1.本发明属于激光雷达技术领域,尤其是涉及一种探测水体生物光学特性剖面的激光雷达及方法。
背景技术:
2.海洋生态系统在全球气候变化和生态环境保护领域具有重要的作用,浮游植物是海洋生态系统的主要生产者,其净光合作用的固碳量约等于所有陆生植物固碳量的总和;湖泊生态系统在调节区域气候和保持区域生态平衡方面扮演着重要的角色,同时也是重要的淡水资源库,水体的富营养化会导致藻华现象的爆发,污染水体环境。
3.叶绿素是浮游植物进行光合作用的主要色素,用于表征浮游植物的生物量。目前探测叶绿素的手段主要有生物化学方法、原位仪器测量、被动遥感和主动遥感。其中,激光雷达作为一种主动式光学遥感设备,可用于探测水体的生物光学特性剖面,对上层海洋垂直分布结构进行遥感测量,具备高时空分辨率、昼夜连续观测、全球尺度测量等优势。根据水体组成成分,可以将水体分为一类水体和二类水体,一类水体中浮游植物是导致水体光学特性变化的主要原因。目前,结合一类水体的生物光学模型,激光雷达已成功应用于生物量探测、浮游植物层分布等方面的研究。然而,二类水体的光学特性不仅受到浮游植物和相关颗粒的影响,还与无机悬浮物颗粒与有色溶解有机物(cdom)有关。这对激光雷达反演水体生物光学特性剖面造成了困难。
4.公开号为cn110673157a的中国专利文献公开了一种探测海洋光学参数的高光谱分辨率激光雷达系统,系统具有探测海洋中偏振信息、叶绿素含量、浮游植物和海水温度四个通道,能够对这些参数进行探测;公开号为cn105486664a的中国专利文献公开了一种探测海洋浮游植物生物量和颗粒物有机碳的装置及方法,基于高光谱分辨率激光雷达,利用海洋浮游植物生物量和poc反演方法,能够实现浮游植物生物量和poc的同步反演。然而,高光谱分辨率激光雷达的结构复杂,且当水体中存在无机悬浮颗粒物和cdom时,单波长激光雷达就无法准确获得叶绿素浓度。现有的研究提出采用多波长激光雷达来解决单波长激光雷达无法准确反演叶绿素浓度的问题,如公开号为cn112034480a的中国专利文献公开了一种双波长海洋激光雷达探测的波长择优方法,基于双波长海洋高光谱分辨率激光雷达,根据水体吸收公式建立了叶绿素浓度和cdom浓度的反演模型,通过建立参数相对误差的评价方法,对激光雷达的两个波长进行择优,获得最佳的叶绿素和cdom吸收系数反演模型。然而,这种方法讨论的双波长激光雷达对激光器提出了较高的要求,系统结构更为复杂。
5.因此,亟需提供一种结构简单且能够高精度探测水体生物光学特性剖面的激光雷达及方法。
技术实现要素:
6.为解决现有技术存在的不足,本发明提供了一种探测水体生物光学特性剖面的激光雷达及方法,可以实现生物光学特性剖面的快速、精确探测。
7.一种探测水体生物光学特性剖面的激光雷达,其特征在于,包括激光发射系统、四通道信号接收系统和数据采集处理系统;
8.所述的激光发射系统包括固体脉冲激光器、扩束镜与格兰激光棱镜;其中,固体脉冲激光器用于向水体发射脉冲激光,扩束镜用于调整脉冲激光发散角,格兰激光棱镜用于提高出射脉冲激光的偏振度;
9.所述的四通道信号接收系统包括四个可拆卸式的接收通道,每个接收通道均包括望远镜、视场光阑、会聚透镜、干涉滤光片、光电探测器,其中,第一接收通道和第四接收通道还包括线偏振片模块;线偏振片模块用于调节回波信号的偏振方向,望远镜用于收集来自水体的回波光信号,视场光阑用于调整视场角,会聚透镜用于准直接收的光信号,干涉滤光片用于抑制目标波长以外的光信号,光电探测器用于将收集到的光信号转化为电信号;
10.所述的数据采集处理系统包括数据采集卡和计算机;其中,数据采集卡用于采集来自激光发射系统的光触发信号和来自四通道接收系统的回波模拟电信号,并将模拟电信号转化为数字电信号,计算机用于对激光雷达各模块实时调控以及实时反演水体叶绿素浓度。
11.进一步地,所述的激光发射系统发射光路的光轴和四通道信号接收系统四个接收通道的光轴相邻且平行;所述格兰激光棱镜的出光面平行于水平面,扩束镜的出光面平行于格兰激光棱镜的入光面,固体脉冲激光器的出光面平行于扩束镜的入光面;
