1.本发明属于精密测量技术领域,具体涉及基于空间光调制的高稳定性纳弧度量级角度测量方法与装置。
背景技术:
2.在精密测量技术领域、光学工程领域、尖端科学实验领域和高端精密装备制造领域中,迫切需求在大工作范围下进行高分辨力、高精度、高稳定性的自准直角度测量技术。它支撑着上述领域技术与仪器装备的发展。
3.在精密测量技术与仪器领域,自准直仪与圆光栅组合,可以进行任意线角度测量;自准直技术与多面棱体组合,可以进行面角度测量和圆分度测量;最大工作距离从几米至上百米;分辨力从0.1角秒至0.01角秒。
4.在光学工程领域和尖端科学实验领域,自准直仪与两维互为垂直的两个圆光栅组合,可以进行空间角度的测量;由两路自准直仪组成位置基准,可以进行两两光轴夹角或平行性的测量。角度工作范围从几十角秒至几十角分。
5.在尖端科学实验装置和高端精密装备制造领域,采用自准直仪可以测量尖端科学实验装置和高端精密装备回转运动基准的角回转精度,测量直线运动基准的空间直线精度和两两运动基准的平行度和垂直度。
6.自准直技术具有非接触、测量精度高、使用方便等优点,在上述领域中具有广泛应用。
7.传统自准直仪如图1所示,该装置包括激光光源1、第一凸透镜41、第一分光镜2以及图像传感器3;激光光源1出射的光束,经过凸透镜41准直成平行光束后,入射到被测物5的反射面;从被测物5反射面反射的光束,由图像传感器3采集成像。在这种结构下,自准直仪准直透镜的焦距一般为500mm,而常用传感器的极限位移分辨力在30到50nm之间,有效测量面积一般为5
×
5mm2;同时由于激光光源存在较大的漂移量,测量的不稳定性严重影响测量的极限分辨力。这些条件限制,使得该装置在测量被测物的空间角度信息时,在300角秒的量程范围内难以突破0.003角秒(十纳弧度量级)的分辨力瓶颈。
8.综上所述,该系统存在以下两个问题:
9.第一、由于自准直仪的极限角度分辨力与测量量程存在矛盾关系,因此无法在传统测量范围内达到纳弧度量级的高角度分辨力。如果增大自准直仪准直物镜的焦距,自准直仪的极限角度分辨力提高,但是测量量程会成比例缩小;如果通过提高传感器的有效测量面积,其极限位移分辨力下降也会导致自准直仪的极限角度分辨力下降。因此传统技术很难在300角秒的量程范围内达到0.001角秒(纳弧度量级)的高角度分辨力;
10.第二、传统自准直技术的激光光源存在光束漂移量,其光束的角漂量与平漂量严重影响自准直仪的稳定性,进而限制了自准直仪的极限分辨力。激光光源经凸透镜准直后由于其漂移量的存在,准直精度只能达到10
‑7弧度量级(百纳弧度量级)。其光源的不稳定性带来的噪声严重限制了自准直仪极限分辨力的提高。
11.因此传统自准直技术,在不具备高测量稳定性的同时,无法在传统测量范围内达到纳弧度量级的高角度分辨力。
技术实现要素:
12.针对传统自准直角度测量装置所存在的无法在传统测量范围内达到纳弧度量级的高角度分辨力以及不具备高测量稳定性的问题,本发明公开了基于空间光调制的高稳定性纳弧度量级角度测量方法与装置。
13.该方法在光源出射端利用四象限位置探测器作为反馈探测模块,实时高精度的检测该装置中光源产生的平漂、角漂的漂移量;利用空间光调制器作为反馈执行模块,根据所测量的漂移量实时进行闭环反馈控制,将光源出射的光斑始终控制在四象限位置探测器的中心位置,同时对光源光强的空间幅值分布进行可编程控制,从而直接降低光源的漂移量,提高光源光强在空间分布上的稳定性。实验表明,该方法实时将光源的平漂、角漂漂移量控制至十纳弧度量级,解决由于光束的漂移量限制自准直仪极限分辨力的问题;
