1.本发明涉及医疗器械技术领域,尤其涉及一种医疗器械植入单元。
背景技术:
2.心脏瓣膜修复手术是目前主流的治疗方案。常采用植入式的组织夹合器械进行手术。每种夹合器械均需要配套的植入单元进行操作。当前,专利文献cn113456297a提供了一种有特殊优势的瓣膜组织夹合器,该夹合器的机械结构进行了重新设计,因其能够实现特殊的操作,导致其控制逻辑较为特殊。因此市面上无此夹合器的控制机构。此外,手术过程排出器械内的气体以避免栓塞现象的发生是医疗过程的重要操作步骤,但现有的操作系统在手术前需要复杂的操作才能完成气体排空。导致这一问题的主要原因是现有的排空结构设计不合理。另外,上夹片的弹性恢复力通常较小,操作人员需要根据经验来调整拉线的操作力度和行程控制,从而精确控制上夹片的位置,此操作对使用人员的技术水平和经验要求较高。因此,当前的控制机构采用的技术手段直接用于控制专利文献cn113456297a提及的夹合器存在诸多不便。
3.鉴于当前器械存在的控制问题和医护人员的迫切需求,本领域急需一种医疗器械植入单元以实现对所述夹合器的控制。
技术实现要素:
4.为克服上述问题,本发明提供一种医疗器械植入单元。能够降低对密封件的要求,并提供可靠和高效的气体排空路径。同时改进移动杆的结构,降低了对操作人员经验的要求。
5.为实现上述目的,根据本发明实施例的一个方面提供一种医疗器械植入单元,包括:
6.状态控制模块,其用于调整移动元件的位置以控制医疗器械的工作状态;
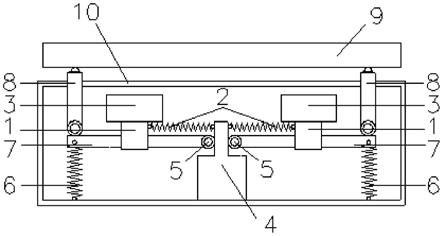
7.拉线控制模块,其用于拉动拉线以调整医疗器械的上夹片的角度;
8.所述的拉线控制模块包括一体式拉线元件,所述的一体式拉线元件包括鞘管和拉线管;其中,所述拉线管从鞘管的端部伸出并沿鞘管的轴线延伸,所述的鞘管与拉线管一体成形,拉线管的内孔与鞘管的第一内孔轴向贯通且内部穿设所述拉线。
9.可选的,所述的一体式拉线元件的拉线管设置在长管内且沿长管的轴线延伸,拉线管上用于穿出拉线的端部位于长管的旋钮腔内。
10.可选的,所述的鞘管还包括沿轴线延伸的第二内孔,所述状态控制模块的移动元件沿所述第二内孔滑动。
11.可选的,所述的拉线管与安装拉线管的通道壁间隙配合,所述拉线与拉线管的内孔间隙配合;安装拉线管的通道通过管路与三通阀连通。
12.可选的,所述的三通阀一端口为排空液体入口,流入所述入口的排空液体通过所述管路进入安装拉线管的通道以将空气推送至旋钮腔并从拉线管排入环境。
13.可选的,所述的长管包括旋钮、上夹片移动杆、压环和基座,所述的上夹片移动杆可移动的安装在所述基座内,所述的压环固定连接在基座的端部,压环、上夹片移动杆与基座之间的间隙处设置有密封件;旋钮设置在上夹片移动杆远离基座的端部,旋钮与上夹片移动杆配合面处设置有密封件。
14.可选的,所述的基座上设置有拉线固定点,拉线一端与上夹片固定,另一端穿过拉线管后固定在所述拉线固定点上。
15.可选的,所述的上夹片移动杆上靠近旋钮的端部上设置有轴杆,所述轴杆随上夹片移动杆的移动而移动,所述的拉线穿出拉线管后滑动挂绕在轴杆上。
16.可选的,所述的移动元件包括解脱管和连接杆,所述连接杆设置在解脱管内;通过控制解脱管的位置以控制连接杆的连接状态。
17.可选的,所述的鞘管的端部设置有多腔管接头,所述的解脱管和连接杆可沿多腔管接头的内孔移动。
