1.本发明涉及消防安全装置技术领域,具体为一种带有自动灭火装置的防爆机器人。
背景技术:
2.现在的社会生活中,很多人都住在楼房中,一旦高楼失火,大多数靠消防员冲到高空去灭火,有的冲入火场,往往会危及到消防员的个人安全,而且火势有时候很难以控制,甚至会有煤气罐爆炸的情况发生,对消防员以及现场的受灾人员的人身安全造成了极大的威胁,这时候就需要使用到带有自动灭火装置的防爆机器人。
3.而现有的带有自动灭火装置的防爆机器人结构功能较为单一,现有的灭火机器人不能调节灭火喷头的高度与角度,且喷射范围固定,不能有效增加喷头的喷射范围,灭火效果较差,且在防爆机器人在上坡或下坡过程中容易导致翻转的情况发生,进而影响带有自动灭火装置的防爆机器人的正常工作,因此需要提供一种带有自动灭火装置的防爆机器人以解决上述问题。
技术实现要素:
4.(一)要解决的技术问题
5.针对现有技术的不足,本发明公开了一种带有自动灭火装置的防爆机器人,以解决上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种带有自动灭火装置的防爆机器人,包括:机器人主体与角度调节组件,所述机器人主体两端活动设置有驱动齿轮,所述驱动齿轮外侧活动设置有履带,所述机器人主体上表面一端固定设置有灭火剂储存箱,所述机器人主体上表面前端固定设置有固定盒,所述固定盒朝向所述防爆机器人前进方向的表面固定设置有距离传感器和火焰传感器,所述固定盒顶部表面中端固定设置有摄像头,所述机器人主体顶部开设有安装槽,所述安装槽内设置有高度调节组件,所述高度调节组件上端活动设置有安装板,所述角度调节组件设置于安装板上端表面,所述角度调节组件包括第一支撑架、驱动电机、第二支撑架,所述第二支撑架上端通过销轴活动连接灭火管的后端,所述灭火管道前端固定设置有灭火剂喷头,所述灭火管的后端与灭火剂储存箱之间连接有灭火剂流通管道。
8.优选的,所述高度调节组件包括电机、双头螺杆与螺母件,所述双头螺杆一端与电机输出端固定连接,所述螺母件与双头螺杆螺纹连接,所述螺母件上端活动设置有支撑杆,所述支撑杆上端与安装板下端表面活动连接。
9.优选的,所述第一支撑架上端活动设置有转动轴,所述转动轴一端穿过第一支撑架侧壁与驱动电机输出端固定连接,所述转动轴中端外侧固定套设有凸轮。
10.优选的,所述灭火管靠近灭火剂喷头一端下方通过延伸杆活动设置有从动轮,所
述从动轮下端与凸轮上边缘滑动接触,所述安装板上端表面中端固定设置有弹性板。
11.优选的,所述弹性板上端表面固定设置有复位弹簧,所述复位弹簧上端固定设置有u型卡件,所述u型卡件通过限位轴与灭火管活动连接。
12.优选的,所述灭火剂储存箱上端表面一端固定设置有进料口,所述灭火剂储存箱上端表面远离进料口一侧开设有收纳槽,所述灭火剂储存箱的收纳槽内设置有收纳组件。
13.优选的,所述收纳组件包括安装座、收卷辊、安装框与驱动轴,所述收卷辊固定套设于驱动轴外表面,所述灭火剂流通管道缠绕于收卷辊外表面,所述驱动轴一端穿过安装座侧壁插入安装框内部。
14.优选的,所述安装框内部驱动轴外表面固定套设有斜齿环,所述斜齿环外表面等距离设置有若干斜齿,所述斜齿环外侧活动设置有弹性棘轮环,所述弹性棘轮环内侧等距离设置有若干棘齿。
15.优选的,所述弹性棘轮环一侧设置有弹片,所述斜齿环一侧驱动轴上固定设置有固定块,所述固定块上端与弹片中心端固定连接,所述弹片外端部与安装框内部侧壁固定连接。
16.优选的,所述机器人主体两侧上端均固定设置有限位挡板,所述限位挡板内侧活动设置有活动杆,所述活动杆下端活动设置有支撑滚轮。
17.(三)有益效果
18.本发明的有益效果是:
19.1、该带有自动灭火装置的防爆机器人,通过电机工作有效带动双头螺杆转动,通过双头螺杆转动有效实现螺母件顺着双头螺杆水平方向移动,相互靠近或者相互远离,当两个螺母件相互靠近时,有效实现支撑杆端部相互靠近,进而支撑杆上端有效支撑起安装板,有效实现对灭火剂喷头高度的有效调节。
20.2、该带有自动灭火装置的防爆机器人,通过驱动电机工作有效带动转动轴转动,通过转动轴转动,有效带动凸轮同步转动,当凸轮凸出端与从动轮接触时,有效通过从动轮顶起灭火管前端,实现对灭火剂喷头角度的有效增加,当凸轮凸出端远离从动轮时,有效实现灭火剂喷头角度的有效降低。