14.该方法利用准直物镜组、多狭缝光阑、双路分光镜、双路线阵ccd实现分路复用技术,在较大量程范围内实现纳弧度量级的角度分辨力测量。实验表明,该方法在三百角秒量程范围内可实现千分之一角秒的角度分辨力,解决自准直仪无法在传统测量范围内达到纳弧度量级的高角度分辨力的问题;
15.因此,该发明同传统自准直测量装置相比,具有在相同测量量程的条件下具有纳弧度量级的高角度分辨力以及高测量稳定性的技术优势。
16.本发明的目的是这样实现的:
17.基于空间光调制的高稳定性纳弧度量级角度测量装置,包括第一led光源、第二led光源、第一凸透镜、第四凸透镜、第五凸透镜、第一凹透镜、第一多狭缝光阑、第二多狭缝光阑、第一分光镜、第二分光镜、第三分光镜、第四分光镜、第一转折镜、第二转折镜、第一线阵ccd、第二线阵ccd、四象限位置探测器、第一透射式空间光调制器、第二透射式空间光调制器以及平面反射镜;第一led光源、第二led光源分别经第四凸透镜、第五凸透镜准直后,经第一透射式空间光调制器、第二透射式空间光调制器透射后,平行入射于第一多狭缝光阑以及第二多狭缝光阑;以第一多狭缝光阑与第二多狭缝光阑作为物面,发出的两束光经第一分光镜汇聚,再经第四分光镜分束,分为反射光与透射光;反射光垂直入射于四象限位置光电探测器;透射光经过第一转折镜、第二转折镜的转折后,垂直入射于准直物镜组准直成平行光束,后经平面反射镜反射均沿原路返回,经第二分光镜反射后,由第三分光镜分束,一路入射于第一线阵ccd采集成像,一路入射于第二线阵ccd采集成像;
18.所述第一透射式空间光调制器、第二透射式空间光调制器分别用于调制第一束测量光与第二束测量光,使第一束测量光、第二束测量光分别垂直入射于第一多狭缝光阑与第二多狭缝光阑;
19.所述第一多狭缝光阑是由三条平行等距等宽的直线狭缝组成的透射式光阑,第一led光源经第二凸透镜准直后照射于第一多狭缝光阑,因此三条平行等距等宽的直线光斑为该装置的一个物,其发出的光束为该装置的第一束测量光;第二多狭缝光阑与第一多狭缝光阑结构相同,但其狭缝与第一多狭缝光阑的狭缝方向互相垂直,因此发出第二束测量光的物也为三条平行等距等宽的直线光斑,同时与第一束测量光束的光斑互相垂直;
20.或
21.所述第一多狭缝光阑是由四条平行等距等宽的直线狭缝组成的透射式光阑,第一led光源经第二凸透镜准直后照射于第一多狭缝光阑,因此四条平行等距等宽的直线光斑为该装置的一个物,其发出的光束为该装置的第一束测量光;第二多狭缝光阑与第一多狭缝光阑结构相同,但其狭缝与第一多狭缝光阑的狭缝方向互相垂直,因此发出第二束测量光的物也为四条平行等距等宽的直线光斑,同时与第一束测量光束的光斑互相垂直;
22.所述第一线阵ccd采集第一束测量光成像,传感器测量方向与第一多狭缝光阑的狭缝方向互相垂直;第二线阵ccd采集第二束测量光成像,传感器测量方向与第二多狭缝光阑的狭缝方向互相垂直;
23.所述四象限位置探测器采集第一束测量光与第二束测量光的实时漂移量,对测量结果进行修正,进一步提高系统装置的稳定性;
24.所述准直物镜组由第一凸透镜与第一凹透镜组成,构成摄远物镜组,其焦距远大于第一凸透镜,从而提高自准直仪的极限角度分辨力;
25.所述第一转折镜与第二转折镜互相平行放置,均与主光轴存在一个固定小角度,使得本系统装置的长焦光路得以折叠,从而缩小系统的空间尺寸。
26.一种在上述基于空间光调制的高稳定性纳弧度量级角度测量装置上实现的基于空间光调制的高稳定性纳弧度量级角度测量方法,包括以下步骤:
27.步骤a、将平面反射镜固定至被测物表面;
28.步骤b、点亮第一led光源以及第二led光源,调整被测物以及平面反射镜的位置,使第一线阵ccd、第二线阵ccd与四象限位置探测器接收的光斑图像的几何中心均处于各传感器的中心位置;
29.步骤c、调整第一多狭缝光阑与第二多狭缝光阑的安装方向,使得第一线阵ccd与第二线阵ccd接收的光斑图像的方向分别与传感器的安装方向互相垂直;
