本公开的方法的另一示例性实施例中,移动支撑位置包括:根据检索到的重心数据改变支撑位置。
72.在本公开的方法的另一示例性实施例中,改变支撑位置包括:启用与成像装置相关联的支撑机构。
73.本公开的方法的示例性实施例还包括确定成像装置施加的负荷是否在容许范围内。
74.在本公开的方法的另一示例性实施例中,确定所述成像装置施加的负荷是否在容许范围内包括:将所述成像装置施加的负荷与预定负荷阈值进行比较。
75.在本公开的方法的另一示例性实施例中,比较负荷包括:根据成像装置的焦距和/或焦点位置确定负荷。
76.在本公开的方法的另一示例性实施例中,移动支撑位置包括:当负荷被确定为处于容许范围之外时移动支撑位置。
77.本公开的方法的示例性实施例还包括确定支撑位置的期望可移动位置。
78.在本公开的方法的另一示例性实施例中,确定期望可移动位置包括:基于命令的姿态和/或预定的负荷阈值来获取期望可移动位置。
79.在本公开的方法的另一示例性实施例中,获取期望可移动位置包括:
80.当负荷大于预定负荷阈值时,将期望可移动位置等同于最大允许支撑位置;和
81.当负荷小于或等于预定负荷阈值时,将期望可移动位置等同于重心。
82.在本公开的方法的另一示例性实施例中,将期望可移动位置等同于最大允许位置包括:确定最大允许位置,在该最大允许位置处,成像装置的负荷等于预定负荷阈值。
83.在本公开的方法的另一示例性实施例中,移动支撑位置包括:当期望可移动位置不同于支撑位置的当前位置时将支撑位置移动到期望可移动位置,并且当期望可移动位置与当前位置相同时维持支撑位置。
84.在本公开的方法的另一示例性实施例中,启用支撑机构包括:启用与云台相关联的装置。
85.根据本文公开的另一方面,提出了一种无人机(uav),包括:
86.机身;
87.成像装置;和
88.用于连接机身和具有支撑位置的成像装置的云台,所述支撑位置配置为移动以补偿成像装置的重心的变化。
89.本公开的无人机的示例性实施例还包括一个或多个处理器,所述一个或多个处理器单独或共同地操作以确定成像装置的重心。
90.在本公开的无人机的一个示例性实施例中,支撑位置配置为对准重心。
91.本公开的无人机的示例性实施例还包括与一个或多个处理器相关联的数据源,用于存储重心数据。
92.在本公开的无人机的另一示例性实施例中,数据源包括用于由一个或多个处理器检索存储的重心数据的查询表。
93.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:基于操作命令从查询表中检索重心数据。
94.在本公开的无人机的另一示例性实施例中,操作命令包括焦距和焦点位置中的至少一个。
95.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为根据检索到的重心数据改变支撑位置。
96.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:启用云台以使支撑位置沿成像装置的光轴移动。
97.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:确定成像装置施加的负荷是否在容许范围内。
98.在本公开的无人机的另一示例性实施例中,容许范围由预定负荷阈值限定。
99.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为基于重心和成像装置的质量来确定负荷。
100.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:根据成像装置的焦距和/或焦点位置确定负荷。
101.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:当负荷被确定为处于容许范围之外时移动支撑位置。
102.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:确定支撑位置的期望可移动位置。
103.在本公开的无人机的另一示例性实施例中,基于命令的姿态和预定负荷阈值来确定期望可移动位置。
104.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:当负荷大于预定负荷阈值时将期望可移动位置等同于最大允许支撑位置,并且当负荷小于或等于预定负荷阈值时将期望可移动位置等同于重心。
105.在本公开的无人机的另一示例性实施例中,最大允许位置是成像装置的负荷等于预定负荷阈值的位置。
106.在本公开的无人机的另一示例性实施例中,一个或多个处理器配置为:当期望可移动位置不同于支撑位置的当前位置时将支撑位置移动到期望可移动位置,并且当期望可移动位置与当前位置相同时维持支撑位置。
107.根据本文公开的另一方面,提出了一种用于平衡成像装置的成像设备,包括:
108.一个或多个处理器,所述一个或多个处理器单独地或共同地操作以确定成像装置的重心;和
109.具有支撑位置的成像装置的支撑机构,所述支撑位置配置为基于确定的重心移动。
110.在本公开的成像设备的一个示例性实施例中,支撑机构配置成移动支撑位置以补偿成像装置的重心变化。
111.在本公开的成像设备的另一示例性实施例中,支撑位置配置为对准支撑位置与重心。
