1.本发明涉及半导体分立器件及ic芯片的电参数测试及分类技术领域,具体为一种适用于切边晶圆的预对准系统。
背景技术:
2.晶圆是指制作硅半导体电路所用的硅晶片,其原始材料是硅,高纯度的多晶硅溶解后掺入硅晶体晶种,然后慢慢拉出,形成圆柱形的单晶硅,硅晶棒在经过研磨,抛光,切片后,形成硅晶圆片,也就是晶圆,国内晶圆生产线以 8英寸和 12 英寸为主,使晶圆上芯片的测试电极对准测试探针是晶圆测试的关键,在分立器件及ic等行业,晶粒的图像具有方向性,这就要求测试探针要和测试电极一一对应,所以晶圆工艺切边的方向定位至关重要。
3.当前的切边晶圆的预对准系统,存在一下不足之处:由于晶圆是硅单晶构成,且硅单晶又是脆性材料,为避免边角崩裂影响晶片强度、破坏晶片表面光洁和对后工序带来污染颗粒,必须用专用的电脑控制设备自动修整晶片边缘形状和外径尺寸,但是在晶圆进行修边的过程中,需要对其边缘的位置进行定位,才能有效的控制晶圆大小的相同性,而市场上的一些探针台设备大都不有具备切边寻找功能,使得晶圆修边的难度增大;而一些具有切边寻找功能的设备,在进行切边时需要进行调整,增加了切边寻找的复杂度,提高了进行操作的难度,使得切边寻找工作,需要经验丰富的工作才能进行操作,大大增加操作的门槛。
技术实现要素:
4.本发明的目的在于提供一种适用于切边晶圆的预对准系统,以解决上述背景技术中提出的相关问题。
5.为实现上述目的,本发明提供如下技术方案:包括底板,所述底板顶部的一侧设有送料立座,所述送料立座的顶部设有圆晶输送组件,所述底板顶部的中间设有气缸立座,所述气缸立座的一端设有圆晶旋转组件,所述底板顶部远离送料立座的一侧设有预对准支座,所述预对准支座的一侧设有弯板,所述弯板的顶部设有光纤座,所述光纤座一侧的中间设有挡块,所述光纤座一侧的顶部和底部分别设有对射传感器。
6.优选的,所述圆晶输送组件由主动带轮、步进电机a、传输圆皮带a、晶圆、从动带轮a、传输圆皮带b、传输板和从动带轮b组成,所述步进电机a位于送料立座一端的中间,所述步进电机a的输出端设有主动带轮,所述送料立座一端的顶部设有传输板,所述传输板两端的一侧对称定轴转动连接有从动带轮a,所述传输板两端的另一侧定轴转动连接有从动带轮b,所述主动带轮与从动带轮a的外侧之间套设有传输圆皮带a,所述从动带轮a与从动带轮b的外侧之间套设有传输圆皮带b,两组所述传输圆皮带b的顶部之间滑动连接有晶圆。
7.优选的,所述圆晶旋转组件由导杆气缸、气缸立座、大同步带轮、旋转接头、预对准新轴座、气缸转接板、同步齿形带、小同步带轮和电机支架组成,所述导杆气缸位于气缸立座的一端,所述导杆气缸的顶部设有气缸转接板,所述气缸转接板的顶部设有预对准新轴
座,所述预对准新轴座的顶部设有旋转接头,所述预对准新轴座顶部的一端设有电机支架,所述电机支架的底部设有步进电机b,所述步进电机b的输出端设有小同步带轮,所述旋转接头的顶部设有大同步带轮,所述小同步带轮和大同步带轮之间套设有同步齿形带,所述大同步带轮的顶部设有预对准吸盘。
8.优选的,所述送料立座一端的顶部设有连接板,且连接板通过锁紧螺栓与送料立座相连,所述传输板与连接板相连接。
9.优选的,所述送料立座一端的中间设有安装孔,且安装孔的内部设有l型板,所述步进电机a与l型板相连接。
10.优选的,所述送料立座、气缸立座和预对准支座的一侧皆设有安装板,且安装板的顶部设有螺孔。
11.优选的,所述挡块的顶部设有弧形导向槽,且晶圆与弧形导向槽相互适配。
12.优选的,所述挡块的顶部均匀设有多组透光孔,且对射传感器与透光孔处于同一平面。
13.优选的,所述弯板和光纤座皆由l型结构制成,且弯板和光纤座的顶部皆设有连接孔,所述弯板和光纤座通过连接螺栓进行连接,且连接螺栓位于连接孔的内部。
14.优选的,所述电机支架顶部的四角处分别设有固定螺栓,且电机支架通过固定螺栓与步进电机b相连。