30.步骤d、控制第一led光源以及第二led光源以固定频率交替闪烁,此时四象限位置探测器直接接收由第一led光源以及第二led光源发出的两束测量光,第一线阵ccd与第二线阵ccd分别交替采集由第一led光源以及第二led光源发出的测量光;
31.步骤e、当四象限位置探测器输出第一led光源以及第二led光源的光斑位移漂移量e1、e2时,第一透射式空间光调制器调整第一led光源的光束方向,使光斑位移漂移量e1始终为0,第二透射式空间光调制器调整第二led光源的光束方向,使光斑位移漂移量e2始终为0;
32.步骤f、当平面反射镜随被测物产生偏航角与俯仰角转动时,第一线阵ccd输出由第一多狭缝光阑产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s1,第二线阵ccd输出第二多狭缝光阑产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s2;
33.步骤g、利用第一线阵ccd光斑的位移s1,按照s1=f
·
tan(2
ɑ
)计算求得
ɑ
,其中
ɑ
为被测物产生偏航角的角度;利用第二线阵ccd光斑的位移s2,按照s2=f
·
tan(2β)计算求得β,其中β为被测物产生俯仰角的角度。
34.有益效果:
35.1、针对传统自准直角度测量装置所存在的不具备高测量稳定性的问题,提出了基
于空间光调制的高稳定性纳弧度量级角度测量方法。该方法在光源出射端利用四象限位置探测器作为反馈探测模块,实时高精度的检测该装置中光源产生的平漂、角漂的漂移量;利用空间光调制器作为反馈执行模块,根据所测量的漂移量实时进行闭环反馈控制,将光源出射的光斑始终控制在四象限位置探测器的中心位置,同时对光源光强的空间幅值分布进行可编程控制,从而直接降低光源的漂移量,提高光源光强在空间分布上的稳定性;最终实现将光源的平漂、角漂漂移量控制至十纳弧度量级,解决由于光束的漂移量限制自准直仪极限分辨力的问题,这是本发明区别于现有技术的创新点之一;
36.2、相较于传统测量装置,本发明装置将激光光源替换为led光源,直接降低了由于光源漂移量带来的测量不稳定性;利用第二凸透镜,第三凸透镜对led光源发出的光进行准直,同时第一多狭缝光阑与第二多狭缝光阑对两路平行光进行调制,以第一多狭缝光阑与第二多狭缝光阑作为该系统装置的物,进一步降低角漂、平漂的影响,这是本发明区别于现有技术的创新点之二;
37.3、针对传统自准直角度测量装置所存在的无法在传统测量范围内达到纳弧度量级的高角度分辨力的问题,该方法利用准直物镜组、多狭缝光阑、双路分光镜以及双路线阵ccd实现分路复用技术,在较大量程范围内实现纳弧度量级的角度分辨力测量。该方法在三百角秒量程范围内可实现千分之一角秒的角度分辨力,最终实现系统在传统测量范围内达到纳弧度量级的高角度分辨力,突破自准直仪极限角度分辨力与测量量程之间的矛盾关系,这是本发明区别于现有技术的创新点之三。
38.除此之外,本发明还具有以下几种技术优势:
39.第一、选择第一转折镜、第二转折镜对系统长焦光路进行两次折叠,缩小了系统装置的体积,更加适用于现场测量环境,同时避免系统装置由于尺寸过大带来的空气波动对测量结果的影响;
40.第二、选择第一多狭缝光阑与第二多狭缝光阑作为角度测量装置的物,每个线阵ccd上三条纹光斑同时定位提高系统测量稳定性的同时,也提高了角度测量装置的测量精度;
41.第三、本发明中利用两路一维线阵ccd替换二维图像传感器,每只传感器的像元总数少,降低了对后续图像处理技术的要求,提高了测量装置的频响。
附图说明
42.图1是传统自准直角度测量装置的结构示意图。
