1.本发明涉及探测技术领域,尤其涉及一种太空防护舱探测系统及探测方法。
背景技术:
2.炼铁高炉内常见的恶劣环境条件有高温、高压、高粉尘、高湿度,探测器若需在炼铁高炉中长时间稳定、精确地在线运行的前提是解决隔热、冷却、耐压、防结露、防沾灰、防大小颗粒物高速冲击等难题。现有针对复杂环境下执行探测任务的主要有阵列雷达、旋转雷达、相控阵雷达进行探测,但由于探测环境恶劣导致寿命很短。
技术实现要素:
3.本公开实施例提供了太空防护舱探测系统及探测方法,可适用于高温、高压、高粉尘、高湿度等复杂环境中,可对探测器进行防护,使得探测器可在复杂环境下完成探测任务,提升探测器的工作寿命。
4.本公开实施例所提供的技术方案如下:
5.一种太空防护舱探测系统,包括:
6.防护舱体,所述防护舱体上设有可开启或关闭的舱门;
7.设置于所述防护舱体内的探测机构,所述探测机构包括机械臂组件及探测器,所述探测器由所述机械臂组件夹持以经由所述舱门进出所述防护舱体执行探测动作;及
8.智能控制机构,所述智能控制机构包括环境感测组件及控制器,所述环境感测组件设置于所述舱门处,用于感测舱外环境的环境感测组件;所述控制器连接至所述环境感测组件和所述探测组件,用于根据所述环境感测组件的感测结果,控制所述探测组件和所述舱门的工作状态。
9.示例性的,所述控制器具体包括:
10.时序控制模块,用于发送指令控制所述舱门及所述探测机构按照预定时间周期开启探测模式,在所述探测模式下,所述舱门开启第一预定开度且所述环境感测组件开启感测工作;及
11.数据处理模块,用于接收所述感测结果并进行数据处理,以判断当前舱外环境是否满足预设条件;
12.第一控制模块,用于当所述感测结果为当前舱外环境满足预设条件时,控制所述舱门从所述第一预定开度继续开启至第二预定开度,且所述机械臂组件夹持所述探测器伸出所述防护舱体外开启探测工作;否则,控制所述舱门关闭且所述机械臂组件夹持所述探测器不伸出所述防护舱体外。
13.示例性的,所述环境感测组件包括以下一种或多种:
14.用于采集所述防护舱的舱外环境图像的红外成像仪;
15.用于采集所述防护舱体外的高炉内部环境和料层温度的辐射温度计;及
16.用于检测高炉内部料面及上部环境的形态场、温度场或流场的sar雷达、mimo雷达
或相控阵雷达。
17.示例性的,所述智能控制机构还包括用于检测所述防护舱体内部状态的内部检测组件,所述内部检测组件包括以下一种或多种:用于获取所述机械臂组件及所述探测器的当前图像的图像采集器;用于获取所述机械臂组件当前位姿信息的位姿传感器;和用于对所述机械臂组件的移动位置进行限位控制的限位传感器;
18.其中,所述太空防护舱探测系统还包括:设置于所述防护舱体内部且处于不同位置上的清理仓库和探测器更换仓库,所述清理仓库内设有清洗组件,所述探测器更换仓库内设有备用探测器;
19.所述控制器还包括:
20.第一图像处理模块,用于对所述图像采集器所采集的图像进行处理,并判断所述探测机构当前外观清洁度是否合格;
21.第二控制模块,用于当所述探测机构当前外观清洁度不合格时,控制所述机械臂组件夹持所述探测器移动至所述清理仓库处,并控制所述清理仓库执行清洗工作;
22.第二图像处理模块,用于对所述图像采集器所采集的图像进行处理,并判断所述探测器是否损坏;
23.第三控制模块,用于当所述探测器损坏时,控制所述机械臂组件释放已损坏的探测器,并移动至所述探测器更换仓库抓取所述备用探测器。
24.示例性的,所述机械臂组件包括:
25.可伸缩的机械臂,所述机械臂在其伸缩方向上具有相对的第一端和第二端,所述机械臂为多级机械臂,;及
26.机械抓手,所述第一端连接所述机械抓手,所述第二端可旋转地连接至所述防护舱体上。
27.示例性的,所述多级机械臂包括从所述第一端至所述第二端依次连接的一级手臂、二级手臂和三级手臂,所述图像采集器位于所述三级手臂上,所述限位传感器分布在所述一级手臂、所述二级手臂和所述三级手臂上,所述位姿传感器设置于所述三级手臂上。
28.示例性的,所述舱门包括:
29.可沿第一方向相向或相背移动以开启或关闭舱门的至少两块门板;及
