1.本发明属于白酒酿造技术领域,特别涉及一种基于并联机构的酒醅出醅装置。
背景技术:
2.目前酿酒行业主要依靠人工,因此实现酿酒流程的自动化十分必要。地缸发酵是酿酒行业采用的主要发酵方式,酒醅出醅通过由工人使用铁锹完成,而人工出醅的方式耗用的人力多,效率低,因此,设计一种自动化出醅装置可以大幅减轻工人的劳动强度,降低企业的用人成本,提高企业的效益,有利于酿酒整体流程自动化的升级改造。
3.申请号为201210165032.8的中国专利公开了一种白酒酒醅出醅方法及其出醅装置,需要在发酵前预先将该装置放置在地缸内,待发酵结束后将装置与酒醅一起取出。单个装置只能用于一个地缸,无法满足短时间大量地缸的出醅要求。
4.申请号为201811443850.3的中国专利公开了一种白酒制酒用出醅装置,该装置借助顶端的驱动机构可实现末端出醅机构的旋转与上、下往复移动,但末端机构的运动较为单一,只有上、下移动与绕竖直轴的转动,而实际出醅过程中仅靠这两种运动很难达到理想效果。
5.申请号为201821423655.x的中国专利公开了一种地缸固态发酵酒醅的出醅装置,该装置借由导轨及伸缩装置扩大了末端的自由度,而爪状的末端有利于进一步疏松酒醅,便于出醅操作。但该装置得末端自由度较少,运动灵活性角度,对处于地缸边缘的酒醅很难完全取出。
技术实现要素:
6.针对现有技术的不足,本发明拟解决的技术问题是,提供一种基于并联机构的酒醅出醅装置。该装置可以实现出醅机构绕x、z轴的转动和沿y轴的移动,同时可以实现出醅机构的兜料模块绕第四伺服电机和第五伺服电机输出轴的旋转运动,提高了出醅机构的灵活性,提高酒醅出醅的效率。
7.本发明解决所述技术问题采用的技术方案如下:
8.一种基于并联机构的酒醅出醅装置,其特征在于,该装置包括机架、第一~三滑台、末端连接台、单耳连接台、双耳连接台、后三角架、侧三角架、第一~三伺服电机和出醅机构;
9.机架的左、右两侧以及后侧的中心位置分别沿竖直方向设有导轨,每个导轨上均转动安装有丝杠;第一伺服电机、第二伺服电机和第三伺服电机均安装在机架顶部,且分别与三个导轨上的丝杆连接;第一滑台、第二滑台和第三滑台分别滑动安装在机架左侧、后侧以及右侧的丝杠上,第一滑台和第三滑台上分别安装有单耳连接台,第二滑台上安装有双耳连接台;
10.两个侧三脚架上端的顶点分别通过关节球轴承与对应的单耳连接台的连接耳铰接形成球面副,两个侧三脚架下端的两个顶点分别通过两个平行的关节球轴承与末端连接
平台的左、右两侧铰接形成转动副;后三脚架呈倒立状态,后三脚架上端的两个顶点分别通过两个平行的关节球轴承与双耳连接台的两个连接耳铰接形成转动副,后三脚架下端的顶点通过关节球轴承与末端连接台的后侧铰接形成球面副;当末端连接台位于水平位置时,每个侧三角架与竖直方向呈一定夹角;三个导轨、三个滑台、两个侧三脚架、一个后三脚架和末端连接台共同构成2psr-rps并联机构;出醅机构安装在末端连接台上。
11.所述出醅机构包括第五伺服电机、第四伺服电机、链传动模块、兜料模块、支撑架和齿轮传动模块;第五伺服电机安装在末端连接台上,第五伺服电机的输出轴与齿轮传动模块的输入端连接,齿轮传动模块位于末端连接台内部,齿轮传动模块的输出端伸出末端连接台与支撑架连接;支撑架的两侧分别延伸出一个连杆,兜料模块的两端分别与两个连杆的末端连接;第四伺服电机和链传动模块均安装在支撑架上,第四伺服电机的输出轴与链传动模块的输入端连接,兜料模块安装在链传动模块的输出端。
