1.本公开涉及光学技术领域,具体地,涉及一种自动对焦马达及摄像模组。
背景技术:
2.光学器件的自动对焦过程是驱动光学器件沿某个预设方向移动,如沿光轴方向移动,以改变焦距。通常,光学器件会安装在某个基体上,以通过该基体与另一个基体之间的相对运动来实现光学器件的运动。相关技术中,为了给两个基体之间的运动提供支撑,通常会在两个基体之间接触设置有滚珠,例如中国专利申请202110174758.7提供了一种自动对焦马达,该马达的运动部和固定部之间设置有多列滚珠,并且每列滚珠均包括多个滚珠。但是在实际应用中,由于模具的成型工艺,加工时零件会出现拔模角度,参照图1,如果采用该申请中滚珠的设置方式,运动部20’在相对于固定部10’运动时会向图面左侧或右侧倾斜而贴在相应的一列滚珠排30’上,而另一侧的滚珠排30’所形成的直线则会影响运动部20’的沿预设方向的运动,从而影响产品的使用性能。
技术实现要素:
3.本公开的第一个目的是提供一种自动对焦马达,以至少部分地解决相关技术中存在的问题。
4.本公开的第二个方面是提供一种摄像模组,该摄像模组使用本公开提供的自动对焦马达。
5.为了实现上述目的,本公开提供一种自动对焦马达,用于驱动光学器件沿预设方向运动,所述马达包括第一基体和能够与所述第一基体在所述预设方向上相对运动的第二基体,所述光学器件安装于所述第一基体或所述第二基体,其中,所述马达还包括接触设置在所述第一基体与所述第二基体之间的至少两个沿所述预设方向排列的第一滚珠和一个第二滚珠,以及设置于所述第一基体和所述第二基体的磁吸组件,所述第二滚珠与所述第一滚珠设置在所述第二基体的对侧,所述磁吸组件配置为使得所述第二基体被朝向所述第一滚珠的一侧磁吸。
6.可选地,所述磁吸组件包括设置于所述第一基体和所述第二基体中的一者的多个磁体和设置于所述第一基体和所述第二基体中的另一者的与所述磁体一一对应多个的磁性件,所述磁体和所述磁性件配置为所产生的磁吸力能够使得所述第一基体与所述第二基体产生相对转动的趋势。
7.可选地,所述磁体包括第一磁体和第二磁体,所述磁性件包括第一磁性件和第二磁性件,所述第一磁体与所述第二磁体设置于所述马达的对侧且错开布置。
8.可选地,所述第一磁体和所述第一磁性件与所述第一滚珠同侧设置,且所述第一磁体和所述第一磁性件产生的磁吸力设置成大于所述第二磁体和所述第二磁性件产生的磁吸力。
9.可选地,所述马达包括设置于所述第一基体和所述第二基体中的一者的磁石和设
置于所述第一基体和所述第二基体中的另一者的线圈,所述线圈在通电后能够与所述磁石产生电磁感应,以驱动使得所述第一基体与所述第二基体相对运动,其中,所述磁石配置为所述磁体。
10.可选地,所述第一滚珠和所述第二滚珠设置在所述第二基体的斜对角处。
11.可选地,所述第一滚珠和所述第二滚珠的外周包覆有润滑膜层。
12.可选地,所述第一基体的侧壁形成有沿所述预设方向延伸的第一v型槽,所述第二基体的侧壁形成有沿所述预设方向延伸并与所述第一v型槽开口相对的第二v型槽,所述第一滚珠接触设置在所述第一v型槽和所述第二v型槽之间。
13.可选地,所述第一基体或所述第二基体的侧壁形成有沿所述预设方向延伸的方形槽,所述第二滚珠接触设置在所述方形槽和与所述方形槽相对的侧壁之间。
14.根据本公开第二个方面,还提供一种摄像模组,包括光学器件和本公开提供的自动对焦马达。
15.通过上述技术方案,磁吸组件使得第二基体可以保持贴紧第一滚珠,多个第一滚珠构成的滚珠列可以对第一基体和第二基体的相对运动提供导向,而设置在第一滚珠对侧的第二滚珠的数量为一个,该一个第二滚珠可以适应于零部件的拔模角度滚动,可以对第二基体提供支撑。本公开实施例中的第一滚珠结合第二滚珠的应用,可以很好地适用于第一基体或第二基体的对面为非平行面的情况,通过第一滚珠支撑,第二滚珠导向,保证了第二基体的运动过程可以顺畅平稳,从而保证产品性能。
16.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
