用于在阀门处捕获流体的系统和方法
1.相关申请的交叉引用
2.根据美国法典第35篇第119条第e款(35 u.s.c.
§
119(e))的规定,本技术要求2019年9月6日提交的名为“用于在阀门处捕获流体的系统和方法(system and method for trapping fluid at a valve)”的美国临时申请no.62/897,023和2020年6月18日提交的名为“用于在阀门处捕获流体的系统和方法(system and method for trapping fluid at a valve)”的美国临时申请no.63/040,768的权益。美国临时申请no.62/897,023和no.63/040,768被通过引用全部结合于此。
背景技术:
3.电感耦合等离子体(icp)光谱法是一种分析技术,其通常用于测定液体样品中的痕量元素浓度和同位素比值。icp光谱法采用电磁生成的部分电离的氩等离子体,其温度达到约7,000k。当样品被引入该等离子体时,高温会导致样品原子电离或发光。由于每种化学元素都产生特征质量或发射光谱,因此测量发射质量或光的光谱允许确定原始样品的元素组成。
4.样品引入系统可用于将液体样品引入到icp光谱仪(例如,电感耦合等离子体质谱仪(icp/icp-ms)、电感耦合等离子体原子发射光谱仪(icp-aes)等)中进行分析。例如,样品引入系统可从容器中取出液体样品的等分试样,然后将该等分试样输送到喷雾器,该喷雾器将该等分试样转化为适于通过icp光谱仪在等离子体中进行电离的多分散气溶胶。然后将气溶胶在喷雾室中进行分类以去除较大的气溶胶颗粒。一旦离开该喷雾室,气溶胶就被通过icp-ms或icp-aes仪器的等离子炬组件引入到等离子体中进行分析。
技术实现要素:
5.描述了用于在引入到分析系统(例如经由icp-ms的样品分析)之前在阀门处分离样品的系统和方法。系统实施例可以包括但不限于阀门系统,该阀门系统包括与样品储存器流体连通的第一阀门和被配置成允许和阻断真空源到第一阀门的通路的第二阀门;传感器系统,其被配置成检测第一阀门处是否存在流体;以及控制器,其被配置成控制第二阀门的操作以一旦在第一阀门处检测到流体就阻断真空源到第一阀门的通路,以分离样品储存器内的流体。
6.提供本发明内容以便以简化形式引入概念选择,这些概念将在下面的详细描述中予以进一步描述。本发明内容并非旨在识别所要求保护的主题的关键特征或基本特征,也并非旨在用作确定所要求保护的主题的范围的帮助。
附图说明
7.参考附图描述了该详细说明。
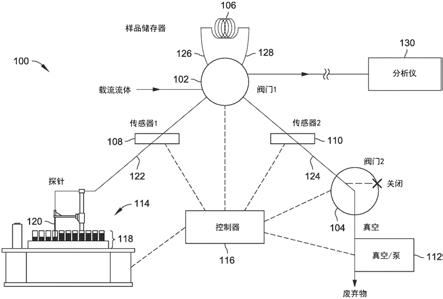
8.图1是根据本公开的示例性实施方案的用于在分析之前在喷射阀处分离样品的系统的示意图。
9.图2a是图1的系统开始从样品容器提采样品以传输到喷射阀的示意图。
10.图2b是图2a的系统的示意图,其中,样品到达喷射阀的第二传感器。
11.图2c是图2b的系统的示意图,其中,在真空源与喷射阀之间具有第二阀门关闭通路以分离样品储存器内的样品。
12.图2d是根据本公开的示例性实施方案的用于在分析之前在喷射阀处分离样品的系统的图解说明。
13.图3a是图1的系统的图解说明,其中,在先前提取的样品的分析期间通过自动采样器探针提取冲洗流体。
14.图3b是图3a的系统的示意图,其中,冲洗流体被保持在自动采样器探针中。
15.图3c是图3b的系统的示意图,其中,样品流体被通过自动采样器探针提取,冲洗流体和样品流体被朝向喷射阀引导。
16.图3d是图3a的系统的示意图,其中,冲洗流体被保持在自动采样器探针中,自动采样器探针被保持在第二冲洗流体容器的上方。
17.图3e是图3a的系统的示意图,其中,冲洗流体被保持在自动采样器探针中,第二冲洗流体被通过自动采样器探针提取,冲洗流体和第二冲洗流体被朝向喷射阀引导。