21.3、该带有自动灭火装置的防爆机器人,当该带有自动灭火装置的防爆机器人在上坡或下坡过程中,通过活动杆在重力作用下进行位置偏移,同时限位挡板有效限制活动杆的位置,支撑滚轮有效对机器人主体端部起到支撑作用,避免该带有自动灭火装置的防爆机器人出现翻转的情况。。
附图说明
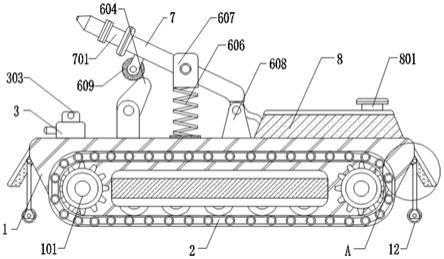
22.图1为本发明主体结构侧视图;
23.图2为本发明主体俯视图的剖视图;
24.图3为本发明高度调节组件工作原理示意图;
25.图4为本发明安装框侧视图的剖视图;
26.图5为本发明图1中a处结构的放大示意图;
27.图6为本发明图2中b处结构的放大示意图;
28.图7为本发明图4中c处结构的放大示意图。
29.【附图标记说明】
30.1:机器人主体;101:驱动齿轮;102:安装槽;
31.2:履带;
32.3:固定盒;301:距离传感器;302:火焰传感器;303:摄像头;
33.4:安装板;
34.5:高度调节组件;501:双头螺杆;502:螺母件;503:支撑杆;
35.6:角度调节组件;601:第一支撑架;602:驱动电机;603:转动轴;604:凸轮;605:弹性板;606:复位弹簧;607:u型卡件;608:第二支撑架;609:从动轮;
36.7:灭火管;701:灭火剂喷头;
37.8:灭火剂储存箱;801:进料口;
38.9:收纳组件;901:收卷辊;902:安装框;903:驱动轴;904:弹性棘轮环;905:固定块;906:斜齿环;907:弹片;
39.10:限位挡板;
40.11:活动杆;
41.12:支撑滚轮;
42.13:灭火剂流通管道。
具体实施方式
43.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
44.一种带有自动灭火装置的防爆机器人,如图1-7所示,包括机器人主体1与角度调节组件6,机器人主体1两端活动设置有驱动齿轮101,驱动齿轮101外侧活动设置有履带2,机器人主体1上表面一端固定设置有灭火剂储存箱8,机器人主体1上表面另一端固定设置有固定盒3,固定盒3朝向所述防爆机器人前进方向的表面固定设置有距离传感器301和火焰传感器302,固定盒3顶部表面中端固定设置有摄像头303,机器人主体1顶部开设有安装槽102,安装槽102内设置有高度调节组件5,高度调节组件5上端活动设置有安装板4,角度调节组件6设置于安装板4上端表面,角度调节组件6包括第一支撑架601、驱动电机602、第二支撑架608,第二支撑架608上端通过销轴活动连接有灭火管7,灭火管道7前端固定设置有灭火剂喷头701,灭火管7的后端与灭火剂储存箱8之间连接有灭火剂流通管道13。
45.根据附图3所示,高度调节组件5包括电机、双头螺杆501与螺母件502,双头螺杆501一端与电机输出端固定连接,螺母件502与双头螺杆501螺纹连接,螺母件502上端活动设置有支撑杆503,支撑杆503上端与安装板4下端表面活动连接,通过电机工作有效带动双头螺杆501转动,通过双头螺杆501转动有效实现螺母件502顺着双头螺杆501水平方向移动,相互靠近或者相互远离,当两个螺母件502相互靠近时,有效实现支撑杆503端部相互靠近,进而支撑杆503上端有效支撑起安装板4,有效实现对灭火剂喷头701高度的有效调节。
46.根据附图2、6所示,第一支撑架601上端活动设置有转动轴603,转动轴603一端穿过第一支撑架601侧壁与驱动电机602输出端固定连接,转动轴603中端外侧固定套设有凸轮604,灭火管7靠近灭火剂喷头701一端下方通过延伸杆活动设置有从动轮609,从动轮609下端与凸轮604上边缘滑动接触,安装板4上表面中端固定设置有弹性板605,通过驱动电机
602工作有效带动转动轴603转动,通过转动轴603转动,有效带动凸轮604同步转动,当凸轮604凸出端与从动轮609接触时,有效通过从动轮609顶起灭火管7前端,实现对灭火剂喷头701角度的有效增加,当凸轮604凸出端远离从动轮609时,有效实现灭火剂喷头701角度的有效降低。