12.所述兜料模块包括主动球面兜料壳、被动球面兜料壳和兜料壳连杆;主动球面兜料壳和被动球面兜料壳的两端分别与两个连杆的末端转动连接,被动球面兜料壳包裹在主动球面兜料壳外侧,主动球面兜料壳和被动球面兜料壳能够相对转动,同时主动球面兜料壳能够带动被动球面兜料壳一起转动;兜料壳连杆的一端与链传动模块的输出端连接,兜料壳连杆的另一端与主动球面兜料壳连接。
13.所述侧三角架和后三角架均为等腰三角形结构,每个三角架的三个顶点处均设有端耳。
14.所述末端连接台为矩形平台,在末端连接台的左、右两侧分别设有两个平行的端耳,末端连接台的后侧设有一个端耳。
15.所述机架为中空的立体框架结构,机架底部四周设有定位插销,机架顶部四周安装有吊环;侧三角架、后三角架、末端连接台和出醅机构均位于机架内侧。
16.与现有技术相比,本发明的有益效果为:
17.(1)两个侧三角架下端的两个顶点与末端连接台的两侧均形成转动副,两个侧三角架上端的顶点与对应的滑台形成球面副,后三脚架上端的两个顶点与双耳连接台形成转动副,后三角架下端顶点与末端连接台形成球面副,这样三个导轨、三个滑台、两个侧三脚架、一个后三脚架和末端连接台共同构成2psr-rps并联机构,使得出醅机构具有沿y轴的移动以及绕x轴和z轴的转动;而出醅机构的兜料模块还具有绕第四伺服电机和第五伺服电机输出轴的旋转运动,这样极大的提高了装置的灵活性,可以根据酒醅的堆料状况调节装置的位置以及兜料模块的角度,从而更好的实现出醅运动,并且出醅时几乎不存在死区,酒醅效率高。同时2psr-rps并联机构的运用,使得装置具有更高的刚度、更大的承载能力、更快的响应速度以及更高的运动精度。
18.(2)本发明的末端连接台由三台伺服电机驱动,通过调节三台伺服电机的转动参数即可实现对出醅机构的运动控制,这使得控制流程简单,更加容易实现。该装置可以大幅减轻工人的劳动强度。
19.(3)本发明的机架、侧三角架和后三角架均采用空心方框焊接而成,大大减轻了装置的重量,节省了制造成本,确保装置可以快速移动,提高了装置连续工作的效率。兜料模块的主动球面兜料壳和被动球面兜料壳均为球面壳体,采用挖取的方式实现酒醅出醅,避免破坏酒醅,有利于提高酒醅的利用率。
附图说明
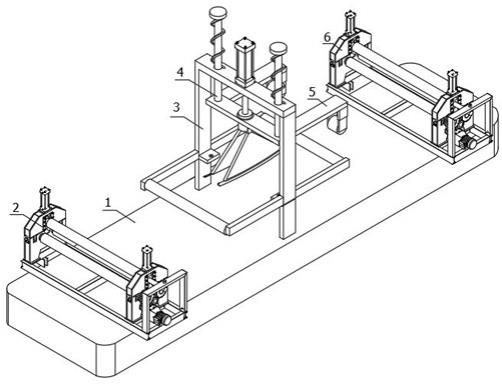
20.图1为本发明的立体结构图;
21.图2为本发明的主视图;
22.图3为本发明的末端连接台及出醅机构的结构图;
23.图4为出醅机构绕x轴转动的示意图;
24.图5为出醅机构绕y轴移动的示意图;
25.图6为出醅机构绕z轴转动的示意图;
26.图7为兜料模块绕y轴转动的示意图;
27.图中:1-机架;2-第一滑台;3-第二滑台;4-末端连接平台;5-出醅机构;6-第一伺服电机;7-第二伺服电机;8-第三伺服电机;9-导轨;10-第三滑台;11-单耳连接台;12-双耳连接台;13-后三脚架;14-侧三脚架;15-第五伺服电机;16-第四伺服电机;17-链传动模块;18-主动球面兜料壳;19-支撑架;20-被动球面兜料壳;21-兜料壳连杆;
28.1-1、定位插销;1-2、吊环;11-1、斜支座;19-1、连杆。
具体实施方式
29.下面将结合实施例及附图进一步对本发明的技术方案进行详细阐述,但并不以此限定本技术的保护范围。