18.可选的,所述的多腔管接头上还设置有拉线穿出孔,所述的拉线穿出孔一端与环境连通,另一端与鞘管上的第一内孔连通。
19.本发明的技术方案具有如下优点或有益效果:
20.(1)本发明采用一体式拉线元件设计方案,即将鞘管和拉线管一体制作,从而有效避免了现有技术的固定连接工艺造成的间隙,最终避免气体在排空过程的泄露问题,能够高效便捷的排出器械内的空气,消除气体栓塞的风险,加快气体排出速度。
21.(2)本发明的实施例中拉线管与安装拉线管的通道壁间隙配合,所述拉线与拉线管的内孔间隙配合能够形成连通的排空路径,且上述间隙配合保证了排空路径始终是开放状态,促进排空液体和器械内气体的顺畅流动,提高了气体排空的可靠性。
22.(3)由于采用一体式拉线元件,降低了对排空液体的泵送压力要求和流量要求,因此对拉线控制模块各处的密封件无特殊要求,通常仅需要设置常规的o型圈即可达到良好的密封要求,因此降低了对密封件的材料和性能要求,从而减小器械的制造成本。
23.(4)在移动杆的端部设置轴杆,轴杆在随着移动杆前后移动的过程中起到了动滑轮的作用,进而能够改变拉线的受力和位移量,即操作中需要2倍的拉力才可拉动上夹片,且仅需要一半的位移量即可完成上夹片夹合角度的调整。作用的力的改变使操作人员能够明显感受到拉线的移动,降低了对操作人员经验的要求。同时位移的缩短,提高了上夹片调节速度,进而提高了手术的效率。
附图说明
24.附图用于更好地理解本发明,不构成对本发明的不当限定。其中:
25.图1是本发明实施例的输送系统的使用状态示意图;
26.图2是本发明实施例的植入单元的剖视示意图;
27.图3是本发明实施例的植入单元的端部放大示意图;
28.图4是本发明实施例的一体式拉线元件的示意图;
29.图5是本发明实施例的一体式拉线元件的右视示意图;
30.图6是现有技术的拉线元件的鞘管示意图;
31.图7是本发明实施例的拉线控制模块的剖视示意图;
32.图8是本发明实施例的排空过程的液位示意图;
33.图9是本发明实施例的拉线与轴杆的装配示意图;
34.图10是现有技术的拉线受力和位移的示意图;
35.图11是本发明实施例的拉线受力和位移的示意图;
36.图12是本发明实施例的植入单元端部工作过程的示意图。
具体实施方式
37.以下结合附图对本发明的示范性实施例做出说明,其中包括本发明实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本发明的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
38.根据本发明实施例的一个方面,提供了一种医疗器械植入单元,所述的植入单元集成在对应的医疗器械输送系统中,并配合医疗系统使用。所述的输送系统可以将人体植入器械输送至目标组织,并对所述植入器械的各个部件进行控制,以使植入器械完成手术操作。如背景技术部分所述,本发明的一个实施例提供的植入单元尤其适用于夹合器械的控制,以解决背景技术部分提及的器械无匹配控制机构的问题。因此,本案引用专利文献cn113456297a的全部内容,并针对该医疗器械描述本发明的工作原理。
