1.本发明属于物流调度技术领域,具体涉及一种无人物流车的调度方法。
背景技术:
2.汽车智能驾驶技术的发展,使无人物流成为可能。通过在车内设置idu控制器、摄像头和激光雷达等车载设备实现无人驾驶。用于物流的无人驾驶车即为无人物流车。无人物流车拉动物料拖斗可自动拉动物料从库房到达装配车间指定的停靠位。无人物流车运行时通过车载终端实时广播车辆的位置坐标数据和状态数据;调度平台的云服务器实时接收各物流车的广播数据,根据各物流车的位置和状态按照一定的调度算法向各物流车发送控制指令,实现对各线路上的物流车的调度。
3.现有的调度算法是每条线路只设置始点和终点两个站点。由于每条线路至少有2台以上的车辆在运行,且终点空车位数量有限,在终点经常出现由于多辆车排队使道路堵塞影响其它物流车正常运行的现象。
技术实现要素:
4.为了解决现有技术中存在的上述问题,本发明提出一种无人物流车的调度方法,通过在线路上设置始点和终点以外的临时停靠站点,解决道路堵塞问题。
5.为实现上述目的,本发明采用如下技术方案:
6.一种无人物流车的调度方法,包括以下步骤:
7.步骤1,在每条物流线路的始点和终点x之间设置临时停靠点,确定每个临时停靠点允许停放物流车的数量(即停车位的总数);
8.步骤2,实时接收物流车广播的位置数据,根据物流车的当前位置数据计算终点x及临时停靠点当前时刻停放物流车的数量及空车位的数量;
9.步骤3,如果某条物流线路的终点x有空车位,所述线路始点即将发车的物流车a正常发车;
10.步骤4,如果所述线路的终点x没有空车位,查找有空车位的临时停靠点y,将所述物流车a的终点改为y后发车;
11.步骤5,如果终点x和所有临时停靠点均没有空车位,停止发车,等待出现空车位;
12.步骤6,如果终点x出现空车位,将所述物流车a的终点改为终点x。
13.与现有技术相比,本发明具有以下有益效果:
14.本发明通过在物流线路的始点和终点之间设置临时停靠点,当终点无空车位、临时停靠点有空车位时,将始点即将发车的物流车的终点修改为有空车位的临时停靠点后再发车;当终点和所有临时停靠点均无空车位时不发车;当终点出现空车位时,再将所述物流车的终点还原,能够使到达终点的物流车均有停车位,既可避免终点发生道路堵塞,又可使始点不会出现物流车滞留现象。
附图说明
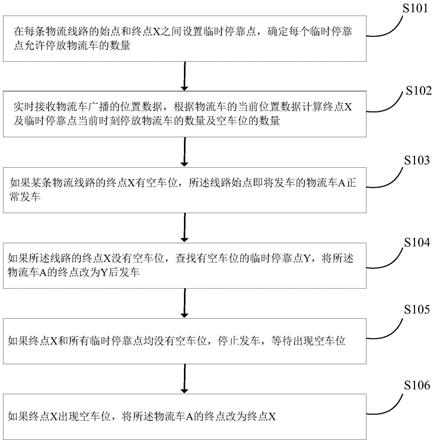
15.图1为本发明实施例一种无人物流车的调度方法的流程图。
具体实施方式
16.下面结合附图对本发明作进一步详细说明。
17.本发明实施例一种无人物流车的调度方法,流程图如图1所示,所述方法包括以下步骤:
18.s101、在每条物流线路的始点和终点之间设置临时停靠点,确定每个临时停靠点允许停放车辆的数量;
19.s102、实时接收物流车广播的位置数据,根据物流车的当前位置数据计算终点x及临时停靠点当前时刻停放物流车的数量及空车位的数量;
20.s103、如果某条物流线路的终点x有空车位,所述线路始点即将发车的物流车a正常发车;
21.s104、如果所述线路的终点x没有空车位,查找有空车位的临时停靠点y,将所述物流车a的终点改为y后发车;
22.s105、如果终点x和所有临时停靠点均没有空车位,停止发车,等待出现空车位;
23.s106、如果终点x出现空车位,将所述物流车a的终点改为终点x。
24.在本实施例中,步骤s101主要用于在物流线路中增设临时停靠点。增加的临时停靠点的数量根据经验确定,与只设置始点和终点时线路终点堵车的严重程度有关,与每个停靠点最多可设置的空车位数量有关,目的是尽量避免出现终点和临时停靠点都没有停车位的情况。
