1.本发明涉及一种无人机集群随机接入方法,属于无人机通信领域。
背景技术:
2.无人机集群由大量小型化、廉价、高机动的无人机节点组成,节点间通过无线自组织网络技术实现互联,构建成为功能分布化的智能体系,其显著的作战效能、低廉的成本、较小的毁伤损失、易于大批量装备等优点,是未来无人机发展的主要趋势。无人机集群协同对抗的这种分布式控制模式突破了单一无人机的局部感知和任务执行的限制,在军事、农业体系、城市救援、环境勘测、智慧城市等应用领域中发挥了重要作用。
3.目前主流的无人机集群组网技术有中继网络、星形组网和网状自组网。中继网络中散布着多种类型的飞机,既可单个飞机飞行,同时也可以编组成网,通过中继无人机将孤立的节点整合到战斗网络中;星形组网中,通信以地面基站为中心,无人机终端分散在地面基站周围,由中心地面基站完成对周围无人机的控制,实现组网,适合无人机数量较少同时执行任务范围较小的场景;在网状网络中,每个无人机都是具有相同功能的节点,无人机之间进行通信时,需要进行一跳或多跳路由,当无人机点无法在一跳中链接到地面中心站时,它可以通过到中心站的多跳路由来实现整个网络中所有节点的互连,但是由于这种网络的半集中特性,使得通信架构没有很好的健壮性。
4.由于无人机集群结构的复杂性、行为的多样性,单个无人机的载荷限制无法完成集群协同控制,基于集中式或半集中式层次架构的集群协同决策控制方法不再适用。另外,由于无人机集群依靠无人机局部的通信能力实现协同信息共享来完成对抗任务,对集群个体之间的通信协议也提出了轻量级要求。目前的无人机集群的接入方法趋于复杂、计算量大、演示代价大,导致无人集群协同对抗算法无法在实际的无人机集群上进行演示和验证,且小型化的随机接入方法并不能够有效的解决在大量节点下的频繁接入问题。因此,设计一种能够满足大量无人机频繁接入并且减少接入冲突,并能完成角色优化配置的方法,成为实现无人机集群应用的关键。
技术实现要素:
5.针对无人机集群工作过程中单元无人机需要频繁接入、退出的需求,并且解决无人机集群作战中角色变换、任务更改带来的动态再分配问题及多节点同时发送接入请求的冲突规避问题,本发明公开一种无人机集群随机接入方法,目的是解决无人机集群节点的部署、使用、入网、退网、撤收的不确定性,明确节点任务类型和角色分工,实现实时调整,避免在通信过程中出现多个接入请求冲突问题。
6.本发明的目的是通过以下技术方案实现的:
7.本发明公开一种无人机集群随机接入方法,是一种按需分配的分布式高动态随机接入技术,包括两部分:一是设计标准化消息互认格式,对于无人机集群无中心的互联互通网络,采用时分多址技术(tdma),把时间分割成不同的时间片段(帧),再把帧分割成不同的
时隙,再将每个时隙唯一地分配给某个无人机节点,每个节点只能在分配给它的时隙内进行操作;二是设计随机接入机制,避免接入冲突。发送和接收采用应答机制,发射过程通过广播时隙分配表通告当前接入的平台数量及预约时隙位置,待接入节点可在预约时隙发送接入请求,时统节点对接入请求做出判断,如果准许接入则通过广播通告更新后的时隙分配表,如果禁止接入则通过广播通知待接入节点继续等待或执行其它操作。任务过程中,伴随任务计划、任务进程及战略战术的变化使用高效地时隙分配方法以提升tdma协议的性能,快速调整各无人机担任的角色,对其占用的资源进行公平、高效的再分配。
8.本发明公开的一种无人机集群随机接入方法,包括如下步骤:
9.步骤1:随机接入协议建立集群节点无线链路。
10.子集群网络采用单信道模式,将控制信道的控制指令融合到数据信道之中,即在发送时隙时需要发送时钟基准、时隙分配表、当前节点的状态数据、其他节点的控制指令、当前节点的任务数据。在一个节点发送时,其它所有节点均处于接收状态。
11.针对不同应用环境下集群网络不同无人机类型遥控、遥测及侦察数据的组网传输需求,从顶层规划异型平台消息格式,统一信息交互机制,解耦物理接口。为了兼容不同数据发生率和包长度,适用于多个型号协议,采用分组业务、封装业务等分包方式使用固定长度和可变长度相结合的弹性封装帧协议,依据vmf消息(varible message foema,可变报文格式)和ccsds(consultative committee for space data systems,国际空间数据系统咨询委员会)协议标准,采用通用帧框架的方式,将固定长度数据帧放入数据链通用传输帧。
