1.本实用新型属于导弹对接系统,特别涉及一种弹体舱段自动对接系统。
背景技术:
2.随着数字化智能制造的高速发展,导弹研制行业也已进入自动化、数字化的高生产效率的新阶段。目前国内导弹对接装配大部分仍以人工方式进行,舱段之间的对接使用吊装配合人工,此种方法操作人员数量多、劳动强度大、舱段重复放置精度低。对接过程中,舱段间安装孔位置需要弹体进行圆周方向滚转,人工目测滚转角度需要依靠操作人员的经验和技能水平,需要反复滚转、对准、退回等操作,对接精度差导致工作效率低、可靠性差。导弹装配车间多为易燃易爆环境,危险系数高,操作人员生命安全保障低。不能满足导弹生产装配的高安全性、高精度、高效率以及高可靠性要求。
技术实现要素:
3.本发明目的在于解决上述技术问题,提供一种在方形的对接安装架上面左侧装有两个调姿机构,两个调姿机构之间装有货叉机构,右侧装有机器人非接触式测量机构自动上料、自动测量、自动调姿对接的一种弹体舱段自动对接系统。
4.本实用新型解决技术问题所采用的技术方案是:一种弹体舱段自动对接系统,包括方形的对接安装架,在对接安装架的前侧左端安装一台agv转运机构一,agv转运机构一的左面安装一台agv转运机构二;agv转运机构一包括转运车体,其特征在于:在对接安装架上面的对接安装架上梁上面固定一个导轨,在对接安装架上面的对接安装架下梁上面装有多个用螺栓、螺母组成的可调节的底座;在转运车体上面装有舱段支撑架三,舱段支撑架三两端上面固定有支撑抱环安装架三,中间和右端用螺栓固定有支撑抱环三;其特征在于在对接安装架上面左侧装有两个调姿机构,调姿机构的左侧装有底座移动机构,两个调姿机构中间装有货叉机构一,右侧装有机器人非接触式测量机构一;在对接安装架的右端装有暂存架机构中的固定缓存架,在固定缓存架的右端装有舱段支撑架二,在舱段支撑架二的右端装有双向推动架,在舱段支撑架二的后侧装有中间推动架。
5.所述的调姿机构,包括在对接安装架上平面左右两侧固定有调姿机构的调姿机构底座,调姿机构底座下面两端固定有直线滑块二,直线滑块二下面设有滑动凹槽;在调姿机构底座右端上面用螺栓固定有减速器安装座,左侧上面焊接有丝杠安装座,丝杠安装座上装有滚珠丝杠,滚珠丝杠下面装有径向调姿机构,滚珠丝杠与减速器安装座之间装有伺服电机和伺服电机电源线防爆接头;在伺服电机轴与滚珠丝杠连接驱动,其上面装有调姿升降机构中的调姿升降安装架,调姿升降机构的右侧装有升降伺服电机及减速器,左侧装有联轴器,联轴器的左面装有螺旋升降器;在升降安装架的两侧上面固定有螺旋升降器,在螺旋升降器中间用螺旋升降器法兰螺母装有浮动微调机构中的浮动安装板;在浮动安装板的两端上面固定有气缸下安装座,在气缸下安装座上面用销轴铰连接一个复动型超薄气缸,复动型超薄气缸的活塞杆端头用螺母气缸上安装座连接,气缸上安装座固定在舱段抱环机
构中的叉形的抱环固定框架上;抱环固定框架的左上端装有搭扣,右上端用螺钉固定一个防撞限位机构座,在防撞限位机构座上用螺母固定一个防撞螺杆;在抱环固定框架右端上面用阻尼轴活动地装有半抱环框架,在半抱环框架和抱环固定框架内侧均匀分布设有多个垫块;在抱环固定框架中间装有滚转限位机构,滚转限位机构下面装有滚转辊。
6.所述的货叉机构一,包括在对接安装架下梁中间装有一个货叉机构一的货叉升降底座,货叉升降底座的两侧固定有直线轴承,直线轴承中装有导向轴,在导向轴的上端固定有货叉安装板,中上部装有升降安装板二;货叉升降底座上面装有两个下限位块,升降安装板二上面装有两个限位块,导向轴上端固定有货叉机构二;货叉机构二上面两侧装有伸缩式货叉;伸缩式货叉上面装有舱段支撑板一的支撑抱环安装板,支撑抱环安装板两端上面装有支撑抱环一。