15.与现有技术相比,本发明提供了一种适用于切边晶圆的预对准系统,具备以下有益效果:1、本发明通过主动带轮、步进电机a、传输圆皮带a、晶圆、从动带轮a、传输圆皮带b、传输板和从动带轮b的配合下,能够将在进行检查时,能够带动晶圆进行移动,使得输送至指定位置处进行检测,进而方便设备进行自动化操作,同时在其输送到指定位置处后,通过挡块的作用下,能够对晶圆的位置进行调整,使得晶圆在到达位置后,能保持在中心位置,进而防止晶圆在输送的过程中出现偏移,影响后续的切边寻找工作。
16.2、本发明通过导杆气缸、气缸立座、大同步带轮、旋转接头、预对准新轴座、气缸转接板、同步齿形带、小同步带轮和电机支架的配合下,在晶圆到达指定位置后,能够自动抬升晶圆并带动其旋转,然后通过对射传感器的作用下,能对切边进行查找,进而记录其边缘的数据,进而实现晶圆切边位置的检测,为后续图形扫正及图像对准工作提供了可靠保障。
附图说明
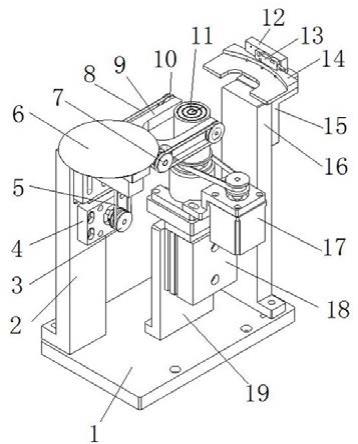
17.图1为本发明的立体图;图2为本发明的主视图;图3为本发明的右侧图;图4为本发明的左侧图;图5为本发明的预对准支座处的侧视图;图6为本发明的预对准吸盘处的立体图;图7为本发明的预对准吸盘处的俯视图。
18.图中:1、底板;2、送料立座;3、主动带轮;4、步进电机a;5、传输圆皮a;6、晶圆;7、从动带轮a;8、传输圆皮带b;9、传输板;10、从动带轮b;11、预对准吸盘;12、光纤座;13、对射传
感器;14、挡块;15、弯板;16、预对准支座;17、步进电机b;18、导杆气缸;19、气缸立座;20、大同步带轮;21、旋转接头;22、预对准新轴座;23、气缸转接板;24、同步齿形带;25、小同步带轮;26、电机支架。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.请参阅图1-7,本发明提供一种技术方案:一种适用于切边晶圆的预对准系统,包括底板1,底板1顶部的一侧设有送料立座2,送料立座2的顶部设有圆晶输送组件,底板1顶部的中间设有气缸立座19,气缸立座19的一端设有圆晶旋转组件,底板1顶部远离送料立座2的一侧设有预对准支座16,预对准支座16的一侧设有弯板15,弯板15的顶部设有光纤座12,光纤座12一侧的中间设有挡块14,能对晶圆6进行限位,防止其发生偏移,光纤座12一侧的顶部和底部分别设有对射传感器13,能够对晶圆6的边缘位置进行检测,方便对其边缘的数据进行记录。
21.作为本实施例的优选方案:圆晶输送组件由主动带轮3、步进电机a4、传输圆皮带a5、晶圆6、从动带轮a7、传输圆皮带b8、传输板9和从动带轮b10组成,步进电机a4位于送料立座2一端的中间,步进电机a4的输出端设有主动带轮3,送料立座2一端的顶部设有传输板9,传输板9两端的一侧对称定轴转动连接有从动带轮a7,传输板9两端的另一侧定轴转动连接有从动带轮b10,主动带轮3与从动带轮a7的外侧之间套设有传输圆皮带a5,从动带轮a7与从动带轮b10的外侧之间套设有传输圆皮带b8,两组传输圆皮带b8的顶部之间滑动连接有晶圆6,能够将在进行检查时,能够带动晶圆6进行移动,使得输送至指定位置处进行检测,进而方便设备进行自动化操作。
22.作为本实施例的优选方案:圆晶旋转组件由导杆气缸18、气缸立座19、大同步带轮20、旋转接头21、预对准新轴座22、气缸转接板23、同步齿形带24、小同步带轮25和电机支架26组成,导杆气缸18位于气缸立座19的一端,导杆气缸18的顶部设有气缸转接板23,气缸转接板23的顶部设有预对准新轴座22,预对准新轴座22的顶部设有旋转接头21,预对准新轴座22顶部的一端设有电机支架26,电机支架26的底部设有步进电机b17,步进电机b17的输出端设有小同步带轮25,旋转接头21的顶部设有大同步带轮20,小同步带轮25和大同步带轮20之间套设有同步齿形带24,大同步带轮20的顶部设有预对准吸盘11,在晶圆到达指定位置后,能够自动抬升晶圆并带动其旋转方便后续对晶圆6的边缘进行检测。
23.作为本实施例的优选方案:送料立座2一端的顶部设有连接板,且连接板通过锁紧螺栓与送料立座2相连,传输板9与连接板相连接,当其内部的器件出现损坏时,方便将其单独卸下进行维修。