12.步骤2:按需分配随机接入准则保证无人机节点顺利入网。
13.发送和接收采用应答机制,发射过程通过广播时隙分配表通告当前接入的平台数量及预约时隙位置,待接入节点可在预约时隙发送接入请求,时统节点对接入请求做出判断,如果准许接入则通过广播通告更新后的时隙分配表,如果禁止接入则通过广播通知待接入节点继续等待或执行其它操作。接收帧结构设计中每复帧的最后一个时隙为固定分配时隙,用于接收时隙预约请求,发送帧结构设计中第一个时隙发送时隙分配信息信令,每个时隙划分为1~k个子时隙,k值大小由簇内中心节点根据网络负载动态分配。
14.步骤3:针对无人机集群协同作战系统,使用一种改进的广义比例公平(generalized proportional fairness,gpf)方法实现无人机集群网络通信系统资源调度策略。
15.在系统初始化引入不同比值的比例因子,通过gpf算法灵活调节系统吞吐量与用户速率公平性间不同程度的折中,此外,gpf算法还可以克服传统pf算法只能实现短期用户间速率公平性的缺点,实现长期的公平性。
16.gpf算法引入的比例因子为和,通过调整a和b的取值来灵活调节系统吞吐量和用户速率公平性间不同程度的折中。信道被化分成s个ru,每个ru由数目相等的单元时隙构成,时域多用户传输以帧为单位。用户在每个ru上选取具有最大广义比例公平因子的用户m进行传输。广义比例公平因子的定义如下:
[0017][0018]
每个ru上最佳用户m
*
的选取规则如下:
[0019][0020]
其中,表示第t帧用户m在ru s上实现的瞬时速率,与用户m在第t帧内的信道条件有关,rm(t)表示截止到第t帧时,滑动窗口t时长内用户m的历史平均速率,rm(t)的表达式如下:
[0021][0022]
式中,rm(t-1)表示用户m在上一帧的实际传输速率,t表示滑动窗口的时长。系统初始化时,比例因子a、b的比值选取影响着每帧的调度结果,不同的a/b值反映了系统吞吐量和用户速率公平性间不同程度的折中。
[0023]
步骤4:通过设置gpf调度方法中的a,b配置数值,优化吞吐量性能。
[0024]
步骤5:应用时隙分配方法在较短的时间内完成时隙调度,实现无冲突的数据传输,最大化地提升信道利用率。
[0025]
tdma协议时隙分配算法的完整过程包括时隙选择、时隙申请、时隙确认以及时隙释放。
[0026]
时隙选择:在tdma中,时隙资源被标记为四种状态,并且采用二进制来表示,其中00表示当前时隙为空闲状态,01表示当前时隙被本节点占用,10表示当前时隙被主节点占用,11表示当前时隙被其他子节点占用。
[0027]
允许容纳的最大节点数量为n,单个时帧的数据时隙总量为m,则每个节点都可以使用一个n
×
m的二维矩阵t=[t
ij
]
n*m
来存储时隙分配信息:
[0028][0029]
节点在选择时隙的时候,只需要查询本地的时隙分配矩阵,然后对的时隙进行申请占用。
[0030]
时隙申请与确认:tdma协议的时隙分配是一个动态交互的过程,其动态性主要体现在时隙申请和时隙确认两个阶段。在时隙申请阶段,tdma循环监视每个节点与其他节点在通信链路上的业务负载,然后计算出节点在当前时帧所需要的数据时隙数量,计算公式如下:
[0031]
b=(1-θ)*d*r
[0032][0033]
公式中,θ为数据时隙开销比,d为单个数据时隙时长,r为节点数据传输速率,b为单个数据时隙所能传输的比特数。公式中,n为总节点数量,ti为节点向主节点i发送的业务负载量,sn为节点所需要的数据时隙总量。
[0034]
若节点所需的数据时隙数量sn》0时,则该节点需要在本地的二维时隙分配矩阵中
依次申请m个空闲的数据时隙,并将自己的时隙申请信息通过req分组发送给主节点。收到req分组的主节点将时隙申请信息存储在本地的二维时隙矩阵中。
[0035]
