微反射镜阵列
1.相关申请的交叉引用
2.本技术要求于2019年8月19日提交的ep申请19192294.7和于2019年9月26日提交的ep申请19199722.0的优先权,这些申请通过引用被整体并入本文中。
技术领域
3.本发明涉及微反射镜阵列、包括这种微反射镜阵列的可编程照射器、包括这种可编程照射器的光刻设备、包括这种可编程照射器的检查设备以及用于形成这种微反射镜阵列的方法。
背景技术:
4.光刻设备是被构造为将所期望的图案施加到衬底上的机器。光刻设备可以用在例如集成电路(ic)的制造中。光刻设备例如可以将图案形成装置处的图案投影到被设置在衬底上的辐射敏感材料(抗蚀剂)层上。本文中使用的术语“图案形成装置”应被广义地解释为是指可以用于向入射辐射束赋予图案化横截面的装置,该图案化横截面对应于将在衬底的目标部分中创建的图案;在本文中也可以使用术语“光阀”。通常,图案将对应于在目标部分中创建的器件(诸如集成电路或其它器件)中的特定功能层。这种图案形成装置的示例包括:
[0005]-掩模(或掩模版)。掩模的概念在光刻中是公知的,它包括诸如二元、交替相移和衰减相移的掩模类型、以及各种混合掩模类型。根据掩模上的图案,这种掩模在辐射束中的放置引起撞击在掩模上的辐射的选择性透射(在透射掩模的情况下)或反射(在反射掩模的情况下)。掩模可以由诸如掩模台或掩模夹具的支撑结构支撑。该支撑结构确保掩模可以被保持在入射辐射束中的期望位置处,并且如果期望的话,掩模可以相对于束被移动;
[0006]-可编程反射镜阵列。这种装置的一个示例是具有粘弹性控制层和反射表面的矩阵可寻址表面。这种装置背后的基本原理是(例如)反射表面的寻址区域将入射光反射为衍射光,而未寻址区域将入射光反射为未衍射光。使用适当的滤光器,可以从反射光束中滤除未衍射光,只留下衍射光;以这种方式,光束根据矩阵可寻址表面的寻址图案而变得图案化。可编程反射镜阵列的备选实施例采用微小反射镜的矩阵排列,例如通过施加适当的局部电场,或通过采用静电或压电致动部件,微小反射镜中的每个微小反射镜可以围绕轴被单独倾斜。再一次,反射镜是矩阵可寻址的,使得被寻址的反射镜将在与未被寻址的反射镜不同的方向上反射入射辐射束;以这种方式,根据矩阵可寻址反射镜的寻址图案对反射束进行图案化。可以使用适当的电子部件来执行所需的矩阵寻址。在上述两种情况下,图案化部件可以包括一个或多个可编程反射镜阵列。例如,可以从美国专利us 5,296,891和us 5,523,193以及pct专利申请wo 98/38597和wo 98/33096中收集关于这里所提到的反射镜阵列的更多信息,这些专利通过引用被并入本文中。这种可编程反射镜阵列可以由支撑结构(诸如框架或工作台)支撑,例如,其可以根据需要被固定或可移动;以及
[0007]-可编程lcd阵列。在美国专利us 5,229,872中给出了这种构造的示例,该专利通
过应用被并入本文中。这种可编程lcd阵列可以由支撑结构(诸如框架或工作台)支撑,例如,其可以根据需要被固定或可移动。
[0008]
出于简化的目的,本文的其余部分可以在某些位置处具体地将其本身指向涉及掩模和掩模台的示例;然而,在这种情况下所讨论的一般原理应当在如上所阐述的图案形成装置的更广泛的上下文中看到。
[0009]
为了在衬底上投射图案,光刻设备可以使用电磁辐射。该辐射的波长决定了可以在衬底上形成的特征的最小尺寸。与使用例如波长为193nm的辐射的光刻设备相比,使用波长在4-20nm范围内(例如6.7nm或13.5nm)的极紫外(euv)辐射的光刻设备可以用于在衬底上形成更小的特征。
[0010]
除了辐射的波长(λ)和投影透镜的数值孔径(na)之外,照射源的形状(或更一般地,角强度分布)是实现光刻中的高分辨率的最重要参数之一。
[0011]
在光刻设备的照射系统中可以使用包括成百上千个微反射镜(以下通常简称为“反射镜”)的阵列的微反射镜阵列来控制光的横截面形状和强度分布。每个微反射镜反射光斑,并且改变微反射镜的角度改变了斑的位置,从而改变辐射束的形状。
[0012]
微机电系统(mems)技术可以用于制造和控制反射镜。例如,可以使用静电或压电mems系统来使反射镜转向。
[0013]
目前,存在用于对具有深紫外光谱(duv)中的波长(例如λ=193nm)的光进行成形的微反射镜阵列。然而,这些微反射镜阵列不能被有效地用于极紫外光谱(euv)中的光所需的较短波长,例如λ=13.5nm。需要新的微反射镜阵列技术以用于euv辐射。而且,需要针对这种新的微反射镜阵列技术的有利的新应用,以用于euv和/或非euv辐射,例如可见光或duv辐射。
技术实现要素:
[0014]
根据本发明的第一方面,提供了一种微反射镜阵列,其例如可以用于光刻设备或检查设备的照射系统中以调节辐射束。微反射镜阵列包括衬底和用于反射入射光的多个反射镜。针对多个反射镜中的每个反射镜,存在用于支撑反射镜的相应的柱,并且存在被连接到衬底的一个或多个静电致动器,该一个或多个静电致动器用于向柱施加力以使柱相对于衬底进行位移,并且由此使反射镜进行位移。反射镜可以通过柱从衬底被支撑,但是柱相对于衬底是可位移的。静电致动器可以直接作用在柱上,而不是作用在反射镜上,以根据需要倾倒和倾斜反射镜。