30.用于控制所述两块门板移动的移动组件,所述移动组件包括:开门舵机、牵引绳、拉环、转轴、门轴和导轨,所述门轴连接至所述门板上,所述转轴可移动地连接在所述导轨上,所述导轨沿第二方向延伸,所述第二方向与所述第一方向之间具有夹角,所述拉环的一端套设于所述门轴,所述拉环的另一端套设于所述转轴,所述牵引绳一端连接至所述开门舵机,所述牵引绳的另一端连接至所述转轴上。
31.一种探测方法,采用如上所述的太空防护舱探测系统进行探测,所述方法包括:
32.通过所述环境感测组件,感测舱外环境;
33.根据所述环境感测组件的感测结果,控制所述探测组件和所述舱门的工作状态。
34.示例性的,所述根据所述环境感测组件的感测结果,控制所述探测组件和所述舱门的工作状态,具体包括:
35.所述舱门及所述探测机构按照预定时间周期开启探测模式,在所述探测模式下,所述舱门开启第一预定开度且所述环境感测组件开启感测工作;
36.当所述感测结果为当前舱外环境满足预设条件时,控制所述舱门从所述第一预定开度继续开启至第二预定开度,且所述机械臂组件夹持所述探测器伸出所述防护舱体外开启探测工作;否则,控制所述舱门关闭且所述机械臂组件夹持所述探测器不伸出所述防护舱体外。
37.示例性的,所述方法还包括:
38.获取所述机械臂组件及所述探测器的当前图像;
39.对所述图像采集器所采集的图像进行处理,并判断所述探测机构当前外观清洁度是否合格;
40.当所述探测机构当前外观清洁度不合格时,控制所述机械臂组件夹持所述探测器移动至所述清理仓库处,并控制所述清理仓库执行清洗工作;
41.对所述图像采集器所采集的图像进行处理,并判断所述探测器是否损坏;
42.当所述探测器损坏时,控制所述机械臂组件释放已损坏的探测器,并移动至所述探测器更换仓库抓取所述备用探测器。
43.本公开实施例所带来的有益效果如下:
44.根据本公开实施例所提的太空防护舱探测系统,可通过环境感测组件来感知防护舱体舱外环境(例如高炉环境),当舱外环境异常时,可控制探测器不伸出防护舱体外工作,这样,可以大大减少探测器被伤害的概率,提升探测器的寿命。
附图说明
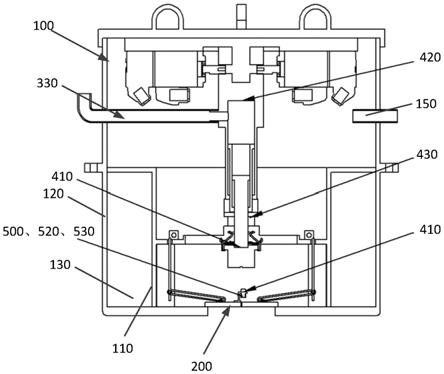
45.图1是本公开实施例提供的太空防护舱探测系统的主视结构图;
46.图2是本公开实施例提供的太空防护舱探测系统的左视结构图;
47.图3是本公开实施例提供的太空防护舱探测系统的总设计图;
48.图4是本公开实施例提供的太空防护舱探测系统的使用方式示意图;
49.图5是本公开实施例提供的太空防护舱探测系统中清洗仓库的结构示意图;
50.图6是本公开实施例提供的太空防护舱探测系统中的舱门结构示意图;
51.图7是本公开实施例提供的太空防护舱探测系统中机械抓手抓取探测器的示意图;
52.图8是本公开实施例提供的太空防护舱探测系统中可伸缩的机械臂的结构示意图;
53.图9是本公开实施例提供的太空防护舱探测系统中可伸缩的机械臂在探测器更换仓库更换元件的示意图;
54.图10是本公开实施例提供的太空防护舱探测系统中可伸缩的机械臂在舱门打开时出舱执行任务的示意图。
55.其中,各部件标记如下:
56.法兰10;高炉20;防护舱体100;内层舱体110;外层舱体120;水冷通道130;进水管140;氮气进气通道150;舱门200;门板210;开门舵机220;牵引绳230;拉环240;转轴250;门轴260;探测机构300;机械臂组件310;可伸缩的机械臂311;一级手臂3111;二级手臂3112;三级手臂3113;机械抓手312;磁环3121;拉杆3122;活动爪3123;固定爪3124;探测器320;进气管330;光源相机410;位姿传感器420;限位传感器430;环境感测组件500;红外成像仪
510;辐射温度计520;检测雷达530;清理仓库600;喷雾器610;清洗刷620;清洗电机630;出水管道640;探测器更换仓库700。
具体实施方式
57.为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
58.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”、“一”或者“该”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