时隙释放:应用动态时隙分配协议,满足节点对于时隙资源的占用非固定要求。当网络中的节点由于失效或者业务中断而不再使用时隙资源时,对其占用的时隙进行释放,以便于其它发送业务的节点获取更多时隙资源。分别采用tdma协议主动时隙释放和被动时隙释放的方式来应对业务中断和节点失效这两类情况。主动时隙释放解决业务中断问题,被动时隙释放解决节点失效情况。通过子节点主动发送释放信息和主节点直接发送释放信息两种情况完成时隙释放。
[0036]
有益效果:
[0037]
1、本发明公开的一种无人机集群随机接入方法,兼容固定时隙tdma方式和动态时隙tdma方式的通用型动态时隙分配协议,设计最小固定时隙时帧结构,其包含固定时隙个数,形成固定结构的时帧模块。而通过时帧模块的简单堆叠,即可实现动态时隙方式,从而显著降低动态时隙分配算法的复杂度,又同时避免固定时隙所带来拓扑结构不灵活的问题
[0038]
2、本发明公开的一种无人机集群随机接入方法,对各节点接入请求时间做随机振荡处理,即节点在预备接入网络时刻起,随机延迟n个复帧周期发送请求,这样即使某一时刻出现碰撞,也能够以大概率在下一次接入时避免冲突,大大降低持续碰撞无法接入的概率。
[0039]
3、一般pf算法只考虑较短时间内用户的历史平均速率,而本发明gpf算法考虑的滑动窗口时长远大于一个发射周期时长,从而保证了长期的用户间速率公平性。
[0040]
4、针对不同应用环境下集群网络不同无人机类型遥控、遥测及侦察数据的组网传输需求,本发明公开的一种无人机集群随机接入方法,从顶层规划异型平台消息格式,统一信息交互机制,解耦物理接口,提高组通信的体系性、兼容性、扩展性、继承性和互操作性。
附图说明
[0041]
图1是本发明的时隙预留随遇接入示意示意图;
[0042]
图2是本发明中的无人机节点随机入网流程示意图;
[0043]
图3是本发明实例中多节点入网冲突解决示意图;
[0044]
图4是本发明实例中不同a,b配置下系统吞吐量图;
[0045]
图5是本发明实例中长期速率公平性vs系统吞吐量图;
[0046]
图6是本发明实例中短期速率公平性vs帧数图;
[0047]
图7是本发明实例中无人机节点资源动态调整流程图;
[0048]
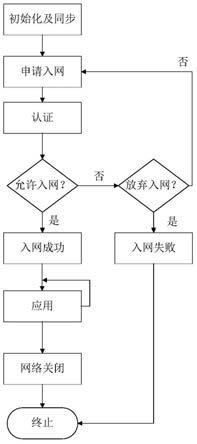
图8是本发明实例中网络运行流程图。
具体实施方式
[0049]
下面将结合附图和实施例对本发明加以详细说明。同时也叙述了本发明技术方案解决的技术问题及有益效果,需要指出的是,所描述的实施例仅旨在便于对本发明的理解,而对其不起任何限定作用。
[0050]
如图2所示,本实施例公开的一种无人机随机接入方法,已经应用于无人机集群协同作战领域,并与解放军某部合作于浙江舟山进行无人机随机接入方法可行性飞行验证,
验证结果与方法内容设计吻合,该方法有效解决了当下无人机协同对抗中集群多点接入冲突和优化资源分配问题。
[0051]
本实施例公开的实例中无人机集群通信网络整体运行的主要流程如图8所示,主要包括网络初始化、申请、认证、入网和网络关闭等阶段。
[0052]
网络初始化是为子节点提供足够的初始化信息,使之能够在网络上交换信息,并运行处理的过程。网络初始化过程通过初始化参数加载来完成,主要的初始化参数包括传输参数、网络参数、本平台参数等。各子节点完成初始化后,根据设置好的网络参数启动网络运行。普通无人机节点加入网络运行的过程:子节点在网络初始化后,接收时间消息,完成网络同步;子节点准备入网时,向主节点发送入网申请消息;主节点收到申请消息后,判断是否允许该子节点入网,并进行应答;子节点根据应答结果进行处理:如果应答消息为不允许入网,再次尝试入网或放弃入网;如果应答消息为允许入网,则按照网络协议收发消息,入网成功。
[0053]
网络关闭:任务完成后,无人机集群主控节点执行网络关闭操作,发送网络管理消息给在网子节点。在网子节点接收到消息后,在指定的停止运行时间停止网络中的所有通信。
[0054]
如图2所示,本实施例公开的无人机集群随机接入方法,具体实现步骤如下:
[0055]
步骤1:随机接入协议建立集群节点无线链路。
[0056]