24.作为本实施例的优选方案:送料立座2一端的中间设有安装孔,且安装孔的内部设有l型板,步进电机a4与l型板相连接,方便对其进行安装。
25.作为本实施例的优选方案:送料立座2、气缸立座19和预对准支座16的一侧皆设有安装板,且安装板的顶部设有螺孔,使得设备能够进行拼装,提高安装的便利性。
26.作为本实施例的优选方案:挡块14的顶部设有弧形导向槽,且晶圆6与弧形导向槽相互适配,对晶圆6的位置进行导向,防止其发生偏移。
27.作为本实施例的优选方案:挡块14的顶部均匀设有多组透光孔,且对射传感器13与透光孔处于同一平面,使得对射传感器13的光能从挡块14穿出,对晶圆6进行检测。
28.作为本实施例的优选方案:弯板15和光纤座12皆由l型结构制成,且弯板15和光纤座12的顶部皆设有连接孔,弯板15和光纤座12通过连接螺栓进行连接,且连接螺栓位于连接孔的内部,提高连接的稳定性,并且方便进行组装。
29.作为本实施例的优选方案:电机支架26顶部的四角处分别设有固定螺栓,且电机支架26通过固定螺栓与步进电机b17相连,对步进电机b17位置进行固定,防止其自转。
30.实施例1,如图1、2、3、4、6和7所示,当晶圆6并与挡块14的圆弧相吻合而无法继续移动时,导杆气缸18执行伸出的动作,通过气缸转接板23的连接,使得预对准新轴座22、大同步带轮20、预对准吸盘11、小同步带轮25、同步齿形带24、步进电机b17、电机支架26、旋转接头21整体向上运动,预对准吸盘11将待预对准的晶圆6托起,旋转接头21与设备真空管路连接,为预对准吸盘11提供真空负压,通过预对准吸盘11上的真空通道将待预对准的晶圆6牢牢吸附,步进电机b17通过同步齿形带24和预对准吸盘11正、逆时针转动带动待预对准的晶圆6转动。
31.实施例2,如图1、2、3、4和5所示,安装在光纤座12上的两个对射传感器13通过挡块14上的透光孔进行待预对准的晶圆6的切边查找工作,保证预对准后的待预对准的晶圆6的切边方向旋转至同一方向后,导杆气缸18执行缩回的动作,通过气缸转接板23的连接,使得预对准新轴座22、大同步带轮20、预对准吸盘11、小同步带轮25、同步齿形带24、步进电机b17、电机支架26、旋转接头21整体向下运动至初始位置,完成待预对准的晶圆6的预对准工作。
32.工作原理:进行检测时,首先步进电机a4带动主动带轮3转动,通过传传输圆皮带a5带动两个从动带轮a7转动,当机械手将待预对准的晶圆6放置到两组传输圆皮带b8上后,随着两个传输圆皮带b8的转动向前移动,直至待预对准的晶圆6移动到挡块14的硬限位位置;当晶圆6并与挡块14的圆弧相吻合而无法继续移动时,导杆气缸18执行伸出的动作,通过气缸转接板23的连接,使得预对准新轴座22、大同步带轮20、预对准吸盘11、小同步带轮25、同步齿形带24、步进电机b17、电机支架26、旋转接头21整体向上运动,预对准吸盘11将待预对准的晶圆6托起,旋转接头21与设备真空管路连接,为预对准吸盘11提供真空负压,通过预对准吸盘11上的真空通道将待预对准的晶圆6牢牢吸附,步进电机b17通过同步齿形带24和预对准吸盘11正、逆时针转动带动待预对准的晶圆6转动;安装在光纤座12上的两个对射传感器13通过挡块14上的透光孔进行待预对准的晶圆6的切边查找工作,保证预对准后的待预对准的晶圆6的切边方向旋转至同一方向后,导杆气缸18执行缩回的动作,通过气缸转接板23的连接,使得预对准新轴座22、大同步带轮20、预对准吸盘11、小同步带轮25、同步齿形带24、步进电机b17、电机支架26、旋转接头21整体向下运动至初始位置,完成待预对准的晶圆6的预对准工作。
33.最后应当说明的是,以上内容仅用以说明本发明的技术方案,而非对本发明保护范围的限制,本领域的普通技术人员对本发明的技术方案进行的简单修改或者等同替换,
均不脱离本发明技术方案的实质和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。