59.在对本公开实施例所提供的太空防护舱探测系统及探测方法进行详细说明之前,有必要对相关技术进行以下说明:
60.在现有技术中,炼铁高炉内常见的恶劣环境条件有高温、高压、高粉尘、高湿度,探测器若需在炼铁高炉中长时间稳定、精确地在线运行的前提是解决隔热、冷却、耐压、防结露、防沾灰、防大小颗粒物高速冲击等难题。现有针对复杂环境下执行探测任务的主要有阵列雷达、旋转雷达、相控阵雷达进行探测,但由于探测环境恶劣导致寿命很短。
61.目前在现有技术中,在复杂环境下执行探测任务的方法有以下几种:
62.第一种,专利公开号为cn106003064a的专利中公开了一种复杂环境多传感器智能探测机器人,其是将多传感器集成于可自主移动的探测小车,通过无线通讯将收集探测数据。该设计三角履带轮的实际可以使其在地形复杂的场合中执行任务,但不可以在高温、高压、高粉尘、高湿度的场合执行任务。
63.第二种,专利公开号为cn111930131a的专利中公开了一种适用于复杂环境的获取图形的装置和应用方法,其提出一种搭载视觉探测、激光避障的履带式小车可在复杂地面环境以及高粉尘下执行探测任务,但其同样不能在高温环境下执行任务。
64.第三种,专利公开号为cn113494972a的专利中公开了一种用于高炉炉温的装置和方法,提出了用双层炉温监控模块执行测温任务,由于该温度监控模块固定安放在高炉内部,不能进行智能感知后执行探测任务。
65.综合上述,国内外在处理存在高温的复杂环境探测问题上,日本wadeco公司针对高炉环境在炉顶开大型探测窗,其探测仪主体也是通过开门测量,关门休息的方式,延长工作寿命,但内部传动结构是镜面旋转使激光或者毫米波折射进入高炉料面,完成扫描,备件不可更换,而且开大方孔,开孔面积大,影响安全。
66.为了解决现有技术中的问题,提供一种更智能的探测系统,本公开实施例中提供
了一种太空防护舱探测系统,其可以使得探测器短时直接伸入高炉内,进行包括测温、测速、测形态以及取样等探测工作,设计简单高效,能胜任高温、高尘等复杂环境。
67.如图1至10所示,本公开实施例所提供的太空防护舱探测系统,包括:
68.防护舱体100,所述防护舱体100上设有可开启或关闭的舱门200;
69.设置于所述防护舱体100内的探测机构300,所述探测机构300包括机械臂组件310及探测器320,所述探测器320由所述机械臂组件310夹持以经由所述舱门200进出所述防护舱体100执行探测动作;及
70.智能控制机构,所述智能控制机构包括环境感测组件500及控制器(未示意),所述环境感测组件500设置于所述舱门200处,用于感测舱外环境的环境感测组件500;所述控制器连接至所述环境感测组件500和所述探测组件,用于根据所述环境感测组件500的感测结果,控制所述探测组件和所述舱门200的工作状态。
71.根据本公开实施例所提的太空防护舱探测系统,将防护舱结构、机械臂和智能感知系统进行了三元一体化设计,可通过环境感测组件500来感知防护舱体100舱外环境(例如高炉环境),当舱外环境异常时,可控制探测器320不伸出防护舱体100外工作,这样,可以大大减少探测器320被伤害的概率,提升探测器320的寿命。
72.示例性的,所述控制器具体包括:
73.时序控制模块,用于发送指令控制所述舱门200及所述探测机构300按照预定时间周期开启探测模式,在所述探测模式下,所述舱门200开启第一预定开度且所述环境感测组件500开启感测工作;及
74.数据处理模块,用于接收所述感测结果并进行数据处理,以判断当前舱外环境是否满足预设条件;
75.第一控制模块,用于当所述感测结果为当前舱外环境满足预设条件时,控制所述舱门200从所述第一预定开度继续开启至第二预定开度,且所述机械臂组件310夹持所述探测器320伸出所述防护舱体100外开启探测工作;否则,控制所述舱门200关闭且所述机械臂组件310夹持所述探测器320不伸出所述防护舱体100外。
76.采用上述方案,通过环境感测组件500来感知防护舱体100舱外环境(例如高炉环境),当舱外环境异常时,可控制探测器320不伸出防护舱体100外工作,这样,可以大大减少探测器320被伤害的概率,提升探测器320的寿命。
