基于rfid的路侧停车监测预警方法及其系统
技术领域
1.本发明涉及一种预警方法及其系统,尤其涉及一种基于rfid的路侧停车监测预警方法及其系统。
背景技术:
2.随着汽车保有量的增加使得车辆停车、道路通行压力都极为增大,而部分人图自身的方便,往往会选择在道路的路侧停车,无论是行车道路、消防通道等,路侧停车都会造成影响,比如:对于消防通道,在消防通道的路侧停车,当消防事故发生后,严重妨碍消防特种车辆对事故现场的救援,而对于通行道路,则会影响正常通行的车辆通行,或者影响公交车进站等,而目前没有一种有效的手段对路侧占道停车进行有效监管。
3.而在某些城市,为了解决停车问题,也会在部分道路上允许停车,但是,这种停车占用了公共资源,但是现有技术中同样无法进行有效的监管。
4.因此,为了解决上述技术问题,继续提出一种有效的技术手段。
技术实现要素:
5.有鉴于此,本发明的目的是提供一种基于rfid的路侧停车监测预警方法及其系统,能够对路侧停车的车辆进行准确监测,并能够获取准确的车辆身份信息和图像信息,从而形成一个完整的证据链,便于后续停车计费亦或是违停处罚提供准确的数据支持。
6.本发明提供的一种基于rfid的路侧停车监测预警方法,包括以下步骤:
7.s1.在被监测道路设置监测节点,所述监测节点包括rfid读写器和高清摄像头;
8.s2.rfid读写器周期性地向设置于车辆的电子标签发送信息读取指令,电子标签向rfid读写器反馈记录在电子标签内的车辆身份信息;
9.s2.rfid读写器接收电子标签反馈的车辆身份信息,并且rfid读写器记录电子标签反馈信号的功率;
10.s3.判断在设定周期数内是否均接收到同一电子标签反馈的车辆身份信息,如是,则判断该电子标签每次反馈信号的功率是否相同,如相同,则判定当前车辆为路侧停车,并控制高清摄像头采集当前车辆的图像信息;
11.s4将车辆身份信息和车辆的图像信息上传,判断当前道路是否为可停车道路,如是,从rfid读写器第一次获取到电子标签信息时进行计时直至rfid读写器最后一次获取到电子标签信息为止,并在该时间段内对目标车辆进行计费;如果当前道路为禁止停车道路,根据上传的信息进行预警。
12.进一步,步骤s3中还包括:当设定周期数内,电子标签每次反馈信号的功率不同时,则判断在设定周期数内第一次和最后一次的电子标签反馈信号的信号功率差值,并根据信号功率差值判断当前车辆的移动速度,当移动速度小于设定速度值时,则判断当前车辆为疑似路侧停车;
13.获取道路车流平均速度信息,如车流的平均速度大于设定速度值时,则确定当前
车辆为路侧停车,控制高清摄像头采集目标车辆的图像信息,同时将车辆身份信息和车辆的图像信息上传。
14.进一步,根据电子标签反馈信号的功率差值确定车辆的移动速度包括:
15.建立湿度-悬浮颗粒浓度-电磁信号衰减系数映射表;
16.获取当前监测节点的所处环境的湿度以及悬浮颗粒浓度,根据当前环境的湿度查找湿度-悬浮颗粒浓度-电磁信号衰减系数映射表,确定当前环境的电磁信号衰减系数;
17.构建电磁信号传播衰减模型:
18.其中,p0为电子标签发送信号的初始功率,p1为rfid读写器接收到电子标签反馈信号的功率,δ为在空气湿度和悬浮颗粒影响下的电磁信号的衰减系数,λ为电子标签反馈信号的波长,l为电子标签与rfid读写器之间的距离;
19.根据在设定周期数内第一次和最后一次电子标签反馈的信号功率解出电子标签与rfid读写器之间的两个距离值,然后依据三角函数确定出车辆的移动距离;
20.根据车辆的移动距离以及设定周期的时间长度得出车辆的移动速度。
21.相应地,本发明还提供了一种基于rfid的路侧停车监测预警系统,包括:监测节点、远程服务器和智能终端;
22.所述监测节点包括rfid读写器、高清摄像头、处理器、环境检测模块以及车速探测器;
23.所述rfid读写器,用于周期性地获取设置于车辆的电子标签中记录的车辆身份信息,并获取电子标签每次反馈信号的功率;
24.高清摄像头,用于获取被确定为路侧停车的目标车辆的图像信息;
