1.本发明属于电磁敏感度测试、智能汽车技术领域,尤其涉及一种智能驾驶汽车传导敏感性测试平台及测试方法。
背景技术:
2.电动化、网联化、智能化是汽车领域发展的趋势,目前智能驾驶汽车尚未正式投入使用,相关产品还在进一步研发中,但由于其环保节能、舒适体验以及有望缓解当前交通问题等特点,很有可能将作为未来交通出行的主要方式。
3.在汽车电动化、网联化和智能化的过程中,汽车所使用的电子元件迅速增加,汽车内部的电路越来越集成化,不仅如此,车上线缆的总长度也在不断增加,使得汽车各部件更容易受到传导干扰的影响;而随着精密性的提高,汽车所使用的控制系统、显示系统等也变得越来越敏感。除此之外,随着通信、高压电传输等技术的快速发展,环境中的基站、各种通信终端以及高压线等不断增多,智能驾驶汽车行驶过程中可能面临的电磁环境也因此变得逐渐复杂。因此,为保证智能驾驶汽车的行车安全和体验,必须对其进行传导敏感性测试。
4.汽车传导敏感性测试是指测试汽车对传导干扰信号的承受能力。智能驾驶汽车上许多部件都端接着电源线和信号线,它们在传输能量和信号的同时,也可能是传导干扰的耦合通道,因此需要对智能驾驶汽车进行传导敏感性测试,确定通过线缆耦合的干扰信号对汽车的影响。目前汽车的传导敏感性测试主要是针对传统的汽车以及电动汽车,在测试过程中无法激活智能驾驶汽车的智能驾驶系统和车联网通信系统;而且目前的测试方法是直接利用脉冲调制的正弦波干扰信号在测试频带内进行单频点扫描,对于被测智能驾驶汽车内许多在测试频带内对传导干扰不敏感的部件而言,直接采用这样的方式进行测试,花费大量时间测试才能得到一个被测部件在测试频带内不敏感的结果,这样使得整个测试的测试量非常大,耗费时间非常长。而且因为测试时间长,往往为了节省时间,实际测试过程中扫描的步长不会设置的太小,这就可能导致测试过程中的两个测试频点之间存在敏感频点未被测到的情况。
5.专利申请公开号cn110907739a,一种用于智能网联汽车的电磁抗扰性能测试系统及方法,公开了在电波暗室内进行单车智能和车联网技术融合方案下整车的电磁抗扰性能测试。但该测试系统及方法仅针对智能网联汽车的辐射抗扰性能测试,没有考虑以基于激光雷达的感知算法实现智能驾驶的智能网联汽车,且仍然直接利用脉冲调制的正弦波干扰信号在测试频带内进行单频点扫描,测试量大,测试时间长。
6.专利申请公开号cn107192902a,一种使用多高斯脉冲的线缆传导敏感度时域测试方法,包括:分析多高斯脉冲频谱;设计敏感频点定位流程;使用labview实现定位流程。其优点在于:能够很好地模拟设备在实际工作中所面临的复杂电磁环境;能够全面地反映干扰信号可能存在的形式;通过labview实现自动化测试,操作简单,节约了测试时间。但该方法需使用包含高斯单脉冲、双高斯脉冲、高斯偶脉冲在内的多种复杂脉冲信号,对所需的时域脉冲成形模块和相应注入探头要求严苛,同时该方法为针对gjb提出的改进方法,对设备
电磁兼容性要求更加严苛,并不适合直接应用于智能驾驶汽车传导敏感性测试。
7.专利申请公开号cn101520479a,一种精确多频同步协同传导敏感度高速测试方法,对整个测试频率从低到高进行分组,测试时按组步进式切换频率,该方法一次扫描可同步测试多个频点,并自动实现按组步进式扫描,大大提高了敏感度试验的测试效率;能够快速诊断敏感点故障。但该方法每次注入多个单频干扰信号,没有考虑多个单频干扰信号干扰设备的耦合效应,其测试精确性不如直接单频扫描的方法。