77.本公开一些实施例中提供的太空防护舱探测系统,可将智能感知的探测器320搭载于测控机械臂上,并将二者置于太空防护舱内,在感知到能达到外界工作条件允许下探测器320通过机械臂出舱探测,当感知到外界具有对其造成破坏性风险时回舱待机,并进行自我故障诊断、按需启动维护清理流程。
78.本公开实施例所提供的太空防护舱探测系统可应用于各种高温、高压、高粉尘、高湿度的复杂环境中,可对探测器320进行保护,使探测器320在太空防护舱探测系统的保护下能胜任复杂环境的探测任务。例如适用于高炉内部环境探测,舱外300-500度高温火焰燃烧环境,短时不超过850度的环境。该太空防护舱探测系统可以维持舱温在45度以内,短时(一般半小时)不超过80度的环境结构设计。以下仅以高炉环境为例,对本公开实施例提供的太空防护舱探测系统进行详细说明。
79.图4所示为本公开实施例中提供的太空防护舱探测系统安装方式结构示意图。如
图4所示,该太空防护舱探测系统的防护舱体100可通过法兰10与高炉20封罩炉顶焊接的套筒螺栓固定,这样,整个太空防护舱探测系统可以整体更换。
80.所述防护舱体100可选用耐高温、耐高压、耐腐蚀的材质制成,在防护舱体100上设有双冷却机构,以使得该防护舱体100内部的温度低于外部高炉环境温度,从而保证探测器320在该防护舱体100内部能在高炉的高温环境下长期待机。
81.具体地,以图1和图2所示为例,该防护舱体100上的双冷却机构包括水冷结构和氮封结构,其中水冷结构包括双层舱体,分别为内层舱体110和外层舱体120,在内层舱体110和外层舱体120之间形成水冷通道130,该水冷通道130可沿该防护舱体100的周向环绕,在该防护舱体100上设有与所述水冷通道130连通的进水管140和出水管,以向该水冷通道130内输送冷却循环水。氮封结构包括与所述防护舱体100的内部连通的氮气进气通道150。
82.在上述方案中,在防护舱进出水管和出水管加入冷却循环水,在氮气进气通道150内充入氮气形成正压,其中水冷通道130可设置整个防护舱体100的底部且呈环形环绕防护舱体100的底部,不仅可用于抵御来自底部的上升热气流,将大量传导热量带走,也避免了其与内部机械设备和电器元件的接触。而氮气进气管道可设置于防护舱体100的上方,充入氮气正压灌满整个防护舱体100,这样,可在舱内施加一定的正压,例如比炉内压力大2~3公斤,带压充满氮气,比外界的高炉炉内压强高,可以抵御外界热气流的向内侵蚀,防止舱内被炉内气氛侵蚀。
83.需要说明的是,冷却水通道可直接设计在舱底和侧面,舱底和侧面的冷却水导通相互贯通,设计无死角,以利于水流顺畅无阻挡和无压降。
84.上述方案,通过设计双冷却机构,为防护舱体100提供水冷、氮封双冷却支持,以使得探测器320可在回舱后处于内舱机械设备与探测器320处于氮气风冷下,外仓加入水冷,保证其能在高温环境下长期待机。
85.在一些实施例中,探测器320可采用无线方式采集数据,其可以是集成了微波、毫米波和可见光的各种集成或者某一功能的参数测量仪,也可以是其中任何一个分离的探测单元,探测器320完成温度场、流场和速度场的相关测量或者外部取样分析任务。探测器320出舱执行探测任务时,可通过斜射扫描高炉料面、获取料面信息。
86.在一些实施例中,所述环境感测组件500包括红外成像仪510、辐射温度计520、检测雷达530中的一种或多种,其中红外成像仪510用于采集所述防护舱的舱外环境图像;辐射温度计520用于采集所述防护舱体100外的高炉内部环境和料层温度;检测雷达530用于检测用于检测高炉内部料面及上部环境的形态场、温度场或流场等。上述方案中,红外成像仪510可用于视频监控舱外火焰浓烟等情况,辐射温度计520可测量舱外温度,检测雷达530可选用可以选用sar雷达、mimo雷达或相控阵雷达中的一个或多个等任意合适的检测雷达,用于检测高炉内部料面及上部环境的形态场、温度场或流场。其中,通过以上环境感测组件500,可对高炉环境进行感测,并将感测结果发送至控制器,控制器对感测结果进行数据处理分析,以判断当前炉内环境是否满足预设条件,也就是,判断舱外环境和温度是否适合探测器320进行探测任务,若是,则在条件许可下加大气氮气的进风量,使防护舱体100内外形成一定压差,防止高温、腐蚀气体侵蚀舱内设备,打开舱门200,机械臂组件310伸展使探测器320出舱执行任务。
