1.本实用新型属于清洁机器人技术领域,具体涉及一种倒垃圾机器人及清洁系统。
背景技术:
2.现有技术中,cn109998423a于2019年7月12日公开了一种自洗拖帕扫地机,该方案中扫地机可夹持扫地器(扫地机器人)后驱动扫地器翻转从而倾倒扫地器中的垃圾。但由于扫地器的重量远远大于尘盒的重量,因此该方案的能耗较高。
技术实现要素:
3.有鉴于此,本实用新型提供了一种倒垃圾机器人及清洁系统,用以解决现有的扫地机夹持扫地机器人整机倾倒垃圾的方案能耗较高的问题。
4.本实用新型采用的技术方案是:
5.第一方面,本实用新型提供了一种倒垃圾机器人,所述倒垃圾机器人包括:
6.抓取装置,用于抓取清洁机器人的集尘机构;
7.移动装置,与所述抓取装置连接,所述移动装置移动所述抓取装置及所述集尘机构至倒垃圾位置;
8.驱动装置,与所述移动装置连接;所述驱动装置在所述移动装置移动所述抓取装置及所述集尘机构至倒垃圾位置时,驱动所述集尘机构倾倒垃圾;
9.其中,所述移动装置包括水平运动机构及竖直运动机构,所述竖直运动机构驱动所述抓取装置在竖直方向上运动;所述水平运动机构驱动所述竖直运动机构在水平面上直线运动。
10.作为上述倒垃圾机器人的优选方案,所述倒垃圾机器人还包括支架,所述水平运动机构设于所述支架上。
11.作为上述倒垃圾机器人的优选方案,所述倒垃圾机器人还包括基座,所述基座上设有充电机构,所述支架设于所述基座上部。
12.作为上述倒垃圾机器人的优选方案,所述水平运动机构包括第一导轨和第二导轨,所述第一导轨和所述第二导轨均设于所述支架上;所述第一导轨的导向方向与所述第二导轨的导向方向平行,且所述第二导轨的导向方向与水平面平行,所述竖直运动机构在所述第一导轨和所述第二导轨上运动。
13.作为上述倒垃圾机器人的优选方案,所述水平运动机构还包括第一驱动电机和第一皮带,所述第一驱动电机通过所述第一皮带带动所述竖直运动机构在所述第一导轨和所述第二导轨上运动。
14.作为上述倒垃圾机器人的优选方案,所述水平运动机构还包括第一带轮和第二带轮,所述第一驱动电机设于所述支架上,且所述第一驱动电机的输出轴与第一带轮连接,所述第二带轮转动连接在所述支架上;
15.所述第一皮带套设在所述第一带轮和所述第二带轮上,所述第一皮带与所述竖直
运动机构连接。
16.作为上述倒垃圾机器人的优选方案,所述竖直运动机构包括第三导轨,所述第三导轨的导向方向与竖直方向平行,所述抓取装置在所述第三导轨上运动。
17.作为上述倒垃圾机器人的优选方案,所述竖直运动机构还包括第二驱动电机和第二皮带,所述第二驱动电机通过所述第二皮带带动所述抓取装置在所述第三导轨上运动。
18.作为上述倒垃圾机器人的优选方案,所述抓取装置包括电磁吸附机构,所述集尘机构相对所述电磁吸附机构设有待磁吸件,所述电磁吸附机构与所述待磁吸件磁吸。
19.第二方面,本实用新型提供了一种清洁系统,所述清洁系统包括上述任意一种倒垃圾机器人。
20.综上所述,本实用新型的有益效果如下:
21.本实用新型实施例提供的倒垃圾机器人及清洁系统中,抓取装置仅仅是抓取了清洁机器人的集尘机构后,移动装置移动抓取装置及集尘机构至倒垃圾位置,再后驱动装置驱动集尘机构倾倒垃圾;由于集尘机构的重量是远远低于清洁机器人重量的,而本实施中仅需要抓取清洁机器人集尘机构便能实现垃圾倾倒,因此相较于现有技术来说也降低了倾倒清洁机器人中垃圾的能耗。
附图说明
22.为了更清楚地说明本实用新型实施例的技术方案,下面将对本实用新型实施例中所需要使用的附图作简单地介绍,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,这些均在本实用新型的保护范围内。
23.图1是本实用新型实施例2中的尘盒结构示意图;