8.现有针对智能驾驶汽车的电磁兼容性测试技术能够模拟实际工况,但如果采用同样的方法模拟实际工况,而按照传统的汽车传导敏感性测试方法对智能驾驶汽车进行传导敏感性测试,即直接利用脉冲调制的正弦波干扰信号在测试频带内进行单频点扫描,则存在测试量非常大、测试时间非常长,甚至可能漏掉某些敏感频点的问题。
技术实现要素:
9.为了在暗室内针对智能驾驶汽车进行快速的传导敏感性测试并获取智能驾驶汽车的传导敏感性数据,本发明提出一种智能驾驶汽车传导敏感性测试平台及测试方法,实现了在暗室内针对智能驾驶汽车快速地进行传导敏感性测试,解决了现有相关测试技术测试量大、测试时间长的问题,测试时间更短。本发明的具体技术方案如下:一种智能驾驶汽车传导敏感性测试平台,包括在电波暗室内设置的智能驾驶系统激活模块、车联网通信环境模拟模块、传导干扰施加与监测模块和数据监测模块,其中,以车载摄像头、激光雷达,以及以二者的感知数据为核心的感知控制算法组成智能驾驶系统;所述智能驾驶系统激活模块包括安装在被测智能驾驶汽车的所述车载摄像头前方1-2米处的视频播放设备及与被测智能驾驶汽车的工控机连接的激光雷达点云数据存储设备,其中,所述视频播放设备,用于播放被测智能驾驶汽车实际工作状态下的道路场景视频以激活所述车载摄像头;所述激光雷达点云数据存储设备,用于存储被测智能驾驶汽车实际工作状态下的道路场景的激光雷达点云数据,并传输给被测智能驾驶汽车的工控机;所述车联网通信环境模拟模块包括无线通信综合测试仪和gps信号模拟器,其中,所述无线通信综合测试仪,模拟被测智能驾驶汽车在实际工作状态下收到的v2x信号,并通过天线发射出去,以激活被测智能驾驶汽车的车联网v2x系统;所述gps信号模拟器,模拟被测智能驾驶汽车实际工作状态下的道路场景的gps信号,并通过天线发射出去,以激活被测智能驾驶汽车的导航系统;所述传导干扰施加与监测模块包括依次连接的高斯脉冲生成器、功率放大器、定向耦合器、电流注入探头、与所述定向耦合器连接的功率测量仪器,以及相互连接的电流测量探头和频谱分析仪,其中,所述高斯脉冲生成器生成高斯脉冲干扰信号,高斯脉冲干扰信号用于确定被测智能驾驶汽车的被测部件是否在测试频带内敏感,再用干扰信号源替换所述高斯脉冲生成器,所述干扰信号源生成脉冲调制的正弦波干扰信号,脉冲调制的正弦波干扰信号用于确定具体敏感频点和敏感门限电平,高斯脉冲干扰信号和脉冲调制的正弦波干扰信号经过所述功率放大器、所述定向耦合器和所述电流注入探头注入到与被测智能驾驶汽车的被测部件端接的线缆上,通过所述电流测量探头和所述频谱分析仪实时监测线缆上的信号频谱和功率;
所述数据监测模块包括数据收集设备和监控设备,所述数据收集设备通过连接被测智能驾驶汽车的工控机获得测试过程中智能驾驶系统、车联网通信系统的数据,所述监控设备用于记录测试过程中被测智能驾驶汽车整车的工作状态。
10.进一步地,所述智能驾驶系统激活模块中,所述视频播放设备播放的被测智能驾驶汽车实际工作状态下的道路场景视频全部位于所述车载摄像头的读取范围内,且所述车载摄像头仅能读取所述视频播放设备播放的被测智能驾驶汽车实际工作状态下的道路场景信息,不读取所述电波暗室内的其他信息;所述传导干扰施加与监测模块中,所述高斯脉冲生成器能够生成覆盖测试频带的高斯脉冲,所述干扰信号源、所述功率放大器、所述电流注入探头及所述电流测量探头的工作带宽覆盖测试频带。