25.环境检测模块,用于获取当前监测节点所处环境的湿度以及悬浮颗粒浓度信息;
26.所述车速探测器,用于采集当前道路的平均车速并输出至处理器;
27.所述处理器,用于接收rfid读写器输出的车辆身份信息、电子标签的反馈信号功率、图像信息、平均车速信息以及湿度和悬浮颗粒浓度信息,并根据所接收到的信息判断当前车辆是否为路侧停车,如是,则将所接收到的信息传输至远程服务器;
28.所述远程服务器,用于根据处理器上传的信息判断当前车辆是否为违章路侧停车,并根据判断结果向智能终端输出预警结果。
29.进一步,所述远程服务器包括中心服务器、交管服务器和市政服务器;
30.所述中心服务器分别于交管服务器和市政服务器通信连接,所述交管服务器和市政服务器与智能终端通信连接,所述中心服务器与处理器通信连接;
31.当车辆为路侧停车时,所述中心服务器则判断当前道路是否为可停车道路,如是,则中心服务器向市政服务器发送车辆身份信息、图像信息以及停车时间,市政服务器通过获取的信息进行计费,并将计费预警信息发送至智能终端;
32.如果当前道路为禁止停车道路,则中心服务器将车辆身份信息、图像信息以及停车时间发送至交管服务器,交管服务器根据所接收到的信息对目标车辆进行处罚,并将处罚预警信息发送至智能终端。
33.进一步,所述处理器根据如下方法判断目标车辆是否路侧停车:
34.判断在设定周期数内是否均接收到同一电子标签反馈的车辆身份信息,如是,则判断该电子标签每次反馈信号的功率是否相同,如相同,则判定当前车辆为路侧停车,并控制高清摄像头采集当前车辆的图像信息;
35.当设定周期数内,电子标签每次反馈信号的功率不同时,则判断在设定周期数内第一次和最后一次的电子标签反馈信号的信号功率差值,并根据信号功率差值判断当前车辆的移动速度,当移动速度小于设定速度值时,则判断当前车辆为疑似路侧停车;
36.获取道路车流平均速度信息,如车流的平均速度大于设定速度值时,则确定当前车辆为路侧停车,控制高清摄像头采集目标车辆的图像信息。
37.进一步,所述处理器根据电子标签反馈信号的功率差值确定车辆的移动速度包括:
38.建立湿度-悬浮颗粒浓度-电磁信号衰减系数映射表;
39.获取当前监测节点的所处环境的湿度以及悬浮颗粒浓度,根据当前环境的湿度查找湿度-悬浮颗粒浓度-电磁信号衰减系数映射表,确定当前环境的电磁信号衰减系数;
40.构建电磁信号传播衰减模型:
41.其中,p0为电子标签发送信号的初始功率,p1为rfid读写器接收到电子标签反馈信号的功率,δ为在空气湿度和悬浮颗粒影响下的电磁信号的衰减系数,λ为电子标签反馈信号的波长,l为电子标签与rfid读写器之间的距离;
42.根据在设定周期数内第一次和最后一次电子标签反馈的信号功率解出电子标签与rfid读写器之间的两个距离值,然后依据三角函数确定出车辆的移动距离。
43.进一步,所述智能终端为智能手机。
44.本发明的有益效果:通过本发明,能够对路侧停车的车辆进行准确监测,并能够获取准确的车辆身份信息和图像信息,从而形成一个完整的证据链,便于后续停车计费亦或是违停处罚提供准确的数据支持。
附图说明
45.下面结合附图和实施例对本发明作进一步描述:
46.图1为本发明的流程示意图。
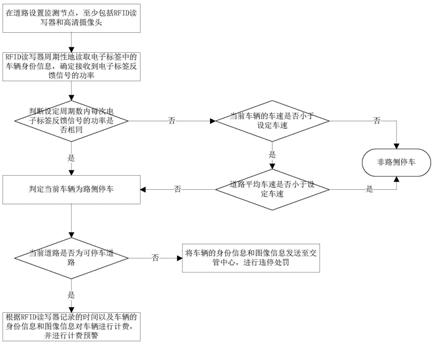
47.图2为本发明的结构示意图。
48.图3为本发明确定车辆行驶距离示意图。
具体实施方式
49.以下结合说明书附图对本发明做出进一步详细说明:
50.本发明提供的一种基于rfid的路侧停车监测预警方法,包括以下步骤:
51.s1.在被监测道路设置监测节点,所述监测节点包括rfid读写器和高清摄像头;
52.s2.rfid读写器周期性地向设置于车辆的电子标签发送信息读取指令,电子标签向rfid读写器反馈记录在电子标签内的车辆身份信息;
53.s2.rfid读写器接收电子标签反馈的车辆身份信息,并且rfid读写器记录电子标