使用兼容固定时隙tdma方式和动态时隙tdma方式的通用型动态时隙分配协议,采用最小固定时隙时帧结构,其包含固定时隙个数,形成固定结构的时帧模块。通过时帧模块的简单堆叠,即可实现动态时隙方式,从而大大降低了动态时隙分配算法的复杂度,又同时避免了固定时隙所带来拓扑结构不灵活的问题。为了兼容不同数据发生率和包长度,适用于多个型号协议,采用分组业务、封装业务等分包方式设计固定长度和可变长度相结合的弹性封装帧协议。依据vmf消息和ccsds(consultative committee for space data systems,国际空间数据系统咨询委员会)协议标准,采用通用帧框架的方式,将固定长度数据帧放入数据链通用传输帧。
[0057]
分包传输帧包含前导码、帧识别码、密码同步字和数据帧源包。源包由包主导头和包数据域组成,两者都是必需的,且无缝排列。包主导头的长度固定,包数据域长度可变。在实际应用中源包长度要恰当,源包太短,传送效率低;源包太长,要被截为多端装入传送帧,操作复杂,而且容易因为错误而丢失整包,包长不大于三个传送帧数据域。
[0058]
通用时隙主要用于传输业务数据、控制指令和状态信息等通用型数据。而公用时隙主要用于紧急信令和随机入网申请,因此,公用时隙帧结构要比通用时隙的帧结构短得多。
[0059]
步骤2:按需分配随机接入准则保证无人机节点顺利入网。
[0060]
图1中每一个时隙节点的状态用(状态(state),目标(target))表示,state表示在时隙s中节点的状态,target表示在时隙s中节点要进行发送或者接收数据分组的一跳邻居节点。因此,在时隙s中,节点的状态可以分为七种:
[0061]
传输状态(transport)——在时隙s,节点发送数据分组到邻居节点a:(state=transport,target=a)。如果节点传送的分组是广播分组,则target=broadcast;
[0062]
接收状态(receive)——在时隙s,从邻居节点b接收数据分组:(state=receive,
target=b);
[0063]
传输阻塞状态(block_t)——在时隙s,在邻居节点中至少有一个节点正从其他节点接收数据分组,而且没有邻居节点正在传送分组;
[0064]
接收阻塞状态(block_r)——在时隙s,在邻居节点中至少存在一个节点正向其他节点发送分组,而且没有邻节点正在接收分组;
[0065]
传输接收阻塞状态(block_tr)——在时隙s,在邻居节点中至少存在一个节点正在向其他节点发送分组,除此之外,至少存在一个邻居节点正在从其他节点接收分组;
[0066]
碰撞(collision)——节点在接收分组时检测到一个碰撞;
[0067]
空闲状态(idle)——节点空闲,没有邻居节点处于数据分组收发状态。
[0068]
需要说明的是,目标(target)仅在前两个状态有意义,即在传输状态以及接收状态,此外,这些节点状态之间是相互独立的,一个节点在一个时隙里只能处于其中某一种状态,可以认为在节点不向外发送数据的时隙都可以称为被动时隙。
[0069]
图2针对多个无人机节点同时提交接入申请的冲突问题,对各节点接入请求时间做随机振荡处理,即节点不能每次都发送接入申请,而是在预备接入网络时刻起,随机延迟n个复帧周期发送请求(n为一定范围内的随机数)。流程图如图3所示。
[0070]
步骤3:针对无人机集群协同作战系统,使用一种改进的广义比例公平(generalized proportional fairness,gpf)方法实现无人机集群网络通信系统资源调度策略。
[0071]
集群网络改进型广义比例公平调度方法的工作步骤如下:
[0072]
(1)当无人机集群节点有资源申请要求时,计算该节点的通信质量要求指标值,将其包含于无人机发送的信息中;
[0073]
(2)集群网络通信系统资源的调度器根据无人机终端传输过来的信道探测参考信号,对每个信道质量进行评价;
[0074]
(3)集群网络通信系统资源的调度器根据信道质量信息对频谱分配系统进行估计;
[0075]
(4)根据频谱分配系数计算每个集群节点数据传输速率;
[0076]
(5)集群网络通信系统的资源调度器综合考虑无人机的瞬时数据传输速率和无人机公平性估计每个集群节点在每个信道的优先级;
[0077]
(6)选择优先级最高的集群节点进行集群网络通信系统资源调度,将该信道划分给优先级最高的无人机节点;