30.如图1~7所示,本发明为一种基于并联机构的酒醅出醅装置(简称装置),该装置包括机架1、第一~三滑台、末端连接台4、单耳连接台11、双耳连接台12、后三角架13、侧三角架14、第一~三伺服电机和出醅机构5;
31.所述机架1为中空的立体框架结构,由若干根空心方管焊接而成;机架1底部四周焊接定位插销1-1,便于装置的定位安装;同时在机架1的顶部四周安装有吊环1-2,使装置可通过起吊设备吊起,便于装置移动;而空心方管的使用不仅降低了成本,还减轻了装置的重量,使得装置移动更加便捷;
32.在机架1的左、右两侧以及后侧的中心位置分别沿竖直方向设有导轨9,每个导轨9上均转动安装有丝杠;第一伺服电机6、第二伺服电机7和第三伺服电机8均安装在机架1顶部,且分别通过联轴器与三个导轨9上的丝杆连接;第一滑台2滑动安装在机架1左侧的丝杠上,第二滑台3滑动安装在机架1后侧的丝杠上,第三滑台10滑动安装在机架1右侧的丝杠上,第一滑台2和第三滑台10上分别安装有单耳连接台11,第二滑台3上安装有双耳连接台12;两个侧三脚架14上端的顶点分别通过关节球轴承与对应的单耳连接台11的连接耳铰接形成球面副,两个侧三脚架14下端的两个顶点分别通过两个平行的关节球轴承与末端连接平台4的左、右两侧铰接形成转动副;后三脚架13呈倒立状态,后三脚架13上端的两个顶点分别通过两个平行的关节球轴承与双耳连接台12的两个连接耳铰接形成转动副,后三脚架13下端的顶点通过关节球轴承与末端连接台4的后侧铰接形成球面副;侧三角架14和后三角架13均为等腰三角形结构,当末端连接台4位于水平位置时,每个侧三角架14与竖直方向呈一定夹角,本实施例中夹角为80
°
;这样,三个导轨9、三个滑台、两个侧三脚架14、一个后三脚架13和末端连接台4共同构成2psr-rps并联机构,末端连接台4相当于2psr-rps并联机构的动平台,两个侧三脚架14和一个后三角架13分别位于2psr-rps并联机构的三条支链上;
33.出醅机构5安装在末端连接台4上,在2psr-rps并联机构的作用下,可以实现出醅机构5绕x、z轴的转动和沿y轴的移动,确保了出醅机构5的灵活性。
34.所述单耳连接台11包含一个斜支座11-1,斜支座11-1的一侧与对应的滑台连接,斜支座11-1的底部设有一个连接耳;双耳连接台12为板状结构,双耳连接台12上设有两个平行的连接耳,分别与后三角架13的两个顶点连接。
35.所述后三脚架13和侧三角架14均采用空心方管焊接而成,每个三角架的中位线处均设有加强梁,用来提高结构强度和刚度;每个三角架的三个顶点处均设有端耳,通过端耳与其余零件连接。
36.所述末端连接台4为矩形平台,在末端连接台4的左、右两侧分别设有两个平行的端耳,方便与对应的侧三角架14连接;末端连接台4的后侧设有一个与后三角架13连接的端耳。
37.所述出醅机构5包括第五伺服电机15、第四伺服电机16、链传动模块17、兜料模块、支撑架19和齿轮传动模块(图中未画出);第五伺服电机15安装在末端连接台4的顶部,第五伺服电机15的输出轴通过联轴器与齿轮传动模块的输入端连接,齿轮传动模块位于末端连接台4内部,齿轮传动模块的输出端伸出末端连接台4并与支撑架19连接;支撑架19的两侧分别延伸出一个连杆19-1,兜料模块的两端分别与两个连杆19-1的末端连接;第四伺服电机16和链传动模块17均安装在支撑架19上,第四伺服电机16的输出轴通过联轴器与链传动模块17的输入端连接,兜料模块安装在链传动模块17的输出端;第五伺服电机15的转矩通过齿轮传动模块传递至支撑架19,使支撑架19转动,进而实现兜料模块以第五伺服电机15输出轴为转动轴的旋转运动;第四伺服电机16的转矩通过链传动模块17传递至兜料模块,实现兜料模块以第四伺服电机16输出轴为转动轴的旋转运动;通过出醅机构5和兜料模块的配合,实现该装置的上料和卸料。
