技术特征:
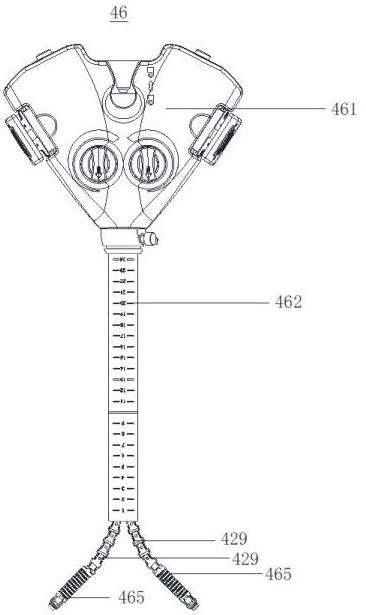
1.一种多功能通道器,其特征在于,所述多功能通道器包括:调节控制盒(461)、入腹钢管组件(462)、可调椎骨节组件(429)和伸缩管组件(465);所述调节控制盒(461)、所述入腹钢管组件(462)、所述可调椎骨节组件(429)和所述伸缩管组件(465)依次连接且相互连通,以形成多个器械通道;所述伸缩管组件(465)包括伸缩管(4651)和弹性件(4652),所述伸缩管(4651)可伸缩地与所述可调椎骨节组件(429)连接且连通,且所述伸缩管(4651)具有伸长状态和缩回状态;所述伸缩管(4651)设置有沿自身长度方向延伸的穿设通道(4655b),所述弹性件(4652)通过所述穿设通道(4655b)沿所述伸缩管(4651)的长度方向贯穿于所述伸缩管(4651),所述弹性件(4652)的两端分别与所述伸缩管(4651)两端固定连接。2.根据权利要求1所述的多功能通道器,其特征在于,所述伸缩管(4651)包括从内向外依次套设的内滑管(4653)、中部滑管(4654)和外滑管(4655),所述内滑管(4653)、所述中部滑管(4654)和所述外滑管(4655)之间滑动连接;所述穿设通道(4655b)包括相连通的穿设间隙(4655c)和穿设通孔(4655d),所述穿设间隙(4655c)形成于所述内滑管(4653)的外壁和所述中部滑管(4654)的内壁之间,所述穿设通孔(4655d)开设于所述外滑管(4655)上,且所述穿设通孔(4655d)外露于处于缩回状态的所述中部滑管(4654);所述弹性件(4652)的一端与所述内滑管(4653)固定连接,所述弹性件(4652)的另一端穿过于所述穿设间隙(4655c)并从所述穿设通孔(4655d)中穿出,且固定于所述外滑管(4655)的外壁。3.根据权利要求2所述的多功能通道器,其特征在于,所述弹性件(4652)包括均采用弹性材料的密封圈(4652a)、第一连接带(4652c)、第一固定圈(4652f);所述第一连接带(4652c)的两端分别与所述密封圈(4652a)和所述第一固定圈(4652f)固定连接;所述密封圈(4652a)套设于所述内滑管(4653)的远离所述中部滑管(4654)的端部开口处,所述第一连接带(4652c)穿设于所述穿设间隙(4655c)并从所述穿设通孔(4655d)中穿出,且所述第一固定圈(4652f)套设于所述外滑管(4655)的外壁。4.根据权利要求3所述的多功能通道器,其特征在于,所述弹性件(4652)还包括第二连接带(4652d)和第二固定圈(4652g),所述第二连接带(4652d)的两端分别与所述密封圈(4652a)和所述第二固定圈(4652g)固定连接,所述第一连接带(4652c)和所述第二连接带(4652d)分别连接于所述密封圈(4652a)的两侧;所述外滑管(4655)上间隔开设有两个所述穿设通孔(4655d),所述内滑管(4653)的外壁和所述中部滑管(4654)的内壁之间形成有两个所述穿设间隙(4655c),两个所述穿设通孔(4655d)和两个所述穿设间隙(4655c)一一对应地连通,以形成两个所述穿设通道(4655b),所述第一连接带(4652c)和所述第二连接带(4652d)分别穿设于两个所述穿设通道(4655b),所述第二固定圈(4652g)套设于所述外滑管(4655)的外周壁。5.根据权利要求4所述的多功能通道器,其特征在于,所述内滑管(4653)的两端分别为第一端(4653a)和第二端(4653b),沿所述内滑管(4653)径向环设有第一凸缘(4653c),所述第一凸缘(4653c)设置于所述内滑管(4653)的第一端(4653a),所述第一凸缘(4653c)的外径大于所述中部滑管(4654)的内径,所述伸缩管(4651)处于缩回状态时,所述第一凸缘(4653c)外露于所述中部滑管(4654)。