[0078]
(7)从候选信道集合的列表中删除已经分配的信道;
[0079]
(8)如果候选信道集合的列表为空,表示全部集群网络通信系统资源调度已经分配完毕,则结束算法的支持,不然返回步骤(3)继续进行集群网络通信系统进行资源调度与分配。
[0080]
按照上述步骤,根据无人机集群节点不同的资源类型、不同优先级、不同的时延和不同的丢包率,采用相应的业务数据包传输特性参数值。对于实时性要求较高的业务,调度器对该业务承载保证最低的比特速率;而对实时性要求不高的业务,调度器无需对该承载保证最低的比特速率,所以其在网络拥挤的情况下,业务需要承受降低速率的安排。在此将设计默认承载和专用承载,默认承载用于数据量小且实时性地的业务数据;当默认承载无
法满足实时性要求时启用专用承载,以满足速率和时延要求。
[0081]
步骤4:通过设置gpf调度方法中的a,b配置数值,优化吞吐量性能。
[0082]
通过对gpf调度算法方针进行不断优化,结合图4、图5给出的无人机分簇子群节点数目为30时,系统吞吐量与长期(δt=30sec)用户速率公平性的关系。可以看出,gpf调度器随着a/b比值的增加速率公平性下降,当a=0,b=1时,gpf算法保障最低平均速率用户传输,因此系统具有很高的速率公平性,但是吞吐量很低;同时还可以观察到,传统的pf(a=1,b=1)调度器在用户速率公平性方面也是不公平的。为了实现吞吐量和用户速率公平性的折中,gpf算法参数设置a=1,b=3或a=1,b=2较为合适。
[0083]
图6展示了无人机集群组网通信网络中,当无人机分簇子群节点数目为30时,短期用户速率公平性随帧数的变化。从图中可以看出,gpf调度器相较于mt调度器(即a=1,b=0时),能很大程度上改善用户短期速率公平性,而且飞机间速率公平性能甚至比rr调度算法还要好。除此之外,不同a,b配置下的gpf调度器,其性能也不一样,传统pf(a=1,b=1)调度器性能稍微比a=1,b=2配置下的gpf调度器差。
[0084]
步骤5:应用时隙分配算法在较短的时间内完成时隙调度,实现无冲突的数据传输,最大化地提升信道利用率。
[0085]
在时隙确认阶段,为了确保时隙占用不出现冲突,主节点需要针对各节点时隙申请情况进行统一的仲裁,仲裁规则如下:
[0086]
1)如果数据时隙s只被一个子节点i申请占用,则将时隙s分配给该节点i使用。
[0087]
2)如果数据时隙s被多个子节点同时申请占用,则时隙s优先分配给传输高优先级业务的子节点使用;若子节点传输的业务优先级相同,则时隙s优先分配给节点id较小的子节点使用。
[0088]
仲裁结束后,主节点在确认时隙内将仲裁的结果通过ack分组广播给各子节点。收到ack分组的节点需要更新自己本地的二维时隙分配矩阵,为下一个时帧的时隙申请做准备。
[0089]
时隙释放阶段
[0090]
tdma协议分别采用主动时隙释放和被动时隙释放的方式来应对业务中断和节点失效这两类情况。
[0091]
1)主动时隙释放
[0092]
为每个节点设置业务定时器,假设节点i在业务定时器过期时仍没有数据传输,则该节点之前所占用的数据时隙需要全部被释放。此时,节点i轮询本地的二维时隙分配矩阵,将第i行中值为1的时隙状态全部修改为0,其余的时隙状态不变。然后,等下一个控制时隙到来,将本地的二维时隙分配矩阵通过req分组发送给主节点。
[0093]
2)被动时隙释放
[0094]
假若主节点在特定时间内没有收到其发送的hello分组,则默认节点i退出系统。此时,各节点需要做如下的操作:将节点i从信息表中删除;轮询各自的二维时隙分配矩阵,将第i行的时隙状态全部重新置为0;等下一个控制时隙到来,将各自的二维时隙分配矩阵通过req分组发送给主节点。
[0095]
数据时隙一旦被释放,便回到了空闲状态,因此可以被网络中的节点重新申请占用。tdma通过时隙释放过程有效地提高了时隙复用率,从而避免了信道资源的浪费,时隙调
整流程如图7所示。
[0096]
至此,完成无人机集群接入方法。
[0097]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