87.需要说明的是,控制器内可存储有预定指令,控制所述舱门200及所述探测机构
300按照预定时间周期开启探测模式,在所述探测模式下,所述舱门200开启第一预定开度(例如仅开一条缝)且所述环境感测组件500开启感测工作。具体地,所述红外成像仪510可安装于舱门200上,且红外成像仪510、辐射温度计520及检测雷达530可放置于舱外仪器防护盒内,由该舱外仪器防护盒进行防护,当舱门200开启第一预定开度时,红外成像仪510、辐射温度计520和检测雷达530通过门缝分别对舱外环境、温度和气流速度进行感测,当所述感测结果为当前舱外环境满足预设条件时,控制所述舱门200从所述第一预定开度继续开启至第二预定开度(第二预定开度大于第一预定开度,即舱门200继续打开),且所述机械臂组件310夹持所述探测器320伸出所述防护舱体100外开启探测工作;否则,控制所述舱门200关闭且所述机械臂组件310夹持所述探测器320不伸出所述防护舱体100外。
88.需要说明的是,当探测器320执行探测任务时,红外成像仪510、辐射温度计520和检测雷达530均处于实时监控状态,以便于当遇到紧急情况时,探测器320回舱待机检修。
89.示例性的,所述智能控制机构还包括用于检测所述防护舱体100内部状态的内部检测组件,所述内部检测组件包括图像采集器、位姿传感器和限位传感器中的一个或多个,其中图像采集器用于获取所述机械臂组件310及所述探测器320的当前图像;位姿传感器用于获取所述机械臂组件310当前位姿信息;限位传感器用于对所述机械臂组件310的移动位置进行限位控制。
90.所述太空防护舱探测系统还包括:设置于所述防护舱体100内部且处于不同位置上的清理仓库600和探测器更换仓库700,所述清理仓库600内设有清洗组件,所述探测器更换仓库700内设有备用探测器320;其中,
91.所述控制器还包括:
92.第一图像处理模块,用于对所述图像采集器所采集的图像进行处理,并判断所述探测机构300当前外观清洁度是否合格;
93.第二控制模块,用于当所述探测机构300当前外观清洁度不合格时,控制所述机械臂组件310夹持所述探测器320移动至所述清理仓库600处,并控制所述清理仓库600执行清洗工作;
94.第二图像处理模块,用于对所述图像采集器所采集的图像进行处理,并判断所述探测器320是否损坏;
95.第三控制模块,用于当所述探测器320损坏时,控制所述机械臂组件310释放已损坏的探测器320,并移动至所述探测器更换仓库700抓取所述备用探测器320。
96.上述方案,在该太空防护舱探测系统内还设置有清理仓库600,可对探测器320进行自动清洁或检查任务。示例性的,如图5所示,所述清理仓库600内设置有清洗组件,该清洗组件主要包括由带电控节水阀控制的喷雾器610、清洗刷620、清洗电机630和带单项节水阀的出水管道640,执行清洗任务时,电节水阀控制的喷雾器610喷雾后,清洗电机630转动清洗刷620对探测器320进行刷洗,在清理仓库600清理后在机械臂组件310驱动下探测器320回归中间位置,并由图像采集器检查是否合格,不合格继续回去清理,合格则待机位准备正常出舱工作。若发现探测器320损坏,则机械臂组件310释放探测器320,并移动至探测器更换仓库700进行备件更换。在一个检修周期内,探测器更换仓库700中仅需放置一个备用探测器320。
97.示例性的,探测器320采用无线方式采集数据,探测器更换仓库700底部可设置线
圈,当备用探测器320放置于探测器更换仓库700时,线圈可通电对备用探测器320进行充电及自维护。
98.示例性的,防护舱体100内设置储物环,探测器更换仓库700置于所述储物环中,探测器更换仓库700中放置了用于更换的备用探测器320及其它元件的备用探测器320模块,可以将损坏的探测器320置于储物环空盒后,取出备用的探测器320。防护舱体100内通过图像采集器可进行视频监控,当自动更换时可以启动自动更换程序,也可以在外部通过视频信号,遥控机器臂组件执行不同动作,例如污染表面清理,观察内部气流粉尘和运动状况等。机器人化的机器臂组件可以全自动操作、半自动操作或者人工遥控操作。