[0015]
在一种情况下,静电致动器可以被布置为沿基本在衬底平面中的对应方向(即“横向”)向柱施加力。在静态配置中,这可以在反射镜的前表面的平面中。
[0016]
静电致动器可以包括至少一对梳状致动器,或优选地两对梳状致动器,其中每个梳状致动器包括静态部分和移动部分,该静态部分被固定到衬底,该移动部分相对于衬底是可移动的并且被连接到柱,并且细长导体元件中的至少一个“梳状件”从静态部分延伸并且与作为移动部分的部分的细长导体元件的梳状件交错。通过向梳状致动器施加电压,移动部件拉动柱,使其偏转,由此使反射镜进行位移。具有围绕柱而布置的两对梳状致动器允许对反射镜的倾倒和倾斜(2d)位移控制。每个梳状致动器的移动部分可以被成形为梯形,并且可以在梯形的一些或全部角处被锚定到衬底。在梯形角处的锚定件可以向梳状致动器
提供柔性。针对给定的占用面积,具有四个梳状致动器,每个梳状致动器具有梯形形状,允许由静电致动器覆盖的表面积最大化。每个静电致动器可以通过一个或多个弹性元件(有回弹力的元件,例如具有细长形式)被连接到柱,该一个或多个弹性元件可以将力从致动器传递到柱,并且针对给定的力改善柱的偏转。弹性元件可以是薄的(例如1μm厚)硅带,其允许来自静电致动器的力被传递到柱。
[0017]
针对阵列中的每个反射镜,微反射镜阵列可以包括用于感测反射镜的位移的感测元件。感测元件可以用在位移控制反馈系统中,以调整被提供给静电致动器的电压,从而实现目标反射镜角度。感测元件可以包括来自反射镜的突起和被连接到衬底的电极,并且被布置为感测突起与电极之间的电容。电容是突起与电极之间的距离的函数,因此可以用于导出反射镜的位移。替代地或附加地,感测元件可以包括被耦合到柱的压电电阻器。例如,压电电阻器可以位于柱与散热器之间的柔性连接中的一个或多个柔性连接上。当柱被偏转时,压电电阻器受到应力,由此可测量地改变其电性能。可选地,可以提供温度传感器以测量压电电阻器的温度,并且感测元件工作以使用由传感器输出的温度值来补偿由于压电电阻器的偏转与电阻之间的关系的温度而引起的变化。
[0018]
针对阵列中的每个反射镜,微反射镜阵列可以包括用于对来自反射镜的热进行扩散的热扩散器。反射镜的过热可能妨碍对反射镜的位移控制和/或损坏下面的mems组件。这对于euv应用可能是特别的问题,因为入射光的短波长导致每个反射镜吸收更大的热功率。热扩散器可以通过对来自反射镜的热进行扩散来解决这个问题。热扩散器可以包括被连接到衬底的散热器和将散热器连接到支柱的多个柔性连接器。通常,微反射镜阵列用于在气体压力远小于一个大气压的环境中操作,实际上通常基本上在真空中操作,因此热对流基本上为零。代替地,热扩散器允许热被传导走,诸如被传导到衬底。注意,在柔性连接器的增加的柔性与热扩散器从反射镜传导热的增加的能力之间存在折衷。与传统的反射镜阵列相比,将致动力横向地(特别地,通过梳状致动器)施加给支柱允许将增加的力施加到柔性连接器,转而允许选择柔性连接器以提供改进的导热性。这允许本微反射镜阵列用于常规反射镜阵列不适合的应用中。
[0019]
阵列中的每个反射镜优选地适于反射波长约为13nm(诸如以大致13.5nm为中心的范围)的光,使得微反射镜阵列可以用于euv应用。
[0020]
根据本发明的第二方面,提供了一种可编程照射器,包括根据本发明第一方面的用于调节辐射束的微反射镜阵列。
[0021]
可编程照射器可以还包括位移控制反馈系统,该位移控制反馈系统被配置为针对微反射镜阵列中的每个反射镜确定反射镜的位置,并且基于所确定的位置和基于反射镜的预定目标位置来调整被施加给相关联的静电致动器的电压。
[0022]
根据本发明的第三方面,提供了一种光刻设备,该光刻设备被布置为将图案从图案形成装置投射到衬底上。光刻设备包括根据本发明的第二方面的可编程照射器,用于调节被用来照射图案形成装置的辐射束和/或用于调节被用来测量衬底上的目标结构的辐射束。可编程照射器中的微反射镜阵列可以用在光刻设备的照射系统中,以例如控制或调节被用来照射图案形成装置的光或辐射束的横截面形状和/或强度分布。替代地或附加地,可编程照射器中的微反射镜阵列可以分别用在光刻设备的对准系统和/或套刻测量系统中,以控制或调节光或辐射束的光谱和/或空间分布,该光或辐射束用于分别测量衬底上的对
准标记或目标结构的位置和/或执行对衬底上的标记或目标结构的套刻测量。
[0023]
根据本发明的第四方面,提供了一种检查设备,包括根据本发明的第二方面的可编程照射器,用于调节被用来测量衬底上的目标结构的辐射束。例如,可编程照射器中的微反射镜阵列可以用于控制或调节光或辐射束的光谱和/或空间分布,该光或辐射束由检查设备使用来测量衬底上的目标结构(例如标记),以便确定用于对准目的的目标结构的位置和/或以便执行套刻测量。
[0024]