11.基于所述的测试平台的测试方法,包括以下步骤:s1:获取实际道路场景的信息;从实际工作状态下的智能驾驶汽车的工控机获取实际道路场景下的视频图像、激光雷达点云数据、v2x通信信号、gps信号,用于在电波暗室内模拟实际道路场景;s2:激活被测智能驾驶汽车的智能驾驶系统和车联网通信系统;视频播放设备播放被测智能驾驶汽车实际工作状态下的道路场景视频,以激活被测智能驾驶汽车的车载摄像头;激光雷达点云数据存储设备将存储的同一道路场景下的激光雷达点云数据传输至工控机;无线通信综合测试仪模拟同一道路场景下被测智能驾驶汽车收到的v2x信号,并通过天线发射出去,以激活被测智能驾驶汽车的v2x系统;gps信号模拟器模拟同一道路场景下的gps信号,并通过天线发射出去,以激活被测智能驾驶汽车的导航系统;s3:进行传导敏感性测试。
12.进一步地,所述步骤s3的具体过程为:s3-1:校验传导干扰施加与监测模块;通过测量电流注入探头的前向功率确定注入电流大小;在测试频带范围内扫频,测量达到测试限值电流所需的前向功率;s3-2:确定高斯脉冲干扰信号的参数;高斯脉冲干扰信号的标准差σ决定其频带,测试时要求高斯脉冲干扰信号的频带覆盖测试频带,根据测试频带确定高斯脉冲的标准差;通过快速傅里叶变换得到高斯脉冲干扰信号的频带,调整标准差使其频带覆盖测试频带;s3-3:确定被测部件在测试频带内是否敏感;对于被测智能驾驶汽车的被测部件端接的每一根线缆,首先利用高斯脉冲生成器生成高斯脉冲干扰信号,将高斯脉冲干扰信号通过传导干扰施加与监测模块注入到所述线缆中,若被测智能驾驶汽车出现行车状态异常现象,则判断为车辆受到电磁干扰影响,说明被测部件在测试频带内存在敏感频点,继续进行步骤s3-4,否则从所述线缆处耦合的干扰信号不会对被测部件造成干扰,更换线缆重新测试确定被测部件在测试频带内是否敏感;s3-4:确定被测部件具体的敏感频点和敏感门限电平;利用干扰信号源产生脉冲重复频率为1khz、占空比为50%的脉冲调制的正弦波干扰信号,正弦波频率为1mhz;将所述干扰信号通过传导干扰施加与监测模块注入到所述线缆中,并监测感应电流;在测试频带内对正弦波频率进行扫描,观察车辆是否正常工作,若
出现行车状态异常现象,则判断为车辆受到了电磁干扰的影响,记录此时的频点为敏感频点并获取敏感门限电平;更换线缆重新测试。
13.进一步地,所述步骤s3-2中,测试频带选择1mhz~400mhz时,选择标准差为3.4
×
10-10
s的高斯脉冲干扰信号,其频带能够覆盖测试频带。
14.本发明的有益效果在于:本发明的一种智能驾驶汽车传导敏感性测试平台及测试方法能够在暗室内激活智能驾驶汽车的智能驾驶系统和车联网通信系统的条件下快速地进行智能驾驶汽车的传导敏感性测试,获取智能驾驶汽车传导敏感性数据,相比于现有的针对汽车的传导敏感性测试方法,能够在模拟智能驾驶汽车的实际工况的同时,极大缩短整个测试的测试时间,提高测试效率,操作方便,具备可重复性。
附图说明
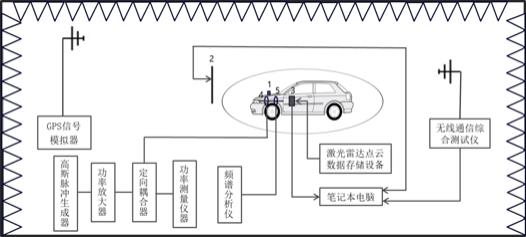
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中:图1是本发明的智能驾驶汽车传导敏感性测试平台结构示意图;图2是本发明的传导干扰施加与监测模块布置图;图3是本发明的传导敏感性测试流程图;图4是本发明的传导干扰施加与监测模块校验布置图;图5是本发明实施例的敏感频点和敏感门限电平。
16.附图标号说明:1-车载摄像头;2-视频播放设备;3-工控机;4-电流注入探头;5-电流测量探头。
具体实施方式
17.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
18.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