99.需要说明的是,在一些实施例中,如图1所示,清理仓库600和探测器更换仓库700可分别设置在防护舱体100内部的左右两侧的两个工位,这样,机械臂组件310可通过左右摆动而移动至两个工位。但是,应当理解的是,在实际应用中,清理仓库600和探测器更换仓库700也可以设置在防护舱体100内的其他位置,对此并不限定。
100.示例性的,如图8所示,所述机械臂组件310包括:可伸缩的机械臂311及机械抓手312,所述机械臂311在其伸缩方向上具有相对的第一端和第二端,所述第一端连接所述机械抓手312,所述第二端可旋转地连接至所述防护舱体100上。所述机械臂311可以为多级机械臂,例如,一些实施例中,如图8所示,从所述第一端至所述第二端,所述机械臂311包括依次连接的一级手臂3111、二级手臂3112和三级手臂3113。需要说明的是,以上仅为示例,在实际应用中,所述多级机械臂不限于三级机械臂,还可以是两级或者四级等多级机械臂。
101.在上述方案中,机械臂组件310中机械手结构用于抓取探测器320,所述机械手可采用磁吸式吸附和/或机械锁紧方式抓取探测器320;可伸缩的机械臂311用于使机械手能进入探测器更换仓库700更换部件和出舱执行任务。
102.示例性的,如图7所示,所述机械抓手312包括磁环3121、拉杆3122、活动爪3123和固定爪3124。在抓取探测器320或其他元件时,固定爪3124内部磁感应线圈通电,使固定抓的上部为n极,下部为s极,从而与磁环3121同极相斥并通过拉杆3122将活动爪3123夹紧探测器320,同时探测器320顶部为s极且与固定爪3124相吸。在执行放下探测器320动作时,固定爪3124内部磁感应线圈断电,磁环3121凭借重力下滑而松开活动爪3123,同时,探测器320与固定爪3124不再相吸。放下探测器320的过程中,当所抓取的探测器320不处于探测器更换仓库700时,磁环3121自身重力不足以克服探测器320与活动爪3123之间的摩擦力,不会松开活动爪3123,这样有利于机械手只在探测器320仓库进行备件更换。应当理解的是,以上仅是提供了一种机械手的示例性结构,在其他未示意出的实施例中,机械手还可以采用其他方式实现。
103.示例性的,可伸缩的机械臂311具有两个旋转自由度和多级伸缩臂,该机械臂安装于底座,可用过两个伺服电机控制其旋转自由度,如图8所示。伺服电机旋转精度需要保证机械臂组件310通过两级旋转对准所需抓取探测器320或其他元件的位置进行伸展抓取和放置。在收到出舱信号后,机械臂依次伸展一级手臂、二级手臂和三级手臂执行出舱任务,其伸缩的动力源可以为气动,例如图8所示,进气口330连通至三级伸缩臂,以驱动三级伸缩臂伸缩。由于出舱时舱门200打开,舱内压强减小,因此机械臂很容易保持伸展状态;相反,回舱时舱内压强增大,因此机械臂也容易保持收缩状态。需要说明的是,机械臂伸缩的动力源还可以是其他方式,并不限于气动方式,例如,还可以是液动或电动等,只要能够完成机
械臂伸缩的结构,均在本专利保护范围之内。
104.此外,示例性的,所述图像采集器位于所述三级手臂上,所述限位传感器分布在所述一级手臂、所述二级手臂和所述三级手臂上,所述位姿传感器设置于所述三级手臂上。
105.在上述方案中,智能控制机构融合多种传感器,多种传感器分布在防护舱体100和机械臂上。示例性的,所述图像采集器可以采用视觉传感器和光源相机实现,光源相机410可置于三级手臂上,该光源相机410可采集探测器320的图像,以检查探测器320清洗效果和有无故障等。所述位姿传感器420用于捕捉机械臂形态,其可以选用惯导传感器例如imu传感器等,设置于三级手臂的两个旋转轴上。限位传感器430可以包括光电开关等,用于对对机械臂进行限位控制,其中光电开关可置于一级手臂、二级手臂及三级手臂上。
106.此外,示例性的,探测器320及各传感器与控制器之间可采用无线通讯传输数据。例如,当红外成像仪510、辐射温度计520和检测雷达530确保舱外环境允许工作时,通过装在机械臂上的光源相机410和位姿传感器420进行抓放探测器320、进出仓动作,机械臂的运动限幅由光电开关或力传感器限制,同时光电开关或力传感器还对机械臂起到防撞作用。可在舱门200上设置另一光源相机410,用于监控舱内设备状态信息,包括检查清洗效果、探测器320自检、机械臂状态等。