39.本文描述的植入单元用于控制夹合器械的动作,完成既定的手术操作。如图1所示,所述的夹合器械主要用于治疗心脏疾病。所述的心脏的剖视图中包括右心房10,三尖瓣环11,房间隔14,左心房15,二尖瓣瓣膜后瓣17,二尖瓣瓣膜前瓣19,左心室20和右心室21。所述的输送系统通过右骼静脉13和下腔静脉12进入右心房,再将输送鞘鞘管头部16伸入左心房,将夹合器械(或称作医疗器械)18送达目标位置。具体的,所述的输送系统包括至少一个输送单元,其用于为植入单元381提供输送通道。使用中输送单元的数量可以根据需要灵活设置,如图1所示的实施例中,夹合器械在到达目标位置的过程中,需要转两个弯,因此需要两个输送单元101、201,每个输送单元可分别完成一个调弯动作。为了便于区分,下文将输送单元101称作导引手柄101,输送单元201称作输送手柄201。实际使用中,如图1所示,导引手柄从大腿内侧下腔静脉进入,通过调整弯形穿过卵圆窝建立一个相对刚性的通路。并且导引手柄可以通过调整头部的弯曲形状达到目标位置。输送手柄的尖端的作用是从导引手柄内部穿过并从头部伸出,建立从卵圆窝上方到瓣膜垂直正上方的通路。输送手柄可以通过调整头部的弯曲形状达到目标位置。植入单元没有调弯功能,但是可以通过在输送手柄的内部伸缩,达到使瓣膜夹合器械靠近或者远离瓣环的目的,同时其主要作用是对夹合器械的控制。当存在多个输送单元时,每个输送单元可嵌套设置。实际上,主要是内层的输送单元的鞘管嵌套在外层的输送单元的鞘管内。采用多层嵌套结构,能够使内层的鞘管充分利用外层的已经调弯到位的鞘管的形状,便于夹合器械沿着弯曲的路径到达目标位置。植入单元381的一端嵌套在内层的所述输送通道内。可以理解的是,当仅存在一个输送单元时,植入单元的所述一端即位于该输送单元的输送通道内(即鞘管的内部通道);当存在多层输送单元时,植入单元的所述一端即位于最内层的输送单元的输送通道内(即鞘管的内部通道),植入单元的所述一端可沿所述输送通道延伸至目标位置。如图1所示的结构中,两个输送单元以及植入单元的管子是互相嵌套的,最外层为导引手柄管,中间层为输送手柄
管,内部为植入单元管。实际使用中,植入单元的所述一端需要与夹合器械连接,进而将夹合器械送达目标位置。
40.如图2和3所示的实施例中,植入单元的端部设置有多腔管接头323,所述的多腔管接头323内部为中空结构,其内部用于容纳植入单元的部分控制元件。所述的控制元件包括移动元件和拉线。所述的移动元件根据实际使用需要可以灵活调整,具体的可以包括解脱管322和连接杆321中的至少一个。如图2所示的一个实施例中,医疗器械植入单元包括状态控制模块330,其用于调整移动元件的位置进而控制医疗器械的工作状态。还包括拉线控制模块331,其用于拉动拉线以调整医疗器械的上夹片的角度。所述植入单元包括行程座和若干个旋钮(图中未示出),一个实施例中包括第一旋钮、第二旋钮和第三旋钮。第一旋钮用于调整行程座的位置以使医疗器械在目标位置打开或关闭夹持机构,其余旋钮分别用于调整行程座内相应器件以控制医疗器械的工作状态。可以理解的是,此种控制方式需要将用于控制夹合器械的各个元件或称作移动元件均连接在行程座上,从而通过控制行程座的位移,间接调整夹合器械的夹持机构或称作夹合机构打开或关闭。一个实施例中,连接在行程座上的器件可以是解脱管和连接杆,解脱管和连接杆单独的,独立的控制将分别实现不同操作目的。本发明通过第一旋钮单独控制行程座来控制医疗器械的打开和关闭,能够避免锁紧机构非必要的锁紧而影响手术操作。进而仅当其它旋钮控制行程座内对应器件才可控制器械对应机构动作,如锁紧机构的工作状态,提高了操作的安全性和便捷性。