7.所述的底座移动机构,包括在对接安装架的左端上面装的导轨上装有底座移动机构,底座移动机构下面均匀分布装有多个直线滑块一,在直线滑块上固定一个底座移动固定架。在底座移动固定架下面固定有电机座,电机座上装有轴向驱动伺服电机,电机轴上固定一个驱动齿轮,驱动齿轮与上面的齿条相啮合;单向伸缩电缸固定在直线滑块一的下面,两个直线滑块一之间固定升降安装板二,在升降安装板二中间固定一个驱动链条座,驱动链条座用销轴装有升降链轮,升降链轮与驱动链条相啮合,驱动链条左端与单向伸缩电缸右端连接,下端用销轴与驱动链条连接块连接,链条连接块固定在货叉升降底座中间上面。
8.所述的机器人非接触式测量机构一,包括在对接安装架下方地面上装有机器人非接触式测量机构一的机器人底座,在机器人底座上面装有pr-10防爆机器人,在机器人非接触式测量机构一的手臂下面装有机器人非接触式测量机构二的异形的测量安装架;在测量安装架的上横梁上面和中间立杆下端装有三个点激光传感器,在两侧的直角形杆上面装有工业用防爆照相机。
9.所述的暂存架机构,包括在对接安装架右端的地面上装有固定缓存架;在舱段支撑架二的左侧后面装有中间推动架;在舱段支撑架二的右端装双向推动架;固定缓存架包括在固定缓存架底座上面固定有多个myl-32-q万向球轴承。
10.所述的中间推动架,包括中间推动架的中间推动架框架的中间下面三轴气缸,下面装三个万向球安装板。
11.所述的双向推动架,包括双向推动架的双向推动架框架的上侧、右侧中间装有三轴气缸,右侧左面中间装有三个万向球安装板,下端装有五个ubf-18-a法兰型万向球。
12.本实用新型的有益效果是:
13.1)利用agv转运机构和货叉机构一配合实现导弹舱段的自动上下料,减少舱段吊装次数和操作人员数量,提高导弹运输过程的自动化程度及操作人员安全性;
14.2)调姿机构由软件控制自动进行调姿、对接动作,有效减少操作人员数量,降低员工劳动强度,提高工作效率和对接精度,实现舱段的柔性装配;
15.3)机器人非接触式测量机构一由软件控制自动测量、计算、反馈对接舱段特征点位置,避免反复对准退回等动作,有效减少对准时间,提高对接一致性及可靠性;
16.4)调姿机构具备自动调节功能,提高设备可靠性。
附图说明
17.以下结合附图,以实施例具体说明。
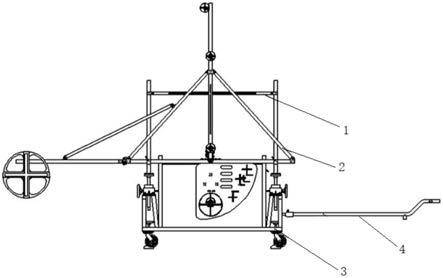
18.图1是弹体舱段自动对接系统的主视图;
19.图2是图1中底座移动机构、调姿机构、货叉机构、机器人非接触式测量机构等部件的主视图;
20.图3是图1中调姿机构的主视图;
21.图4是图2中货叉机构一的主视图;
22.图5是图1底座移动机构的主视图;
23.图6是图1中机器人非接触式测量机构一的主视图;
24.图7是图1中自动化舱段对接系统正面的主视图;
25.图8是图1中固定缓冲架的主视图;
26.图9是图1中中间推动架的主视图;
27.图10是图1中双向推动架的主视图;
28.图11是图1中agv转运机构一;
29.图12是图1中agv转运机构二主视图。
30.图中:1-对接安装架;1-1-导轨;1-2-对接安装架上梁;1-3-可调底座;1-4-齿条;1-5-对接安装架下梁;2-底座移动机构;2-1-底座移动固定架;2-2-直线滑块一;2-3-单向伸缩电缸;2-4-驱动齿条;2-5-驱动链条座;2-6-升降链轮;2-7-轴向移动伺服电机;2-8-驱动链轮;2-9-电机座;2-10-驱动链条连接块;3-调姿机构;3-1-调姿机构底座;3-1-1-直线滑块二;3-2-径向调姿机构;3-2-1-滚珠丝杠;3-2-2-伺服电机;3-2-2-1-伺服电机电源线防爆接头;3-2-3-丝杠安装座;3-2-4-减速