24.图2是本实用新型实施例2中的尘盒另一个视角的结构示意图;
25.图3是本实用新型实施例2中的尘盒的上盖剖开后的剖视示意图;
26.图4是图3中锁扣剖开后的剖视示意图;
27.图5是本实用新型实施例2中的尘盒隐藏顶盖后的结构示意图;
28.图6是本实用新型实施例2中的尘盒隐藏上盖后的结构示意图;
29.图7是图6中储尘件剖开后的剖视示意图;
30.图8是本实用新型实施例2中的尘盒隐藏包覆件后的结构示意图;
31.图9是本实用新型实施例2中尘盒隐藏上盖后另一个视角的结构示意图;
32.图10是本实用新型实施例2中的尘盒中上盖及储尘件剖开后的剖视示意图;
33.图11是本实用新型实施例2中倒垃圾机器人抓取尘盒时的结构示意图;
34.图12是本实用新型实施例2中倒垃圾机器人倾倒尘盒时的结构示意图;
35.图13是本实用新型实施例2中抓取装置隐藏抓取上盖后的结构示意图;
36.图14是本实用新型实施例2中驱动装置结构示意图;
37.图15是本实用新型实施例2中驱动装置隐藏检测支架后的结构示意图;
38.图16是本实用新型实施例2中抓取装置下盖的结构示意图;
39.图17是本实用新型实施例2中抓取装置及驱动装置作用于尘盒上盖的结构示意图;
40.图18是本实用新型实施例2中移动装置的结构示意图;
41.图19是本实用新型实施例2中旋转升降机构的结构示意图;
42.图20是本实用新型实施例2中基座中隐藏外壳后的结构示意图;
43.图21是本实用新型实施例2中支撑臂顶部的结构示意图;
44.图22是本实用新型实施例2中旋转升降机构隐藏外壳后的结构示意图;
45.图23是本实用新型实施例2中升降平台的结构示意图;
46.图24是本实用新型实施例3中倒垃圾机器人的结构示意图;
47.图25是本实用新型实施例3中抓取装置的结构示意图;
48.图26是图25中的凸轮结构示意图;
49.图27是本实用新型实施例3中的移动装置结构示意图;
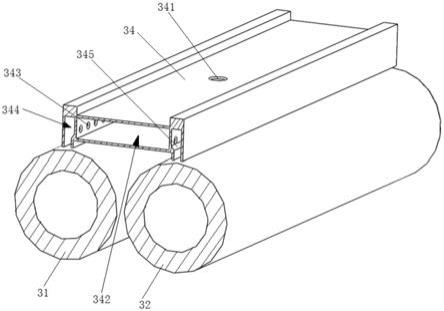
50.图28是本实用新型实施例4中倒垃圾机器人的结构示意图;
51.图29是本实用新型实施例4中竖直运动机构的结构示意图。
具体实施方式
52.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。在本实用新型的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。如果不冲突,本实用新型施例以及实施例中的各个特征可以相互结合,均在本实实用新型的保护范围之内。
53.实施例1
54.本实用新型实施例1公开了一种倒垃圾机器人,倒垃圾机器人包括抓取装置、移动装置和驱动装置,抓取装置用于抓取清洁机器人的集尘机构,移动装置与抓取装置连接,移动装置移动抓取装置及集尘机构至倒垃圾位置。驱动装置与移动装置连接,驱动装置在移动装置移动抓取装置及集尘机构至倒垃圾位置时,驱动集尘机构倾倒垃圾。移动装置包括水平运动机构及竖直运动机构,竖直运动机构驱动抓取装置在竖直方向上运动;水平运动机构驱动竖直运动机构在水平面上直线运动。
55.本实施例中抓取装置仅仅是抓取了清洁机器人的集尘机构后,移动装置移动抓取装置及集尘机构至倒垃圾位置,再后驱动装置驱动集尘机构倾倒垃圾;本实施例中实现了自动化倾倒集尘机构中的垃圾,因此本实施例中倒垃圾机器人减少了用户工作量,提高了用于满意度。同时集尘机构的重量是远远低于清洁机器人重量的,而本实施中仅需要抓取清洁机器人集尘机构便能实现垃圾倾倒,因此相较于现有技术来说也降低了倾倒清洁机器
人中垃圾的能耗。
56.实施例2