12.四通道信号接收系统中望远镜的入光面平行于水平面,线偏振模块设置于第一接收通道和第四接收通道的望远镜入光面下方,视场光阑中心设置于望远镜和会聚透镜焦平面,会聚透镜设置于视场光阑上方,干涉滤光片设置于会聚透镜上方,光电探测器设置于干涉滤光片上方;
13.数据采集处理系统中,数据采集卡通过同轴电缆连接四通道信号接收系统的四个光电探测器,计算机通过电线连接数据采集卡。
14.进一步地,所述的固体脉冲激光器采用工作波长为532nm、单脉冲能量不小于5mj、脉冲宽度不大于10ns的固体脉冲激光器;所述的扩束镜采用抗强激光扩束镜。
15.所述的四个接收通道的视场角设置为不小于200mrad;第一接收通道和第四接收通道中的线偏振模块可360
°
旋转且带有刻度;
16.第一接收通道和第四接收通道中干涉滤光片的中心波长为532nm,带宽不超过10nm,所在接收通道称为平行偏振通道和垂直偏振通道;第二接收通道和第三接收通道中干涉滤光片的中心波长分别为650nm和685nm,带宽不超过20nm,所在接收通道称为拉曼通道和荧光通道;
17.所述的光电探测器采用光谱响应范围在185~730nm、典型阴极光照灵敏度不低于120μa/lm且上升时间不超过2.2ns的光电倍增管;
18.所述数据采集卡的采样率不低于400msa/s,且量化位数不低于12位。
19.本发明还提供了一种探测水体生物光学特性剖面的方法,采用上述的激光雷达,其中,深度为z处的水体产生的激光雷达信号在经过环境参数、系统参数与距离平方校正后,表示为
[0020][0021]
其中,b表示经过系统环境参数与距离平方校正后的激光雷达信号,下标
⊥
、||、r、f分别表示垂直偏振通道、平行偏振通道、拉曼通道和荧光通道,β表示180
°
体散射函数,k
lidar
表示激光雷达衰减系数,上标650、685表示相应的波长,没有上标时表示波长为532nm;
[0022]
具体包括以下步骤:
[0023]
步骤s1,对激光雷达探测水体表层叶绿素浓度的比例系数a1进行定标,将多组实验室荧光法探测得到的水表叶绿素浓度chl(0)和在相同区域探测到的激光雷达荧光通道信号水表值bf(0)与拉曼通道信号水表值br(0)的比值进行线性拟合,得到比例系数a1;
[0024]
步骤s2,采用反演算法对激光雷达的拉曼通道信号进行反演,得到水体表面的颗粒物漫射衰减系数k
d,p
(0),对拉曼通道信号bf与平行偏振通道和垂直偏振通道信号之和bc=b
||
b
⊥
进行定标,得到颗粒物180
°
体散射函数β
p
(0)和比例系数a2,进而得到水体表面的颗粒物激光雷达比r(0),表示为
[0025][0026]
步骤s3,由激光雷达荧光信号和拉曼信号及步骤s1得到的比例系数a1确定探测区域水体表层的叶绿素浓度chl(0),根据一类水体生物光学模型得到k
d,chl
(0),其中,k
d,chl
是由叶绿素贡献的漫射衰减系数;
[0027]
步骤s4,将步骤s2得到的水体表层颗粒物漫射衰减系数k
d,p
(0)和颗粒物激光雷达比r(0)作为边界条件,利用反演算法得到k
d,p
(z)、β
p
(z)和b
bp
(z),完成对水体光学特性剖面的探测;
[0028]
步骤s5,假设激光雷达探测到的颗粒物漫射衰减系数k
d,p
(z)中叶绿素的贡献k
d,chl
(z)随深度不发生改变,采用步骤s2得到的k
d,p
(0)、步骤s3得到的k
d,chl
(0)和步骤s5得到颗粒物漫射衰减系数k
d,p
(z)得到叶绿素贡献的漫射衰减系数k
d,chl
(z),利用一类水体生物光学模型和k
d,chl
(z)得到水体叶绿素浓度chl(z),完成对水体生物特性剖面的探测。
[0029]
进一步地,步骤s1中,近水面处,荧光信号和拉曼信号的比值近似为叶绿素浓度的线性函数,表示为
[0030][0031]
其中,a1为与环境参数、系统参数相关的常数。
[0032]
步骤s2中,视场角足够大时,激光雷达衰减系数k
lidar
近似为漫射衰减系数kd;拉曼
