1.本实用新型属于离心机技术领域,具体涉及一种全自动上下料高速离心机。
背景技术:
2.在生物实验室中,操作人员的工作重复度高,自动化的实验操作方案可以有效降低人工成本。目前高速离心机的自动化上、下料方案还存在诸多缺陷。
3.在生物实验室,会经常使用到离心机,较高转速的离心机多采用直流电机驱动,这种电机在停机后,转子的停止位置不固定,导致这种离心机在实现自动化上、下料方面存在一定困难,因为设备无法定位转子的停止位置。当然,可以通过视觉传感器进行定位,但是这种方法并不可靠。
技术实现要素:
4.本实用新型所要解决的技术问题是针对现有技术的现状,而提供一种全自动上下料高速离心机。
5.本实用新型解决上述技术问题所采用的技术方案为:提出一种全自动上下料高速离心机,包括:工作台;
6.离心机转子,其设置在工作台上,所述离心机转子上设有若干放置位,所述放置位用于放置离心管,所述离心机转子用于带动所述放置位内的离心管进行离心;
7.复位机构,其设置在工作台上,所述复位机构用于将所述离心机转子回复至初始位置并锁定;
8.上下料机构,包括设置在工作台上的离心管架和夹取移动组件,所述夹取移动组件用于将离心管架上的离心管移动至离心机转子处以及将离心机转子处的离心管移动至离心管架上;
9.取放机构,其设置在工作台上,所述取放机构用于将上下料机构处的离心管放置在所述离心机转子上的放置位内以及将所述离心机转子上放置位内的离心管取出。
10.与现有技术相比,本实用新型的优点在于:本实用新型中的离心机转子在使用过程中无论停留在任意位置,复位机构都会将离心机转子回复到初始位置上并锁定,方便取放机构从离心机转子上的放置位内拿取离心管,配合上下料机构完成离心管的上下料,实现离心机的自动化操作。
11.在上述的一种全自动上下料高速离心机中,所述复位机构包括设置在所述离心机转子上的定位块,所述定位块的顶部设有定位槽,所述复位机构还包括设置在所述定位块上方的复位块和驱动所述复位块转动的第一电机,所述复位块的下端设有复位孔,所述复位孔内设置压缩弹簧,所述压缩弹簧的一端连接有钢珠,所述钢珠部分伸出所述复位孔外,所述复位块滑动连接在第一直线模组上,所述第一直线模组竖向设置在工作台。离心机转子停止转动后,通过第一直线模组带动复位块相对定位块向下移动,使得复位块的钢珠与定位块相接触,之后启动第一电机带动复位块转动,使得复位块上的钢珠相对定位块进行
转动。钢珠转动至定位块上的定位槽处时,钢珠在压缩弹簧的作用下会部分嵌入定位槽内,之后钢珠会带动定位块一起转动,从而带动离心机转子一起转动,将离心机转子转动至预设的初始位置上,第一电机停止转动后,离心机转子也会停留在预设的初始位置上,此时钢珠仍部分嵌入在定位槽内,实现离心机转子的位置锁定,避免离心机转子的随意转动。本实用新型中的第一电机和第一直线模组与控制中心通讯连接,直线模组是一种位置、速度可控的成熟产品。
12.在上述的一种全自动上下料高速离心机中,所述第一直线模组上滑动连接有第一安装板,所述第一电机设置在第一安装板上,所述第一安装板上转动连接有转动块,所述复位块连接在所述转动块的下端,所述第一电机通过传送带与所述转动块相连。第一电机转动通过传送带带动转动块转动,从而转动块带动复位块进行转动。而且将第一电机和转动块、复位块均设置在第一安装板处,结构紧凑,减小了全自动高速离心机的体积。
13.在上述的一种全自动上下料高速离心机中,所述取放机构包括设置第一安装板上的伸缩杆,所述伸缩杆的末端设有吸盘,所述吸盘用于吸取离心管。当复位机构带动离心机转子回复到初始位置上时,设置在第一安装板上的伸缩杆伸长,使得伸缩杆末端的吸盘与离心管转子上放置位内的离心管接触,吸盘内部施压,将离心管吸牢,伸缩杆收缩从而将离心管取出,完成从放置位内取出离心管的操作。将离心管放置在离心机转子上的放置位内时,首先复位机构将离心机转子回复到初始的位置上,吸盘首先将离心管吸牢,配合第一直线模组和伸缩杆实现将离心管放置到离心机转子的放置位内。
14.在上述的一种全自动上下料高速离心机中,所述放置位沿周向间隔均布在所述离心机转子上。当取放机构将离心管放置在吸盘正对的一个放置位后,第一电机带动转动块转动一个离心机槽位角度,或n个离心机槽位角度(n为1,2,3