器安装座;3-3-调姿升降机构;3-3-1-螺旋升降器;3-3-1-1-螺旋升降器法兰螺母;3-3-1-2-螺旋升降器丝杠;3-3-2-升降伺服电机及减速器;3-3-3-升降安装架;3-3-4-联轴器;3-3-5-升降限位柱;3-4-浮动微调机构;3-4-1-气缸上安装座;3-4-2-复动型超薄气缸;3-4-2-1-气缸上腔进出气接口;3-4-2-2-气缸下腔进出气接口;3-4-3-气缸下安装座;3-4-4-浮动安装板;3-5-舱段抱环机构;3-5-1-抱环固定框架;3-5-2-滚转辊;3-5-3-搭扣;3-5-4-滚转限位结构;3-5-5-垫块;3-5-6-半抱环框架;3-5-7-阻尼轴;3-5-8-防撞限位机构座;3-5-8-1-防撞螺杆;3-5-8-2-螺母;4-货叉机构一;4-1-货叉升降底座;4-1-1-上限位块;4-1-2-下限位块;4-1-3-直线轴承;4-1-4-导向轴;4-1-5-升降安装板二;4-2-货叉机构二;4-2-1-货叉安装板;4-2-2-伸缩式货叉;4-3-舱段支撑板一;4-3-1-支撑抱环安装板;4-3-2-支撑抱环一;5-机器人非接触式测量机构一;5-1-机器人底座;5-2-pr-10防爆机器人;5-3-机器人非接触式测量机构二;5-3-1-测量安装架;5-3-2-点激光传感器;5-3-3-工业用防爆相机;6-暂存架机构;6-1固定缓存架;6-1-1-固定缓存架框架;6-2-中间推动架;6-2-1-中间拖动架框架;6-3-双向推动架;6-3-1-双向拖动架框架;6-3-2-三轴气缸;6-3-3-万向球安装板;6-3-4-myl-32-q万向轴承;6-3-5-ubf-18-a法兰型万向球;7-舱段支撑架二;8-agv转运机构一;8-1-转运车体;8-2-舱段支撑架三;8-2-1-支撑抱环安装架三;8-2-2支撑抱环三;9-agv转运机构二,10-b舱段,11-c舱段。
具体实施方式
31.实施例,参照附图,一种弹体舱段自动对接系统,包括方形的对接安装架1,在对接
安装架1的前侧左端安装一台agv转运机构一8,agv转运机构一8的左面安装一台agv转运机构二9;agv转运机构一8包括转运车体8-1,其特征在于:在对接安装架1上面的对接安装架上梁1-2上面固定一个导轨1-1,在对接安装架1上面的对接安装架下梁1-5上装有四个用螺栓、螺母组成的调节的底座1-3;在转运车体8-1上面装有舱段支撑架三8-2,舱段支撑架三8-2两端上面固定有支撑抱环安装架三8-2-1,中间和右端用螺栓固定有支撑抱环三8-2-2;其特征在于在对接安装架1上面左侧装有两个调姿机构3,调姿机构3的左侧装有底座移动机构2,两个调姿机构3中间装有货叉机构一4,右侧装有机器人非接触式测量机构一5;在对接安装架1的右端装有暂存架机构6中的固定缓存架6-1,在固定缓存架6-1的右端装有舱段支撑架二7,在舱段支撑架二7的右端装有双向推动架6-3,在舱段支撑架二7的后侧装有中间推动架6-2。
32.所述的调姿机构3(见附图2、3),包括在对接安装架1上平面左右两侧固定有调姿机构3的调姿机构底座3-1,调姿机构底座3-1下面两端固定有直线滑块二3-1-1,直线滑块二3-1-1下面设有滑动凹槽;在调姿机构底座3-1右端上面用螺栓固定有减速器安装座3-2-4,左侧上面焊接有丝杠安装座3-2-3,丝杠安装座3-2-3上装有滚珠丝杠3-2-1,滚珠丝杠3-2-1下面装有径向调姿机构3-2,滚珠丝杠3-2-1与减速器安装座3-2-4之间装有伺服电机3-2-2和伺服电机电源线防爆接头3-2-2-1;在伺服电机3-2-2轴与滚珠丝杠3-2-1连接驱动,其上面装有调姿升降机构3-3中的调姿升降安