所述行程座包括连接杆行程座340、解脱管行程座342、下夹行程座343和下夹行程座螺杆333。其中,连接杆321的一端与所述医疗器械连接,连接杆的端部与医疗器械的连接点之间为可拆卸连接,在完成手术操作后,可控制解脱管离开所述的连接点位置,解除对所述可拆卸连接的约束,进而可控制连接杆与医疗器械分离。连接杆的另一端固定在连接杆行程座的连接点339上;因此在控制连接杆行程座的前后位置时,可以直接控制连接杆端部的位置,进而控制医疗器械在人体内的工作状态。解脱管322的一端滑动设置在所述医疗器械内部,所述的滑动设置使解脱管在医疗器械内部的位置可调,从而控制医疗器械的锁定机构在锁定状态和非锁定状态之间切换,达到控制医疗器械一种工作状态的目的。解脱管的另一端固定在解脱管行程座342的连接点341上;从而通过控制解脱管行程座的位置以调整解脱管在医疗器械内部的位置,进而控制医疗器械的工作状态。下夹行程座343分别与连接杆行程座340、解脱管行程座342滑动连接;从而可以控制连接杆行程座340和解脱管行程座342在下夹行程座内滑动,以调节位置,进而调整与其连接的解脱管和连接杆的位置。下夹行程座螺杆333的螺纹段与下夹行程座343的端部螺纹连接,从而通过转动下夹行程座螺杆以调整下夹行程座的位置。所述的下夹行程座的端部外侧设置有滑块,所述滑块与对应的滑槽配合以限制下夹行程座转动,使其仅能够前后移动。所述第一旋钮用于调整行程座的位置包括:转动第一旋钮控制下夹行程座螺杆转动实现对下夹行程座、连接杆行程座和解脱管行程座位置的同步调整,从而调整医疗器械的打开和关闭状态。所述的第一旋钮包括旋钮伞齿332,所述下夹行程座螺杆333包括与所述旋钮伞齿啮合的伞齿;通过上述的伞齿啮合关系,在转动第一旋钮时即可转动下夹行程座螺杆333,进而改变下夹行程座的位置。所述的植入单元还包括解脱管螺杆335和连接杆螺杆338;其中解脱管螺杆335的螺纹段与解脱管行程座螺纹连接;连接杆螺杆338的螺纹段与连接杆行程座螺纹连接。解脱管螺杆的左端与下夹行程座卡接定位,卡接定位使其仅能沿轴线转动,无法沿轴线移动,连接杆螺杆的左端与下夹行程座
卡接定位,该卡接定位使其仅能沿轴线转动,无法沿轴线移动。当解脱管螺杆和连接杆螺杆分别与对应的解脱管行程座和连接杆行程座螺纹连接后,将使解脱管行程座和连接杆行程座相对定位在下夹行程座内,仅当解脱管螺杆和连接杆行程座螺杆转动后,将使解脱管行程座和连接杆行程座分别轴向移动。为了避免解脱管行程座和连接杆行程座转动,解脱管行程座的外周设置有滑块,其与对应的滑槽配合以限制解脱管行程座转动;连接杆行程座的外周设置有滑块,其与对应的滑槽配合以限制连接杆行程座转动。第二旋钮包括旋钮伞齿334,所述的解脱管螺杆包括与第二旋钮的旋钮伞齿啮合的伞齿,详见附图2的解脱管螺杆的左侧;第三旋钮包括旋钮伞齿337,所述的连接杆螺杆包括与第三旋钮的旋钮伞齿啮合的伞齿,详见附图2中连接杆螺杆的左侧。通过第二旋钮或第三旋钮可以带动对应的伞齿转动,进而分别带动相应的解脱管螺杆或连接杆螺杆转动,进而分别控制对应的解脱行程座或连接杆行程座分别移动,最终达到分别调节解脱管或连接杆位置的目的。可选的,所述下夹行程座上还插设有安全单元336,所述安全单元用于限位解脱管向后运动的位置以避免连接杆的端部与所述医疗器械解除连接。进一步的,所述的拉线控制模块331包括一体式拉线元件。