根据本发明的第五方面,提供了一种形成微反射镜阵列的方法。该方法可以用于形成根据本发明的第一方面的微反射镜阵列。形成微反射镜阵列的方法包括:提供衬底,形成用于反射入射光的多个反射镜,并且针对阵列中的每个反射镜,形成支撑反射镜的相应的柱。该方法还包括,针对阵列中的每个反射镜,形成一个或多个静电致动器,该一个或多个静电致动器被连接到衬底,用于向柱施加力以使柱相对于衬底进行位移,由此使反射镜进行位移。
[0025]
形成所述一个或多个静电致动器的步骤可以包括:形成至少一对梳状致动器,并且优选地形成两对梳状致动器,该两对梳状致动器被布置为实现对反射镜的倾倒和倾斜位移控制,其中每个梳状致动器包括静态部分和移动部分,该静态部分被固定到衬底,该移动部分相对于衬底是可移动的并且被连接到柱。每个梳状致动器可以被成形为梯形,并且在梯形的一些或全部角处被锚定到衬底上。形成一个或多个静电致动器的步骤可以包括:形成一个或多个弹性元件,该一个或多个弹性元件将一个或多个静电致动器连接到柱。
[0026]
方法可以包括:针对多个反射镜中的每个反射镜,形成用于感测反射镜的位移的感测元件。形成感测元件的步骤可以包括:形成来自反射镜的突起和被连接到衬底的电极,并且该感测元件被布置为感测突起与电极之间的电容。或者,形成感测元件的步骤可以包括:形成被耦合到柱的压电电阻器。
[0027]
方法可以包括:针对阵列中的每个反射镜,形成用于对来自反射镜的热进行扩散的热扩散器。形成热扩散器的步骤可以包括:形成散热器和将散热器连接到柱的多个柔性连接器。
附图说明
[0028]
现在将参照所附示意图仅以示例的方式描述本发明的实施例,在附图中:
[0029]
图1描绘了包括具有(可编程)照射器和辐射源的光刻设备的光刻系统;
[0030]
图1a描绘了已知的检查设备;
[0031]
图1b描绘了用在图1a的检查设备中的可编程照射器。
[0032]
图2描绘了包括两对梳状致动器的微反射镜阵列的一部分;
[0033]
图3描绘了用于对微反射镜阵列中的反射镜进行位移的柱和弹性元件;
[0034]
图4a描绘了微反射镜阵列的一部分的顶视图;
[0035]
图4b描绘了另一微反射镜阵列的一部分的顶视图,该微反射镜阵列具有作为感测元件的一部分的突起;
[0036]
图5描绘了微反射镜阵列的镜和下面的mems系统的横截面;
[0037]
图6描绘了由多个晶片形成微反射镜阵列的方法;以及
[0038]
图7描绘了形成微反射镜阵列的备选方法,该方法包括hf气相蚀刻的步骤。
具体实施方式
[0039]
图1示出了包括辐射源so和光刻设备la的光刻系统。辐射源so被配置为生成euv辐射束b并且将euv辐射束b提供给光刻设备la。光刻设备la包括照射系统il、被配置为支撑图案形成装置ma的支撑结构或掩模台mt、投影系统ps和被配置为支撑衬底w的衬底台wt。
[0040]
照射系统il被配置为在euv辐射束b入射到图案形成装置ma上之前调节euv辐射束b。此外,照射系统il可以包括琢面场反射镜装置10和琢面光瞳反射镜装置11。照射系统il可以包括除了琢面场反射镜装置10和/或琢面光瞳反射镜装置11之外或代替琢面场反射镜装置10和/或琢面光瞳反射镜装置11的其它反射镜或装置。例如,除了如us 8,294,877 b2中所公开的琢面场反射镜装置10和琢面光瞳反射镜装置11之外,如本文所述的微反射镜阵列可以被添加到照射系统il中,该us 8,294,877 b2通过引用被整体并入本文中,或者可以被用来代替如us 10,254,654 b2中所公开的琢面场反射镜装置10和琢面光瞳反射镜装置11中的一个或两个,该us 10,254,654 b2通过引用被整体并入本文中。在这种情况下,照射系统il是可编程照射器il,该照射系统现在包括如本文所述的至少一个微反射镜阵列。这种可编程照射器il可以用于调节被用来照射图案形成装置的辐射束。例如,可编程照射器il可以用于通过向euv辐射束b提供所期望的横截面形状和/或所期望的强度分布来控制或调节euv辐射束b。
[0041]
在被如此调节之后,euv辐射束b照射图案形成装置ma并且与其相互作用。作为这种相互作用的结果,生成了图案化的euv辐射束b’。投影系统ps被配置为将图案化的euv辐射束b’投影到衬底w上。为此目的,投影系统ps可以包括多个反射镜13、14,多个反射镜13、14被配置为将图案化的euv辐射束b’投影到由衬底台wt保持的衬底w上。投影系统ps可以向图案化的euv辐射束b’施加缩减因子,从而形成具有比图案形成装置ma上的对应特征更小的特征的图像。例如,可以施加4或8的缩减系数。尽管在图1中投影系统ps被示为仅具有两个反射镜13、14,但是投影系统ps可以包括不同数目的反射镜(例如六个或八个反射镜)。
[0042]
衬底w可以包括先前形成的图案。在这种情况下,光刻设备la将由图案化的euv辐射束b’形成的图像与先前在衬底w上形成的图案对准。
[0043]
可以在辐射源so、照射系统il和/或投影系统ps中提供相对真空,即压力远低于大气压的少量气体(例如氢气)。