19.本发明的测试平台与测试方法同样是基于模拟智能驾驶汽车的实际工作状态,与现有技术不同之处包括两个方面:首先,现有测试技术针对的是智能驾驶汽车的辐射抗扰性能和电磁自兼容性,本发明针对的是智能驾驶汽车的传导敏感性;传统的汽车传导敏感性测试方法为利用脉冲调制的正弦波干扰信号并进行单频点扫描,本发明涉及的测试方法先利用高斯脉冲干扰信号确定被测部件在测试频带内是否敏感,再利用脉冲调制的正弦波干扰信号确定被测部件具体的敏感频点和敏感门限电平,与传统的汽车传导敏感性测试方法相比,测试效率更高,能够更快完成测试。
20.其次,现有技术都仅针对基于车载摄像头和毫米波雷达实现智能驾驶的智能驾驶
汽车,没有考虑基于激光雷达实现智能驾驶的智能驾驶汽车。本发明针对基于车载摄像头和激光雷达实现智能驾驶的智能驾驶汽车。
21.具体地,如图1所示,一种智能驾驶汽车传导敏感性测试平台,包括在电波暗室内设置的智能驾驶系统激活模块、车联网通信环境模拟模块、传导干扰施加与监测模块和数据监测模块,其中,以车载摄像头1、激光雷达,以及以二者的感知数据为核心的感知控制算法组成智能驾驶系统;智能驾驶系统激活模块包括安装在被测智能驾驶汽车的车载摄像头1前方1-2米处的视频播放设备2及与被测智能驾驶汽车的工控机3连接的激光雷达点云数据存储设备,其中,视频播放设备2,用于播放被测智能驾驶汽车实际工作状态下的道路场景视频以激活车载摄像头1;激光雷达点云数据存储设备,用于存储被测智能驾驶汽车实际工作状态下的道路场景的激光雷达点云数据,并传输给被测智能驾驶汽车的工控机3;车联网通信环境模拟模块包括无线通信综合测试仪和gps信号模拟器,其中,无线通信综合测试仪,模拟被测智能驾驶汽车在实际工作状态下收到的v2x信号,并通过天线发射出去,以激活被测智能驾驶汽车的车联网v2x系统;gps信号模拟器,模拟被测智能驾驶汽车实际工作状态下的道路场景的gps信号,并通过天线发射出去,以激活被测智能驾驶汽车的导航系统;较佳地,智能驾驶系统激活模块可利用汽车仿真软件建立虚拟的道路环境代替,根据实际被测车辆相关传感器的参数建立虚拟环境以激活传感器,例如软件prescan。
22.如图2和图4所示,传导干扰施加与监测模块包括依次连接的高斯脉冲生成器、功率放大器、定向耦合器、电流注入探头、与定向耦合器连接的功率测量仪器,以及相互连接的电流测量探头5和频谱分析仪,其中,高斯脉冲生成器生成高斯脉冲干扰信号,高斯脉冲干扰信号用于确定被测智能驾驶汽车的被测部件是否在测试频带内敏感,再用干扰信号源替换高斯脉冲生成器,干扰信号源生成脉冲调制的正弦波干扰信号,脉冲调制的正弦波干扰信号用于确定具体敏感频点和敏感门限电平,高斯脉冲干扰信号和脉冲调制的正弦波干扰信号经过功率放大器、定向耦合器和电流注入探头4注入到与被测智能驾驶汽车的被测部件端接的线缆上,通过电流测量探头5和频谱分析仪实时监测线缆上的信号频谱和功率;数据监测模块包括数据收集设备和监控设备,数据收集设备通过连接被测智能驾驶汽车的工控机3获得测试过程中智能驾驶系统、车联网通信系统的数据,监控设备用于记录测试过程中被测智能驾驶汽车整车的工作状态。
23.在一些实施方式中,智能驾驶系统激活模块中,视频播放设备播放的被测智能驾驶汽车实际工作状态下的道路场景视频全部位于车载摄像头1的读取范围内,且车载摄像头1仅能读取视频播放设备2播放的被测智能驾驶汽车实际工作状态下的道路场景信息,不读取电波暗室内的其他信息;传导干扰施加与监测模块中,高斯脉冲生成器能够生成覆盖测试频带的高斯脉冲,干扰信号源、功率放大器、电流注入探头4及电流测量探头5的工作带宽覆盖测试频带。