…
),转动块通过复位块上的钢珠带动离心机转子转动一个离心机槽位角度,或n个离心机槽位角度(n为1,2,3
…
),从而方便实现多个离心管的上料操作。同理也可实现多个离心管的下料操作。
15.在上述的一种全自动上下料高速离心机中,所述伸缩杆设置在第四安装板上,所述第四安装板连接在第一安装板。取放机构设置在复位机构的第一安装板上,配合复位块带动离心机转子的转动,实现离心机上所有离心管的自动化上下料操作,而且结构紧凑。
16.在上述的一种全自动上下料高速离心机中,所述伸缩杆为电动伸缩杆。电动伸缩杆与控制中心通讯连接,方便实现伸缩杆伸长与缩短的控制。
17.在上述的一种全自动上下料高速离心机中,所述夹取移动组件包括横向设置在工作台上的第二直线模组,所述第二直线模组上滑动连接有第二安装板,所述第二安装板上设有竖向设置的第三直线模组,所述第三直线模组上滑动连接有第三安装板,所述第三安装板上设有离心管夹爪,所述离心管夹爪用于夹取离心管。上料时,在第二直线模组和第三直线模组的配合下,离心机夹爪从离心管架处夹取到离心管,并移动至离心机转子处,然后在取放机构的配合下将离心管放置到离心机转子的放置位内,完成离心管的上料。下料时,在第二直线模组和第三直线模组的配合下,离心管夹爪从取放机构处夹取到离心管,移动至离心管架上,将离心后的离心管放置在离心管架上,完成离心管的下料操作。第二直线模组和第三直线模组与控制中心通讯连接。
18.在上述的一种全自动上下料高速离心机中,所述离心管夹爪为伺服旋转电爪。伺服旋转电爪与控制中心通讯连接,由控制中心控制什么时候夹紧、松开以及旋转,完成离心
管的上下料操作。
附图说明
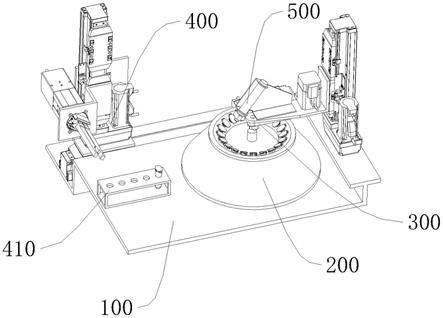
19.图1为本实用新型一个实施方案的整体结构示意图;
20.图2为本实用新型一个实施方案的离心机转子的结构示意图;
21.图3为本实用新型一个实施方案的复位机构和取放机构的结构示意图;
22.图4为本实用新型一个实施方案的复位块的内部结构示意图;
23.图5为本发一个实施方案的上下料机构的结构示意图。
24.图中,100、工作台;200、离心机转子;210、放置位;220、定位块;230、定位槽;300、复位机构;310、第一电机;320、转动块;330、复位块;331、复位孔;332、压缩弹簧;333、钢珠;340、第一安装板;350、第一直线模组;360、传送带;400、上下料机构;410、离心管架;420、夹取移动组件;421、第二直线模组;422、第二安装板;423、第三直线模组;424、第三安装板;425、离心管夹爪;500、取放机构;510、第四安装板;520、伸缩杆;530、吸盘。
具体实施方式
25.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
26.如图1、图2,本实用新型一种全自动上下料高速离心机,包括:工作台100;离心机转子200,其设置在工作台100上,离心机转子200上设有若干放置位210,放置位210用于放置离心管,离心机转子200用于带动放置位210内的离心管进行离心;复位机构300,其设置在工作台100上,复位机构300用于将离心机转子200回复至初始位置并锁定;上下料机构400,包括设置在工作台100上的离心管架410和夹取移动组件420,夹取移动组件420用于将离心管架410上的离心管移动至离心机转子200处以及将离心机转子200处的离心管移动至离心管架410上;取放机构500,其设置在工作台100上,取放机构500用于将上下料机构400处的离心管放置在离心机转子200上的放置位210内以及将离心机转子200上放置位210内的离心管取出。