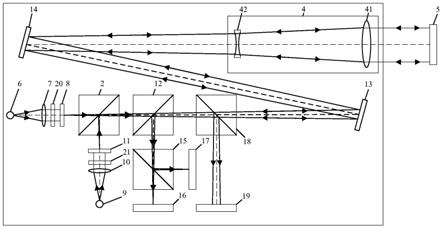
43.图2是本发明基于空间光调制的高稳定性纳弧度量级角度测量装置具体实施例一的结构示意图。
44.图3是具体实施例一中第一种多狭缝光阑8与11的结构与安装方向示意图。
45.图4是具体实施例一中第二种多狭缝光阑8与11的结构与安装方向示意图。
46.图5是具体实施例一中线阵ccd16与17的结构与安装方向示意图。
47.图6是本发明基于空间光调制的高稳定性纳弧度量级角度测量装置具体实施例二的结构示意图。
48.图7是本发明基于空间光调制的高稳定性纳弧度量级角度测量装置具体实施例三的结构示意图。
49.图8是本发明基于空间光调制的高稳定性纳弧度量级角度测量装置具体实施例四的结构示意图。
50.图中:1激光光源、2第一分光镜、3图像传感器、4准直物镜组、41第一凸透镜、42第一凹透镜、43第二凹透镜、44第四凸透镜、45第五凸透镜、5平面反射镜、6第一led光源、7第二凸透镜、8第一多狭缝光阑、9第二led光源、10第三凸透镜、11第二多狭缝光阑、12第二分光镜、13第一转折镜、14第二转折镜、15第三分光镜、16第一线阵ccd、17第二线阵ccd、18第四分光镜、19四象限位置探测器、20第一透射式空间光调制器、21第二透射式空间光调制器、22第三透射式空间光调制器。
具体实施例
51.下面结合附图对本发明具体实施例作进一步详细描述。
52.具体实施例一
53.本实施例是基于空间光调制的高稳定性纳弧度量级角度测量装置实施例。
54.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量装置,结构示意图如图2所示。该角度测量装置包括第一分光镜2、准直物镜组4(第一凸透镜41、第一凹透镜42)、平面反射镜5、第一led光源6、第二凸透镜7、第一多狭缝光阑8、第二led光源9、第三凸透镜10、第二多狭缝光阑11、第二分光镜12、第一转折镜13、第二转折镜14、第三分光镜15、第一线阵ccd16、第二线阵ccd17、第四分光镜18、四象限位置探测器19、第一透射式空间光调制器20、第二透射式空间光调制器21。
55.第一led光源6、第二led光源9分别经第二凸透镜7、第三凸透镜10准直后,再经第一透射式空间光调制器20、第二透射式空间光调制器21透射,平行入射于第一多狭缝光阑8以及第二多狭缝光阑11;以第一多狭缝光阑8与第二多狭缝光阑11作为物面,发出的两束光经第一分光镜2汇聚,再经第四分光镜18分束,分为反射光与透射光;反射光垂直入射于四象限位置光电探测器19;透射光经过第一转折镜13、第二转折镜14的转折后,垂直入射于准直物镜组4准直成平行光束;后经平面反射镜反射沿原路返回,经第二分光镜12反射后,由第三分光镜15分束,一路入射于第一线阵ccd16采集成像,一路入射于第二线阵ccd17采集成像;
56.所述第一多狭缝光阑8是由三条平行等距等宽的直线狭缝组成的透射式光阑,第一led光源6经第二凸透镜7准直后照射于第一多狭缝光阑8,因此三条平行等距等宽的直线光斑为该装置的一个物,其发出的光束为该装置的第一束测量光;第二多狭缝光阑11与第一多狭缝光阑结构8相同,但其狭缝与第一多狭缝光阑8的狭缝方向互相垂直,因此发出第二束测量光的物也为三条平行等距等宽的直线光斑,同时与第一束测量光束的光斑互相垂直;
57.或
58.所述第一多狭缝光阑8是由四条平行等距等宽的直线狭缝组成的透射式光阑,第一led光源6经第二凸透镜7准直后照射于第一多狭缝光阑8,因此四条平行等距等宽的直线光斑为该装置的一个物,其发出的光束为该装置的第一束测量光;第二多狭缝光阑11与第一多狭缝光阑结构8相同,但其狭缝与第一多狭缝光阑8的狭缝方向互相垂直,因此发出第二束测量光的物也为四条平行等距等宽的直线光斑,同时与第一束测量光束的光斑互相垂