[0044]
辐射源so可以是激光产生的等离子体(lpp)源、放电产生的等离子体(dpp)源、自由电子激光器(fel)或能够生成euv辐射的任何其它辐射源。
[0045]
图1a示出了从us 9,946,167 b2中已知的一种检查设备,该us 9,946,167 b2通过引用被整体并入本文中。图1a对应于us 9,946,167 b2的图3a。检查设备是用于测量例如套刻和/或对准的暗场量测设备。
[0046]
在光刻工艺中,希望频繁地对所创建的结构进行测量,例如用于过程控制和验证。用于进行这种测量的各种工具是已知的,包括通常用于测量临界尺寸(cd)的扫描电子显微反射镜,以及用于测量套刻、装置中的两层的对准精度和对准(即衬底上的对准标记的位置)的专用工具。已经开发了各种形式的散射计用于光刻领域。这些装置将辐射束引导到目标结构(例如光栅或标记)上,并且测量散射辐射的一个或多个特性(例如作为波长的函数的在单个反射角处的强度);作为反射角的函数的一个或多个波长处的强度;或者作为反射角的函数的偏振,以获得“光谱”,根据该光谱可以确定目标的感兴趣性质。感兴趣性质的确
定可以通过各种技术来执行:例如,通过诸如严格耦合波分析或有限元方法的迭代方法来重构目标结构;文库搜索;以及主成分分析。
[0047]
图1a所示的暗场量测设备可以是独立的装置/系统,或者可以作为对准系统和/或作为套刻测量系统(未示出)被并入光刻设备la。在整个设备中具有若干分支的光轴由虚线o表示。在该设备中,由辐射源111(例如氙灯)发射的光通过包括透镜112、114和物镜116的光学系统经由分束器115被引导到衬底w上。这些透镜以4f排列的双序列进行布置。因此,可以通过在呈现衬底平面的空间光谱的平面(这里被称为(共轭)光瞳平面)中定义空间强度分布来选择辐射入射到衬底上的角度分布。特别地,这可以通过在作为物镜光瞳平面的背投图像的平面中在透镜112和114之间插入适当形式的孔径板113来实现。在所示的示例中,孔径板113具有不同的形式,被标记为113n和113s,允许选择不同的照射模式。本示例中的照射系统形成离轴照射模式。在第一照射模式中,孔径板113n从指定方向提供离轴,仅为了描述起见,指定方向为“北”。在第二照射模式中,孔径板113s用于提供类似的照射,但是来自相反的方向,被标记为“南”。通过使用不同的孔径,其他照射模式也是可能的。光瞳平面的其余部分期望是暗的,因为期望照射模式之外的任何不必要的光将干扰所期望的测量信号。
[0048]
衬底w上的目标结构(未示出)(例如光栅或标记)被放置为垂直于物镜116的光轴o。从偏离轴o的角度撞击到目标结构上的照射光线产生零级衍射光线和两个一级衍射光线。由于板113中的孔径具有有限的宽度(允许有用的光量所必需的),入射光线实际上将占据一定的角度范围,并且衍射光线0和 1/-1将稍微展开。根据小目标的点扩展函数,每个阶 1和-1将进一步在角度范围上扩展,而不是单个理想光线。注意,光栅间距和照射角度可以被设计或调整,使得进入物镜的一级光线与中心光轴紧密对准。
[0049]
由衬底w上的目标衍射的至少0级和 1级由物镜116收集并且通过分束器115被引导回来。通过指定被标记为北(n)和南(s)的直径上相对的孔径来说明第一照射模式和第二照射模式。当入射光线来自光轴的北侧时,即当使用孔径板113n来应用第一照射模式时,被标记为 1(n)的 1衍射光线进入物镜116。相反,当使用孔径板113s来应用第二照射模式时,-1衍射光线(被标记为-1(s))是进入透镜116的光线。
[0050]
第二分束器117将衍射束分成两个测量分支。在第一测量分支中,光学系统118使用零级衍射束和一级衍射束在第一传感器119(例如ccd或cmos传感器)上形成目标的衍射光谱(光瞳平面图像)。每个衍射级击中传感器上的不同点,使得图像处理能够比较和对比级。传感器119所捕获的光瞳平面图像可以用于使检查设备聚焦和/或使一级束的强度测量归一化。光瞳平面图像还可以用于许多测量目的,例如重构。
[0051]
在第二测量分支中,包括透镜120、122的光学系统在传感器123(例如ccd或cmos传感器)上形成衬底w上的目标的图像。在第二测量分支中,在与光瞳平面共轭的平面中提供被称为场阑121的孔径板。当描述本发明时,该平面将被称为“中间光瞳平面”。场阑121用于阻挡零级衍射束,使得在传感器123上形成的目标图像仅由-1或 1一级束形成。由传感器119和123捕获的图像被输出到图像处理器和控制器pu,其功能将取决于所执行的测量的特定类型。注意,这里所使用的术语“图像”是广义的。如果仅存在-1和 1阶中的一个,则将不形成该光栅线的图像。
[0052]
检查设备的照射系统包括照射器110。如图1a所示,该照射系统110包括透镜112和
孔径板113。检查设备的更多细节可以在us 9,946,167 b2中找到。
[0053]