25.在本实施例中,步骤s102主要用于确定当前时刻终点及临时停靠点空车位的数量。物流车运行时通过车载终端实时广播本车的位置坐标数据;调度平台的云服务器实时接收各物流车的广播数据,并根据各物流车的坐标数据和终点及每个临时停靠点的坐标数据,计算终点及每个临时停靠点停靠的物流车的数量,进而得到空车位的数量。
26.在本实施例中,步骤s103~s106主要用于根据终点及每个临时停靠点的空车位数量确定调度方案。共有三种情况。第一种情况是终点有空车位,这种情况下始点即将发车(等待发车且排在最前面)的物流车可以正常发车,向终点行驶(中间不停靠)。值得说明的是,本实施例始点的物流车按先后顺序依次发车;第二种情况是终点没有空车位,但某个或某几个临时停靠点有空车位,这种情况下先将即将发车的物流车的终点改为某个临时停靠点的某个空车位,然后再发车,向修改后的终点行驶;第三种情况是终点和所有临时停靠点均无空车位,这种情况下为了避免出现堵塞,就不能发车,等待出现空车位。到达终点的物流车还要返回,因此,终点会再次出现空车位。一旦终点出现空车位,就将已修改终点的物流车还原终点。
27.在本实施例由于增加临时停靠点,能够使到达终点的物流车均有车位,既可避免终点发生道路堵塞,又可使始点不会出现物流车滞留现象。
28.作为一种可选实施例,所述s104的临时停靠点y是距离终点x最近的有空车位的临时停靠点。
29.在本实施例中,当有空车位的临时停靠点多于1个时,选距离终点x最近的有空车
位的临时停靠点为修改后的终点。
30.作为一种可选实施例,所述s106将距离终点x最近的物流车a的终点改为终点x。
31.在本实施例中,当终点x出现空车位时,如果修改终点的物流车a不只1个,还原距离终点x最近的物流车a的终点。
32.上述仅对本发明中的几种具体实施例加以说明,但并不能作为本发明的保护范围,凡是依据本发明中的设计精神所做出的等效变化或修饰或等比例放大或缩小等,均应认为落入本发明的保护范围。
技术特征:
1.一种无人物流车的调度方法,其特征在于,包括以下步骤:步骤1,在每条物流线路的始点和终点x之间设置临时停靠点,确定每个临时停靠点允许停放物流车的数量;步骤2,实时接收物流车广播的位置数据,根据物流车的当前位置数据计算终点x及临时停靠点当前时刻停放物流车的数量及空车位的数量;步骤3,如果某条物流线路的终点x有空车位,所述线路始点即将发车的物流车a正常发车;步骤4,如果所述线路的终点x没有空车位,查找有空车位的临时停靠点y,将所述物流车a的终点改为y后发车;步骤5,如果终点x和所有临时停靠点均没有空车位,停止发车,等待出现空车位;步骤6,如果终点x出现空车位,将所述物流车a的终点改为终点x。2.根据权利要求1所述的无人物流车的调度方法,其特征在于,所述步骤4的临时停靠点y是距离终点x最近的有空车位的临时停靠点。3.根据权利要求1所述的无人物流车的调度方法,其特征在于,所述步骤6将距离终点x最近的物流车a的终点改为终点x。
技术总结
本发明公开一种无人物流车的调度方法。所述方法包括:设置临时停靠点,确定每个临时停靠点允许停放车辆的数量;实时接收物流车广播的位置数据,根据物流车的当前位置数据计算终点X及临时停靠点当前时刻停放车辆的数量及空车位的数量;如果某物流条线路的终点X有空车位,所述线路始点即将发车的物流车A正常发车;如果终点X没有空车位,查找有空车位的临时停靠点Y,将所述物流车A的终点改为Y后发车;如果终点X和所有临时停靠点均没有空车位,停止发车,等待出现空车位;如果终点X出现空车位,将所述物流车A的终点改为终点X。本发明能够使到达终点的物流车均有停车位,既可避免终点发生道路堵塞,又可使始点不会出现物流车滞留现象。象。象。
技术研发人员:班定东 赵小羽 张亮 李雪松 陈炼松
受保护的技术使用者:上汽通用五菱汽车股份有限公司
技术研发日:2020.10.09
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。