直;
59.所述第一透射式空间光调制器20放置于第二凸透镜7与第一多狭缝光阑8之间,第二透射式空间光调制器21放置于第三凸透镜10与第二多狭缝光阑11之间,分别用于调制第一束测量光与第二束测量光,使第一束测量光、第二束测量光分别垂直入射于第一多狭缝光阑8与第二多狭缝光阑11;
60.所述第一线阵ccd16采集第一束测量光成像,传感器测量方向与第一多狭缝光阑8的狭缝方向互相垂直;第二线阵ccd17采集第二束测量光成像,传感器测量方向与第二多狭缝光阑11的狭缝方向互相垂直;
61.所述四象限位置探测器19设置在第四分光镜18后,采集第一束测量光与第二束测量光的实时漂移量;
62.所述准直物镜组4由第一凸透镜41与第一凹透镜42组成;第一线阵ccd16和第二线阵ccd17设置在准直物镜组4焦平面处,与第一多狭缝光阑8和第二多狭缝光阑11的位置共轭;当平面反射镜5与光轴垂直,且不产生角度变化的条件下,第一线阵ccd16与第二线阵ccd17所采集的光斑中心均在传感器几何中心位置;
63.所述第一转折镜13与第二转折镜14互相平行放置,均与主光轴存在一个固定小角度。
64.测量原理如下:
65.当被测物产生偏航角
ɑ
、俯仰角β的角度变化时,平面反射镜5也产生偏航角
ɑ
、俯仰角β的角度变化。入射于平面反射镜5上的两束测量光束,由于平反射面镜5随被测物产生偏航角、俯仰角的转动,因此经平面反射镜5反射的光束与原光束产生2
ɑ
、2β角的偏转。
66.控制第一led光源6以及第二led光源9以固定频率交替闪烁,此时第一线阵ccd16与第二线阵ccd17分别交替采集由第一led光源6以及第二led光源9发出的测量光;与传统自准直仪测量的原理一致,两路测量光束分别汇聚于第一线阵ccd16和第二线阵ccd17上,光束光斑与线阵ccd传感器中心位置分别产生位移s1与s2。
67.四象限位置探测器19实时测量第一led光源6以及第二led光源9的漂移量e1、e2,第一透射式空间光调制器20调整第一led光源6的光束方向,使光斑位移漂移量e1始终为0,第二透射式空间光调制器21调整第二led光源9的光束方向,使光斑位移漂移量e2始终为0。
68.且满足以下关系,s1
‑
e1=f
·
tan(2
ɑ
),s2
‑
e2=f
·
tan(2β),f为准直物镜组4的焦距。
69.因此根据第一线阵ccd16和第二线阵ccd17上的光斑与传感器中心位置的位移s1与s2,就可以计算出被测物产生偏航角
ɑ
、俯仰角β的角度变化。
70.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量方法实施例,包括以下步骤:
71.步骤a、将平面反射镜5固定至被测物表面;
72.步骤b、点亮第一led光源6以及第二led光源9,调整被测物以及平面反射镜5的位置,使第一线阵ccd16、第二线阵ccd17、四象限位置探测器19接收的光斑图像的几何中心均处于各传感器的中心位置;
73.步骤c、调整第一多狭缝光阑8与第二多狭缝光阑11的安装方向,使得第一线阵ccd16与第二线阵ccd17接收的光斑图像的方向分别与传感器的安装方向互相垂直;
74.步骤d、控制第一led光源6以及第二led光源9以固定频率交替闪烁,此时四象限位置探测器19直接接收由第一led光源6以及第二led光源9发出的两束测量光,第一线阵ccd16与第二线阵ccd17分别交替采集由第一led光源6以及第二led光源9发出后反射回的测量光;