112.本公开的成像设备的示例性实施例还包括与一个或多个处理器相关联的数据源,用于存储重心数据。
113.在本公开的成像设备的另一示例性实施例中,数据源包括用于由一个或多个处理器检索重心数据的查询表。
114.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:基于操作命令从查询表中检索重心数据。
115.在本公开的成像设备的另一示例性实施例中,操作命令包括焦距和焦点位置中的至少一个。
116.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为根据检索到的重心数据改变支撑位置。
117.在本公开的成像设备的另一示例性实施例中,支撑位置沿成像装置的光轴移动。
118.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:启用支撑机构以移动支撑位置。
119.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:确定成像装置施加的负荷是否在容许范围内。
120.在本公开的成像设备的另一示例性实施例中,容许范围由预定负荷阈值限定。
121.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:基于重心和成像装置的质量来确定负荷。
122.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:根据成像装置的焦距和/或焦点位置来确定负荷。
123.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:当负荷被确定为处于容许范围之外时移动支撑位置。
124.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为确定支撑位置的可调节性。
125.在本公开的成像设备的另一示例性实施例中,根据支撑机构的限制确定可调节性。
126.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为确定支撑位置的期望可移动位置。
127.在本公开的成像设备的另一示例性实施例中,基于命令的姿态和预定负荷阈值来确定期望可移动位置。
128.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:当负荷大于预定负荷阈值时将期望可移动位置等同于最大允许支撑位置,并且当负荷小于或等于预定负荷阈值时将期望可移动位置等同于重心。
129.在本公开的成像设备的另一示例性实施例中,最大允许位置是成像装置的负荷等于预定负荷阈值的位置。
130.在本公开的成像设备的另一示例性实施例中,一个或多个处理器配置为:当期望可移动位置不同于期望可移动位置的当前位置时将期望可移动位置移动到期望可移动位置,并且当期望可移动位置与当前位置相同时维持支撑位置。
131.在本公开的成像设备的另一示例性实施例中,支撑机构是与成像装置和飞行器相关联的云台,所述云台用于提供成像装置的支撑位置。
附图说明
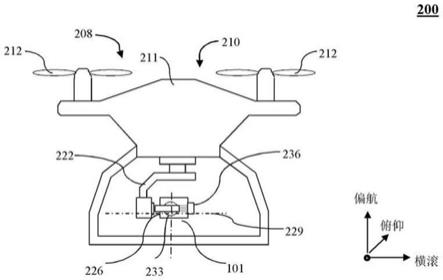
132.图1是示出空中成像系统的实施例的示例性示意图,其中成像装置与飞行器连接。
133.图2是示出用于平衡图1的成像装置的重心的方法的实施例的示例性流程图。
134.图3是示出图2的方法的替代实施例的示例性框图,其中确定成像装置的重心。
135.图4是示出图2的方法的另一替代实施例的另一示例性框图,其中基于重心移动成像装置的支撑位置。
136.图5是示出图2的方法的另一替代实施例的示例性细节流程图,其中响应于镜头运动调节成像装置的支撑位置以对准成像装置的重心。
137.图6是示出图1的空中成像系统的替代实施例的示例性细节图,其中成像装置经由支撑机构支撑。
138.图7是示出图2的空中成像系统的另一替代实施例的示例性细节图,其中成像装置移动以对准支撑位置与重心。
139.图8是示出配置方法的实施例的示例性流程图,其中基于重心初始化图2的空中成像系统。
140.图9是示出图8的配置方法的替代实施例的另一示例性流程图,其中图1的空中成像系统初始化为每个镜头位置设置的允许范围。
141.图10是示出图2的平衡方法的另一替代实施例的示例性流程图,其中基于测量的负荷移动支撑位置。
142.图11是示出图1的空中成像系统的另一实施例的示例性框图,其中成像装置经由云台与无人机(uav)连接。
143.图12是示出图11的云台的实施例的示例性框图。
144.图13是示出图11的成像装置的实施例的示例性框图。
145.图14是示出图11的无人机的实施例的示例性框图。
146.图15是示出图11的空中成像系统的另一替代实施例的示例性框图,其中无人机与成像装置和云台通信。
147.应当注意,附图并未按照比例绘制,且出于说明的目的,整个图中具有类似结构或功能的元件通常由类似的附图标记表示。还应当注意,附图仅旨在便于描述优选实施例。附图并未示出所描述的实施例的每个方面并且也不限制本发明的范围。
具体实施方式