18.图4是自动采样器的被引入到包含样品的样品容器的样品探针的示意图,其中,样品探针将气体保持在样品探针内。
具体实施方案
19.概览
20.样品引入系统可用于将液体样品例如经由电感耦合等离子体(icp)光谱仪引入分析仪以进行分析。例如,泵系统、阀门系统和自动采样系统可以将样品从样品源(例如,样品瓶)通过一个或多个阀门输送到雾化器中,以便随后通过icp光谱仪进行化学成分分析。当通过这种样品引入系统处理多个样品时,系统的处理能力可能受到许多因素的限制,例如样品通过系统的流体管线的传输速率、系统识别哪个样品已被通过自动采样系统引入到该系统中的能力、系统跟踪将哪个样品引入到icp光谱仪的能力等。例如,可以在微量滴定盘中提供生物样品以进行分析,这种盘可以包括数百个容纳有样品的孔(例如,384孔微量滴定板等)。通过处理数百个样品中的每一个的过程,样品处理的低效率或分析这种样品的处理能力的限制变得复杂,从而导致与处理样品相关的大量潜在的时间和金钱成本。
21.阀门喷射系统可用于从样品容器中快速移动样品的等分试样并将其装载到阀门处的储存器中。储存器可以是其尺寸或容积与从样品容器通向阀门的管子相似一段管路。为了加快样品装载,泵系统(例如,真空泵、注射泵等)可以快速地将样品从样品容器中(例如,经由样品容器内的样品探针)拉入到储存器中。然而,样品的这种快速装载对微量样品的高处理能力分析提出了质疑。例如,被保持在样品容器中的整个样品可能在样品从样品容器到储存器的快速装载期间被消耗掉或被传递到分析仪。如果样品的分析结果有问题,或者如果实验室另外需要重新分析样品以验证结果,则来自样品容器的样品的消耗将会需要耗时的重新制备样品以进行验证分析。此外,这种系统可利用基本的时序考虑来决定何时移动自动采样器或吸收样品,而在这种时序考虑下,实验室情况可能会对样品分析产生负面影响。例如,如果样品中引入了异物(例如,过滤纤维、沉积物、碎屑等),或者异物与样
品探针相互作用,或者如果系统管道发生改变(例如,系统管道发生弯曲或扭结),则通过该系统的流体的流速会减慢或以其他方式改变,从而导致时间受到负面影响(例如,样品吸收减少、分析不准确等)。
22.因此,一方面,本公开涉及一种高样品处理能力的系统,以从样品容器中分离出精确量的样品,从而将样品消耗量降至最低程度并允许在样品容器中剩余足够的样品,以允许在需要时进行再分析。例如,该系统可以包括与真空源流体连通的喷射阀,以将样品提取到喷射阀处的样品储存器中。该系统包括一个或多个传感器以检测阀门处是否存在样品,在阀门处,一个或多个传感器的输出可用于控制真空源的操作或真空源到喷射阀的流体通路,以防止一旦在喷射阀处检测到样品就将额外的样品提取到喷射阀中。一方面,该系统包括与喷射阀流体连通的第二阀门,以控制或切断施加到喷射阀的真空并改变从样品容器到喷射阀的样品流动。例如,当一个或多个传感器检测到在喷射阀处存在样品时,第二阀门停止来自样品容器的样品的流动,以在样品容器内保留一定容积的样品流体用于再分析。一方面,该系统包括真空源,该真空源结合有阀门,当一个或多个传感器检测到在喷射阀处存在样品时,一旦停用真空源,该阀门就关闭。一个或多个传感器的使用因此考虑到了实际采样状况,这与仅依赖于估计时序或标准时间协议形成对照。作为选择或附加地,一个或多个传感器的输出可用于例如通过一旦在喷射阀处检测到样品就相对于样品容器提起样品探针,来控制用于获得样品的样品探针的定位或取向。
23.示例性实施方案