图1b示出了用在图1a的检查设备中的可编程照射器140。该可编程照射器140可以代替照射器110来用在图1a的检查设备中。可编程照射器140包括根据本发明的微反射镜阵列133以及包括一对透镜的低na中继4f系统135。来自辐射源130(不是可编程照射器140的部分)(例如宽带辐射源或白光源)的辐射或光可以经由可选的光纤131和可选的准直透镜系统132被引导到微反射镜阵列133。处理单元pu可以通过以下方式控制微反射镜阵列133:微反射镜134(更精确地,微反射镜134中的反射镜,或微反射镜阵列133中的反射镜)被单独地倾斜。通过独立地调谐每个单独反射镜的倾斜角,可以控制由低na中继系统135输出的光的空间分布,并且可以根据需要进行各种照射模式,而不必使用孔径板。如果可编程照射器140被用在图1a的检查设备中,则它与透镜114配合,这意味着由低na中继系统135输出的光被图1a的透镜114接收。
[0054]
为了控制由低na中继系统135输出的光的光谱分布,反射镜中的至少部分可以包括在反射镜表面(未示出)的顶部上的光栅。针对所有反射镜,光栅可以是相同的,或者备选地,可以使用不同的光栅,例如具有不同间距的光栅。通过微反射镜阵列133的适当控制,由低na中继系统135输出的光包括单一波长或单一(窄)波长范围。然而,也可以通过以下方式控制微反射镜阵列133:由低na中继系统135输出的光包括多个不同波长或多个不同(窄)波长范围。光栅可以在反射镜表面上进行光刻图案化。具有光栅的每个反射镜根据相关联的光栅方程在不同方向上衍射不同波长的光。衍射光的部分被低na中继系统135捕获并且形成图像。通过独立地调谐每个反射镜的角度,可以在空间上和光谱上控制输出处的光分布,因为某(多个)衍射级将被低na中继系统135捕获,而其它(多个)衍射级将不被捕获。这种空间和光谱的光分布可以有利地用于例如照射和测量衬底上的套刻目标结构或用于测量衬底上的对准标记的位置。在本文中,术语“目标结构”、“目标”、“标记”、“标志”和“光栅”在上下文允许的地方是彼此的所有同义词。
[0055]
可以被低na中继系统135捕获的衍射束的光谱带宽是dλ=p.na,其中p是光栅的间距,na是低na中继系统135的数值孔径。在p=500nm和n=0.02的情况下,光谱带宽是10nm,这意味着光栅的衍射级包括10nm的波长范围或带。
[0056]
低na中继系统135的空间分辨率为~λ/na。在λ=850nm和na=0.02的情况下,空间分辨率为42.5微米。如果反射镜的尺寸大于42.5微米,则可以分辨每个反射镜。反射镜的合理尺寸是100
×
100微米。
[0057]
通过使反射镜围绕它们各自的轴旋转/倾斜,可以将不同的中心波长带引导到低na中继系统135中。在可见光波长范围上的工作所需的每个反射镜的旋转范围应为δλ/2p,其中对于450nm-850nm的工作波长范围,δλ=400nm。这意味着每个反射镜必须能够旋转0.4弧度。
[0058]
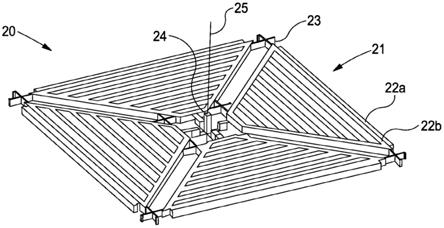
图2中的mems系统是具有反射镜(未示出)和用于使反射镜进行位移的四个静电致动器21的微反射镜。在其它实施例(未示出)中,微反射镜可以具有不同数目的静电致动器21,该静电致动器21用于使反射镜进行位移。在所有这些实施例中,微反射镜具有一个或多个静电致动器21,该一个或多个静电致动器21用于使反射镜进行位移。如图2所示的多个微反射镜可以被布置成阵列以形成微反射镜阵列。
[0059]
图2示出了用于使阵列中的反射镜(未示出)进行位移的微反射镜阵列20的一部分
的示意图。阵列20的该部分包括为两对梳状致动器的静电致动器21。四个梳状致动器21中的每个梳状致动器包括固定部分22a和移动部分22b,该固定部分22a被固定到衬底,该移动部分22b相对于衬底是可移动的。可移动部分22b被成形为梯形,并且在梯形的每个角处通过锚定件23被柔性地锚定到衬底。锚定件23在衬底和梳状致动器21的可移动部分22b之间提供柔性连接。每个梳状致动器的可移动部分22b被连接到支撑反射镜的柱24。通过向梳状致动器21施加电压,致动器21的可移动部分22b相对于衬底移动并且在柱24上施加力,该力使反射镜偏转并且由此使反射镜进行位移。位移的大小是所施加的电压的函数。通过选择性地向梳状致动器对施加电压,反射镜可以倾倒和/或倾斜。微反射镜阵列20具有围绕轴25的四重旋转对称性。
[0060]
图3示出了用于使阵列中的反射镜(未示出)进行位移的微反射镜阵列30的一部分的示意图。微反射镜阵列30可以是图2的微反射镜阵列20。微反射镜阵列30具有围绕轴39的四重旋转对称性。阵列30的部分包括柱31,该柱31用于支撑被连接到四对弹性元件32、35、36、37的反射镜。柱31通常被连接到反射镜的背面的中心(即,反射镜中与反射表面相对的部分)。例如参考该对弹性元件32,其包括上弹性元件33a和下弹性元件33b。这里,术语“上”和“下”是指衬底平面上方的不同距离。弹性元件33a、33b是柔性材料带,通常是硅带。每对弹性元件32的上弹性元件33a被连接到静电致动器(未示出),诸如梳状致动器。弹性元件33a、33b可以将力从静电致动器传递到柱31,以便使柱31相对于衬底偏转和/或平移,并且由此使反射镜相对于衬底进行位移。柔性连接器34是在直接平行于衬底平面的方向上从柱31延伸的薄硅线(thin silicon strand),并且被安装在柱31上,用于将热量从反射镜传递到散热器(未示出),同时不显著阻碍柱31的运动。柔性连接器34可以形成在与上弹性元件33a相同的硅层中。