17.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
18.图1是现有技术中自动对焦马达的结构示意图;
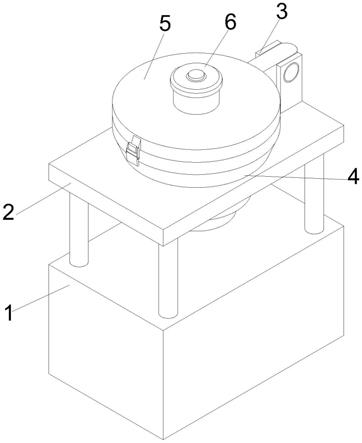
19.图2是本公开一示例性实施方式提供的自动对焦马达的结构示意图;
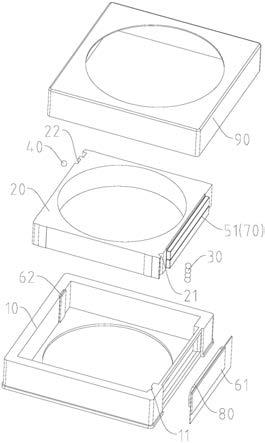
20.图3是本公开一示例性实施方式提供的自动对焦马达的分解图;
21.图4是本公开一示例性实施方式提供的自动对焦马达的装配结构图;
22.图5是本公开一示例性实施方式提供的自动对焦马达的俯视图。
23.附图标记说明
24.10
’‑
固定部,20
’‑
运动部,30
’‑
滚珠排,10-第一基体,11-第一v型槽,20-第二基体,21-第二v型槽,22-方形槽,30-第一滚珠,40-第二滚珠,51-第一磁体,52-第二磁体,61-第一磁性件,62-第二磁性件,70-磁石,80-线圈,90-外壳。
具体实施方式
25.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
26.在本公开中,在未作相反说明的情况下,使用的方位词如“上、下、左、右”是根据图面方向定义的,“内、外”是针对相应零部件的本身轮廓而言的。本公开中所使用的术语如“第一、第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。此外,下面的
描述在涉及附图时,不同附图中的同一附图标记表示相同或相似的要素。
27.参照图2至图5,本公开提供一种自动对焦马达,用于驱动光学器件沿预设方向运动,光学器件可以为透镜,该预设方向可以为光轴方向或根据实际需求所指定的方向。该马达包括第一基体10和能够与第一基体10在预设方向上相对运动的第二基体20,光学器件可以安装于第一基体10或第二基体20,当光学器件安装于第一基体10时,用于投射影像的图像传感器可以设置于第二基体20,或者光学器件和图像传感器也可以相反设置,本公开实施例中,将以第一基体10运动、第二基体20固定,光学器件安装于第一基体10为例进行说明。其中,马达还包括接触设置在在第一基体10与第二基体20之间的至少两个沿预设方向排列的第一滚珠30和一个第二滚珠40,以及设置于第一基体和第二基体的磁吸组件,第二滚珠40与第一滚珠30设置在第二基体20的对侧,磁吸组件配置为使得第二基体20被朝向第一滚珠30的一侧磁吸。参照图2,多个第一滚珠30形成为一列,当第一基体10具有拔模角度而导致其对侧不能平行时,第二基体20可以贴设在该一排滚珠所构成的直线处,并沿该直线运动,而第二滚珠40可以在第二基体20运动时适应第一基体10与第二基体20之间空隙变化而进行上下滚动以支撑第二基体20。需要说明的是,图2仅是为了更清楚地表达拔模角度,而不代表零部件实际的比例尺寸,并且该图中以第一基体10具有拔模角度为例说明,可以理解的是,本公开实施例的方案同样适用于第二基体20具有拔模角度的情况。
28.通过上述技术方案,磁吸组件使得第二基体20可以保持贴紧第一滚珠30,多个第一滚珠30构成的滚珠列可以对第一基体10和第二基体20的相对运动提供导向,而设置在第一滚珠30对侧的第二滚珠40的数量为一个,该一个第二滚珠40可以适应于零部件的拔模角度滚动,可以对第二基体20提供支撑。本公开实施例中的第一滚珠30结合第二滚珠40的应用,可以很好地适用于第一基体10或第二基体20的对面为非平行面的情况,通过第一滚珠30支撑,第二滚珠40导向,保证了第二基体20的运动过程可以顺畅平稳,从而保证产品性能。
29.本公开实施例中,磁吸组件可以包括设置于第一基体10和第二基体20中的一者的多个磁体和设置于第一基体10和第二基体20中的另一者的与磁体一一对应多个的磁性件,磁体和磁性件配置为所产生的磁吸力能够使得第一基体10与第二基体20产生相对转动的趋势,这样,第二基体20会由于转动趋势的存在对第一滚珠30产生抵压,使得第二基体20在运动过程中可以紧靠第一滚珠30,进而保障运动过程稳定,从而改善光学成像效果。