通道探测到的颗粒物漫射衰减系数表示为
[0033][0034]
其中,k
d,w
为纯水在532nm的漫射衰减系数,为纯水在650nm的漫射衰减系数,为纯水在650nm的漫射衰减系数,为颗粒物在650nm的漫射衰减系数;
[0035]
颗粒物180
°
体散射函数β
p
近似正比于米散射和拉曼散射强度之比,表示为
[0036][0037]
其中,a2为与环境参数、系统参数相关的常数。
[0038]
步骤s3中,一类水体生物光学模型表示为
[0039]kd,chl
(z)=χchl(z)e,
[0040]
其中,χ和e为与波长相关的参数。
[0041]
步骤s4中,采用的反演方法是fernald前向算法,漫射衰减系数kd(z)表示为
[0042][0043]
其中,rs为颗粒物激光雷达比r与水分子激光雷达比rw之比,zc为边界深度,φ(z)表示为
[0044][0045]
颗粒物180
°
体散射函数β
p
(z)表示为
[0046][0047]
颗粒物后向散射系数b
bp
和颗粒物180
°
体散射函数β
p
(z)的关系表示为
[0048]bbp
(z)=2πχ
p
(π)β
p
(z),
[0049]
其中,χ
p
(π)为后向散射角为180
°
时的转换因子。
[0050]
步骤s5中,水体叶绿素浓度chl(z)表示为
[0051][0052]
与现有技术相比,本发明具有以下有益效果:
[0053]
本发明采用工作在蓝绿波段的四通道激光雷达,建立适用于复杂水体的生物光学特性剖面反演方法,拓展激光雷达遥测生物光学特性剖面的应用场景,提高复杂水体叶绿素的反演精度。克服了经典生物光学模型中没有考虑悬浮无机物和cdom的不足,通过建立
适用于复杂水体的生物光学特性剖面反演算法,进行定标实验后就可以对水体的生物光学特性进行大范围、高空间分辨率的探测,获得水体的生物光学特性剖面。
附图说明
[0054]
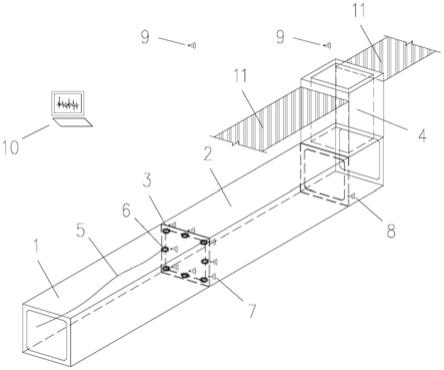
图1为本发明一种探测水体生物光学特性剖面的激光雷达的结构示意图;
[0055]
图2为本发明探测生物光学特性剖面的方法流程图;
[0056]
图3为本发明实施例中荧光拉曼比和实验室结果的拟合结果;
[0057]
图4为本发明实施例中叶绿素反演结果与原位探测结果的比对图。
具体实施方式
[0058]
下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
[0059]
如图1所示,一种探测水体生物光学特性剖面的激光雷达,包括激光发射系统1、四通道信号接收系统2和数据采集处理系统3,激光发射系统1用于发射激光脉冲;四通道信号接收系统2用于接收来自水体包含不同波长、偏振信息的回波信号并转化为电信号,数据采集处理系统3用于采集和处理由四通道接收系统2接收的电信号。
[0060]
激光发射系统1包括固体脉冲激光器1-1、扩束镜1-2与格兰激光棱镜1-3。格兰激光棱镜1-3的出光面平行于水平面设置,扩束镜1-2的出光面平行于格兰激光棱镜的入光面设置,固体脉冲激光器1-1的出光面平行于扩束镜的入光面设置。
[0061]
四通道信号接收系统2包括四个可拆卸式的接收通道,分别设置为第一接收通道2-1、第二接收通道2-2、第三接收通道2-3和第四接收通道2-4;其中,第一接收通道2-1包括第一线偏振片模块2-1-1、第一望远镜2-1-2、第一视场光阑2-1-3、第一会聚透镜2-1-4、第一干涉滤光片2-1-5、第一光电探测器2-1-6。第二接收通道2-2包括第二望远镜2-2-1、第二视场光阑2-2-2、第二会聚透镜2-2-3、第二干涉滤光片2-2-4、第二光电探测器2-2-5。第三接收通道2-3包括第三望远镜2-3-1、第三视场光阑2-3-2、第三会聚透镜2-3-3、第三干涉滤光片2-3-4、第三光电探测器2-3-5。第四接收通道2-4包括第二线偏振片模块2-4-1、第四望远镜2-4-2、第四视场光阑2-4-3、第四会聚透镜2-4-4、第四干涉滤光片2-4-5、第四光电探测器2-4-6。各接收通道中望远镜的入光面平行于水平面设置,线偏振模块设置于第一接收通道和第四接收通道的望远镜入光面下方,视场光阑中心设置于望远镜和会聚透镜焦平面,会聚透镜设置于视场光阑上方,干涉滤光片设置于会聚透镜上方,光电探测器设置于干涉滤光片上方,接收通道的光轴与发射通道的光轴平行且相邻。