[0061]
假设与弹性元件对35、37相对应的静电致动器用于在箭头38所指示的方向上平移柱39的下端部,箭头38所指示的方向横向于轴39。这使另一对弹性元件32、36变形。也就是说,弹性元件对32、36中的每个弹性元件对的底部弹性元件相对于该弹性元件对的顶部弹性元件在方向38上进行位移,并且这趋向于使底部弹性元件相对于衬底围绕其伸长方向旋转。这使柱31围绕该伸长方向旋转。因此,柱31(以及其支撑的反射镜)相对于衬底的顶表面倾斜。
[0062]
图4a示出了微反射镜阵列40(其可以是微反射镜阵列20、30中的一个微反射镜阵列)的一部分的顶视图的示意图。阵列40的该部分包括用于支撑反射镜(未示出)的柱41和经由弹性元件43被连接到柱41的两对梳状致动器42。每个梳状致动器42可以包括被成形为梯形的部分,并且通过锚定件44在梯形的一些或全部角处被柔性地锚定到衬底。图4a所示的阵列40的该部分还包括热扩散器45,该热扩散器45包括散热器(未示出)和将柱41连接到散热器的柔性连接器46。
[0063]
图4a还更详细地图示了梳状致动器42中的每个梳状致动器的构造。如在已知的梳状致动器设计中,每个梳状致动器的固定部分包括由梳状致动器42的移动部分43c的一部分包围的两个平行导体部分42a、42b。多个导体元件(“固定齿”)从导体部分42a、42b中的每个导体部分在相应的相反方向上朝向梳状致动器的移动部分42c延伸。导体部分42a、42b中的每个导体部分的固定齿与被安装在梳状致动器的移动部分42c上的大约相同长度的对应的多个“移动齿”交错,并且朝向对应的导体部分42a、42b延伸。根据导体部分42a、42b和移
动部分42c的不同电压,在移动齿和对应的固定齿之间产生力。通常,对于移动部分42c相对于导体部分42a、42b的移动范围,这些力是相对恒定的,该移动范围大约是齿的长度。
[0064]
例如,当每个梳状致动器的导体部分42b和移动部分42c被置于零伏并且导体部分42a被设置为非零电压(例如正100伏)时,在导体部分42a的固定齿和梳状致动器的移动部分42c的移动齿之间生成吸引力。这将移动部分42c向图4a中的左边拉动近似等于齿的长度的距离。相反,如果导体部分42a和移动部分42c均接地,并且向导体部分42b施加非零电压,则梳状致动器的移动部分42c被推向右边。
[0065]
图4b示出了微反射镜阵列的类似部分,但包括来自反射镜并被连接到柱41的四个突起47。突起47是用于感测反射镜的位移的感测元件的部分。感测元件还包括在每个突起47下面的电极(未示出),该感测元件被布置为感测突起47与该电极之间的电容。感测元件可以是位移控制反馈系统的一部分,其中所测量的电容用于确定反射镜位置。然后,反馈系统可以基于所确定的反射镜位置和基于目标反射镜位置来调整被施加给梳状致动器42的电压。突起还具有在反射镜和柱41之间提供较大接合面积的附加优势。
[0066]
图5示出了微反射镜阵列(可以是上述微反射镜阵列20、30和/或40)中的反射镜50的一部分的横截面图。反射镜50通常是矩形的(在本文中用于包括正方形),其中每个边在0.5mm至2.5mm的范围内。例如,它可以是具有1mm2的表面积和100μm的贯穿厚度的正方形。反射镜50被连接到支撑反射镜的柱51的一端部。柱51可以是具有20μm
×
20μm端表面和150μm贯穿厚度(即高度)的立方体。柱51的下端部被连接到第一弹性元件52(底部弹性元件)的第一端部。第一弹性元件52的相对端部(经由垂直延伸的柱)被连接到第二弹性元件53(顶部弹性元件)的第一端部。第二弹性元件53的第二端部被连接到梳状致动器55的移动部分54a。梳形致动器的移动部分54a的一个角通过柱591被连接到衬底57,该柱591通过连接件592被安装在衬底57上(注意,柱591和连接件592在进入图的方向上与第一弹性元件52和第二弹性元件53相距不同的距离;即,包含柱51、第一弹性元件52和第二弹性元件53的平面不包含柱591或连接件592)。因此,反射镜50由柱51支撑,柱51又由第一弹性元件52支撑,第一弹性元件52又由第二弹性元件53支撑,第二弹性元件53又由梳状致动器的移动部分54a支撑,梳状致动器的移动部分54a又使用柱591和连接件592由衬底57支撑。
[0067]
由柱591和连接件592提供的移动部件54a和衬底57之间的连接件是有弹性的,并且随着梳状致动器的移动部件54a相对于衬底57横向移动(即,在图5中的左右方向上)而弯曲。