75.步骤e、当四象限位置探测器19输出第一led光源6以及第二led光源9的光斑位移漂移量e1、e2时,第一透射式空间光调制器20调整第一led光源6的光束方向,使光斑位移漂移量e1始终为0,第二透射式空间光调制器21调整第二led光源9的光束方向,使光斑位移漂移量e2始终为0;
76.步骤f、当平面反射镜5随被测物产生偏航角与俯仰角转动时,第一线阵ccd16输出由第一多狭缝光阑8产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s1,第二线阵ccd17输出第二多狭缝光阑11产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s2;
77.步骤g、利用第一线阵ccd16光斑的位移s1,按照s1=f
·
tan(2
ɑ
)计算求得
ɑ
,其中
ɑ
为被测物产生偏航角的角度;利用第二线阵ccd17光斑的位移s2,按照s2=f
·
tan(2β)计算求得β,其中β为被测物产生俯仰角的角度。
78.本发明的创新点在于利用第一led光源6以及第二led光源9作为系统装置的光源,直接降低了由于光源漂移量带来的测量不稳定性;利用第二凸透镜7,第三凸透镜10对led光源发出的光进行准直,同时第一多狭缝光阑8与第二多狭缝光阑11对两路平行光进行调制,以第一多狭缝光阑8与第二多狭缝光阑11作为该系统装置的物,进一步降低角漂、平漂的影响;
79.同时利用四象限位置探测器19作为反馈探测模块,实时高精度的检测该装置中光源产生的平漂、角漂的漂移量;第一透射式空间光调制器20、第二透射式空间光调制器21作为反馈执行模块,根据所测量的漂移量实时进行闭环反馈控制,将光源出射的光斑始终控制在四象限位置探测器19的中心位置;从而实时将光源的平漂、角漂漂移量控制至十纳弧度量级,解决由于光束的漂移量限制自准直仪极限分辨力的问题;相较于利用偏转镜作为反馈执行模块的技术手段,空间光调制器在降低光源出射漂移量的同时,还可以对光源光强的空间幅值分布进行可编程控制,从而提高光源光强在空间分布上的稳定性,进一步提高本发明装置的测量稳定性;
80.本发明利用第一凸透镜41与第一凹透镜42组成准直物镜组4,且在利用第一线阵ccd16以及第二线阵ccd17作为系统装置的传感器。这种结构中,准直物镜组扩大角度测量装置准直物镜的焦距至3
‑
4倍,进而将整体系统的极限角度分辨力提升至纳弧度量级;两只一维的线阵ccd传感器在不降低传感器端极限位移分辨力的同时,将测量量程提高3
‑
4倍,从而解决由于扩大焦距带来量程降低的问题。最终实现系统在传统测量范围内达到纳弧度量级的高角度分辨力,突破自准直仪极限角度分辨力与测量量程之间的矛盾关系。
81.因此,同传统自准直角度测量装置相比,本发明具有在相同测量量程下,角度极限分辨力达到纳弧度量级以及高测量稳定性的技术优势。
82.具体实施例二
83.本实施例是基于空间光调制的高稳定性纳弧度量级角度测量装置实施例。
84.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量装置,结构示意图如
图6所示。在具体实施例一的基础上,本实施例在第一分光镜2与第二分光镜12之间加入第三透射式空间调制器22,代替第一透射式空间调制器20与第二透射式空间调制器21,作为反馈执行模块,如图6所示。
85.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量方法实施例,包括以下步骤:
86.步骤a、将平面反射镜5固定至被测物表面;
87.步骤b、点亮第一led光源6以及第二led光源9,调整被测物以及平面反射镜5的位置,使第一线阵ccd16、第二线阵ccd17、四象限位置探测器19接收的光斑图像的几何中心均处于各传感器的中心位置;
