1.本发明涉及风洞试验技术领域,尤其涉及一种风洞试验气动载荷测量装置及方法。
背景技术:
2.风洞试验中,模型的气动载荷是最普遍、最重要的测量项目之一。目前,风洞内模型的气动载荷通常是通过风洞天平等直接测量手段获取,再结合流场的动压、模型参考面积和参考长度等参数,计算得到模型的气动力系数。这种方式模型与天平直接接触,天平或天平支杆位于流场中,对风洞流场有一定影响,而且对于简单外形模型的气动载荷测量而言,基于风洞天平测量的方式过程较为繁琐且成本较高。
3.因此,针对以上不足,需要提供一种更为简捷地非接触式风洞试验气动载荷测量装置及方法。
技术实现要素:
4.本发明的目的是针对上述至少一部分不足之处,提供一种基于图像处理的非接触式风洞试验气动载荷测量装置及方法,以避免接触式测量引入干扰,同时简化气动载荷测量过程。
5.为了实现上述目的,本发明提供了一种风洞试验气动载荷测量装置,包括:安装模块、圆球模型、图像采集模块和数据处理模块;所述安装模块安装于风洞试验段,用于通过悬线悬吊所述圆球模型于风洞试验段的流场区域中;所述图像采集模块用于从流场的一侧水平拍摄所述圆球模型的图像;所述数据处理模块与所述图像采集模块连接,用于获取不同时刻的图像,确定所述圆球模型的位置并拟合随时间变化的曲线,计算所述圆球模型在流场中的气动载荷。
6.可选地,所述安装模块包括固定架和支撑架;其中,所述支撑架固定于风洞试验段的喷管,位于流场外;所述固定架可移动的设于所述支撑架,位于流场上方,用于通过悬线悬吊所述圆球模型。
7.可选地,所述支撑架包括两根平行的支杆,均开设有用于调节的安装槽;所述固定架的两端分别穿设于两根所述支杆的安装槽内,并能够沿所述安装槽滑动,中段用于设置悬线。
8.可选地,所述圆球模型的重力大于待测量的气动载荷。
9.可选地,所述圆球模型的直径满足风洞试验段的流场堵塞度要求。
10.可选地,该装置还包括背景板;所述背景板设于流场的一侧,用于增强所述图像采集模块拍摄的所述圆球模型的图像的对比度。
11.可选地,所述图像采集模块设于风洞外侧,通过风洞试验段开设的观察窗口拍摄所述圆球模型的图像。
12.本发明还提供了一种风洞试验气动载荷测量方法,采用如上述任一项所述的风洞试验气动载荷测量装置实现,包括如下步骤:确定圆球模型的重量和直径;将所述圆球模型悬吊于风洞试验段内,记录喷管开启前悬线的长度及所述圆球模型的初始位置,并拍摄图像;开启喷管,在不同时刻,拍摄所述圆球模型的图像;基于拍摄的图像,确定所述圆球模型在不同时刻的位置;采用正弦函数拟合至少一个完整周期内所述圆球模型的位置随时间变化的曲线,确定所述圆球模型的平衡位置;基于所述悬线的长度和所述圆球模型的重量、直径、初始位置以及平衡位置,计算气动载荷。
13.可选地,所述基于拍摄的图像,确定所述圆球模型在不同时刻的位置,包括:基于拍摄的图像,确定所述圆球模型的像素直径及球心在不同时刻的像素位置;基于所述圆球模型的直径、像素直径及球心的像素位置,确定所述圆球模型在不同时刻的位置。
14.可选地,计算气动载荷的表达式为:其中,f表示气动载荷,g表示圆球模型的重力,d表示圆球模型的直径,l表示悬线的长度,δx
平衡
表示所述圆球模型的平衡位置相对于初始位置在沿流场方向的x轴上的坐标变化量,δy
平衡
表示所述圆球模型的平衡位置相对于初始位置在沿重力方向的y轴上的坐标变化量。