签反馈信号的功率;rfid读写器没收到一次电子标签反馈的车辆身份信息,均记录接收到的时间,并将该时间发送至处理器,车辆的身份信息包括车牌号、车辆类型、车辆使用性质、车主身份信息、车主联系方式等;当然,为了防止道路正常行驶车辆的干扰,通过对rfid读写器的读写方向、rfid读写器的发送信号的功率等设置,将rfid读写器的读写区域限定在道路的路侧区域,当然,根据rfid读写器的读写范围,比如rfid读写器能够接收到100米长的道路的车辆信息,那么,每个100米设置一个监测节点,从而防止监测遗漏。
54.s3.判断在设定周期数内是否均接收到同一电子标签反馈的车辆身份信息,如是,则判断该电子标签每次反馈信号的功率是否相同,如相同,则判定当前车辆为路侧停车,并控制高清摄像头采集当前车辆的图像信息;
55.s4将车辆身份信息和车辆的图像信息上传,判断当前道路是否为可停车道路,如是,从rfid读写器第一次获取到电子标签信息时进行计时直至rfid读写器最后一次获取到电子标签信息为止,并在该时间段内对目标车辆进行计费;如果当前道路为禁止停车道路,根据上传的信息进行预警,通过上述方法,能够对路侧停车的车辆进行准确监测,并能够获取准确的车辆身份信息和图像信息,从而形成一个完整的证据链,便于后续停车计费亦或是违停处罚提供准确的数据支持。
56.本实施例中,步骤s3中还包括:当设定周期数内,电子标签每次反馈信号的功率不同时,则判断在设定周期数内第一次和最后一次的电子标签反馈信号的信号功率差值,并根据信号功率差值判断当前车辆的移动速度,当移动速度小于设定速度值时,则判断当前车辆为疑似路侧停车;
57.获取道路车流平均速度信息,如车流的平均速度大于设定速度值时,则确定当前车辆为路侧停车,控制高清摄像头采集目标车辆的图像信息,同时将车辆身份信息和车辆的图像信息上传,通过上述方式,能够准确确定出车辆是否为路侧占道停车,排除了因为道路拥堵而出现误判的情形,避免了传统方式中计算不准确以及处理过程复杂等缺陷,而且还能够有效防止套牌车辆等情况,从而确保处理结果的准确性。
58.本实施例中,根据电子标签反馈信号的功率差值确定车辆的移动速度包括:
59.建立湿度-悬浮颗粒浓度-电磁信号衰减系数映射表;该映射关系表通过实际试验进行测量得出,为现有技术;
60.获取当前监测节点的所处环境的湿度以及悬浮颗粒浓度,根据当前环境的湿度查找湿度-悬浮颗粒浓度-电磁信号衰减系数映射表,确定当前环境的电磁信号衰减系数;
61.构建电磁信号传播衰减模型:
62.其中,p0为电子标签发送信号的初始功率,p1为rfid读写器接收到电子标签反馈信号的功率,δ为在空气湿度和悬浮颗粒影响下的电磁信号的衰减系数,λ为电子标签反馈信号的波长,l为电子标签与rfid读写器之间的距离;
63.根据在设定周期数内第一次和最后一次电子标签反馈的信号功率解出电子标签与rfid读写器之间的两个距离值,然后依据三角函数确定出车辆的移动距离;
64.根据车辆的移动距离以及设定周期的时间长度得出车辆的移动速度,如图3所示:假定rfid读写器以2秒为一个读写周期,那么设定的周期数为5个周期,监测节点的读写器
第一次读取到车辆的电子标签的信息时间为t1,车辆处于位置a,车辆在设定周期数最后一次读取到电子标签的信息的时间为t1 10s,那么,车辆从a行驶到b时,所用时间为10s,c点为rfid读写器在路侧区域的垂直投影,极为参考点,当车辆为a时,监测节点、c点和a点形成一个三角形,当车辆为b时,则b点、监测节点以及c点形成一个三角形,通过上述的衰减模型分别解出l1和l2,a点的距离为l1,监测节点到b点的距离为l2,而且监测节点到参考点c的距离h为已知,因此,通过两个直角三角形可以确定出a-监测检点之间的连线以及b-监测节点之间的连线的夹角α,然后利用三角函数解出a点到b点的距离s,从而根据时间和距离得出车辆从a点到b点之间的车速,通过上述方法,确定出的车速的准确率高,为后续处理的准确性提供保障。