24.主要参考图1至图4,系统100被示出为用于在引入到分析系统之前在阀门处分离样品。系统100主要包括具有流体流动控制器的流动路径,该流体流动控制器有助于控制施加到与流体储存器流体连通的流体管线的真空,其中,控制器利用传感器输出来确定何时在流体储存器中存在样品或其他流体。图1中所示的系统100包括阀门系统(示出了阀门102和104)、样品储存器106、传感器系统(示出了传感器108和110)、真空源112、自动采样器114和控制器116。自动采样器114从多个样品源118通过经由阀门102和104与自动采样器114流体连通的真空源112的操作引入样品。例如,真空源112可以包括但不限于注射泵、蠕动泵、活塞泵、真空装置等以通过系统100提取流体。自动采样器114包括样品探针120以在多个样品源118的各个样品源之间移动(例如,根据预编程的采样协议)以经由传输管线122将多个样品引入到阀门102。多个样品源118可包括但不限于具有小样品容积(例如,小于一毫升的容积容量)的样品容器,例如(例如,容积为约150μl的)微量滴定孔、样品瓶或其他容器。阀门102将样品、冲洗流体或从自动采样器114接收到的其他流体经由传输管线122引导到样品储存器106中。
25.样品储存器106的尺寸和大小被设计为保持精确且已知量的流体(例如,其具有可用于分析物浓度测定的容积)并且可以包括但不限于管道的蜷曲配置、蛇形管配置、线性管配置、不规则管配置、其组合等。在实施方案中,样品储存器106具有小于约一毫升(1ml)的容积以便于由系统100处理微量样品。例如,样品储存器106可以具有50μl、100μl、150μl、200μl、250μl、300μl、350μl、400μl、450μl、500μl、550μl、600μl、650μl、700μl、750μl、800μl、850μl、900μl、950μl的容积或约5μl至1000μl的容积。样品储存器106的容积可以是待由系统100分析的单个样品的容积的至少一半,使得可从单个样品容器118提取至少两个单独容积的样品并通过系统100传输以填充样品储存器106(例如,如果需要,则提供可用于再分
析的足够的样品)。在实施方案中,样品储存器106包括入口126和出口128,入口126和出口128各自(例如,经由阀门102的两个端口)联接到阀门102,使得阀门102的流体流动配置管理流体流入和流出样品储存器106的流动。作为选择或附加地,阀门102限定形成样品储存器106的至少一部分的流体流动通道(例如,在阀门定子部分中)。阀门102被配置为在阀门取向之间进行切换以在样品储存器106与阀门104之间或在样品储存器106与分析仪130(例如,tcp光谱仪)之间提供流体连通,以允许将被保持在样品储存器106中的流体(例如,经由通过阀门102和样品储存器106引入载流流体以从其中推动流体,如图1所示)传输到分析仪130或其样品制备系统。
26.控制器116可操作地联接到系统100的部件以便于下列的协调:将样品、冲洗流体或其他流体提取到样品储存器106中、停止从自动采样器114提采样品、冲洗流体或其他流体以及引入被保持在样品储存器106中的流体用于喷射到分析仪中。例如,控制器116可基于从传感器108、传感器110和分析仪中的一个或多个接收到的信号来控制自动采样器114、阀门102、阀门104、真空源112和分析仪中的一个或多个的操作。作为选择或附加地,自动采样器114、阀门102、阀门104、真空源112和分析仪可包括具有在系统100的部件之间协调的功能的本地控制器。
27.参考图2a到图2c描述该系统100的示例样品传输实施方案。如图2a所示,真空源112经由阀门104、阀门102和样品储存器106与自动采样器114的探针120流体连通。探针120被引入到样品容器118并且真空源112向联接在阀门104与阀门102之间的流体管线124施加真空,以将样品从样品容器118提取到传输管线122中。作为选择,真空源112可被定位在传感器110与阀门104之间,其中,阀门104可在操作期间控制真空源112到流体出口的通路以向流体管线124提供真空。传感器108被定位在传输管线122的附近或周围以检测在传输管线122内是否存在流体。例如,通过传输管线122传输的样品的前缘由传感器108进行检测并且相应地生成感测信号。传感器系统可以采用一个或多个光学传感器、压力传感器、超声换能器、电导率传感器或其他传感器及其组合来检测在传输管线122、流体管线124或该系统100的其他部分内是否存在流体。在实施方案中,传感器108将感测信号传送到控制器116以指示在传输管线122内存在样品。参考图2b,样品被进一步提取通过传输管线122并被经由阀门102引导到样品储存器106中。