15.本发明的上述技术方案具有如下优点:本发明提供了一种风洞试验气动载荷测量装置及方法,本发明将圆球模型悬吊于风洞的流场中,并拍摄相关图像,通过处理图像确定风洞试验中圆球模型做类单摆运动的平衡位置,进而基于平衡位置计算风洞流场造成的气动载荷,本发明可实现非接触地测量流场不同位置处的气动载荷,操作简单,易于调节,且测量精度高。
附图说明
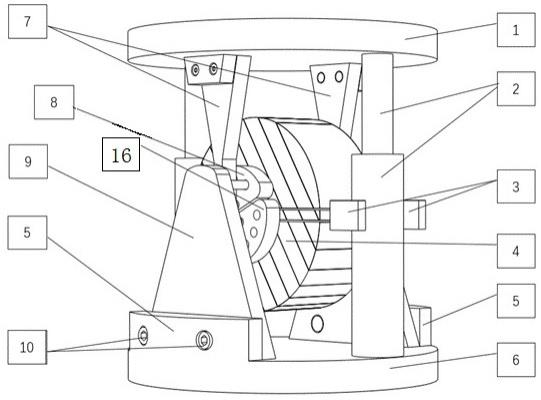
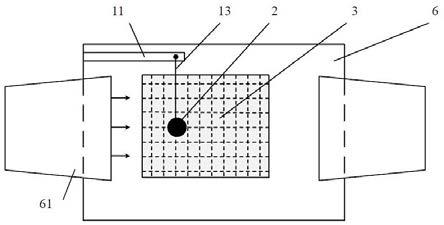
16.图1是本发明实施例中一种风洞试验气动载荷测量装置主视图;图2是本发明实施例中一种风洞试验气动载荷测量装置俯视图;图3是本发明实施例中安装模块悬吊圆球模型的示意图;图4是本发明实施例中一种安装模块的结构示意图;图5是本发明实施例中圆球模型做类单摆运动的示意图;图6是本发明实施例中一种风洞试验气动载荷测量方法的步骤示意图。
17.图中:11:支撑架;12:固定架;13:悬线;2:圆球模型;3:背景板;4:图像采集模块;5:观察窗口;6:风洞试验段;61:喷管。
具体实施方式
18.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如前所述,一般而言,风洞模型的气动载荷是通过风洞天平等直接测量手段获取,这种方式模型与天平直接接触,天平或天平支杆位于流场中,对风洞流场有一定影响,而且对于简单外形模型的气动载荷测量而言,基于风洞天平测量的方式过程较为繁琐且成本较高。随着视觉测量或图像识别测量技术的发展,基于图像采集的非接触式测量手段有了更多应用。基于图像的非接触式测量技术具有对模型干扰小、可重复性高等优势。目前,尚未有一种方式能够基于图像直接计算模型的气动载荷。有鉴于此,本发明提出了一种利用圆球模型类单摆运动规律实现测量气动载荷的装置及方法,通过图像采集得到圆球模型在风洞试验过程中位置变化情况,进行受力分析,计算圆球模型所受的气动载荷。
20.下面描述以上构思的具体实现方式。
21.如图1至图5所示,本发明实施例提供的一种风洞试验气动载荷测量装置(简称该装置),包括安装模块、圆球模型2、图像采集模块4和数据处理模块;具体地,其中:安装模块安装于风洞试验段6,安装模块用于通过悬线13悬吊圆球模型2于风洞试验段6的流场区域中。喷管61开启后,向流场区域吹风,形成试验所需的风洞。悬线13上方悬吊的位置优选可以调节,以便测量流场中不同位置处的气动载荷。圆球模型2的位置优选靠近流场中心线,以便确保测量过程中所受到的气动载荷更加稳定。
22.图像采集模块4用于从风洞试验段6的流场的一侧水平拍摄圆球模型2的图像。由流场的一侧沿水平方向拍摄圆球模型2,圆球模型2在垂直图像采集模块4镜头的平面内,也即图像平面内,做类单摆运动,有利于在处理图像时精确识别圆球模型2的位置。图像采集模块4的图像分辨率影响气动载荷测量结果,图像分辨率越高,圆球模型2的位置定位越准确,测得气动载荷的精度也越高。图像采集模块4可采用可见光摄像机等现有技术,在此不再赘述。
23.数据处理模块与图像采集模块4连接,用于获取图像采集模块4在不同时刻拍摄的图像,基于图像采集模块4拍摄的图像确定圆球模型2在不同时刻的位置,并拟合圆球模型2的位置随时间变化的曲线,基于圆球模型2的位置随时间变化的曲线,计算圆球模型2在流场中的气动载荷。