装架3-3-3,调姿升降机构3-3的右侧装有升降伺服电机及减速器3-3-2,左侧装有联轴器3-3-4,联轴器3-3-4的左面装有螺旋升降器3-3-1;在升降安装架3-3-3的两侧上面固定有螺旋升降器3-3-1-2,在螺旋升降器3-3-1-2中间用螺旋升降器法兰螺母3-3-1-1装有浮动微调机构3-4中的浮动安装板3-4-4;在浮动安装板3-4-4的两端上面固定有气缸下安装座3-4-3,在气缸下安装座3-4-3上面用销轴铰连接一个复动型超薄气缸3-4-2,复动型超薄气缸3-4-2的活塞杆端头用螺母气缸上安装座3-4-1连接,气缸上安装座3-4-1固定在舱段抱环机构3-5中的叉形的抱环固定框架3-5-1上;抱环固定框架3-5-1的左上端装有搭扣3-5-3,右上端用螺钉固定一个防撞限位机构座3-5-8,在防撞限位机构座3-5-8上用螺母3-5-8-2固定一个防撞螺杆3-5-8-1;在抱环固定框架3-5-1右端上面用阻尼轴3-5-7活动地装有半抱环框架3-5-6,在半抱环框架3-5-6和抱环固定框架3-5-1内侧均匀分布设有四个垫块3-5-5;在抱环固定框架3-5-1中间装有滚转限位机构3-5-4,滚转限位机构3-5-4下面装有滚转辊3-5-2。
33.所述的货叉机构一4(见附图2、4),包括在对接安装架1下梁中间装有一个货叉机构一4的货叉升降底座4-1,货叉升降底座4-1的两侧固定有直线轴承4-1-3,直线轴承4-1-3中装有导向轴4-1-4,在导向轴4-1-4的上端固定有货叉安装板4-2-1,中上部装有升降安装板二4-1-5;货叉升降底座4-1上面装有两个下限位块4-1-2,升降安装板二4-1-5上面装有两个限位块4-1-1,导向轴4-1-4上端固定有货叉机构二4-2;货叉机构二4-2上面两侧装有伸缩式货叉4-2-2;伸缩式货叉4-2-2上面装有舱段支撑板一4-3的支撑抱环安装板4-3-1,支撑抱环安装板4-3-1两端上面装有支撑抱环一4-3-2。
34.所述的底座移动机构2(见附图2、5),包括在对接安装架1的左端上面装的导轨1-1上装有底座移动机构2,底座移动机构2下面均匀分布装有四个直线滑块一2-2,在直线滑块一2-2上固定一个底座移动固定架2-1,在底座移动固定架2-1下面固定有电机座2-9,电机座2-9上装有轴向驱动伺服电机2-7,电机轴上固定一个驱动齿轮2-8,驱动齿轮2-8与上面
2-2;支撑抱环8-2-2中装有agv转运装置9。
50.设备中的单向伸缩电缸2-3、轴向移动伺服电机2-7、伺服电机3-2-2、升降伺服电机3-3-2、pr-10防爆机器人5-2、点激光传感器5-3-2、工业用防爆相机5-3-3等所有电气设备均用导线与设备电气控制装置中的控制电路连通,并通过运行方式预先编程,进行自动控制。三轴气缸3-5-3的缸体上设有左右腔进出气接口,复动型超薄气缸3-4-2的缸体上设有气缸下腔进出气接口3-4-8和气缸上腔进出气接口3-4-9,气缸各进出气接口均用管路与压气控制系统中的电磁阀连通,并予以控制;电磁阀用导线与电气控制装置中的控制电路连通。所述的agv转运装置9的上部装有舱段支撑架二7,在舱段支撑架二7上装c舱段11。
51.本实用新型的设计原理是:通过agv转运装置9、agv转运车8和货叉机构一4实现b舱段10、c舱段11的自动上料,由机器人非接触式测量机构一5自动测量计算b舱段10、c舱段11的偏差数据,调姿机构3自动调整b舱段10的形态,实现弹体舱段的自动移动和对准。通过局域网无线加密方式与电气控制电路连接,通过编程实现自动控制运行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。