28.参考图2c,一旦填充样品储存器106,阀门102就进一步将样品从样品储存器106引导到流体管线124中。传感器110被定位在流体管线124的附近或周围以检测当流体离开阀门102时,在流体管线124内是否存在流体。例如,从阀门102传输出并传输到流体管线124中的样品的前缘由传感器110进行检测并且相应地生成感测信号。在实施方案中,传感器110将感测信号传送到控制器116以指示流体管线124内存在样品。在实施方案中,自动采样器114与传感器110之间的流体管线的容积小于在自动采样器114处存在的多个样品容器118中的一个样品容器的容积的一半,使得可以从单个样品容器中提取至少两个容积的样品并将其通过系统100进行传输以填充该样品储存器106。
29.在实施方案中,当传感器110在流体管线124中检测到样品的存在时,所获得的感测信号致使控制器116或其他控制装置改变阀门104的流动路径配置以控制或切断由真空源112施加的真空。阀门102可包括可(例如,在控制器116、本地控制器或其组合的控制下)在多个位置之间切换的旋转阀门。例如,阀门104被从(例如,图2a和2b中所示的)第一流动
配置转变到(例如,图2c中所示的)阻断流动配置,在第一流动配置中,流动路径在样品探针120与真空源112之间延伸(例如,经由传输管线122、阀门102、样品储存器106、流体管线124和阀门104),该阻断流动配置用以阻止真空源112的动作影响流体管线124、样品储存器106或传输管线122内的样品。当阀门104处于阻断流动配置中时,样品探针120不再从样品容器118提取样品。因此,系统100通过基本上在利用传感器系统检测到流体存在的同时在阀门102处捕获流体来控制从样品容器118移除的流体量。传感器系统考虑到了系统100在操作期间的实际状况(包括通过系统100的流体的实时流动状况),这因此可以适当地在阀门102处捕获精确量的流体(例如,样品储存器106的整个容积),而并不依赖于从样品容器提取到的流体之间的估计流速或预设时序操作在阀门102处切换流动配置以在样品储存器106处捕获流体。例如,如果系统100的流体流动相对于理想的流动状况发生变化,例如如果样品中引入了异物(例如,过滤纤维、沉积物、碎屑等),或者如果异物与样品探针相互作用,或者如果系统管道发生变化(例如,系统管道弯曲或扭结)时,系统100通过利用传感器系统在阀门102于流动配置之间进行切换以捕获样品储存器106内的流体时触发来调整流速的降低。如果仅使用预设时序操作,则存在降低的流速将无法在样品提取的预设时序限制流动之前提供足够的流体来填充样品储存器106的风险,这可能导致样品吸收减少(例如,样品储存器106填充不足)、分析不准确(例如,基于样品储存器106中存在的未知容积的样品),或对样品分析造成其他损害。
30.在图2d所示的系统100的实施方案中,系统100通过控制器116对真空源112的控制来控制向流体管线124施加真空。例如,在一方面,真空源112可包括被配置为停止生成真空的泵(例如,活塞泵),用以一旦(例如,经由从传感器110生成的感测信号)检测到样品储存器内的样品就在从控制器116接收到控制信号之后停止向流体管线124施加真空。在一方面,真空源112包括作为真空源112的部件的阀门(例如,阀门104),其中,控制器116对真空源112的控制影响真空源112内的阀门的操作。例如,真空源112内的阀门可以是止回阀、电磁阀、夹管阀或一旦停止流体通过真空源112的流动、一旦真空源112断电等就偏置到关闭位置以防止真空源112通向流体出口的其他阀门。在这种配置中,当控制器116允许真空源112操作时,阀门允许流体流过真空源112,并且当控制器116停止真空源112的操作时(例如,一旦检测到样品储存器106内的样品),阀门就停止流体流过真空源112。