88.步骤c、调整第一多狭缝光阑8与第二多狭缝光阑11的安装方向,使得第一线阵ccd16与第二线阵ccd17接收的光斑图像的方向分别与传感器的安装方向互相垂直;
89.步骤d、控制第一led光源6以及第二led光源9以固定频率交替闪烁,此时四象限位置探测器19直接接收由第一led光源6以及第二led光源9发出的两束测量光,第一线阵ccd16与第二线阵ccd17分别交替采集由第一led光源6以及第二led光源9发出后反射回的测量光;
90.步骤e、当四象限位置探测器19输出第一led光源6以及第二led光源9的光斑位移漂移量e1、e2时,第三透射式空间光调制器22调整第一led光源6与第二led光源9的光束方向,使光斑位移漂移量e1、e2始终为0;
91.步骤f、当平面反射镜5随被测物产生偏航角与俯仰角转动时,第一线阵ccd16输出由第一多狭缝光阑8产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s1,第二线阵ccd17输出第二多狭缝光阑11产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s2;
92.步骤g、利用第一线阵ccd16光斑的位移s1,按照s1=f
·
tan(2
ɑ
)计算求得
ɑ
,其中
ɑ
为被测物产生偏航角的角度;利用第二线阵ccd17光斑的位移s2,按照s2=f
·
tan(2β)计算求得β,其中β为被测物产生俯仰角的角度。
93.具体实施例三
94.本实施例是基于空间光调制的高稳定性纳弧度量级角度测量装置实施例。
95.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量装置,结构示意图如图7所示。在具体实施例一的基础上,本实施例在第一分光镜2与第二分光镜12之间加入第三透射式空间调制器22,代替第一透射式空间调制器20与第二透射式空间调制器21,作为反馈执行模块;在准直物镜组4中,加入第二凹透镜43、第四凸透镜44以及第五凸透镜45,如图7所示。
96.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量方法实施例,包括以下步骤:
97.步骤a、将平面反射镜5固定至被测物表面;
98.步骤b、点亮第一led光源6以及第二led光源9,调整被测物以及平面反射镜5的位置,使第一线阵ccd16、第二线阵ccd17、四象限位置探测器19接收的光斑图像的几何中心均处于各传感器的中心位置;
99.步骤c、调整第一多狭缝光阑8与第二多狭缝光阑11的安装方向,使得第一线阵
ccd16与第二线阵ccd17接收的光斑图像的方向分别与传感器的安装方向互相垂直;
100.步骤d、控制第一led光源6以及第二led光源9以固定频率交替闪烁,此时四象限位置探测器19直接接收由第一led光源6以及第二led光源9发出的两束测量光,第一线阵ccd16与第二线阵ccd17分别交替采集由第一led光源6以及第二led光源9发出后反射回的测量光;
101.步骤e、当四象限位置探测器19输出第一led光源6以及第二led光源9的光斑位移漂移量e1、e2时,第三透射式空间光调制器22调整第一led光源6与第二led光源9的光束方向,使光斑位移漂移量e1、e2始终为0;
102.步骤f、当平面反射镜5随被测物产生偏航角与俯仰角转动时,第一线阵ccd16输出由第一多狭缝光阑8产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s1,第二线阵ccd17输出第二多狭缝光阑11产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s2;