27.如图2、图3、图4所示,复位机构300包括设置在离心机转子200上的定位块220,定位块220的顶部设有定位槽230,复位机构300还包括设置在定位块220上方的复位块330和驱动复位块330转动的第一电机310,复位块330的下端设有复位孔331,复位孔331内设置压缩弹簧332,压缩弹簧332的一端连接有钢珠333,钢珠333部分伸出所述复位孔331外,复位块330滑动连接在第一直线模组350上,第一直线模组350竖向设置在工作台100。本实用新型中的第一电机310和第一直线模组350与控制中心通讯连接,直线模组是一种位置、速度可控的成熟产品。第一直线模组350上滑动连接有第一安装板340,第一电机310设置在第一安装板340上,第一安装板340上转动连接有转动块320,复位块330连接在转动块320的下端,第一电机310通过传送带360与转动块320相连。
28.取放机构500包括设置第一安装板340上的伸缩杆520,伸缩杆520的末端设有吸盘530,吸盘530用于吸取离心管。放置位210沿周向间隔均布在离心机转子200上。伸缩杆520设置在第四安装板510上,第四安装板510连接在第一安装板340。伸缩杆520为电动伸缩杆,电动伸缩杆与控制中心通讯连接。
29.如图1、图5所示,夹取移动组件420包括横向设置在工作台100上的第二直线模组421,第二直线模组421上滑动连接有第二安装板422,第二安装板422上设有竖向设置的第三直线模组423,第三直线模组423上滑动连接有第三安装板424,第三安装板424上设有离心管夹爪425,离心管夹爪425用于夹取离心管。第二直线模组421和第三直线模组423与控制中心通讯连接。离心管夹爪425为伺服旋转电爪,伺服旋转电爪与控制中心通讯连接,由控制中心控制什么时候夹紧、松开以及旋转。
30.工作原理:上料:首先,第一直线模组350带动复位块330相对离心机转子200向下移动,使得复位块330上的钢珠333与离心机转子200上的定位块220相接触,启动第一电机310带动复位块330转动,使得复位块330上的钢珠333相对定位块220进行转动。钢珠333转动至定位块220上的定位槽230处时,钢珠333在压缩弹簧332的作用下会部分嵌入定位槽230内,之后钢珠333会带动定位块220一起转动,从而带动离心机转子200一起转动,将离心机转子200转动至预设的初始位置上,第一电机310停止转动后,离心机转子200也会停留在预设的初始位置上,此时钢珠333仍部分嵌入在定位槽230内,实现离心机转子200的位置锁定,避免离心机转子200的随意转动,完成离心机转子200的复位,此时第一安装板340上的伸缩杆520的吸盘530正对离心机上的一个放置位210。然后,第二直线模组421带动第二安装板422横向移动至工作台100上的离心管架410处,由第三直线模组423带动第三安装板424上的离心管夹爪425向下移动至离心管架410处,离心管夹爪425为伺服旋转电爪,通过伺服旋转电爪完成对离心管的夹取,之后第二直线模组421带动离心管夹爪425移动至离心机转子200处,离心管夹爪425旋转将离心管的旋转角度与离心管的放置位210角度相对应。最后,吸盘530将离心管吸紧在吸盘530上,离心管夹爪425松开,之后伸缩杆520伸长将离心管放置在吸盘530正对的放置位210内,完成一个离心管的上料操作。
31.当取放机构500将离心管放置在吸盘530正对的一个放置位210后,第一电机310带动转动块320转动一个离心机槽位角度,或n个离心机槽位角度(n为1,2,3
…
),转动块320通过复位块330上的钢珠333带动离心机转子200转动一个离心机槽位角度,或n个离心机槽位角度(n为1,2,3
…
),从而方便实现多个离心管的上料操作。
32.同理,离心机下料过程为上料过程的逆过程。所以本实用新型中的离心机转子200在使用过程中无论停留在任意位置,复位机构300都会将离心机转子200回复到初始位置上并锁定,方便取放机构500从离心机转子200上的放置位210内拿取离心管,配合上下料机构400完成离心管的上下料,实现离心机的自动化操作,自动化程度高。
33.本文中所描述的具体实施例仅仅是对本实用新型作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。