1.本实用新型涉及机械手设备领域,更具体的说是液压机械手视频图像反馈连接机构。
背景技术:
2.机械手主要由执行机构、驱动机构和控制系统三大部分组成,手部是用来抓持工件的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等,机械手所用的驱动机构主要有四种:液压驱动、气压驱动、电气驱动和机械驱动,由于液压机械手具有结构紧凑、动作平稳、耐冲击、耐震动、防爆性好等特性,故应用十分广泛,但现有技术中不便于将显示视频图像的显示器与液压机械手进行连接。
技术实现要素:
3.本实用新型提供液压机械手视频图像反馈连接机构,其有益效果为便于将显示视频图像的显示器与液压机械手进行连接。
4.液压机械手视频图像反馈连接机构,包括连接座、滑动架、夹持部ⅰ和夹持部ⅱ,滑动架滑动连接在连接座上,夹持部ⅱ安装在滑动架上,夹持部ⅰ滑动连接在夹持部ⅱ上。
5.液压机械手视频图像反馈连接机构,还包括拉簧,夹持部ⅰ和夹持部ⅱ之间设置有两个拉簧。
6.液压机械手视频图像反馈连接机构,还包括连接架和滑块,连接架固接在滑动架上,滑块滑动连接在连接架上,夹持部ⅱ安装在滑块上。
7.液压机械手视频图像反馈连接机构,还包括磁石和固定板,连接座上设置有两个磁石,固定板设置在滑动架上,两个磁石能够对固定板进行吸附,两个磁石能够对连接架进行吸附。
8.液压机械手视频图像反馈连接机构,还包括胶条,连接架与滑块滑动连接处设置有胶条。
附图说明
9.下面结合附图和具体实施方法对本实用新型做进一步详细的说明。
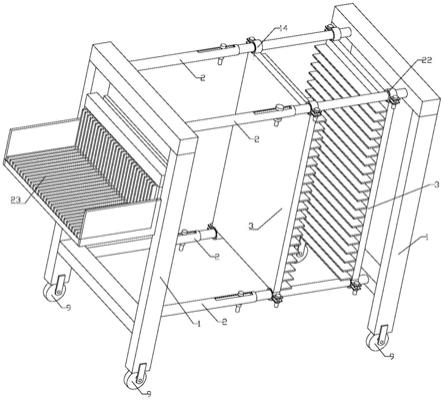
10.图1为液压机械手视频图像反馈连接机构的整体结构示意图一;
11.图2为液压机械手视频图像反馈连接机构的整体结构示意图二;
12.图3为底板的结构示意图;
13.图4为滑动架的结构示意图;
14.图5为夹持部ⅱ的结构示意图;
15.图6为夹持部ⅰ的结构示意图;
16.图7为滑块的结构示意图。
具体实施方式
17.参看图1-7,示出了按照本实用新型中便于将显示视频图像的显示器与机械手进行连接的实施例的示意图,进一步地,
18.本装置中包括连接座101、滑动架201、夹持部ⅱ302和夹持部ⅰ301,连接座101上滑动连接有滑动架201,滑动架201上安装有夹持部ⅱ302,夹持部
ⅱꢀ
302上滑动连接有夹持部ⅰ301。
19.工作人员将液压机械手连接在连接座101上,随后将显示器放置在夹持部ⅱ302和夹持部ⅰ301中间,使得夹持部ⅱ302和夹持部ⅰ301与显示器两端接触,从而对显示器进行夹持,同时将液压机械手与被夹持的显示器进行连接,进而使得工作人员能够从显示器中观察到机械手的视频图像,进而便于进行编写程序或检测数据,在将显示器进行夹持并将显示器与液压机械手进行连接后,工作人员可通过操作滑动架201在连接座101上滑出,从而调节显示器与液压机械手之间的距离,从而防止在液压机械手工作过程中,出现与显示器碰撞的情况,从而保护显示器,在液压机械手完成工作后,工作人员可将滑动架201 滑回连接座101中心位置,从而使得在不需使用滑动架201时滑动架201不会占用连接座101两侧的空间,进而达到节省空间的目的。
20.参看图5,示出了按照本实用新型中便于对显示器进行夹持的实施例的示意图,进一步地,
21.本实用新型中两个拉簧303的一端均固定连接在夹持部ⅰ301上,两个拉簧 303的另一端固定连接在夹持部ⅱ302上。
22.在工作人员将待连接显示器放置在夹持部ⅰ301和夹持部ⅱ302之间前,工作人员先拉动夹持部ⅰ301,从而使得夹持部ⅰ301与夹持部ⅱ302之间拉开一定空间,进而便于显示器的安放,当工作人员将显示器放置在夹持部ⅰ301和夹持部ⅱ302之间后,撤去拉动夹持部ⅰ301的力,从而使得夹持部ⅱ302受到两个拉簧303给的拉力从而使得夹持部ⅰ301和夹持部ⅱ302对显示器完成夹持操作,进而便于工作人员观看。