38.所述兜料模块包括主动球面兜料壳18、被动球面兜料壳20和兜料壳连杆21;主动球面兜料壳18和被动球面兜料壳20的两端分别与两个连杆19-1的末端转动连接,被动球面兜料壳20包裹在主动球面兜料壳18外侧,主动球面兜料壳18和被动球面兜料壳20能够相对转动,同时当主动球面兜料壳18转动一定角度后能够带动被动球面兜料壳20一起转动;兜料壳连杆21的一端与链传动模块17的输出端连接,兜料壳连杆21的另一端与主动球面兜料壳18固连,链传动模块17通过兜料壳连杆21实现主动球面兜料壳18的转动。
39.本发明的工作原理和工作流程是:
40.以末端连接台4保持水平,被动球面兜料壳20位于最高位置,被动球面兜料壳20完全包裹主动球面兜料壳18为初始状态;出醅机构5包含绕x、z轴的转动和沿y轴的移动,x轴沿装置的长度方向,y轴位于装置的高度方向,z轴位于装置的宽度方向;
41.沿y轴移动:第一伺服电机6、第二伺服电机7、第三伺服电机8转动相同角度,使得第一滑台2、第二滑台3和第三滑台10沿着各自的导轨9往复移动相同距离,后三脚架13与两个侧三脚架14沿y轴方向平移相同距离,带动末端连接台4沿y轴方向往复平移,进而实现出醅机构5沿y轴移动;
42.绕x轴转动:第一伺服电机6、第三伺服电机8不工作,第二伺服电机7转动,带动第二滑台3沿着对应的导轨9往复移动,从而带动后三脚架13上、下往复移动,而两个侧三脚架14始终静止,这样就会使末端连接台4与后三脚架13的连接位于有向上或向下的运动趋势;
由于后三角架13与末端连接台4、两个侧三脚架14与两个单耳连接台11均采用单点铰接的方式,在运动趋势的作用下,实现末端连接台4绕x轴的转动,进而实现出醅机构5绕x轴转动;
43.绕z轴转动:第二伺服电机7不工作,第一伺服电机6正转,第三伺服电机8反转将会使得第一滑台1向上移动,第三滑台10向下移动,从而使得左侧的侧三脚架14上移,右侧的侧三脚架14下移,这样就使得末端连接台4左侧有向上的运动趋势,右侧有向下的运动趋势,从而实现末端连接台4与出醅机构5绕z轴顺时针(从装置的正视图看)的转动;而第一伺服电机6反转,第三伺服电机8正转,将会使得第一滑台1向下移动,第三滑台10向上移动,使得左侧的侧三脚架14下移,右侧的侧三脚架14上移,这样就使得末端连接台4左侧有向下的运动趋势,右侧有向上的运动趋势,从而实现末端连接台4与出醅机构5绕z轴逆时针的转动。
44.第五伺服电机15的转矩通过齿轮传动模块传递至支撑架19,使支撑架19转动,进而实现兜料模块以第五伺服电机15输出轴为转动轴的旋转运动,即当末端连接台4水平时,兜料模块绕y轴的转动;第四伺服电机16的转矩通过链传动模块17传递至兜料模块,实现兜料模块以第四伺服电机16输出轴为转动轴的旋转运动,即当末端连接台4水平时,兜料模块绕z轴的转动。
45.本发明未述及之处适用于现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。