57.请参见图11和图12,本实用新型实施例2公开了一种倒垃圾机器人,本实施例中的倒垃圾机器人包括抓取装置2、移动装置1、驱动装置和第一控制器。倒垃圾机器人工作原理为:抓取装置2抓取清洁机器人4上的尘盒3(或尘袋)如图11所示;然后移动装置1移动抓取装置2、尘盒3至倒垃圾位置,再后驱动装置再驱动尘盒3倾倒垃圾如图12所示。在本实施例中。为便于理解倒垃圾机器人的结构及工作原理,现将移动装置1、抓取装置2、驱动装置、尘盒3分别进行描述如下。
58.尘盒3
59.如图1所示,本尘盒3包括尘盒本体35、上盖36和下盖37,尘盒本体35为上方及下方开口的框体结构,该上盖36固定安装在尘盒本体35上从而将尘盒本体35上方的开口密封;下盖37转动连接在尘盒本体35下部,当下盖37转动至与尘盒本体35下方开口贴合时,下盖37将尘盒本体35的下方开口密封。如图6和图7所示,在下盖37上还设有两个卡扣373,两个卡扣373位于下盖37的下盖37与尘盒本体35转动连接的相对侧;同时如图8所示,在尘盒本体35下部也设有与卡扣373相匹配的卡槽3510,当下盖37转动至与尘盒本体35下方开口贴合时,下盖37上的卡扣373扣入尘盒本体35上的卡槽3510内。
60.如图2所示,在上盖36的上表面上设有解锁按钮32、开盖按钮33和两个吸附铁片31(在其他实施例中吸附铁片也可以由磁铁代替),且在上盖36上还设有解锁机构,解锁按钮32用于驱动解锁机构工作,本实施例中解锁机构沿尘盒3的长度方向设置。如图3所示,该上盖36包括顶盖361、密封体362、过滤支架363和两个锁扣364,顶盖361、过滤支架363、密封体362从上至下依次设置。两个锁扣364安装在在顶盖361与过滤支架363之间,且两个锁扣364分别设于解锁按钮32的相对两侧,在解锁按钮32上设有两个第二楔形件321,在每个锁扣364靠近解锁按钮32的一端设有第一楔形件365,一个第二楔形件321与一个第一楔形件365接触,则通过按压解锁按钮32下降可通过第二楔形件321、第一楔形件365带动两个锁扣364相互靠近,从而使得锁扣364缩回上盖36内部,从而解锁尘盒3与清洁机器人4之间的连接。再如图4所示,在锁扣364内部还设有弹簧安装槽,在弹簧安装槽内安装有第一复位弹簧366,且在顶盖361下表面上还设有延伸至弹簧安装槽内的延伸件367,该第一复位弹簧366的一端与延伸件367接触,第一复位弹簧366的另一端与弹簧安装槽的内壁接触。则不再按压解锁按钮32按钮后,被压缩的第一复位弹簧366会对锁扣364施加向尘盒3外部运动的压力,从而使得锁扣364复位。再如图5所示在过滤支架363上安装有过滤件368。
61.如图6所示,尘盒本体35包括储尘件351及两个包覆件352,储尘件351内部设有储尘腔,两个包覆件352分别设于储尘件351的相对两侧。在储尘件351上还设有传动臂353,在传动臂353可在储尘件351上沿竖直方向往复运动,开盖按钮33的下端穿过上盖36后与传动臂353固定连接,则通过按压开盖按钮33可带动传动臂353下降。如图7所示,在传动臂353的下部还固定安装有开盖顶杆354,该开盖顶杆354的下端与下盖37的上表面接触,则按压开盖按钮33时可通过传动臂353、开盖顶杆354的下降从而顶开下盖37。
62.如图8所示,在每个包覆件352与储尘件351之间均设有一个连杆机构,该连杆机构包括第一连杆355和第二连杆356,第一连杆355的一端转动连接在储尘件351上,第一连杆355的另一端与第二连杆356的一端转动连接,第二连杆356的另一端与下盖37转动连接;在