24.图1示出了从风洞试验段6的流场的一侧水平观察该风洞试验气动载荷测量装置的主视图,图2示出了该装置的俯视图。使用时,在风洞未吹风时,圆球模型2竖直悬吊于喷管61的出口前方,风洞吹风并形成稳定的流场后,圆球模型2受到重力和气动载荷的合力,在流场中位置往复变化,进行周期性的类单摆运动,通过确定圆球模型2在不同时刻的位置,并拟合位置随时间变化的曲线(即位置-时间曲线),能够确定出圆球模型2做类单摆运动的平衡位置,进而可根据平衡位置的受力分析计算出圆球模型2的气动载荷。
25.本发明采用图像处理技术实现了非接触式测量风洞流场中的气动载荷,该方案简单易行,避免了测量仪器对模型及流场环境造成干扰,且可通过提高图像识别精度而提高测量精度,能够便捷地测定流场区域不同位置处的气动载荷,还可以应用于流场校准,例如,可将基于该方法测量得到的圆球气动载荷与数值计算仿真(如cfd方法)得到的圆球气动载荷相比,用于验证该风洞流场的准确性。
26.可选地,安装模块包括固定架12和支撑架11;其中,支撑架11固定于风洞试验段6的喷管61处,位于流场外,用于将固定架12设于喷管61上方;固定架12可移动的设于支撑架11处,位于流场上方,用于通过悬线13悬吊圆球模型2,即,悬线13的下端连接圆球模型2,上端连接固定架12。此部分的方位词“上”、“下”,是指相对于地面而言的方位。
27.进一步地,如图2至图4所示,支撑架11包括两根平行的支杆,两根支杆水平架设于风洞试验段6的喷管61的上方,一端与喷管61固定连接,另一端用于设置固定架12,两根支杆均开设有用于调节的安装槽。固定架12的两端分别穿设于两根支杆的安装槽内,并能够沿安装槽滑动,固定架12的中段用于设置悬线13。优选地,为确保悬线13上端位置不发生变动,固定架12的两端可通过螺纹紧固等方式固定于固定架12。悬线13的长度,以及固定架12上设置悬线13的位置,可根据实际需要调节,优选令圆球模型2的球心接近喷管61的中心线。固定好悬线13及圆球模型2之后,可通过调整固定架12在安装槽中固定的位置,令圆球模型2与喷管61出口之间的距离改变,从而测量不同位置处的气动载荷。
28.为匹配待测量的气动载荷,确保圆球模型2不会被吹飞而影响确定平衡位置,可选地,圆球模型2的重力大于待测量的气动载荷。当圆球模型2的重量足够大,圆球模型2可进行规律性的类单摆运动,否则可能在流场中无规律飘动。
29.考虑到不同风洞的流场堵塞度要求不同,为避免圆球模型2在流场中受到阻尼过大,影响类单摆运动的规律性,或对流场分布造成过大的干扰,圆球模型2的直径应满足风洞试验段的流场堵塞度要求。
30.综合考虑圆球模型2的重量及尺寸(即直径)要求后,圆球模型2的具体材质可根据需要进行选取,在此不再进一步限定。悬线13优选弹性模量较大、强度较高的钢丝,以确保在测量过程中变形尽可能小,当然也可参考实际情况选择其他材质。
31.优选地,为提高拍摄的图像的清晰度,以便更准确地识别圆球模型2的位置,如图1和图2所示,该装置还包括背景板3;背景板3设于流场的一侧,与图像采集模块4分设在圆球模型2的两侧,背景板3用于增强图像采集模块4拍摄的圆球模型2的图像的对比度。背景板3优选安装在风洞试验段6的内壁上,作为拍摄圆球模型2的背景,其颜色可根据圆球模型2的颜色进行调整,例如采用黑色的圆球模型2时,可选择白色等浅色的背景板3,以便识别/观测圆球模型2。