如图4和5所示的实施例中,所述的一体式拉线元件包括鞘管3032和拉线管3031;其中,所述拉线管从鞘管的端部伸出并沿鞘管的轴线延伸,所述的鞘管与拉线管一体成形,拉线管的内孔与鞘管的第一内孔3033轴向贯通且内部穿设所述拉线。所述的轴向贯通的通道可称作拉线腔,即容纳拉线的腔体。图5中展示了4个第一内孔,该设置的目的是穿设两根拉线,两根拉线分别对应固定一根上夹片。实际使用中,所述的拉线可以对折,对折后的拉线每一段分别穿设在一个第一内孔内。当然,也可以只设置两根拉线,且拉线在使用时不对折,直接穿入对应的内孔,此时拉线的一端直接固定在上夹片上,另一端固定在拉线控制模块上。如图6所示的现有技术中,鞘管和拉线管是独立制作的,然后将拉线管固定连接在鞘管的端部,上述的固定连接常因为制作工艺的不足而导致连接面上存在空隙,在排空过程总存在气体从空隙中溢出,无法完全排出,存在气体栓塞的风险,同时也降低了气体排出的效率。并且,连接时,鞘管上的孔与拉线管的管孔对接精度也难以控制,进而影响拉线穿入拉线腔,因此现有技术对连接工艺要求极高。相反,本发明采用一体化的设计方案,即将鞘管和拉线管一体制作,从而有效避免了上述的固定连接工艺造成的间隙,最终避免气体在排空过程的溢出问题,消除气体栓塞的风险,加快气体排出速度。所述的一体化制作实例性地可通过注塑等工艺一次制作出鞘管和拉线管。或者先制作出拉线管,且拉线管的长度大于鞘管的长度,然后在拉线管的外侧注塑所述的鞘管。无论采用何种制作工艺,目的是制作出一体式的拉线元件,从而消除鞘管与拉线管之间的间隙,进而提高气体排出的效率。
41.可选的,所述的一体式拉线元件的拉线管设置在长管内且沿长管的轴线延伸,拉线管上用于穿出拉线的端部位于长管的旋钮腔内。如图7所示的实施例中,其展示了拉线控制单元的细节,具体的右侧的控制机构为剖视图。所示的控制机构为两个,分别控制左右两个拉线,进而独立控制夹合器械的左侧上夹片和右侧的上夹片。所述的一体式拉线元件的拉线管沿着长管的轴线处的中空通道延伸安装,拉线管上用于穿出拉线的端部(即图7中的拉线管顶端)位于长管的旋钮腔内,所述的旋钮腔即旋钮3028的内部空腔。该设置的目的是尽量提高拉线管的顶部高度,从而在灌入排空液体时,能够利用液体将长管中空通道内的气体逐渐赶入旋钮腔,然后通过拉线腔排出到环境中。
42.可选的,所述的鞘管还包括沿轴线延伸的第二内孔3034,所述状态控制模块的移
动元件沿所述第二内孔滑动。具体的,如图2、3和5所示,解脱管和连接杆等移动元件均设置在鞘管的第二内孔中,并可沿内孔移动。所述的移动由前文描述的多个旋钮控制。
43.可选的,所述的拉线管与安装拉线管的通道壁间隙配合,所述拉线与拉线管的内孔间隙配合;安装拉线管的通道通过管路与三通阀连通。为了有效排除器械内的气体,如图7所示的实施例中,拉线控制模块包括三通阀,三通阀的底部设置有排空液体入口3030,三通阀的出口通过管路与拉线控制模块的基座3023连接,进而排空液体可通过所述管路进入安装拉线管的通道。为了有效且迅速的排除气体,本发明的一个实施例中需要设置顺次连通的排空通道。具体的,拉线管与安装拉线管的通道壁间隙配合,且所述拉线与拉线管的内孔间隙配合;通过上述两个间隙配合可使前文提到的进入安装拉线管的通道的液体沿着拉线管与安装拉线管的通道壁之间的间隙向旋钮3028处流动,直至液位面3027到达图8所示的位置。