24.如图3所示,基于前述测试平台的测试方法,包括以下步骤:s1:获取实际道路场景的信息;从实际工作状态下的智能驾驶汽车的工控机3获取实际道路场景下的视频图像、激光雷达点云数据、v2x通信信号、gps信号,用于在电波暗室
内模拟实际道路场景;s2:激活被测智能驾驶汽车的智能驾驶系统和车联网通信系统;视频播放设备2播放被测智能驾驶汽车实际工作状态下的道路场景视频,以激活被测智能驾驶汽车的车载摄像头1;激光雷达点云数据存储设备将存储的同一道路场景下的激光雷达点云数据传输至工控机3;无线通信综合测试仪模拟同一道路场景下被测智能驾驶汽车收到的v2x信号,并通过天线发射出去,以激活被测智能驾驶汽车的v2x系统;gps信号模拟器模拟同一道路场景下的gps信号,并通过天线发射出去,以激活被测智能驾驶汽车的导航系统;s3:进行传导敏感性测试,具体过程为:s3-1:校验传导干扰施加与监测模块;通过测量电流注入探头4的前向功率确定注入电流大小;在测试频带范围内扫频,测量达到测试限值电流所需的前向功率;s3-2:确定高斯脉冲干扰信号的参数;高斯脉冲干扰信号的标准差σ决定其频带,测试时要求高斯脉冲干扰信号的频带覆盖测试频带,根据测试频带确定高斯脉冲的标准差;通过快速傅里叶变换得到高斯脉冲干扰信号的频带,调整标准差使其频带覆盖测试频带;s3-3:确定被测部件在测试频带内是否敏感;对于被测智能驾驶汽车的被测部件端接的每一根线缆,首先利用高斯脉冲生成器生成高斯脉冲干扰信号,将高斯脉冲干扰信号通过传导干扰施加与监测模块注入到线缆中,若被测智能驾驶汽车出现行车状态异常现象,则判断为车辆受到电磁干扰影响,说明被测部件在测试频带内存在敏感频点,继续进行步骤s3-4,否则从线缆处耦合的干扰信号不会对被测部件造成干扰,更换线缆重新测试确定被测部件在测试频带内是否敏感;s3-4:确定被测部件具体的敏感频点和敏感门限电平;利用干扰信号源产生脉冲重复频率为1khz、占空比为50%的脉冲调制的正弦波干扰信号,正弦波频率为1mhz;将干扰信号通过传导干扰施加与监测模块注入到线缆中,并监测感应电流;在测试频带内对正弦波频率进行扫描,观察车辆是否正常工作,若出现行车状态异常现象,则判断为车辆受到了电磁干扰的影响,记录此时的频点为敏感频点并获取敏感门限电平;更换线缆重新测试。
25.较佳地,测试频带选择1mhz~400mhz时,选择标准差为3.4
×
10-10
s的高斯脉冲干扰信号,其频带能够覆盖测试频带。
26.本发明的智能驾驶汽车传导敏感性测试平台及方法,能够在暗室内激活智能驾驶汽车的智能驾驶系统和车联网通信系统的条件下进行智能驾驶汽车的传导敏感性测试,获取智能驾驶汽车传导敏感性数据,相比于现有的针对汽车的传导敏感性测试方法,能够在模拟智能驾驶汽车的实际工况的同时,极大缩短整个测试的测试时间,提高测试效率。
27.为了方便理解本发明的上述技术方案,以下通过具体实施例对本发明的上述技术方案进行详细说明。
28.实施例1本实施例通过一款基于百度的apollo自动驾驶平台的智能驾驶汽车展开,基于百度apollo自动驾驶平台的智能驾驶汽车,其实现智能感知的传感器包括车载摄像头、激光