6.根据权利要求5所述的多功能通道器,其特征在于,所述内滑管(4653)还包括第一密封限位部(4653d),所述第一密封限位部(4653d)位于所述内滑管(4653)的第一端(4653a)的端面与所述第一凸缘(4653c)之间,所述第一密封限位部(4653d)沿轴向凸出于所述第一凸缘(4653c)的表面;所述密封圈(4652a)套设于所述第一密封限位部(4653d);所述第一凸缘(4653c)上开设有第一通孔(4653f)和第二通孔(4653g),所述第一通孔(4653f)和所述第二通孔(4653g)一一对应地与两个所述穿设间隙(4655c)连通;所述第一连接带(4652c)依次穿设于所述第一通孔(4653f)和其中一个所述穿设通道(4655b);所述第二连接带(4652d)依次穿设于所述第二通孔(4653g)和另一个所述穿设通道(4655b)。7.根据权利要求6所述的多功能通道器,其特征在于,所述外滑管(4655)的外壁开设有密封限位槽(4655a),所述密封限位槽(4655a)围绕所述外滑管(4655)的周向开设,且所述密封限位槽(4655a)设置于所述外滑管(4655)的远离所述第一端(4653a)的一端,所述密封限位槽(4655a)与所述穿设通孔(4655d)连通,所述第一固定圈(4652f)套设于所述密封限位槽(4655a)内,所述第二固定圈(4652g)层叠套设于所述第一固定圈(4652f)上。8.根据权利要求6所述的多功能通道器,其特征在于,所述内滑管(4653)的外壁设置有沿轴向延伸的两个凹槽,所述两个凹槽间隔设置于所述内滑管(4653)的外壁,所述两个凹槽与所述第一通孔(4653f)和所述第二通孔(4653g)一一对应地连通,所述凹槽的槽壁与对应的所述中部滑管(4654)的内壁形成所述穿设间隙(4655c)。9.根据权利要求2所述的多功能通道器,其特征在于,所述中部滑管(4654)包括从内至外依次套设连接的第一连接滑管(4656a)、第二连接滑管(4656b)、第三连接滑管(4656c)
……
第n连接滑管,所述第一连接滑管(4656a)与所述内滑管(4653)滑动连接,所述第n连接滑管与所述外滑管(4655)之间滑动连接。10.根据权利要求9所述的多功能通道器,其特征在于,所述内滑管(4653)的外直径与所述第一连接滑管(4656a)的内直径相适配,所述第一连接滑管(4656a)的外直径与所述第二连接滑管(4656b)的内直径相适配、所述第二连接滑管(4656b)的外直径与所述第三连接滑管(4656c)的内直径相适配
……
所述第n-1连接滑管的外直径与所述第n连接滑管的内直径相适配、所述第n连接滑管的外直径与所述外滑管(4655)的内直径相适配。11.根据权利要求9所述的多功能通道器,其特征在于,所述第一连接滑管(4656a)一端部的内壁设有第一限位凸起(4657a)、所述第二连接滑管(4656b)一端部的内壁设有第二限位凸起(4657b)、所述第三连接滑管(4656c)一端部的内壁设有第三限位凸起(4657c)
……
所述第n连接滑管一端部的内壁设有第n限位凸起,所述外滑管(4655)一端部的内壁设有第n 1限位凸起;沿所述内滑管(4653)外表面轴向设有第一限位凹槽(4658a)、沿所述第一连接滑管(4656a)的外表面轴向设有第二限位凹槽(4658b)、沿所述第三连接滑管(4656b)的外表面轴向设有第三限位凹槽(4658c)、沿所述第三连接滑管(4656c)的外表面轴向设有第四限位凹槽(4658d)