[0068]
因此,柱51由包括多个弹性构件(resilient member)的多个构件从衬底57被支撑,该多个弹性构件允许柱51相对于衬底57移动。具体地,柱51相对于衬底57是可横向平移的,此外,柱51相对于衬底57是可偏转的,因此改变反射镜的表面与衬底57的顶表面的相对取向。
[0069]
通过向梳状致动器55施加电压,移动部分54a可以被拉向梳状致动器55的固定部分54b。两个弹性元件52和53将柱51耦合到梳状致动器55,以便将力从梳状致动器传递到柱51,从而使反射镜50进行位移。第一弹性元件52可以是1μm厚的多晶硅带,并且第二弹性元件53可以是1μm厚的单晶硅带。梳状致动器55的梳状件可以是30μm厚的多晶硅。
[0070]
作为热扩散器的一部分的柔性连接器56被连接在柱51和衬底57之间。柔性连接器56通过柱593和连接件594被连接到衬底57,柱593和连接件594不位于包含柱51、第一弹性
元件52和弹性元件53的平面中。柔性连接器56、柱593和连接件594中的一个或多个(并且通常是全部)被布置为当柱51相对于衬底57移动时弯曲。
[0071]
热扩散器的柔性连接器56和第二弹性元件53可以形成在相同的硅层中。热扩散器还可以被布置为将柱51电连接到衬底57。图5中仅示出了反射镜50和下面的mems组件的横截面的一半,其中虚线58表示镜像对称。
[0072]
微反射镜阵列的实施例可以提供 /-120mrad的倾倒和倾斜位移范围以及100μrad的反射镜精度。微反射镜阵列的实施例可以在euv所需的高光强度下操作,并且可以在40至60kw/m2的吸收热功率密度下工作(这意味着反射镜表面上的入射光功率密度甚至更大)。这比在一些其它应用中所使用的微反射镜阵列的吸收热功率密度高几个数量级。这是可能的,因为即使在相对低的致动器电压(例如,低于约100伏)下,梳状致动器21也能够被操作以提供强的力,使得它们能够使柔性连接器56变形,即使柔性连接器56足够厚以向衬底提供高导热性。由于高热导率,微反射镜阵列在使用中可以具有低于约100摄氏度的温度。
[0073]
反射镜的外边缘可以移动的距离可以在50-120的范围内,诸如大约80。典型地,已知的微反射镜阵列允许比这更小的运动范围,诸如仅几微米。在该实施例中实现了更大的间隔,因为致动力(横向地)被施加到支柱,而不是例如通过具有被安装在反射镜上的第一导体板和被安装在衬底上的第二导体板的静电致动器。这通常将反射镜的移动范围限制为板的相对移动范围,使得静电致动器能够有效地操作。通常,该距离仅为几微米。此外,使用梳状致动器意味着即使致动器的移动部分和固定部分相对移动大致等于齿的长度的量,致动器也是有效的。
[0074]
本文还描述了形成微反射镜阵列的方法。根据实施例的方法包括:提供多个硅晶片,在晶片中形成微反射镜阵列的元件,然后将晶片彼此接合。
[0075]
图6示出了被接合在一起以形成微反射镜阵列的五个硅晶片的示意图。这五个晶片包括用于形成反射镜601的晶片600、用于形成上弹性元件603并且可选地用于形成热扩散器的柔性连接器604的晶片602、用于形成梳状致动器的梳状件606并且用于形成下弹性元件607的晶片605、作为用于提供到微反射镜阵列的电连接并且还用于形成支撑微反射镜阵列的衬底609的插入件晶片的晶片608、以及用于提供到插入件晶片608的电连接的晶片610。
[0076]
形成微反射镜阵列的方法可以包括以下步骤:
[0077]
a.提供第一晶片602(“上弹性晶片”),第一晶片602可以是具有1um高掺杂硅膜的soi晶片。上弹性603图案形成在晶片中,并且可选地热扩散器的柔性连接器604形成在晶片中。
[0078]
b.提供第二晶片605(“梳状晶片”)并且在第二晶片605中形成梳状件606。梳状晶片可以包括被接合在一起的两个soi晶片,一个soi晶片具有薄的(例如1um)高掺杂硅膜,另一soi晶片具有较厚的(例如30um)高掺杂硅层。备选地,梳状晶片605可以包括具有薄的(例如1um)高掺杂硅膜和沉积在其上的高掺杂硅层(例如30um厚)的一个soi晶片。晶片605被图案化以形成梳状致动器的梳状件606。
[0079]
c.将第一晶片600接合到第二晶片605,以便将上弹性元件603连接到梳状致动器。接合步骤可以包括与腔的熔合接合。在接合之后,可以去除第二晶片605的操作晶片(handle wafer),随后通过过孔图案化、金属填充和图案化或cmp、以及光刻和蚀刻来形成
下弹性元件607。
[0080]
d.提供第三晶片608(“插入件晶片”),第三晶片608可以是具有100um硅膜的soi晶片。第三晶片608被图案化以形成腔孔。
[0081]