可以理解的是,图8中液位面上方是未排出的气体,而气体随着液位上升的过程逐步从图8所示的拉线管的端部进入拉线腔。由于拉线与拉线腔之间为间隙配合,所以气体的排空路径始终是开放的。当然,可以通过提高加工精度和配合精度等减小旋钮腔内的气体量。也可以通过排气时将器械放平排气以及头部竖起排气,并在两个姿态间反复操作达到排去旋钮腔内部的气体的目的。由此可见,本发明的实施例中拉线管与安装拉线管的通道壁间隙配合,所述拉线与拉线管的内孔间隙配合能够形成连通的排空路径,且上述间隙配合保证了排空路径始终是开放状态,保证了排空液体和气体的顺畅流动,提高了气体排空的可靠性。
44.可选的,所述的三通阀一端口为排空液体入口3030,流入所述入口的排空液体通过所述管路进入安装拉线管的通道以将空气推送至旋钮腔并从拉线管排入环境。
45.可选的,如图7所示的实施例中,所述的长管包括旋钮3028、上夹片移动杆3022、压环3029和基座3023,所述的上夹片移动杆可移动的安装在所述基座内,实践中可合理设置上夹片移动杆的外径以及基座的内孔内径,从而控制所述外径和内径的配合关系使上夹片移动杆可在基座的内孔内滑动,并且所述内孔对移动杆有引导作用。使用时,可通过上下拉动移动杆来改变拉线的位置,从而控制上夹片的夹持角度。上述的滑动过程会存在缝隙而导致气体泄漏,进而影响排空过程。因此,为了解决该问题,一个实施例中进一步将所述的压环固定连接在基座的端部,压环、上夹片移动杆与基座之间的间隙处再设置一个密封件,通过压环挤压密封件使密封件贴合在移动杆的外壁和基座的端面上从而封闭压环、上夹片移动杆以及基座之间的间隙,避免气体从三者之间的连接处泄漏而影响排空。进一步的,旋钮设置在上夹片移动杆远离基座的端部,旋钮与上夹片移动杆配合面处设置有密封件。通过该密封件进一步封闭旋钮与上夹片移动杆之间的间隙。需要说明的是,本发明此处提到的密封件无特殊要求,通常仅需要设置常规的截面为圆形等o型圈即可。可以理解的是,相对于唇形密封、迷宫密封等密封件,o型圈等截面形状简单的密封圈通过常规的注塑即可成形,且对材料性能要求低。也就是说,本发明仅需要采用o型圈等成本低的密封件即可达到所需的密封要求,降低了对密封件的材料和性能要求,从而减小器械的制造成本。需要说明的是,本发明正是由于采用一体式拉线元件,从而降低了系统的排空液体的泵送压力,同时也降低了排空液体的流量要求,进一步降低了对密封件的要求。与此相反,现有技术中由于鞘管与拉线管之间存在间隙,需要的排空压力大和排空时间长,提高泵送的流体流量以达到快速排空的目的,对器械的各个部分的密封要求极高,进而需要采用复杂的、成本高的密
封件才能获得所需的密封要求。
46.可选的,所述的基座上设置有拉线固定点,拉线一端与上夹片固定,另一端穿过拉线管后固定在所述拉线固定点上。该设置能够快速的将拉线固定在基座上,提高了手术效率。
47.可选的,如图7和9所示的实施例中,所述的上夹片移动杆上靠近旋钮的端部上设置有轴杆3021,所述轴杆3021随上夹片移动杆的移动而移动,所述的拉线3002穿出拉线管后滑动挂绕在轴杆上。具体的可以采用图9所示的方式,将拉线从轴杆的一侧穿出,再从轴杆的另一侧穿回,使轴杆顶推拉线,进而拉线可沿着轴杆的表面滑动。通过上述设置可以明显发现,轴杆在随着移动杆前后移动的过程中起到了动滑轮的作用,进而能够改变拉线的受力和位移量,即操作中需要2倍的拉力才可拉动上夹片,且仅需要一半的位移量即可完成上夹片夹合角度的调整。