65.相应地,本发明还提供了一种基于rfid的路侧停车监测预警系统,包括:监测节点、远程服务器和智能终端;其中,智能终端采用智能手机;
66.所述监测节点包括rfid读写器、高清摄像头、处理器、环境检测模块以及车速探测器;其中,监测节点通过设置于道路的龙门架结构的支撑架或者悬臂梁结构的支撑架进行安装;
67.所述rfid读写器,用于周期性地获取设置于车辆的电子标签中记录的车辆身份信息,并获取电子标签每次反馈信号的功率;
68.高清摄像头,用于获取被确定为路侧停车的目标车辆的图像信息;
69.环境检测模块,用于获取当前监测节点所处环境的湿度以及悬浮颗粒浓度信息;其中,环境检测模块包括湿度传感器和颗粒物传感器,用于检测空气中的湿度和颗粒物的浓度;
70.所述车速探测器,用于采集当前道路的平均车速并输出至处理器;
71.所述处理器,用于接收rfid读写器输出的车辆身份信息、电子标签的反馈信号功率、图像信息、平均车速信息以及湿度和悬浮颗粒浓度信息,并根据所接收到的信息判断当前车辆是否为路侧停车,如是,则将所接收到的信息传输至远程服务器;
72.所述远程服务器,用于根据处理器上传的信息判断当前车辆是否为违章路侧停车,并根据判断结果向智能终端输出预警结果。当然,监测节点还可以设置现场预警器,包括语音提示以及显示器,用于通过语音以及显示器对违停车辆进行提示。
73.具体地,所述远程服务器包括中心服务器、交管服务器和市政服务器;
74.所述中心服务器分别于交管服务器和市政服务器通信连接,所述交管服务器和市政服务器与智能终端通信连接,所述中心服务器与处理器通信连接;
75.当车辆为路侧停车时,所述中心服务器则判断当前道路是否为可停车道路,如是,则中心服务器向市政服务器发送车辆身份信息、图像信息以及停车时间,市政服务器通过获取的信息进行计费,并将计费预警信息发送至智能终端;
76.如果当前道路为禁止停车道路,则中心服务器将车辆身份信息、图像信息以及停车时间发送至交管服务器,交管服务器根据所接收到的信息对目标车辆进行处罚,并将处罚预警信息发送至智能终端,其中,处理器和中心服务器通过无线通信模块进行通信连接,比如4g模块、5g模块等;通过上述结构,能够对路侧停车的车辆进行准确监测,并能够获取准确的车辆身份信息和图像信息,从而形成一个完整的证据链,便于后续停车计费亦或是违停处罚提供准确的数据支持。
77.本实施例中,所述处理器根据如下方法判断目标车辆是否路侧停车:
78.判断在设定周期数内是否均接收到同一电子标签反馈的车辆身份信息,如是,则判断该电子标签每次反馈信号的功率是否相同,如相同,则判定当前车辆为路侧停车,并控制高清摄像头采集当前车辆的图像信息;
79.当设定周期数内,电子标签每次反馈信号的功率不同时,则判断在设定周期数内第一次和最后一次的电子标签反馈信号的信号功率差值,并根据信号功率差值判断当前车辆的移动速度,当移动速度小于设定速度值时,则判断当前车辆为疑似路侧停车;
80.获取道路车流平均速度信息,如车流的平均速度大于设定速度值时,则确定当前车辆为路侧停车,控制高清摄像头采集目标车辆的图像信息。
81.所述处理器根据电子标签反馈信号的功率差值确定车辆的移动速度包括:
82.建立湿度-悬浮颗粒浓度-电磁信号衰减系数映射表;
83.获取当前监测节点的所处环境的湿度以及悬浮颗粒浓度,根据当前环境的湿度查找湿度-悬浮颗粒浓度-电磁信号衰减系数映射表,确定当前环境的电磁信号衰减系数;
84.构建电磁信号传播衰减模型:
85.其中,p0为电子标签发送信号的初始功率,p1为rfid读写器接收到电子标签反馈信号的功率,δ为在空气湿度和悬浮颗粒影响下的电磁信号的衰减系数,λ为电子标签反馈信号的波长,l为电子标签与rfid读写器之间的距离;
86.根据在设定周期数内第一次和最后一次电子标签反馈的信号功率解出电子标签与rfid读写器之间的两个距离值,然后依据三角函数确定出车辆的移动距离。
87.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。