……
沿所述第n连接滑管的外表面轴向设有第n 1限位凹槽;所述第一限位凹槽(4658a)与所述第一限位凸起(4657a)相适配、所述第二限位凹槽(4658b)与第二限位凸起(4657b)相适配、所述第三限位凹槽(4658c)与所述第三限位凸起(4657c)相适配
……
所述第n 1限位凹槽与所述第n 1限位凸起相适配。12.根据权利要求11所述的多功能通道器,其特征在于,所述第一连接滑管(4656a)靠
近所述第一限位凸起(4657a)的一端、所述第二连接滑管(4656b)靠近所述第二限位凸起(4657b)的一端、所述第三连接滑管(4656c)靠近所述第三限位凸起(4657c)的一端
……
所述第n连接滑管靠近第n限位凸起的一端和所述外滑管(4655)靠近所述第n 1限位凸起的一端均设置有径向环设的第二凸缘(4659)。13.根据权利要求12所述的多功能通道器,其特征在于,所述第二限位凹槽(4658b)、第三限位凹槽(4658c)、第四限位凹槽(4658d)和第n 1限位凹槽的一端均与依次位于所述第一连接滑管(4656a)、第二连接滑管(4656b)、第三连接滑管(4656c)
……
第n连接滑管上的所述第二凸缘(4659)连接。14.一种微创手术机器人,其特征在于,包括手术器械(42)和权利要求1-13任一所述的多功能通道器(46);所述手术器械(42)依次贯穿于调节控制盒(461)、入腹钢管组件(462)、可调椎骨节组件(429)和伸缩管组件(465),且所述手术器械(42)的端部与所述伸缩管(4651)套设连接。15.根据权利要求14所述的微创手术机器人,其特征在于,所述伸缩管(4651)的内滑管(4653)与所述手术器械(42)的末端套设连接,且所述末端的外直径与内滑管(4653)的内直径相适配;当所述手术器械(42)处于伸出状态,所述伸缩管(4651)受到所述手术器械(42)的推力,所述伸缩管(4651)沿所述手术器械(42)伸出方向延长至所述手术器械(42)所到达的目标位置,所述弹性件(4652)被拉长;当所述手术器械(42)处于回缩状态,外力撤销,在所述弹性件(4652)的弹性力的作用下,所述伸缩管(4651)切换至所述伸缩管(4651)的所述缩回状态,所述伸缩管(4651)跟随所述手术器械(42)同步回缩。16.根据权利要求15所述的微创手术机器人,其特征在于,所述内滑管(4653)的端部的内壁设置有第一限位卡块(4653h),所述手术器械(42)的末端凸出设置有第二限位卡块(421),所述第一限位卡块(4653h)与所述第二限位卡块(421)限位连接。
技术总结
本发明涉及医疗器械技术领域,特别是涉及一种多功能通道器和微创手术机器人。多功能通道器包括:伸缩管组件,伸缩管组件包括伸缩管和弹性件,伸缩管可伸缩地与可调椎骨节组件连接且连通,且具有伸长状态和缩回状态;弹性件通过穿设通道沿所述伸缩管的长度方向贯穿于伸缩管,弹性件的两端分别与伸缩管两端固定连接。本发明的多功能通道器应用于微创手术机器人,当手术器械处于伸出状态,伸缩管受到手术器械的推力,伸缩管沿手术器械伸出方向延长至手术器械所到达的目标位置,弹性件被拉长;当手术器械处于回缩状态,外力撤销,在弹性件的弹性力的作用下,伸缩管切换至伸缩管的缩回状态,伸缩管跟随手术器械同步回缩。伸缩管跟随手术器械同步回缩。伸缩管跟随手术器械同步回缩。
技术研发人员:王迎智 李浩泽 王干
受保护的技术使用者:极限人工智能(北京)有限公司
技术研发日:2022.03.11
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。