每个第一连杆355上设有一个驱动孔。传动臂353两端分别固定连接有一个驱动杆357,每个驱动杆357穿过储尘件351至储尘件351与包覆件352之间,且驱动杆357穿过一个第一连杆355上的驱动孔。则按压开盖按钮33时可通过传动臂353、驱动杆357、第一连杆355、第二连杆356带动下盖37沿下盖37与尘盒本体35的转动连接处逆时针转动,如图8所示,此时尘盒3中的垃圾从尘盒本体35下方开口落入垃圾桶中。如图10所示,在开盖顶杆354上还套设有第二复位弹簧331,该复位弹簧331位于储尘件351与传动臂353之间,且复位弹簧331的上端与传动臂353接触,复位弹簧331的下端与储尘件351接触。当开盖按钮33被按压时,第二复位弹簧331被压缩;当开盖按钮33不被按压时,第二复位弹簧331伸长,使得开盖按钮33向上运动,则开盖按钮33通过传动臂353、驱动杆357、第一连杆355、如图8中所示第二连杆356带动下盖37沿下盖37与尘盒本体35的转动连接处顺时针转动,使得下盖37闭合。如图9所示,在传动臂353上还设有压板358,该压板358位于储尘件351的储尘腔内部,在按压开盖按钮33时,开盖按钮33可通过传动臂353带动开压板358向下运动,压板358可压住储尘腔内的垃圾向下运动,从而加快垃圾的排出。
63.抓取装置2
64.如图13和图16所示,该抓取装置2包括抓取壳体、抓取机构及距离检测传感器24,抓取壳体包括抓取下盖212和安装在抓取下盖212上的抓取上盖,该抓取机构设置在抓取壳体上。抓取机构为磁吸抓取机构,在其他实施例还包括通过抓取尘盒的两侧进行抓取等抓取方式,例如将抓取机构设置为机械爪。本实施例中抓取机构包括两个电磁铁221,两个电磁铁221设置在抓取下盖212上。如图16所示,抓取下盖212的下表面相对各电磁铁221设有一个容纳孔,一个电磁铁221安装在一个容纳孔内,且电磁铁221的磁吸面与抓取下盖212的下表面平行。如图17所示,在尘盒3的上表面上相对各电磁铁221设有一个吸附铁片31,则抓取装置2上的电磁铁221通过吸附尘盒3上的吸附铁片31,从而抓取住尘盒3。距离检测传感器24安装在抓取下盖212内,且距离检测机构的距离检测探头241穿过抓取下盖212的下表面,如图16所示,距离检测探头241与抓取下盖212的下表面平行。
65.驱动装置
66.如图13、图14和图15所示,驱动装置包括第九驱动电机235、第一齿轮236、第一齿条233、第二齿条234、第一顶杆231、第二顶杆232、第一光电传感器2315、第二光电传感器2316和第三光电传感器2317。在抓取下盖212上设有第七导轨213和第八导轨214,第七导轨213和第八导轨214的导向方向竖直向下设置。第一齿条233上设有第一滑块237,第一齿条233的第一滑块237滑动连接在第七导轨213内,第二齿条234上设有第二滑块238,第二齿条234的第二滑块238滑动连接在第八导轨214内。第九驱动电机235固定安装在抓取下盖212上,第一齿轮236固定安装在第九驱动电机235的输出轴上,其中第一齿条233和第二齿条234分别设在第一齿轮236的相对两侧,且第一齿条233的齿条面与第二齿条234的齿条面相向设置;第一齿条233、第二齿条234分别与第一齿轮236啮合。则通过第九驱动电机235输出轴的正反转动,可带动第一齿条233、第二齿条234沿竖直方向升降;由于第一齿条233和第二齿条234分别与第一齿轮236的两侧啮合,则第一齿条233上升时,第二齿条234下降,而第一齿条233下降时,第二齿条234上升。
67.如图15所示,第一顶杆231设置在第一滑块237的下端,在第一顶杆231下端设有第一缓冲弹簧,则当第一齿条233向下运动时可带动第一顶杆231向下运动,第一缓冲弹簧可