e.将第三晶片608接合到第一晶片602和第二晶片605,以便将梳状致动器连接到衬底609。接合步骤可以包括与腔的熔合接合。在接合之后,可以去除第三晶片608的操作晶片,随后是通过第三晶片608的硅和氧化物的过孔蚀刻、氧化物衬垫沉积(oxide liner deposition)、然后进一步的通过硅和氧化物进入第二晶片602的过孔蚀刻、tsv cu填充和cmp、以及在插入件晶片608的非接合侧上的再分布层(rdl)图案形成。
[0082]
f.形成到散热器和感测元件的连接。形成到散热器和到感测元件的连接的步骤可以包括:去除第一晶片602的操作晶片,随后是通过第一晶片602的高掺杂硅膜的通孔图案化和蚀刻、金属填充和图案化、沉积接合金属和图案化、以及去除第一晶片602的高掺杂硅膜的顶部上的氧化物膜。
[0083]
g.提供第四晶片600(“反射镜晶片”)。反射镜晶片600可以是具有250um硅膜的soi晶片。提供反射镜晶片600可以包括:沉积接合材料和图案化,形成作为感测元件的电容器顶板的突起,沉积硬掩模和图案化,提供抗蚀剂掩模和蚀刻硅(例如100um蚀刻和过蚀刻),去除抗蚀剂掩模和进一步蚀刻硅(例如150um),以及去除硬掩模。
[0084]
h.将反射镜晶片600接合到包括第一晶片602、第二晶片605和第三晶片608的晶片堆叠,以便形成将反射镜连接到衬底609的柱。接合可以包括共晶接合。
[0085]
i.在第三晶片608上形成凸块焊盘,并且蚀刻以释放支撑反射镜601的柱。
[0086]
j.提供第五晶片610(“电子晶片”)。提供第五晶片610的步骤可以包括:在电子晶片中提供hv、模拟和数字cmos组件,形成tsv(例如5000到10000个连接件),以及形成用于连接到插入件晶片608的凸块球。
[0087]
k.使用相应晶片608和610上的焊料凸块将电子晶片610附接到插入件晶片608。
[0088]
l.移除反射镜晶片600的操作晶片以释放反射镜601,随后进行切割(例如激光切割)以完成微反射镜阵列。
[0089]
图7示出了形成微反射镜阵列的备选方法的示意图,该微反射镜阵列仅包括被接合在一起的三个晶片。这三个晶片包括:用于形成反射镜701的反射镜晶片700;用于形成弹性元件703、梳状致动器的梳状件704和支撑微反射镜阵列的衬底705的中间晶片702;以及用于提供到微反射镜阵列的电连接707的电子晶片706。
[0090]
形成微反射镜阵列的方法可以包括以下步骤:
[0091]
a.提供第一晶片702(“中间晶片”)。提供的步骤可以包括:提供具有1um高掺杂硅膜的soi晶片,沉积氧化物,锚定沟槽的蚀刻,利用多晶硅填充沟槽(随后cmp),对氧化物图案化以提供用于下弹性元件703的掩模层,以及在图案化的氧化物上外延生长30um厚的硅层(随后cmp)。提供中间晶片的步骤还可以包括:使用氧化物作为停止层的硅干反应离子蚀刻(drie),利用氧化物填充被蚀刻的硅,外延生长用于上弹性元件703的1um硅层(多晶和单晶),以及蚀刻硅层以形成上弹性元件703。提供中间晶片的步骤可以还包括:翻转晶片,过孔蚀刻,隔离层沉积,利用金属填充过孔和图案化(例如,以形成5000到10000个连接件)。
[0092]
b.提供第二晶片700(“反射镜晶片”)。反射镜晶片700可以是具有250um硅膜的soi晶片。提供反射镜晶片700可以包括:沉积接合材料和图案化,形成作为感测元件的电容器
顶板的突起,沉积硬掩模和图案化,提供抗蚀剂掩模和蚀刻硅(例如100um蚀刻和过蚀刻),去除抗蚀剂掩模和进一步蚀刻硅(例如150um),以及去除硬掩模。
[0093]
c.将第一晶片和第二晶片接合在一起。接合可以包括共晶接合。
[0094]
d.释放弹性元件703和梳状件704。释放步骤可以包括:形成凸块焊盘(例如,每个反射镜10至20个),蚀刻通过第一晶片的操作晶片的过孔以形成用于下弹性元件703的移动的空间,从而形成用于随后的气相hf蚀刻的路径,使用气相hf蚀刻来蚀刻氧化物以释放弹性元件703和梳状件704。
[0095]
e.提供第三晶片706(“电子晶片”)。提供电子晶片706的步骤可以包括:在电子晶片中提供hv、模拟和数字cmos组件,形成tsv(例如5000到10000个连接件),以及形成用于连接到中间晶片702的凸块球。
[0096]
f.使用相应晶片上的焊料凸块将电子晶片706附接到中间晶片702。
[0097]
g.移除反射镜晶片700的操作晶片以释放反射镜701,随后切割(例如激光切割)以完成微反射镜阵列。
[0098]
尽管在本文中可以具体参考光刻设备在ic制造中的使用,但是应当理解,这里描述的光刻设备可以具有其它应用。可能的其它应用包括集成光学系统的制造、用于磁畴存储器的引导和检测图案、平板显示器、液晶显示器(lcd)、薄膜磁头等。
[0099]
虽然上面已经描述了本发明的特定实施例,但是应当理解,本发明可以以不同于所描述的方式来实施。以上描述旨在说明而非限制。因此,对于本领域的技术人员显而易见的是,在不脱离以下阐述的权利要求的范围的情况下,可以对所描述的本发明进行修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。