148.由于现有的用于平衡成像装置的重心的方法是复杂的并且需要附加配重和专用电机,因此用于通过移动成像装置的支撑位置来平衡成像装置的重心的支撑系统和方法可以证明是可取的并且为广泛的应用提供基础,例如包括空中成像系统的便携式成像系统。根据如图1所示的空中成像系统的一个实施例,可以实现该结果。
149.参照图1,空中成像系统200示出为包括与飞行器208连接的成像装置101。在图1中,飞行器208可以是例如可从空中捕获图像的无人机(uav)210。
150.成像装置101可通过云台222与飞行器208相关联。云台222可包括任何常规类型的云台并且优选为可绕偏航轴线、俯仰轴线和横滚轴线三个轴线旋转的三维云台。云台222可包括与成像装置101相关联的支撑机构226。支撑机构226可支撑具有可移动支撑位置233的成像装置101。
151.尽管仅出于说明的目的示出和描述为使用三维云台,但是可使用任何其他类型的云台来关联成像装置101与飞行器208,包括但不限于一维云台和/或二维云台。
152.成像装置101可连接至镜头单元236,镜头单元236可通过移动镜头单元236中包括的镜头来放大或缩小。由此,成像装置101的重心108(如图7所示)可在变焦操作期间沿光轴229移动。当成像装置101的重心108偏离支撑位置233时,成像装置101可经由支撑机构226向云台222施加扭力(未示出)。扭力可能是不可预知和/或可控的,并且可能产生用于控制云台222的问题。为了减轻不可预知的扭力的问题,成像装置101的支撑位置233可响应于重心108的变化而移动。
153.通过以本文所述的方式移动支撑位置233,可消除不可预知的扭力或将其控制在允许的范围内。可以防止或限制支撑机构226的任何不希望的动作,从而确保支撑机构226和/或成像装置101的可靠操作。
154.飞行器208可包括多个螺旋桨212,用于提供升力以使飞行器208沿垂直方向移动。多个螺旋桨212还可提供横向力以在存在或不存在沿垂直方向移动的情况下使飞行器208水平地移动。水平移动可包括以受控方式的向前、向后、向左和/或向右移动。通过可控的垂直和/或水平移动,飞行器208可以受控方式沿任何方向接近物体(未示出)。
155.飞行器208可包括用于容纳飞行器208的设备的主体(或机身)211,包括但不限于,用于控制飞行器208、云台222和/或成像装置101的一个或多个控制单元(未示出)。可选地和/或附加地,云台222和/或成像装置101还可分别包括一个或多个控制单元(未示出)。本文所述的所有控制单元可包括硬件、固件、软件或其任何组合。
156.图2示出了用于空中成像系统200的示例性平衡方法100的实施例。如图2所示,平衡方法100示出为基于重心108移动成像装置101的支撑位置233。在图2中,在120处可确定成像装置101的重心108。
157.成像装置101可具有光学变焦能力,该光学变焦能力可通过将镜头单元236(图1中所示)与成像装置101耦接而实现。例如,镜头单元236可在变焦时伸出或缩回。换言之,当成像装置101放大或缩小时,镜头单元236的长度可以改变。镜头单元236的移动可导致成像装置101的重心108偏移。
158.成像装置101的重心108可以指沿光轴229(图1中所示)的选定位置,成像装置101的全部重量可视为集中于该选定位置处。当成像装置101被支撑在选定位置时,成像装置101可沿着光轴229保持平衡。换言之,当成像装置101被支撑于或邻近重心108处时,成像装置101不施加或施加较小的围绕选定支撑位置233的旋转力。
159.成像装置101的重心108的偏移可导致重心108与选定支撑位置233的错位(或分离)。由于错位可能导致支撑装置的不期望的动作,因此错位可能成为成像装置101的支撑装置(例如云台222(图1所示))的问题。
160.为了减轻重心108和支撑位置233的错位,在150处,成像装置101的支撑位置233可基于重心108的移动而移动。因为可以在120处确定重心108,所以成像装置101的支撑位置233可以与确定的重心108一起可控地移动。移动的结果可以消除或减轻重心108的错位,优选在沿光轴229的选定点处。
161.图3示出了平衡方法100的替代实施例。参照图3,在120处确定成像装置101的重心108。为确定成像装置101的重心108,可在122处从数据源(未示出)检索重心数据。
162.数据源可与用于控制支撑装置的移动和/或成像装置101的控制器(未示出)相关联。数据源可以是存储在非暂时性计算机可读介质上的任何合适的数据结构。数据结构可以包括但不限于文件、数据表、电子表格、xml文件、数据库、查询表和/或硬编码数据。
163.在一个实施例中,数据源可以至少部分地提供为查询表。例如,在155处,可基于操作命令从查询表中检索重心数据。表1示出了示例性查询表。
[0164][0165]
表1
[0166]
操作命令可以接收作为从数据源检索数据的输入,并且可包括焦距和焦点位置。检索的输出可以是重心108。例如,在表1中,当焦距为24毫米且焦点位置在焦点位置“1”时,重心108可以在重心位置“2”处。相反,当焦距为24毫米且焦点位置在焦点位置“无穷大”时,重心108可以在位置“12”处等。
[0167]
尽管仅为了说明的目的而示出和描述为包括八个焦距和焦点位置,但是查询表可以包括任何预定数量的焦距和焦点位置组合。通过增加焦距和焦点位置组合的数量,重心108的平衡可以更平滑的方式进行。