47.根据附图1所示,弹性板605上端表面固定设置有复位弹簧606,复位弹簧606上端固定设置有u型卡件607,u型卡件607通过限位轴与灭火管7活动连接,在灭火管7角度调节过程中,有效拉伸或压缩复位弹簧606,通过复位弹簧606拉伸或压缩,从而有效缓冲作用力,同时限制灭火管7的活动范围。
48.根据附图1、2、4、7所示,灭火剂储存箱8上端表面一端固定设置有进料口801,灭火剂储存箱8上端表面远离进料口801一侧开设有收纳槽,灭火剂储存箱8的收纳槽内设置有收纳组件9,收纳组件9包括安装座、收卷辊901、安装框902与驱动轴903,收卷辊901固定套设于驱动轴903外表面,灭火剂流通管道13缠绕于收卷辊901外表面,驱动轴903一端穿过安装座侧壁插入安装框902内部,通过设置有收卷辊901,可有效对灭火剂流通管道13进行缠绕收纳。
49.根据附图1、4所示,安装框902内部驱动轴903外表面固定套设有斜齿环906,斜齿环906外表面等距离设置有若干斜齿,斜齿环906外侧活动设置有弹性棘轮环904,弹性棘轮环904内侧等距离设置有若干棘齿,安装框902内部弹性棘轮环904一侧下方设置有弹性卡齿,当对灭火剂喷头701的高度与角度进行调节过程中,会对灭火剂流通管道13产生拉动的作用力,在拉动灭火剂流通管道13中有效带动驱动轴903与收卷辊901转动,驱动轴903转动过程中斜齿环906的斜齿有效挤压弹性棘轮环904棘齿的坡面并有效通过。
50.根据附图1、4所示,弹性棘轮环904一侧设置有弹片907,斜齿环906一侧驱动轴903上固定设置有固定块905,固定块905上端与弹片907中心端固定连接,弹片907外端部与安装框902内部侧壁固定连接,在斜齿环906的斜齿有效挤压弹性棘轮环904棘齿的坡面并有效通过的同时,驱动轴903有效带动弹片907内部收缩储存能量,当灭火剂喷头701的高度下调时,灭火剂流通管道13受到拉力消失,弹片907释放能量,带动驱动轴903与收卷辊901反向转动,有效对多余的灭火剂流通管道13进行收纳,避免杂乱,弹性棘轮环904,起到进一步的限位作用。
51.根据附图1、4所示,机器人主体1两侧上端均固定设置有限位挡板10,限位挡板10内侧活动设置有活动杆11,活动杆11下端活动设置有支撑滚轮12,当该带有自动灭火装置的防爆机器人在上坡或下坡过程中,通过活动杆11在重力作用下进行位置偏移,同时限位挡板10有效限制活动杆11的位置,支撑滚轮12有效对机器人主体1端部起到支撑作用,避免该带有自动灭火装置的防爆机器人出现翻转的情况。
52.工作原理:本发明公开了一种带有自动灭火装置的防爆机器人在工作时,通过距离传感器301与火焰传感器302有效及时发现着火点,并判断着火情况,通过电机工作有效带动双头螺杆501转动,通过双头螺杆501转动有效实现螺母件502顺着双头螺杆501水平方向移动,相互靠近或者相互远离,当两个螺母件502相互靠近时,有效实现支撑杆503端部相互靠近,进而支撑杆503上端有效支撑起安装板4,有效实现对灭火剂喷头701高度的有效调节,通过驱动电机602工作有效带动转动轴603转动,通过转动轴603转动,有效带动凸轮604同步转动,当凸轮604凸出端与从动轮609接触时,有效通过从动轮609顶起灭火管7前端,实
现对灭火剂喷头701角度的有效增加,当凸轮604凸出端远离从动轮609时,有效实现灭火剂喷头701角度的有效降低,同时,通过根据需要对灭火剂喷头701角度的不断调节,有效增加灭火面积;
53.进一步的,当对灭火剂喷头701的高度与角度进行调节过程中,会对灭火剂流通管道13产生拉动的作用力,在拉动灭火剂流通管道13中有效带动驱动轴903与收卷辊901转动,驱动轴903转动过程中斜齿环906的斜齿有效挤压弹性棘轮环904棘齿的坡面并有效通过,与此同时,驱动轴903有效带动弹片907内部收缩储存能量,当灭火剂喷头701的高度下调时,灭火剂流通管道13受到拉力消失,弹片907释放能量,带动驱动轴903与收卷辊901反向转动,有效对多余的灭火剂流通管道13进行收纳,避免杂乱,弹性棘轮环904,起到进一步的限位作用。
54.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