31.在实施方案中,控制器116或其他控制装置在传感器系统在阀门102处检测到样品或其他流体时控制自动采样器114的操作以从样品容器118移除探针120,另外或作为替代以控制真空源112的操作或控制真空源112与探针120之间的流体耦合。例如,当将探针120从样品容器118中移除时,系统100防止额外的样品被引入到阀门102,即使仍然将真空施加到传输管线124(例如如果在真空中断和施加到传输管线124的真空不足之间出现时滞),也是如此。如果在将探针120从样品容器118中移除的同时仍将真空施加到传输管线124,则将环境气体改为引入到传输管线124。在实施方案中,当基于传感器系统对阀门102处的流体进行的检测,将探针120缩回或以其他方式从样品容器118移除时,从系统100中省略掉阀门104。
32.如本文所述,对真空源112、探针120及其组合的精确控制可以减少从样品容器118提取的流体量,以便填充样品储存器106,这可以在从样品容器118中移除流体之后将样品保存在样品容器118中用于随后的再分析。对于小容积的样品容器118或存在于样品容器
118中的少量流体,如果移除太多的流体以保证填充好的样品储存器106,例如如果在切换阀门102之前大量流体流过传感器110(例如可能是预设时序配置的情况),那么在样品的分析结果有问题的情况下,或者在实验室另外需要对样品进行再分析来验证结果的情况下,样品储存器106外部的样品被浪费掉且不能用于再分析。
33.与传统的采样程序相比,系统100可在阀门102处捕获冲洗流体以促进样品之间的快速清洁方案并减少所需的冲洗流体量。例如,参考图3a和图3e,在系统100的清洁方案期间,一种或多种冲洗流体可被通过系统100进行传输。图3a示出了系统100将冲洗流体通过(例如,与真空源112流体连通的)自动采样器114的操作从冲洗容器300引入到探针120中。冲洗流体引入到探针120可以在对由探针120提取的前一个样品进行分析期间发生。系统100然后(例如,通过将阀门104切换到阻断配置)阻断施加到传输管线122的真空以将冲洗流体捕获在探针120内。在实施方案中,传感器108检测传输管线122中的冲洗流体的存在并且将阀门104触发到阻断配置。自动采样器114然后从冲洗容器300中取出探针120,从而保持住探针120内的冲洗流体。在实施方案中,自动采样器114将探针120移动到位于下一个待在多个样品容器118内进行分析的样品的上方的位置(例如,如图3b所示)。通过将容纳有冲洗流体的探针120预先放置在下一个待分析的样品上方,系统100节省了在分析前一个样品之后冲洗和移动探针120所需的传输时间,从而在分析之后,在同样清洗传输管线122、样品储存器106等的同时允许将下一个样品立即提取到系统100中。然后,系统100可以取出下一个待分析的样品并将该样品传输至本文所述的样品储存器106。被捕获在探针120中的冲洗流体将先于传输管线122内的样品,在样品通过之前冲洗传输管线122和系统100的其他部分(例如,如图3c所示)。在实施方案中,额外的冲洗流体可以在提取下一个样品进行分析之前被提取到系统中,例如用于需要多种冲洗流体(例如,用以移除生物成分的第一冲洗流体,然后是用以去除金属成分的第二冲洗流体,第一基础ph冲洗流体,然后是第二酸性ph冲洗流体,第一酸性ph冲洗流体,然后是第二水冲洗流体等)的样品程序。