[0168]
图4示出了平衡方法100的替代实施例。参照图4,在150处,成像装置101的支撑位置233(图6所示)基于重心108移动。在图4中,可响应于重心108的改变而调节支撑位置233。
[0169]
支撑位置233可以是沿光轴229(图1所示)的位置,成像装置101支撑于该位置处。支撑位置233可以经由支撑装置提供,该支撑装置例如为将成像装置101与例如无人机210的飞行器208连接的云台222(图5中共同示出)。支撑位置233可相对于成像装置101的光轴229上的选定位置进行测量。支撑位置233可相对于成像装置101移动。当期望成像装置101的重心108移动时,在152处可响应于重心108的移动来调整支撑位置233。
[0170]
在调整支撑位置233时,支撑位置233可以在155处与重心108对准。当成像装置101放大或缩小并且重心108被确定时,支撑位置233可在镜头单元236移动之前或之后移动到确定的重心108或朝向确定的重心108移动。在一些实施例中,支撑位置233和镜头单元236可以同步的方式移动。
[0171]
尽管仅出于说明的目的示出和描述为将支撑位置233与重心108对准,但是支撑位置233可以围绕重心108在选定的允许范围内移动。
[0172]
图5示出了平衡方法100的另一替代实施例。参照图5,成像装置101的支撑位置233响应于镜头移动调整为与成像装置101的重心108对准。在图5中,可在310处接收操作命令。
[0173]
操作命令可以包括例如由成像装置101接收的放大命令或缩小命令。在一些实施例中,可以从控制器(未示出)接收操作命令。操作命令可以包括但不限于焦距和/或焦点位
置。可选地和/或附加地,操作命令可以包括可得到焦距和/或焦点位置的其他信息,例如放大倍数。
[0174]
在312处,可以响应于操作命令确定镜头位置设置。换言之,镜头位置设置可以基于操作命令中包含的信息来确定。镜头位置设置可以例如通过焦距和/或焦点位置表示。可以对应于操作命令的任何合适的方式来确定镜头位置设置。
[0175]
在315处,镜头单元236(图1中所示)可根据确定的镜头位置设置移动。镜头单元236可以任何合适的方式移动以变焦,例如经由镜头单元236和/或成像装置101的变焦机构。
[0176]
在317处,可以确定对应于镜头位置设置的支撑位置233。支撑位置233可以是成像装置101被支撑的位置,并且因此可与成像装置101相关。可以参照图2以本文所述的方式确定支撑位置233,包括但不限于,基于镜头位置设置从查询表、电子表格、平面文件和/或数据库中检索重心108。
[0177]
在319处,可基于确定的支撑位置233调整成像装置101的支撑位置233。可以参照图3以本文所述类似的方式移动支撑位置233,以对准确定的支撑位置233。
[0178]
尽管仅出于说明的目的而示出并描述为在调整支撑位置233之前根据镜头位置设置移动镜头单元236,但是镜头单元236和支撑位置233可以任何顺序依次或同时移动或调整。
[0179]
图6示出了空中成像系统200的替代实施例。参照图6,成像装置101示出为经由支撑机构226支撑。支撑机构226具有齿条和齿轮225。在图6中,成像装置101可以沿成像装置101的光轴229移动。
[0180]
成像装置101可以沿光轴229在第一方向221上移动和/或在沿光轴229且与第一方向221相反的第二方向222上移动。在一些实施例中,可提供滑动机构(未示出)以引导成像装置101沿光轴229移动。滑动机构可协助确保成像装置101的平滑滑动。
[0181]
齿条和齿轮225可用于驱动成像装置101沿光轴229移动。齿条和齿轮225可以是能够将旋转运动转换成直线运动的一种直线致动器。齿条和齿轮225可以包括齿条231和齿轮227。齿轮227可以由电机(未示出)驱动以绕垂直于齿条231的轴线235旋转。
[0182]
齿轮227可以具有轮齿,并且轮齿的至少一部分可以与齿条231的选定轮齿啮合。当电机旋转时,齿轮227绕轴线235旋转,并且齿轮227的轮齿可以推动齿条231的轮齿。然后齿条231可以沿光轴229移动成像装置101。电机可以是能够以逆时针方向和/或顺时针方向旋转的任何类型的可控电机,例如步进电机。在一些实施例中,可控制电机的旋转以实现精确的位置和/或速度。
[0183]
齿条231和/或齿轮227可由任何材料制成,包括但不限于金属材料和/或非金属材料,例如塑料材料。齿轮227可由电机以直接或间接的方式驱动。当以直接方式驱动时,电机和齿轮227可以例如通过共享轴线235直接彼此连接。当以间接方式驱动时,电机可以通过轮齿系统(未示出)与齿轮227相关联。轮齿系统可以将旋转传递给齿轮227并且可以调整电机的输出速度,例如减小输出速度。
[0184]
在一些实施例中,成像装置101的支撑位置233可以与齿轮227的轴线235重叠。当齿轮227旋转时,成像装置101可以沿光轴229移动,因此,支撑位置233可相对于成像装置101移动。
[0185]
尽管仅出于说明的目的示出和描述为支撑位置233与轴线235重叠,但是支撑位置233和/或轴线235可以分开设置于沿光轴229的任何合适的位置。可选地和/或附加地,可提供多于一个的齿轮227和/或多于一个的支撑位置233,以可控制地移动支撑位置233。