[0062]
数据采集处理系统3包括数据采集卡3-1和计算机3-2。数据采集处理系统3中数据采集卡3-1通过同轴电缆连接四通道信号接收系统的四个光电探测器,计算机3-2通过电线连接数据采集卡3-1。
[0063]
本实施例中,固体脉冲激光器采用工作波长为532nm、单脉冲能量不小于5mj、脉冲宽度不大于10ns的固体脉冲激光器,例如奥地利montfort laser公司的半导体泵浦激光器,工作波长为531.7nm,单脉冲能量10mj,脉冲宽度3ns。
[0064]
扩束镜采用抗强激光扩束镜,例如美国thorlabs公司的be02-532型号高功率扩束器,3倍扩束。
[0065]
四个接收通道的视场角设置为不小于200mrad,选择合适的参数确定望远镜、视场光阑和会聚透镜的设计。
[0066]
线偏振模块采用可360
°
旋转且带有刻度的线偏振模块,例如中国麓邦科技公司的flp20-vis型号线性薄膜偏振片和rm1型号的旋转安装座。
[0067]
第一干涉滤光片和第四干涉滤光片采用中心波长为532nm且带宽不超过10nm的干涉滤光片,例如中国麓邦科技公司的mbf03-532滤光片,中心波长532nm,带宽6nm;第二干涉滤光片(2-2-4)和第三干涉滤光片(2-3-4)分别采用中心波长为650nm和685nm且带宽不超过20nm的干涉滤光片,例如美国thorlabs公司的fl650-10型号和fl680-10型号滤光片,中心波长分别为650nm和680nm,带宽均为20nm。
[0068]
光电探测器采用光谱响应范围在185~730nm、典型阴极光照灵敏度不低于120μa/lm且上升时间不超过2.2ns的光电倍增管,例如日本滨松光子公司的r7518型号光电倍增管,光谱响应范围在185~730nm,典型阴极光照灵敏度为130μa/lm,上升时间为2.2ns。
[0069]
数据采集卡采用采样率不低于400msa/s且量化位数不低于12位的数据采集卡,例如德国spectrum的m4i.4481-x8高速数据采集卡,采样率为400msa/s,量化位数为14位。
[0070]
基于上述探测水体生物光学特性剖面的激光雷达,探测生物光学特性剖面的方法流程如图2所示,激光雷达向水体发射脉冲激光,通过设置不同状态的偏振片和不同中心波长的干涉滤光片,接收系统分别接收到平行偏振信号b
||
、荧光信号bf、拉曼信号br和垂直偏振信号b
||
;进一步,进行定标实验,得到水体表层荧光信号拉曼信号的比值bf(0)/br(0)与叶绿素chl(0)的比例系数a1、水体表层平行偏振通道和垂直偏振通道信号之和bc(0)=b
||
(0) b
⊥
(0)与拉曼信号br(0)的比值bc(0)/br(0)和颗粒物180
°
体散射函数β
p
(0)的比例系数a2、水体表层650nm的颗粒物漫射衰减系数和532nm的颗粒物漫射衰减系数k
d,p
(0)的比例系数a3;采用水体表层的荧光信号、拉曼信号、平行偏振信号与垂直偏振信号之和获得光学参数的边界条件k
d,p
(0)、k
d,chl
(0)、β
p
(0)、r(0),进而反演得到水体的生物光学特征剖面。
[0071]
深度为z处的水体产生的激光雷达信号在经过环境参数、系统参数与距离平方校正后,可以表示为
[0072][0073]
其中,b表示经过系统环境参数与距离平方校正后的激光雷达信号,下标
⊥
、||、r、f分别表示垂直偏振通道、平行偏振通道、拉曼通道和荧光通道,β表示180
°
体散射函数,k
lidar
表示激光雷达衰减系数,上标650、685表示相应的波长,没有上标时表示波长为532nm。
[0074]
通过以下步骤实现对生物光学特性剖面的反演探测:
[0075]
第一步,如图3所示,对激光雷达探测水体表层叶绿素浓度的比例系数a1进行定标,受限于信号的信噪比,近水面处,荧光信号和拉曼信号的比值可以近似为叶绿素浓度的线性函数,表示为
[0076][0077]
将多组实验室荧光法探测得到的水表叶绿素浓度chl(0)和在相同区域探测到的激光雷达荧光通道信号水表值bf(0)与拉曼通道信号水表值br(0)的比值进行线性拟合,得到比例系数a1,可决系数达到0.9。
[0078]
第二步,对平行偏振通道和垂直偏振通道信号之和bc=b
||
b
⊥
与拉曼通道信号bf之比进行定标,用原位仪器获得多组颗粒物180
°
体散射函数β
p
,其近似正比于米散射和拉曼散射强度之比,表示为
[0079][0080]
对650nm的漫射衰减系数和532nm的漫射衰减系数k
d,w
之比a3进行定标,在同一水域a3近似为常数,用原位仪器获得多组与k
d,w
之比,取均值得到比例系数a3。
[0081]
第三步,获得反演算法的边界条件。采用反演算法对激光雷达的拉曼通道信号进行反演,视场角足够大时,激光雷达衰减系数k
lidar
近似为漫射衰减系数kd,拉曼通道探测到的颗粒物漫射衰减系数表示为
[0082][0083]
其中,k
d,w
为纯水在532nm的漫射衰减系数,为0.045m-1
,为纯水在650nm的漫射衰减系数,为0.34m-1
。
[0084]
根据式(3)得到水体表面的颗粒物180
°
体散射函数β
p
(0),根据式(4)得到水体表面的颗粒物漫射衰减系数k
d,p
(0),进而得到水体表面的颗粒物激光雷达比r(0),表示为
[0085][0086]
采用激光雷达荧光信号和拉曼信号及比例系数a1,确定探测区域水体表层的叶绿素浓度chl(0),根据一类水体生物光学模型得到k
d,chl
(0),其中,k
d,chl
是由叶绿素贡献的漫射衰减系数。一类水体生物光学模型表示为
[0087]kd,chl
(z)=χchl(z)e,
ꢀꢀꢀ
(6)
[0088]
其中,χ和e为与波长相关的参数,在532nm下,χ为0.0474,e为0.6667。
[0089]
第四步,将水体表层颗粒物漫射衰减系数k
d,p
(0)和颗粒物激光雷达比r(0)作为边界条件,采用fernald前向算法,对k
d,p
(z)和β
p
(z)进行反演。漫射衰减系数kd(z)表示为
[0090][0091]
其中,rs为颗粒物激光雷达比r与水分子激光雷达比rw之比,zc为边界深度,φ(z)表示为
[0092][0093]
颗粒物180
°
体散射函数β
p
(z)表示为
[0094][0095]
颗粒物后向散射系数b
bp
和颗粒物180
°
体散射函数β
p
(z)的关系表示为
[0096]bbp
(z)=2πχ
p
(π)β
p
(z),
ꢀꢀꢀ
(10)
[0097]
其中,χ
p
(π)为后向散射角为180
°
时的转换因子,在本实施例中,χ
p
(π)为1。
[0098]
第五步,假设激光雷达探测到的颗粒物漫射衰减系数k
d,p
(z)中叶绿素的贡献k
d,chl
(z)随深度不发生改变,采用第三步得到的k
d,p
(0)、k
d,chl
(0)和第四步得到k
d,p
(z),计算叶绿素贡献的漫射衰减系数k
d,chl
(z)。利用一类水体生物光学模型和k
d,chl
(z)得到水体叶绿素浓度chl(z),水体叶绿素浓度chl(z)表示为
[0099][0100]
依据实施例的反演得到的叶绿素浓度如图4所示,其中实线表示激光雷达反演得到的叶绿素浓度,虚线表示原位仪器探测到的叶绿素浓度,二者的吻合程度较好,说明反演方法是行之有效的。
[0101]
在本实施例中,利用本发明的探测水体生物光学特性剖面的激光雷达及方法,实现了对水体表观光学特性k
d,p
、β
p
和叶绿素浓度剖面的探测反演,与原位仪器探测结果对比情况良好,验证了本发明的有效性。
[0102]
以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。