107.此外,本公开实施例提供的太空防护舱探测系统,还可以完成机械臂的取样分析的任务,通过配置不同取样器的探头,也可以完成炉内气氛和成分分析任务。
108.此外,示例性的,如图6所示,所述舱门200包括:
109.可沿第一方向相向或相背移动以开启或关闭舱门200的至少两块门板210;及
110.用于控制所述两块门板210移动的移动组件,所述移动组件包括:开门舵机220、牵引绳230、拉环240、转轴250、门轴260和导轨270,所述门轴260连接至所述门板210上,所述转轴250可移动地连接在所述导轨270上,所述导轨270沿第二方向延伸,所述第二方向与所述第一方向之间具有夹角,所述拉环240的一端套设于所述门轴260,所述拉环240的另一端套设于所述转轴250,所述牵引绳230一端连接至所述开门舵机220,所述牵引绳230的另一端连接至所述转轴250上。
111.上述方案中,闭门状态时,拉环240负重并与舱门200前端磁性相吸,以共同将舱门200锁紧。执行开启舱门200任务时,开门舵机220先转动一定角度,通过牵引绳230拉动转轴250沿着导轨270上升;拉环240倾斜度增大,并通过门轴260拉动两块门板210分别向两侧移动。在这个过程中,舱门200开启第一预定开度时,即,在形成一定门缝时,可通过红外成像仪510、辐射温度计520和检测雷达530测量舱外高炉上部环境和料层温度。在舱外环境条件允许下继续开启舱门200,否则关闭舱门200。
112.需要说明的是,在一些实施例中,所述门板的数量可以为两块,但是并不以此为限,在实际应用中,所述门板的数量还可以是三块及三块以上。
113.综合上述,本公开实施例提供的太空防护舱探测系统,是一种智能化防护系统,可通过感知炉内外的状态,当炉况异常时,探测器320不出来工作,可以大大减少其被伤害的概率,并且回到舱内可自我检测与修复,其执行机构即机械臂组件310可以根据检测结果决定出舱或者不出舱。出舱机构设计采用双电机控制,执行出舱-探测-缩回-清洗(更换)的顺序工作流程,一般在一个高炉检修期内,例如3-6个月,可以长期保持稳定工作,不受现有高炉固定套筒安装、雷达天线暴露在高炉内部烘烤和污染的环境下寿命大大缩短的限制,有
效增加了防护效能。同时可伸缩的机械臂311智能化的抓取-探测-松开的结构设计,确保探测器320按需工作,减少危险区域暴露时间,提高了探测设备的工作寿命。
114.本公开实施例提供的太空防护舱探测系统可以用于高温、高压、高粉尘、高湿度的复杂环境对探测器320进行保护,使其在太空防护舱的探测系统的保护下能胜任复杂环境的探测任务。适用于舱外300-500度高温火焰燃烧环境,短时不超过850度,该机构可以维持舱温在45度以内,短时(一般半小时)不超过80度的环境结构设计。
115.此外,本公开实施例还提供了一种探测方法,采用本公开实施例的太空防护舱探测系统进行探测,所述方法包括:
116.步骤s01、通过所述环境感测组件500,感测舱外环境;
117.步骤s02、根据所述环境感测组件500的感测结果,控制所述探测组件和所述舱门200的工作状态。
118.示例性的,所述步骤s02具体包括:
119.步骤s021、所述舱门200及所述探测机构300按照预定时间周期开启探测模式,在所述探测模式下,所述舱门200开启第一预定开度且所述环境感测组件500开启感测工作;
120.步骤s022、当所述感测结果为当前舱外环境满足预设条件时,控制所述舱门200从所述第一预定开度继续开启至第二预定开度,且所述机械臂组件310夹持所述探测器320伸出所述防护舱体100外开启探测工作;否则,控制所述舱门200关闭且所述机械臂组件310夹持所述探测器320不伸出所述防护舱体100外。
121.示例性的,所述方法还包括:
122.步骤s031、获取所述机械臂组件310及所述探测器320的当前图像;
123.步骤s032、对所述图像采集器所采集的图像进行处理,并判断所述探测机构300当前外观清洁度是否合格;
124.步骤s033、当所述探测机构300当前外观清洁度不合格时,控制所述机械臂组件310夹持所述探测器320移动至所述清理仓库600处,并控制所述清理仓库600执行清洗工作;