[0186]
图7示出了空中成像系统200的另一替代实施例。参照图7,成像装置101可移动以将支撑位置233与重心108对准。在图7中,成像装置101可具有用于提供变焦能力的镜头单元236。
[0187]
镜头单元236可以是焦距可能不同的镜头元件的机械组件。当成像装置101放大或缩小时,镜头单元236可以伸出或缩回。成像装置101的第一状态s1示出镜头单元236处于放大位置(或缩回位置),以及第二状态s2和第三状态s1示出镜头单元236处于缩小位置(或伸出位置)。
[0188]
在第一状态s1下,镜头单元236可处于变焦动作之前的位置。例如,镜头单元236可以处于放大位置236a,并且成像装置101的重心108可以在108a处。支撑位置233可以与重心108a对准。在第一状态s1下,成像装置101可施力于支撑位置233上并且不会产生扭力以导致成像装置101绕支撑位置233旋转。换言之,在第一状态s1下,成像装置101不施加旋转力至例如云台222(图1所示)的支撑装置。支撑装置可以不受成像装置101的干扰而操作。
[0189]
在第二状态s2下,镜头单元236可以进行变焦动作,但支撑位置233不会相应地调整。例如,镜头单元236可处于缩小位置236b,并且成像装置101的重心108可以移动到108b。当支撑位置233相对于成像装置101不移动时,可能与重心108b错位。支撑位置233可能与重心108b分离距离d,距离d是由镜头单元236的变焦动作产生的重心108的移动。支撑位置233和重心108的分离可以产生围绕支撑位置233沿光轴229(图1中所示)的旋转扭矩t=m
×
d。换言之,在第二状态s2下,成像装置101可以将旋转力施加到例如云台222的支撑装置上,并因此干扰支撑装置的操作。
[0190]
在第三状态s3下,镜头单元236可调整为与支撑位置233对准。例如,镜头单元236可仍处于缩小位置236b,并且成像装置部101的重心108可以仍然在108b处。为了消除由支撑位置233和重心108的分离产生的扭矩,支撑位置233可以在与重心108的移动相反的方向上移动。在一些实施例中,支撑位置233可以通过将支撑位置233移动距离d而与重心108对准。支撑位置233沿光轴229并且相对于成像装置101。因此,支撑位置233的移动可以通过相对于支撑位置233移动成像装置101来实现。
[0191]
尽管仅出于说明的目的而示出和描述为移动成像装置101,但是支撑位置233也可以通过移动支撑装置而移动。
[0192]
图8示出了示例性配置方法300的一个实施例。参照图8,基于重心108初始化空中成像系统200。基于重心108确定镜头单元236的每个镜头位置设置的期望支撑位置。在图8中,在320处可获取多个镜头位置设置。
[0193]
可以任何合适的方式获取多个镜头位置设置。在一些实施例中,可以通过包括可用于选定的镜头单元236的焦距和焦点位置的所有可能组合获取每个镜头位置设置。在其他一些实施例中,镜头位置设置可以从统计数据获取,例如,基于统计数据从所有可能的组合中导出常用的焦距和焦点位置的组合。可选地和/或附加地,镜头位置设置可通过制造商和/或用户的经验和/或偏好获取。
[0194]
对于每个镜头位置设置,可以在322处获取成像装置101的重心108(图7所示)。如
图6所示和描述的,重心108可以是沿成像装置101的光轴229的位置。在一些实施例中,对于每个镜头位置设置,重心108可通过任何合适的算法计算和/或可通过任何合适的装置测量。
[0195]
在325处,可基于获取的多个重心108确定多个镜头位置设置的期望支撑位置。如本文所述,每个期望支撑位置可通过对准用于镜头位置设置的重心108来确定。可选地和/或附加地,可基于除重心108之外的其他选定因素来确定期望支撑位置。这些因素可包括但不限于,支撑装置的参数和/或与成像装置101连接的镜头单元236的参数。
[0196]
在327处,可存储对应于每个镜头位置设置的确定的期望支撑位置。期望支持位置可存储于可由处理器(未示出)访问的任何非暂时性介质中,包括但不限于文件、数据表、电子数据表、xml文件、数据库、查询表、硬编码于软件等。
[0197]
图9示出了配置方法300的另一实施例。参照图9,对于每个镜头位置设置,可利用支撑位置233的允许范围来初始化空中成像系统200。可基于施加到支撑机构226的负荷来确定镜头单元236(图7所示)的每个镜头位置设置的允许范围。在图9中,在320处可确定多个镜头位置设置。可以与参照图8提出的方式类似的方式确定镜头位置设置。
[0198]
在332处,可测量在每个镜头位置设置处施加至支撑机构226的负荷。负荷可以是围绕支撑位置233沿光轴229(图1中所示)的扭力。由于每个镜头位置设置可以具有期望支撑位置,所以可以确定任何两个相邻镜头位置设置之间的相邻负荷。相邻负荷可确定为:支撑位置233位于一个镜头位置设置的期望支撑位置处并且镜头单元236位于另一镜头位置设置处。
[0199]
任何两个镜头位置设置之间的负荷可通过将两个镜头位置设置之间的所有相邻负荷相加来确定。例如,对于镜头位置{p1,p2,p3,
…
pi,p
i 1
,p
i 2
,p
i 3
,
…