23.参看图2、图4、图5,示出了按照本实用新型中便于调节显示器高度的实施例的示意图,进一步地,
24.本实用新型中滑动架201上固定连接有连接架203,连接架203上滑动连接有滑块401,滑块401上安装有夹持部ⅱ302。
25.工作人员能够通过操作滑块401在连接架203上滑动,从而调节滑块401 的高度,滑块401的高度发生改变从而使得被夹持部ⅱ302和夹持部ⅰ301夹持的显示器高度发生改变,进而便于工作人员根据自身需求调节显示器高度至自身舒适位置,进而便于工作人员进行观看。
26.参看图3-4,示出了按照本实用新型中便于对滑动架201进行固定的实施例的示意图,进一步地,
27.本实用新型中两个磁石103均设置在连接座101上,固定板205与连接架 203均为铁质,固定板205能够被两个磁石103吸附,连接架203能够被两个磁石103吸附。
28.工作人员将滑动架201在连接座101上滑出,从而调节显示器与液压机械手之间的距离时,固定板205能够被两个磁石103吸附,从而对滑出的滑动架201进行固定,当工作人员将滑动架201滑回后,连接架203与两个磁石103接触,从而被两个磁石103进行吸附,从而
对滑回后的滑动架201进行固定。
29.参看图4,示出了按照本实用新型中便于对滑块401进行固定的实施例的示意图,进一步地,
30.本实用新型中滑块401与连接架203滑动连接处设置有胶条204。
31.胶条204能够增大滑动摩擦力,从而使得滑块401能滑动到连接架203任意位置进行固定,从而便于工作人员观看显示器。
32.参看图5、图7,示出了按照本实用新型中便于工作人员竖屏观看显示器的实施例的示意图,进一步地,
33.本实用新型中滑块401上转动连接有夹持部ⅱ302,多个磁块402均设置在滑块401上,磁块402能够对夹持部ⅱ302吸附。
34.在夹持部ⅱ302处于水平姿态时,位于滑块401上前后方向的两个磁块402 能够对夹持部ⅱ302吸附,从而对夹持部ⅱ302进行固定,进而便于工作人员横屏观看显示器,当需要竖屏观看时,工作人员可对夹持部ⅱ302施加外力,从而使得夹持部ⅱ302转动,将夹持部ⅱ302转动至竖直状态后,位于滑块401上竖直方向的两个磁块402能够对夹持部ⅱ302吸附,从而对夹持部ⅱ302进行固定,进而便于工作人员竖屏观看显示器。
35.参看图7,示出了按照本实用新型中便于滑动滑块401的实施例的示意图,进一步地,
36.本实用新型中调节把手403设置在滑块401上。
37.工作人员能够通过手持调节把手403,从而驱动滑块401上下滑动,进而便于调节显示器高度。
38.参看图5-6,示出了按照本实用新型中驱动夹持部ⅱ302转动的实施例的示意图,进一步地,
39.本实用新型中转动把手ⅱ304设置在夹持部ⅱ302上,转动把手ⅰ305设置在夹持部ⅰ301上。
40.工作人员可手持转动把手ⅱ304和转动把手ⅰ305,从而改变夹持部ⅱ302 和夹持部ⅰ301位置,进而便于调节显示器为竖直或水平姿态。
41.参看图4,示出了按照本实用新型中便于滑动滑动架201的实施例的示意图,进一步地,
42.本实用新型中拉动把手202设置在滑动架201上。
43.工作人员能够通过拉动拉动把手202从而驱动滑动架201滑动,拉动把手202的设置能够降低工作人员操作难度。
44.参看图3,示出了按照本实用新型中便于对机械手进行支撑的实施例的示意图,进一步地,
45.本实用新型中连接座101下方固定连接有两个支撑板102,两个支撑板102 下方固定连接有底板104。
46.底板104和支撑板102的设置能够将机械手垫起一定高度,从而便于工作人员对机械手底部的线路的连接。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。