技术特征:
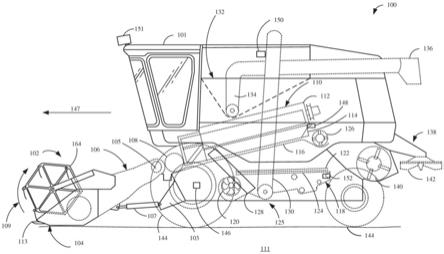
1.一种农业作业机器(100),包括:通信系统(206),所述通信系统(206)接收先前的信息图(258),所述先前的信息图(258)包括地形特性的与在田地中的不同地理位置相对应的值;地理位置传感器(204),所述地理位置传感器(204)检测所述农业作业机器(100)的地理位置;现场传感器(208),所述现场传感器(208)检测与所述地理位置相对应的第一农业特性;预测图生成器(212),所述预测图生成器(212)基于所述先前的信息图(258)中的所述地形特性的值并基于所述第一农业特性的值来生成所述田地的功能预测农业图,所述功能预测农业图将第二农业特性的预测值映射至所述田地中的不同地理位置;可控子系统(216);和控制系统(214),所述控制系统(214)基于所述农业作业机器(100)的地理位置并基于所述功能预测农业图中的所述第二农业特性的预测值来生成控制信号,以控制输送带。2.根据权利要求1所述的农业作业机器,其中,所述控制系统作为所述可控子系统来控制输送带。3.根据权利要求2所述的农业作业机器,其中,所述控制系统独立于第一输送带来控制第二输送带。4.根据权利要求1所述的农业作业机器,其中,所述现场传感器包括输送带速度传感器,所述输送带速度传感器检测输送带速度,所述输送带速度作为所述第一农业特性。5.根据权利要求1所述的农业作业机器,其中,所述现场传感器包括操作者输入传感器,所述操作者输入传感器检测操作者输入,所述操作者输入指示对作为所述第一农业特性的所述输送带速度进行设定的操作者命令。6.根据权利要求1所述的农业作业机器,其中,所述现场传感器包括物料流传感器,所述物料流传感器检测物料流特性,所述物料流特性作为所述第一农业特性。7.根据权利要求1所述的农业作业机器,其中,先前的信息图包括地形图,所述地形图将坡度值作为所述地形特性映射至所述田地中的不同地理位置。8.根据权利要求1所述的农业作业机器,还包括:预测模型生成器,所述预测模型生成器基于所述先前的信息图中的所述地形特性在所述地理位置处的值、和由所述现场传感器检测的所述第一农业特性在所述地理位置处的值来生成预测输送带模型,所述预测输送带模型对所述地形特性与输送带速度之间的关系进行建模,其中,所述预测图生成器基于所述先前的信息图中的所述地形特性的值并基于所述预测输送带模型来生成功能预测农业图。9.一种控制农业作业机器(100)的由计算机实现的方法,包括:获得先前的信息图(258),所述先前的信息图(258)包括地形特性的与田地中的不同地理位置相对应的值;检测所述农业作业机器(100)的地理位置;用现场传感器(208)检测输送带速度的与所述地理位置相对应的值;基于所述先前的信息图(258)中的所述地形特性的值并基于所述输送带速度的与所述地理位置相对应的值来生成田地的功能预测农业图,所述功能预测农业图将预测控制值映
射至所述田地中的不同地理位置;和基于所述农业作业机器(100)的地理位置并基于所述功能预测农业图中的控制值来控制可控子系统(216)。10.一种农业作业机器(100),包括:通信系统(206),所述通信系统(206)接收先前的信息图(258),所述先前的信息图(258)包括地形特性的与在田地中的不同地理位置相对应的值;地理位置传感器(204),所述地理位置传感器(204)检测所述农业作业机器的地理位置;现场传感器(208),所述现场传感器(208)检测输送带速度的与地理位置相对应的值;预测模型生成器(210),所述预测模型生成器(210)基于所述先前的信息图(258)中的所述地形特性在所述地理位置处的值和由所述现场传感器(208)检测的所述输送带速度在所述地理位置处的值来生成预测农业模型,所述预测农业模型对所述地形特性与所述输送带速度之间的关系进行建模;预测图生成器(212),所述预测图生成器(212)基于在所述先前的信息图(258)中的地形特性的值并基于所述预测农业模型来生成所述田地的功能预测农业图,所述功能预测农业图将预测控制值映射至所述田地中的不同地理位置;可控子系统(216);和控制系统(214),所述控制系统(214)基于所述农业作业机器(100)的地理位置并基于所述功能预测农业图中的控制值来生成控制信号,以控制所述可控子系统(216)。
技术总结
通过农业作业机器来获得一个或更多个信息图。所述一个或更多个信息图将一个或更多个农业特性值映射在田地的不同地理位置处。所述农业作业机器上的现场传感器在所述农业作业机器移动通过所述田地时感测农业特性。预测图生成器基于所述一个或更多个信息图中的值与由所述现场传感器感测的农业特性之间的关系来生成预测图,所述预测图预测所述田地中的不同位置处的预测农业特性。所述预测图可以被输出并用于自动化机器控制。出并用于自动化机器控制。出并用于自动化机器控制。
技术研发人员:内森
受保护的技术使用者:迪尔公司
技术研发日:2021.09.28
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。