pn},相邻负荷可以为{l1,l2,
…
l
i,
l
i 1
,l
i 2
,
…
l
n-1
},其中l1是p1和p2之间的负荷,l2是p2和p3之间的负荷,li是pi和p
i 1
之间的负荷。p1和p3之间的负荷可以为(l1 l2),以及pi和p
i 3
之间的负荷可以为(li l
i 1
l
i 3
)。因此,在332处,可以确定任何两个相邻镜头位置设置之间的所有相邻负荷。由此,可基于相邻负荷来计算任何两个镜头位置设置之间的负荷。
[0200]
在335处,可基于测量的负荷为每个镜头位置设置确定支撑位置233的允许范围。支撑位置233的允许范围可与支撑机构226直接相关,并可通过比较两个镜头位置设置之间的负荷与最大允许负荷阈值lt1确定。例如,对于镜头位置设置p
i 1
,如果(l
i 1
l
i 2
)小于或等于lt1且(l
i 1
l
i 2
l
i 2
)大于lt1,那么允许范围的上限可以是p
i 3
。此外,如果(l
i-1
l
i-2
)小于或等于lt1且(l
i-1
l
i-2
l
i-3
)大于lt1,那么允许范围的下限可以是p
i-2
。由此,允许范围可以是{p
i-2
,p
i 3
}。
[0201]
在337处,可以参照图8的327处所述的方式存储对应于每个镜头位置设置的确定的允许范围。尽管仅出于说明的目的示出和描述为存储允许范围,但是也可以存储任何两个镜头位置之间的相邻负荷和/或测量的负荷。
[0202]
图10示出了平衡方法100的另一替代实施例。参照图10,支撑位置233基于测量的负荷移动。如图4所示和描述的,在图10中,操作命令可在310处被接收,并且可包括用于变焦镜头单元236的命令。
[0203]
如图4所述,在312处可响应于操作命令确定镜头位置设置,并且在315处镜头单元236可移动至镜头位置设置。镜头位置设置可包括焦距和/或焦点位置。
[0204]
在361处,可测量施加到支撑机构226的负荷。负荷可包括围绕支撑位置233(图1中所示)的扭力。例如,当重心108(图7所示)与支撑位置233不对准时,可以产生扭力。由于,负荷可以因操作命令的不同而改变。例如,当操作命令要求镜头单元236在伸出或缩回超过某个阈值时,重心108可能移动,并且负荷可能相对于支撑机构226变重。
[0205]
在362处,可以确定负荷是否在容许范围内。容许范围可以例如用最大负荷阈值限定。换句话说,当负荷小于或等于最大负荷阈值时,负荷可以确定为在容许范围内。当负荷大于最大负荷阈值时,负荷可以确定为在容许范围之外。最大负荷阈值可以用例如克-毫米的扭矩单位测量。可选地和/或附加地,因为成像装置101的质量可能是常数,所以最大负荷阈值也可以用例如毫米的长度单位测量。在362处,如果负荷被确定为在容许范围内,则可以维持支撑位置233。
[0206]
如果负荷被确定为在容许范围外,则在363处,可基于测量的负荷和/或重心108来确定可抵消至少一部分负荷的期望支撑位置。期望支撑位置可以是成像装置101的重心108,使得负荷将被完全抵消。在一些实施例中,期望支撑位置可以与重心108不同。在一些实施例中,如果支撑位置233移动到期望支撑位置,则期望支撑位置可以比支撑位置233更靠近重心108,以使得负荷会被减小。
[0207]
在365处,确定支撑位置233是否可调。在一些情况下,例如当支撑位置108受到机械限制的限制时,支撑位置233可能不可调节。在一些实施例中,在365处,当确定支撑位置233是否可调时,可以考虑例如云台222(图4所示)的支撑装置的姿态状态。这种姿态状态可以包括但不限于横滚角、俯仰角和偏航角。
[0208]
如果支撑位置233被确定为不可调节,则可以维持支撑位置233。当支撑位置233被确定为可调时,支撑位置233可以移动到或朝向期望支撑位置。在一些实施例中,支撑位置233可以移动,使得支撑位置233与期望支撑位置对准。在其他一些实施例中,支撑位置233可以移动到例如通过支撑机构226(例如齿条和齿轮225(图6中所示))的机械限制确定的最大可调延伸。
[0209]
尽管仅处于说明的目的而示出和描述为在调整支撑位置233之前移动镜头单元236,但是支撑位置233可以在镜头单元236移动之前或者与镜头单元236同时调整。
[0210]
图11示出了示例性空中成像系统500的一个实施例。参照图11,空中成像系统500示出为经由云台222将成像装置101与无人机210连接。在图11中,为了在变焦动作期间平衡成像装置101,云台222、无人机210和成像装置101可彼此通信。
[0211]
云台222可以是提供偏航、俯仰和横滚三种动作的三维云台。由此,云台222的姿态可以包括偏航角、俯仰角和横滚角。出于任何选定的目的,例如用于移动成像装置101的支撑位置233(图1所示),云台222可以将其姿态状态发送至成像装置101和/或无人机210。云台222也可从成像装置101和/或无人机210接收信息。这些信息可包括但不限于镜头位置数据等。
[0212]
成像装置101可以图4所述的方式提供。成像装置101可与一个或多个镜头耦接并且可具有重心108(如图6所示)。成像装置101可将关于镜头位置数据和/或重心108的信息保持和/或发送至云台222和/或无人机210。成像装置101还可从云台222和/或无人机210接收信息,包括但不限于镜头位置数据和/或重心108。