雷达和毫米波雷达,本实施例中智能驾驶汽车通过车载摄像头和激光雷达实现封闭园区自动驾驶。整个实验装置布置如图1,相关实验详细过程如下:s1:获取实际道路场景的信息;实验中,智能驾驶汽车在北京航空航天大学某校园路段进行自动驾驶,从此时工作状态下的智能驾驶汽车的工控机3获取校园路段的视频图像、激光雷达点云数据、v2x通信信号、gps信号,用于在电波暗室内模拟校园路段的实际道路场景;s2:激活被测智能驾驶汽车的智能驾驶系统和车联网通信系统;视频播放设备2播放校园路段的实际道路场景,以激活被测智能驾驶汽车的车载摄像头1;激光雷达点云数据存储设备将存储的校园路段下的激光雷达点云数据传输至工控机3;无线通信综合测试仪通过天线发射模拟的校园路段下被测智能驾驶汽车收到的v2x信号,以激活被测智能驾驶汽车的v2x系统;gps信号模拟器通过天线发射模拟的校园路段下的gps信号以激活被测智能驾驶汽车的导航系统;s3:传导敏感性测试,具体过程为:s3-1:校验传导干扰施加与监测模块。通过测量电流注入探头4的前向功率确定注入电流大小;在测试频带范围内扫频,测量达到测试限值电流所需的前向功率;s3-2:确定高斯脉冲干扰信号的参数;高斯脉冲干扰信号的标准差σ决定其频带,测试时要求高斯脉冲干扰信号的频带覆盖测试频带,根据测试频带确定高斯脉冲的标准差;通过快速傅里叶变换得到高斯脉冲干扰信号的频带,调整标准差使其频带覆盖测试频带;本实施例中测试频带选择1mhz~400mhz,选择标准差为3.4
×
10-10
s的高斯脉冲干扰信号,其频带能够覆盖测试频带;s3-3:确定被测部件在测试频带内是否敏感;本实施例中被测部件选择被测智能驾驶汽车的制动控制器和电机,对于被测智能驾驶汽车的被测部件端接的每一根线缆,首先利用高斯脉冲生成器生成高斯脉冲干扰信号,将高斯脉冲干扰信号通过传导干扰施加与监测模块注入到线缆中,若被测智能驾驶汽车出现行车状态异常现象,则判断为车辆受到电磁干扰影响,说明被测部件在测试频带内存在敏感频点,继续进行步骤s3-4,否则从线缆处耦合的干扰信号不会对被测部件造成干扰,更换线缆重新测试确定被测部件在测试频带内是否敏感;s3-4:确定被测部件具体的敏感频点和敏感门限电平;利用干扰信号源产生脉冲重复频率为1khz、占空比为50%的脉冲调制的正弦波,正弦波频率为1mhz;将干扰信号通过传导干扰施加与监测模块注入到线缆中,并监测感应电流;在测试频带内对正弦波频率进行扫描,扫描步长设为0.1mhz,观察车辆是否正常工作,若出现行车状态异常现象,则判断为车辆受到了电磁干扰的影响,记录此时的频点为敏感频点并获取敏感门限电平;更换线缆重新测试。
29.实验结果:制动控制器在测试频带内敏感,其在测试过程中出现的敏感现象为:刹车失灵,被测智能驾驶汽车工控机发出刹车指令后,被测智能驾驶汽车反而加速行驶;其敏感频点和敏感门限电平如图5所示。电机在测试频带内不敏感,在步骤s3-3中没有出现行车状态异常现象。
30.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连
接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
31.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、
ꢀ“
上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
32.在本发明中,术语“第一”、“第二”、“第三”、“第四”仅用于描述目的,不能理解为指示或暗示相对重要性。术语“多个”指两个或两个以上,除非另有明确的限定。
33.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