30.参照图5,磁体可以包括第一磁体51和第二磁体52,磁性件可以包括第一磁性件61和第二磁性件62,第一磁体51与第二磁体52设置于马达的对侧且错开布置,需要说明的是,这里的错开布置指的是两个磁体的中心位置错开,即两个磁体与相应的磁性件产生的磁吸力方向不会共线。在图5的图面中,左下侧的第一磁体51和第一磁性件61会在偏左的位置处产生对第二基体20产生向下的磁吸力,右上侧的第二磁体52和第二磁性件62会在偏右的位置处对第二基体20产生向上的磁吸力,由于该两组磁吸件错开布置,因此,上侧和下侧产生的磁吸力也会错开,这会导致第二基体20产生逆时针旋转的趋势,又由于第一滚珠30的存在,因此第二基体20的转动趋势会使得第二基体20压紧第一滚珠30。
31.本公开实施例中,第一磁体51和第一磁性件61与第一滚珠30同侧设置,且第一磁体51和第一磁性件61产生的磁吸力设置成大于第二磁体52和第二磁性件62产生的磁吸力,这样,磁吸组件除可以产生使得第二基体20具有转动趋势外,还可以保证第二基体20正向
压在第一滚珠30上,以保证与第一滚珠30的接触更加紧密。
32.根据本公开的一种实施方式,马达的驱动方式可以为音圈驱动的方式,具体地,参照图3和图5,马达可以包括设置于第一基体10和第二基体20中的一者的磁石70和设置于第一基体10和第二基体20中的另一者的线圈80,线圈80在通电后能够与磁石70产生电磁感应,以驱动使得第一基体10与第二基体20相对运动,其中,磁石70可以配置为磁体。用于驱动第二基体20运动的磁石可以与前述的用于产生磁吸作用的磁体共用,以减轻第二基体20及马达总体重量,从而减小第二基体20运动时的驱动力需求。
33.参照图3和图5,为了较好地实现滚珠的支撑和导向效果,本公开实施例中,第一滚珠30和第二滚珠40可以设置在第二基体20的斜对角处,如在图5中,第一滚珠30设置在左下角,第二滚珠40设置在右上角,以在第二基体20的最远处进行支撑,保证支撑的稳定性及可靠性,进一步确保马达的工作性能。
34.本公开实施例中,第一滚珠30和第二滚珠40的外周包覆有润滑膜层,如可以包覆有润滑油。润滑膜层能够减小滚珠与第一基体10和第二基体20之间接触的摩擦力,从而可以减小第二基体20运动时的阻力,降低马达能耗。当通过上述磁吸组件使得第二基体20与第一滚珠30紧靠时,这会子增加第一滚珠30与第二基体20之间的摩擦阻力,通过设置润滑膜层即会抵消该阻力,从而既能保证第二基体20能够压紧滚珠运动,又不会为其运动过程增加阻力。
35.参照图5,第一基体10的侧壁可以形成有沿预设方向延伸的第一v型槽11,第二基体20的侧壁形成有沿预设方向延伸并与第一v型槽11开口相对的第二v型槽21,第一滚珠30接触设置在第一v型槽11和第二v型槽21之间。第一滚珠30的外轮廓面可以与该两个v型槽的侧壁相切,保证第一滚珠30可以紧固地设置在二者之间,使得第一滚珠30具有良好的导向作用,避免第二基体20运动时产生晃动而影响成像效果。
36.继续参照图5,第一基体10或第二基体20的侧壁可以形成有沿预设方向延伸的方形槽22,第二滚珠40接触设置在方形槽22和与方形槽22相对的侧壁之间。在第二基体20运动时,第二滚珠40可以在该方形槽22内进行滚动,以对第二基体20起到支撑的效果。
37.根据本公开的第二个方面,还提供一种摄像模组,该摄像模组包括光学器件和上述的自动对焦马达。该摄像模组具有上述自动对焦马达的所有有益效果,这里不再赘述。
38.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
39.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
40.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。