[0213]
无人机210可以是空中成像系统500的控制中心,并且可包含无人机210的飞行状
态,例如速度、方向和/或高度。无人机210可将飞行状态传送至云台222和/或成像装置101。无人机210还可将操作命令传送到云台222和/或成像装置101,例如将变焦操作命令传送到成像装置101和/或将姿态命令传送到云台222。无人机210还可从云台222接收例如姿态状态的信息,并从成像装置101接收例如重心108和镜头位置数据等的信息。
[0214]
尽管仅出于说明的目的示出和描述为在云台222、无人机210和成像装置101之间进行通信,但是空中成像系统500可与例如控制器的其他装置通信以发起操作命令。
[0215]
图12示出了空中成像系统500的云台222的替代实施例。参照图12,空中成像系统500的云台222可包括支撑机构226和云台控制单元237。在图12中,支撑机构226可包括用于进行偏航动作、俯仰动作和/或横滚动作的多达三个旋转机构。
[0216]
为进行这些动作,支撑机构226可包括偏航旋转机构511、俯仰旋转机构512和横滚旋转机构513。云台222的姿态可由旋转机构511、512、513的状态限定。例如,云台222的状态可包括由偏航旋转机构511的位置限定的偏航角、由俯仰旋转机构512的位置限定的俯仰角和/或由横滚旋转机构513的位置限定的横滚角。
[0217]
可选地和/或附加地,支撑机构226可以向云台控制单元237提供旋转信息以确定例如负荷。支撑机构226还可接收信息,例如用于旋转三个旋转机构511、512、513中的任何一个的命令。命令可从云台控制单元237接收。
[0218]
另外,云台222可包括用于获取和提供关于支撑位置233(图1所示)的信息的支撑位置信息单元519。支撑位置233可经由例如位置传感器的传感器(未示出)获取。支撑位置信息可提供至云台控制单元237。
[0219]
云台控制单元237可通过支撑位置确定单元516实时或在任何选定时刻从支撑机构226获取信息。支持位置确定单元516可包括硬件、固件、软件或其任何组合。支撑位置确定单元516可通过任何合适的方式(例如通过支撑位置信息单元519)确定支撑位置233。
[0220]
云台控制单元237可包括用于测量施加到支撑机构226上的扭力负荷的负荷测量单元515。负荷可通过与支撑机构226连接的扭力测量传感器(未示出)测量和/或可基于支撑位置233和成像装置101(图6中共同示出)的重心108的位置计算。
[0221]
重心108的位置可经由包括在云台控制单元237中的镜头信息获取单元517获取。镜头信息获取单元517可以从无人机210和/或从成像装置101接收镜头位置信息。另外,镜头位置信息获取单元517可基于镜头位置信息和成像装置101的质量来获取重心108或者确定重心108。
[0222]
可选地和/或附加地,云台控制单元237可包括支撑位置调节单元518。支撑位置调节单元518可基于经由其他单元515、516、517、518获取的信息来确定期望支撑位置。期望支撑位置可基于重心108、负荷和/或镜头位置信息以本文所述类似的方式确定。
[0223]
图13示出了空中成像系统500的成像装置101的另一可选实施例。参照图13,成像装置101示出为包括成像装置主体151、镜头控制单元153和镜头移动机构155。在图13中,成像装置主体151可包括成像传感器523、成像控制单元525和存储器526。
[0224]
成像传感器523可用于捕获图像。存储器526可以是对成像控制单元525可读的任何非暂时性介质并且可用于存储捕获的图像和用于操作成像装置101的任何数据。存储器526可以从成像装置主体151移除。成像控制单元525可包括配置为单独或共同执行成像装置101的功能的一个或多个处理器。这些功能可包括但不限于从无人机210接收命令、与云
台222通信和/或控制变焦镜头238。
[0225]
镜头控制单元153可与成像装置主体151相关联并且可从成像装置主体151接收控制命令,包括但不限于,设置变焦镜头238的焦距和/或焦点位置。镜头控制单元153可经由镜头移动机构155执行控制命令,例如设置变焦镜头238的焦距和/或焦点位置。
[0226]
可选地和/或附加地,镜头控制单元153可与镜头位置设置信息单元521和/或重心信息单元522相关联。镜头位置设置信息单元521可存储例如焦距和焦点位置的组合、对应的变焦位置等。另外,镜头位置设置信息单元521可存储当前镜头位置。
[0227]
重心信息单元521可存储对应于每个选定的焦距和焦点位置组合的重心108。存储在重心信息单元521中的重心信息可包括成像装置101的重心108。重心数据以及每个对应的焦距和焦点位置的组合可以查询表、电子表格、平面文件和/或数据库的形式存储。
[0228]
镜头控制单元152可根据镜头位置设置(例如从镜头位置设置信息单元521检索的焦距和焦点位置)来控制镜头移动机构155以设置变焦镜头238。在一些实施例中,镜头控制单元152可自动微调变焦镜头238,例如到焦点位置。
[0229]
重心数据可经由镜头控制单元153、通过成像装置主体151的成像控制单元525从重心信息单元522中检索,并被发送至无人机210和/或云台222。