作用的力的改变使操作人员能够明显感受到拉线的移动,降低了对操作人员经验的要求。同时位移的缩短,提高了上夹片调节速度,进而提高了手术的效率。需要说明的是,上述位移和力的变化均是相对于传统的无轴杆的设计方案来讲的。具体的如图10所示的无轴杆的方案中,拉线的右端直接与移动杆固定,此时拉线的两端受力平衡状态下,左端的上夹片施加的拉力f和右端的驱动力f相等,并且拉线与上夹片的连接点的位移量s与驱动力的施力点的位移量s也相同。相反,采用本发明图11所示的一个实施例所示的结构,在受理平衡的状态下,拉线与上夹片之间的固定点以及基座上的拉线固定点3001均提供拉力f,相应的需要在移动杆上施加2f的驱动力,同时也可以根据几何关系计算出移动杆仅需移动0.5s的位移量,即可导致拉线与上夹片之间的固定点产生s的位移量。
48.可选的,所述的移动元件包括解脱管和连接杆中的至少一个,所述连接杆设置在解脱管内;通过控制解脱管的位置以控制连接杆的连接状态。所述的鞘管的端部设置有多腔管接头,所述的解脱管和连接杆可沿多腔管接头的内孔移动。如前文所述,可转动第一旋钮使解脱管和连接杆同步推到最前端,使所述医疗器械的夹合部件完全打开,且医疗器械处于解锁状态。如图12所示,当连接杆321与医疗器械的夹合部件对手件350连接后,控制解脱管迁移并抵靠在所述对手件的台阶上后,即可约束连接杆321与对手件的连接点,同时也将使医疗器械的锁定机构处于非锁定状态。此时转动第一旋钮使解脱管和连接杆同步推到最前端,将使医疗器械的夹合部件完全打开。当转动第一旋钮使解脱管和连接杆同步向后运动时,将使所述医疗器械的夹合部件逐渐闭合,由于解脱管相对于锁定机构的位置未改变,其依然挤压锁定机构的解锁部,使医疗器械处于解锁状态。当然,也可转动第二旋钮,单独使解脱管向后运动,以解除解脱管对锁定结构的解锁部的挤压作用,使医疗器械从解锁状态切换至锁定状态,并处于锁定状态,此时由于对手件的位置未改变,所述医疗器械的夹合部件保持闭合状态。可以理解是,当对医疗器械的夹持状态不满意时,可以反向转动第二旋钮,并单独控制解脱管向前移动,使医疗器械解锁,此时所述医疗器械的夹合部件保持闭合状态。在完成上述操作后,可在医疗器械解锁状态下,重复操作第一旋钮,反复调整医疗器械的夹持状态以获得所需的效果。当继续旋转第二旋钮使解脱管继续后退,即可解除解脱管对连接杆与对手件之间的连接点的约束,从而使连接杆与对手件可分离。进而撤出夹合器械的输送系统。
49.可选的,所述的多腔管接头上还设置有拉线穿出孔,所述的拉线穿出孔一端与环境连通,另一端与鞘管上的第一内孔连通。实践中,为了方便排出器械内的气体,而采用在
多腔管接头上设置相应的排气通孔,所述的排气通孔也称作拉线穿出孔,该孔用于穿出拉线,进而可将穿出的拉线固定在上夹片上。当然,拉线与拉线穿出孔之间也为间隙配合,且拉线穿出孔的一端与前文描述的拉线腔贯通,从而使气体穿过拉线腔后进入多腔管接头上的拉线穿出孔,并从拉线穿出孔排出至大气,最终实现气体排空的目的。
50.上述具体实施方式,并不构成对本发明保护范围的限制。本领域技术人员应该明白的是,取决于设计要求和其他因素,可以发生各种各样的修改、组合、子组合和替代。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。