125.步骤s034、对所述图像采集器所采集的图像进行处理,并判断所述探测器320是否损坏;
126.步骤s035、当所述探测器320损坏时,控制所述机械臂组件310释放已损坏的探测器320,并移动至所述探测器更换仓库700抓取所述备用探测器320。
127.以下结合本公开实施例的太空防护舱探测系统及探测方法,对该系统的功能进行更为详细的说明:
128.1)该太空防护舱探测系统具备回舱待机保护自修复功能。
129.该太空防护舱探测系统的防护舱体100具有水冷、氮封双冷却结构支持。在探测器320回舱后,处于舱内的机械设备与探测器320处于氮气风冷下,外仓加入水冷,保证其能在高温环境下长期待机。
130.待机状态下对探测器320进行自修复功能,若通过智能控制机构的内部检测组件对探测器320检查时,发现探测器320存在损伤等问题,此时可伸缩的机械臂311自动将手臂缩紧,以提升探测器320的高度,然后,转动可伸缩的机械臂311,以调整手臂姿态,使其机械手对准处于探测器更换仓库700的空舱位,并伸展手臂后断开机械手上的磁感应线圈电流,
以释放探测器320。然后,再次收缩、校准备用探测器320后伸展、抓取探测器320。
131.2)该太空防护舱探测系统具备探测器320出舱执行探测任务的功能。
132.该系统的智能控制机构按照预定的时序控制方式,以一定周期来控制整个系统开启探测模式,在开始探测模式时,舱门200开启第一预定开度,即打开一条门缝,位于舱门200处的红外成像仪510、辐射温度计520和检测雷达530分别对舱外环境和温度进行判断。在舱外环境条件许可下,加大气氮气进气通道150氮气的进风量,使其内外形成一定压差,防止高温、腐蚀气体侵蚀舱内设备。两块门板210通过牵引绳230逐步打开,机械臂伸展,使探测器320出舱执行任务。
133.其中,探测器320在执行探测任务时,红外成像仪510、辐射温度计520和检测雷达530均处于实时监控状态,当遇到紧急情况时,向控制器发送检测信号,以控制机械臂回舱待机检修。
134.3)在探测到紧急情况下,探测器320停止工作立即回舱气动自修复功能。
135.回舱时控制机械臂收缩,两块门板210关闭。待舱门200关闭后,逐渐减小氮气的进气量,使其处于正常待机状态,保护舱内部氮气和炉外是隔离的,压住上升的煤气,防止上升进入到保护舱内,舱内始终是充满氮气的正压。需要说明的是,保护舱和炉内气氛并不是完全物理隔离,氮气可微微保持一定的流量,并持续通过门缝进入高炉,热量和舱外高污染始终被阻挡在舱外,无法进入防护舱体100内部。防护舱体100承受压力可不小于12公斤。
136.舱内对探测器320具有自检功能,若光源相机410发现探测器320的表面异常,如积灰,污染,破损等异常,启动自修复或者更换程序。
137.4)该太空防护舱探测系统具备舱外状态监控功能。
138.探测器320回舱待机后,红外成像仪510、辐射温度计520和检测雷达530分别对舱外环境和温度进行判断,待舱外环境条件许可执行出舱任务。
139.需要说明的是,本公开实施例所提供的太空防护舱探测系统及探测方法,可不仅仅局限于智能感知决策控制关键设备的出舱、入舱探测和清理维护,只要是高炉炉顶安装,具有舱内、舱外隔离保护,红外测料面温度场,雷达测料面形态场和煤气流的速度场的集成式或者分离式测量原理与方法的应用场景,均在本专利保护范围内。
140.有以下几点需要说明:
141.(1)本公开实施例附图只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计。
142.(2)为了清晰起见,在用于描述本公开的实施例的附图中,层或区域的厚度被放大或缩小,即这些附图并非按照实际的比例绘制。可以理解,当诸如层、膜、区域或基板之类的元件被称作位于另一元件“上”或“下”时,该元件可以“直接”位于另一元件“上”或“下”或者可以存在中间元件。
143.(3)在不冲突的情况下,本公开的实施例及实施例中的特征可以相互组合以得到新的实施例。
144.以上,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,本公开的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