[0230]
尽管仅出于说明的目的示出和描述为使用一个变焦镜头238,但是可通过镜头移动机构155由镜头控制单元153控制多个变焦镜头238。在多个变焦镜头238的情况下,镜头位置设置信息单元521和重心信息单元522可存储多个变焦镜头238的相关信息。
[0231]
尽管仅出于说明的目的示出和描述为分离成像装置主体151、镜头控制单元153和镜头移动机构155,但是镜头控制单元153可与镜头移动机构155和/或成像装置主体151集成。
[0232]
图14示出了空中成像系统500的无人机210的另一替代实施例。参照图14,无人机210示出为包括无人机控制单元351、驱动单元535和检测单元537。在图14中,驱动单元535可包括用于提供驱动无人机210的升力和水平力的多个螺旋桨212(图1所示)。
[0233]
检测单元537可获取无人机210的状态,包括但不限于无人机210的高度、速度和姿态。姿态可包括但不限于无人机210的偏航角、俯仰角和/或横滚角。可考虑检测的无人机210的状态,用于确定成像装置101(图13所示)的负荷。
[0234]
无人机210还可包括用于存储与无人机210、云台222(图12中示出)和/或成像装置101的操作有关的数据的存储器531,存储器531可以是非暂时性介质。存储器531可以从无人机210移除。无人机210可包括通信接口533,用于通过无线连接(未示出)接收操作命令,包括但不限于,无人机操作命令、云台操作命令和/或例如变焦命令的成像命令。
[0235]
无人机210可包括无人机控制单元351,无人机控制单元351可包括用于控制无人机210、云台222和/或成像装置101的动作的一个或多个处理器。无人机控制单元351可包括用于分析经由通信接口533接收的消息的动作确认单元532。在一些实施例中,当接收到信息时,动作确认单元532可确定该消息是否包括操作命令。如果该消息包括操作命令,则动作确认单元532可确定操作命令的类型以及该命令的目标装置。
[0236]
无人机控制单元351可与云台222和/或成像装置101通信。当操作命令被确定为无人机命令时,无人机控制单元351可执行操作命令。当操作命令被确定为云台命令时,无人机控制单元351可将操作命令发送至云台222。当操作命令被确定为成像装置命令时,无人
机控制单元351可将操作命令发送至成像装置101和/或云台222。
[0237]
可选地和/或附加地,无人机控制单元351可从云台222和/或成像装置101检索信息,例如,云台222的姿态状态、成像装置101的支撑位置233和/或成像装置101的镜头位置设置。检索的信息可由无人机控制单元351分析和/或通过无线连接传送至远程位置。
[0238]
图15示出了空中成像系统500的另一可选实施例。参照图15,其中无人机210与成像装置101和云台222通信。在图15中,无人机210可以包括用于接收操作命令的通信界面533。
[0239]
操作命令经由无人机控制单元531进行分析。当操作命令被确定为变焦命令时,无人机控制单元531可将操作命令发送至成像装置101。变焦命令可包括变焦信息,例如缩放级别、视图深度、焦距和/或焦点位置等。成像装置101的成像控制单元525可将操作命令发送至镜头控制单元153。
[0240]
镜头控制单元153可基于变焦命令确定包括焦距和/或焦点位置的镜头位置。另外,镜头控制单元153可控制镜头移动机构155以移动变焦镜头238(图13所示)至镜头位置。镜头控制单元153也可以访问介质,例如存储重心信息的查询表。重心信息可包括在选定的镜头位置设置处的成像装置101的重心108(如图6所示)。可基于镜头位置(例如焦距和/或焦点位置)来检索重心信息。
[0241]
重心信息可经由成像控制单元525发送至云台222的云台控制单元237。云台控制单元237可测量由成像装置101施加到支撑机构226上的负荷,并确定该负荷是否在容许范围内,例如该负荷是否大于最大负荷阈值。如果确定该负荷小于或等于最大负荷阈值,则云台控制单元237可决定维持支撑位置233(如图1所示)。相反,如果确定负荷大于最大负荷阈值,则云台控制单元237可决定将支撑位置233移向重心108。
[0242]
尽管仅出于说明的目的示出和描述为云台控制单元237测量负荷,但是负荷可由云台控制单元237基于重心108和成像装置101的质量计算。
[0243]
当云台控制单元237决定移动支撑位置233(如图1所示)时,云台控制单元237可确定支撑位置233是否可调节。如果支撑位置233被确定为可调节,则云台控制单元237可控制支撑机构226移动支撑位置233到或朝向重心108。
[0244]
尽管仅出于说明的目的示出和描述为传送变焦命令和重心108,但是无人机210、云台222和成像装置101可交换用于操作无人机210、云台222和成像装置101的任何需要的信息。
[0245]
所描述的实施例适应各种修改和替代形式,并且其具体的示例已经在附图中通过示例的方式示出并在本文中详细描述。然而,应当理解,所描述的实施例不限于所公开的特定形式或方法,相反,本发明将覆盖所有修改、等同物和替代物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。