例如,图3d示出了探针120,其被定位在容纳有第二冲洗流体的另一冲洗容器300a的上方,其中,探针120容纳有从冲洗容器300取出的被捕获在探针120内的冲洗流体(例如,如参照图3a和图3b所述)。将第一冲洗流体引入到探针120中可在对前一个样品进行的分析期间发生,该前一个样品由探针120提取,由样品储存器106捕获并被传输到与阀门102流体连通的分析系统。自动采样器114移动探针120到冲洗容器300a的上方或在冲洗容器300a处,使得当对前一个样品进行的分析完成时,系统100然后可(例如,通过将阀门104改变为第一流动配置以允许真空将第二冲洗流体提取到探针120中,如图3e所示)从冲洗容器300a取出第二冲洗流体。通过将容纳有冲洗流体的探针120预先定位在待分析的冲洗容器300a的上方,系统100节省了在对前一个样品进行分析之后在两个冲洗容器之间传输所需的传输时间,从而允许在分析之后,立即将两种冲洗流体提取到系统100中,从而提供了样品分析的更高处理量。
34.系统100还可有助于防止在将探针120引入到流体容器(例如,样品容器118、冲洗容器300或300a等)时对流体进行预采样。例如,参考图4,探针120被示出为被引入到样品容器118。在将探针120引入到样品容器118之前,系统100例如通过真空源112的作用将气体(例如,环境空气)提取到探针120中,然后例如通过如本文所述的真空的阻断作用将气体捕获在探针120内。自动采样器114可然后将探针120引入到样品容器118。探针120内的气体防止下一个样品被提取到传输管线122中,直到真空源112(例如,通过将阀门104转变到第一
流动配置)与探针120流体连通。例如,在连续样品之间不使用冲洗程序的情况下,可以使用这种预采样预防措施。一旦将样品提取到系统100中,探针120就可被从样品容器118中移除以在探针120中提取和捕获空气。自动采样器114可以然后在对前一个样品进行的分析期间移动到待分析的下一个样品并且将探针120引入到下一样品容器118中。然后,在对前一个样品进行分析之后立即准备就绪以对下一个样品进行采样,从而避免需要将探针120传输到下一个样品位置,同时防止浪费样品容器118内的液体。
35.在实施方案中,系统100保持真空源112上的功率以将真空源的泵送速度保持在用于从样品容器118取出样品的速度,甚至是在阀门104处于关闭位置中(例如,从而防止流体进入或离开真空源112)时也是如此。当将探针120定位于下一个样品处或以其他方式处于准备状态以取出样品或其他流体时,阀门104被转换到打开位置以立即允许真空源112将真空施加到流体管线124,以移动流体通过阀门102。
36.在实施方案中,与传统的样品处理程序相比,系统100可将在示例样品方法中处理样品所花费的时间平均减少了约5秒到约10秒。对于处理数百个样品的实验室设施,系统100可在给定的一天中将处理能力提高数小时。
37.系统100可以通过控制器116的操作自动管理将样品从多个样品源118引入到样品储存器106并随后引入到分析仪,控制器116可以是具有处理器和存储器的计算装置的一部分。处理器为计算装置提供处理功能并且可以包括任意数量的处理器、微控制器、控制器116或其他处理系统以及用于存储由计算装置访问或生成的数据和其他信息的常驻或外部存储器。处理器可以执行实施本文所述的技术的一个或多个软件程序。处理器不受形成它的材料或其中采用的处理结构的限制,因此,可以经由一个或多个半导体和/或晶体管(例如,电子集成电路(ic))等来实现。
38.结论
39.尽管已经以特定于结构特征和/或过程操作的语言描述了主题,但是应当理解,在所附权利要求中限定的主题不一定限于上述特定特征或动作。相反,上述具体特征和动作被公开为实施权利要求的示例形式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。