32.可选地,图像采集模块4设于风洞外侧,通过风洞试验段6开设的观察窗口5拍摄圆球模型2的图像。该实施方式中,将图像采集模块4设于风洞外侧,能够避免对流场引入额外的干扰,获得更精准的图像。
33.如图6所示,本发明还提供了一种风洞试验气动载荷测量方法,采用如上述任一项实施方式所述的风洞试验气动载荷测量装置实现,该方法具体包括如下步骤:步骤600,确定圆球模型2的重量和直径d;重量确定后,即可知圆球模型2的重力g;步骤602,通过安装模块及悬线13将圆球模型2悬吊于风洞试验段内,记录喷管61
开启前悬线13的长度l及圆球模型2的初始位置,并拍摄圆球模型2的初始位置对应的图像;例如,可记录圆球模型2与喷管61出口的距离d,结合悬线13的长度l,以确定圆球模型2的初始位置;圆球模型2在风洞中的位置可用球心所在点坐标来表示,所用的坐标系可根据实际情况设置;步骤604,开启喷管61,在风洞试验过程中的不同时刻,拍摄圆球模型2的图像,即,利用图像采集模块获得圆球模型2在运动过程中不同位置对应的图像;步骤606,基于拍摄的图像,确定圆球模型2在不同时刻的位置;步骤608,采用正弦函数拟合至少一个完整周期内圆球模型2的位置随时间变化的曲线,确定圆球模型2的平衡位置;步骤610,基于悬线13的长度和圆球模型2的重量、直径、初始位置及平衡位置,计算气动载荷。
34.优选地,步骤602还包括将图像采集模块4的镜头调节至与圆球模型2的初始位置在同一水平线上,以便拍摄到完整的圆球模型2的图像。
35.优选地,步骤606进一步包括:基于拍摄的图像,确定圆球模型2的像素直径d1及圆球模型2的球心在不同时刻的像素位置(x,y);基于圆球模型2的直径d、圆球模型2的像素直径d1及圆球模型2的球心的像素位置(x,y),确定圆球模型2在不同时刻的位置(x,y)。
36.此实施方式中,可将图像中球心的初始像素位置记为(x0,y0),不同时刻下,球心的像素位置与初始像素位置之间的相对位置记为(δx, δy),实际风洞中圆球模型2的初始位置记为(x0, y0),不同时刻下,圆球模型2的位置与初始位置之间的相对位置记为(δx, δy),则其中δx=δx
×
d/d1,δy=δy
×
d/d1。
37.如图5所示,步骤608中采用正弦函数拟合一个完整周期或多个周期圆球模型2的位置随时间变化的曲线,即可得到圆球模型2做类单摆运动时的平衡位置,图5中以实线圆表示类单摆运动边界位置,以箭头所指的虚线圆表示平衡位置,在平衡位置处,圆球模型2的重力及气动载荷的合力沿悬线13方向。通过记录圆球模型2一个或多个周期内的位置变化,再拟合正弦函数的形式求解,可减少了图像帧频低而造成的位置误差,提高位置的准确性。
38.进一步地,步骤610中计算气动载荷,表达式为:其中,f表示气动载荷,g表示圆球模型的重力,d表示圆球模型的直径,l表示悬线的长度,δx
平衡
表示圆球模型2的平衡位置相对于初始位置在沿流场方向的x轴上的坐标变化量,δy
平衡
表示圆球模型2的平衡位置相对于初始位置在沿重力方向的y轴上的坐标变化量。
39.综上所述,本发明提供了一种风洞试验气动载荷测量方法,通过更换圆球模型,可实现在不同风洞状态和不同气动载荷下的气动载荷测量。同时,该方法采用正弦函数拟合
数据点的方式,减少了测量误差,提高了气动载荷的测量精准度。
40.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。