103.步骤g、利用第一线阵ccd16光斑的位移s1,按照s1=f
·
tan(2
ɑ
)计算求得
ɑ
,其中
ɑ
为被测物产生偏航角的角度;利用第二线阵ccd17光斑的位移s2,按照s2=f
·
tan(2β)计算求得β,其中β为被测物产生俯仰角的角度。
104.本发明的创新点在于,在准直物镜组4中加入第二凹透镜43、第四凸透镜44以及第五凸透镜45,构成了新准直物镜组4。新准直物镜组的优化参数多,可以降低该装置光学系统像差对测量结果的影响,降低了整体装置的系统误差。
105.具体实施例四
106.本实施例是基于空间光调制的高稳定性纳弧度量级角度测量装置实施例。
107.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量装置,结构示意图如图8所示。在具体实施例一的基础上,本实施例在准直物镜组4与平面反射镜5之间,加入第四分光镜18与四象限位置探测器19作为反馈探测模块;在第一分光镜2与第二分光镜12之间加入第三透射式空间调制器22,代替第一透射式空间调制器20与第二透射式空间调制器21,作为反馈执行模块;在准直物镜组4中,加入第二凹透镜43、第四凸透镜44以及第五凸透镜45,如图8所示。
108.本实施例的基于空间光调制的高稳定性纳弧度量级角度测量方法实施例,包括以下步骤:
109.步骤a、将平面反射镜5固定至被测物表面;
110.步骤b、点亮第一led光源6以及第二led光源9,调整被测物以及平面反射镜5的位置,使第一线阵ccd16、第二线阵ccd17、四象限位置探测器19接收的光斑图像的几何中心均处于各传感器的中心位置;
111.步骤c、调整第一多狭缝光阑8与第二多狭缝光阑11的安装方向,使得第一线阵ccd16与第二线阵ccd17接收的光斑图像的方向分别与传感器的安装方向互相垂直;
112.步骤d、控制第一led光源6以及第二led光源9以固定频率交替闪烁,此时四象限位置探测器19直接接收由第一led光源6以及第二led光源9发出的两束测量光,第一线阵ccd16与第二线阵ccd17分别交替采集由第一led光源6以及第二led光源9发出后反射回的测量光;
113.步骤e、当四象限位置探测器19输出第一led光源6以及第二led光源9的光斑位移
漂移量e1、e2时,第三透射式空间光调制器22调整第一led光源6与第二led光源9的光束方向,使光斑位移漂移量e1、e2始终为0;
114.步骤f、当平面反射镜5随被测物产生偏航角与俯仰角转动时,第一线阵ccd16输出由第一多狭缝光阑8产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s1,第二线阵ccd17输出第二多狭缝光阑11产生的光束光斑位移值,其中光斑距离图像传感器中心位置为s2;
115.步骤g、利用第一线阵ccd16光斑的位移s1,按照s1=f
·
tan(2
ɑ
)计算求得
ɑ
,其中
ɑ
为被测物产生偏航角的角度;利用第二线阵ccd17光斑的位移s2,按照s2=f
·
tan(2β)计算求得β,其中β为被测物产生俯仰角的角度。
116.本发明的创新点在于在准直物镜组4与平面反射镜5之间,加入第四分光镜18与四象限位置探测器19作为反馈探测模块,其不仅实时测量两led光源光束的漂移量,同时也实时测量了光学系统不稳定造成的光束漂移量,通过闭环控制偏转镜对光源漂移量进行实时补偿,解决了光源漂移量以及光学系统不稳定带来的测量不稳定性的难题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。