对第一顶杆231进行缓冲,从而防止第一顶杆231运动过量造成其他零件损坏。如图15所示,第二顶杆232设在在第二滑块的下端,在第二顶杆232下端设有第二缓冲弹簧,则当第二齿条234向下运动时可带动第二顶杆232向下运动,第二缓冲弹簧可对第二顶杆232进行缓冲,从而防止第二顶杆232运动过量造成其他零件损坏。如图16所示,在抓取下盖212的下表面上分别设有供第一顶杆231和第二顶杆232穿过的通孔。因此通过第九驱动电机235输出轴的正反转动,可带动第一顶杆231、第二顶杆232沿竖直方向穿过通孔。
68.如图15所示,在第一齿条233上还设有第一检测件2313,其中第一检测件2313位于第一齿条233的下端位置;在第二齿条234上还设有第二检测件2314,其中第二检测件2314位于第二齿条234的中部位置。在抓取下盖内还安装有检测支架,第一光电传感器2315、第二光电传感器2316和第三光电传感器2317均安装在检测支架上。第一光电传感器2315沿竖直方向设置于第二光电传感器2316的上方,第一光电传感器2315和第二光电传感器2316用于检测第一检测件2313,第三光电传感器2317用于检测第二检测件2314。当第三光电传感器2317检测到第二检测件2314时,此时代表第一齿条233和第二齿条234位于初始位置,第一顶杆231、第二顶杆232的下端面与抓取下盖的下表面平齐;当第一光电传感器2315检测到第一检测件2313时,此时第一齿条233位于最高位置,第二齿条234位于最低位置,第一顶杆231缩回至抓取下盖内部,第二顶杆232突出与抓取下盖的下表面;当第二光电传感器2316检测到第一检测件2313时,此时第一齿条233位于最低位置,第二齿条234位于最高位置,第一顶杆231突出与抓取下盖的下表面,第二顶杆232缩回至抓取下盖内部。
69.第一控制器的第一输入端与距离检测传感器24的输出端连接,第一控制器的第二输入端与第一光电传感器2315的输出端连接,第一控制器的第三输入端与第二光电传感器2316的输出端连接,第一控制器的第四输入端与第三光电传感器2317的输出端连接,第一控制器的第一输出端与电磁铁221的输入端连接,第一控制器的第二输出端与第九驱动电机235的输入端连接。
70.移动装置1
71.如图18所示,该移动装置1包括基座11、支撑臂13及设置在基座11上方的旋转升降机构12,在基座11上还设有用于为清洁机器人4进行充电的充电机构,充电机构为设置在基座11上的两个充电触点111,当清洁机器人4运动至倒垃圾机器人处时,清洁机器人4与两个充电触点111接触从而进行充电。支撑臂13固定安装在基座11上方,且支撑臂13呈倒l状半包围旋转升降机构12。如图19所示,该旋转升降机构12包括旋转壳体121、上旋转轴122和下旋转轴123,上旋转轴122固定安装在旋转壳体121的上端,下旋转轴123固定安装在旋转壳体121的下端;其中上旋转轴122转动连接在支撑臂13上,下旋转轴123转动连接在基座11上,从而使得旋转壳体121可在支撑臂13与基座11之间旋转。由支撑臂13在旋转壳体121的上端的上旋转轴122提供了转动支撑,从而提高了旋转壳体121转动的平稳性。
72.如图20所示在基座11上内设有水平运动机构,该水平运动机构包括第十驱动电机125、第二齿轮126和第三齿轮127,该第十驱动电机125的输出轴竖直向下设置,且在第十驱动电机125的输出轴上安装有第二齿轮126,该第二齿轮126与第三齿轮127之间通过若干齿轮传动,第三齿轮127与下旋转轴123同轴固定连接。因此通过第十驱动电机125输出轴的转动可带动下旋转轴123、旋转壳体121转动(又由于后述旋转壳体121内设有竖直运动机构,即水平运动机构驱动竖直运动机构在水平方向上转动)。如图21所示,在支撑臂13的上端安
装有第四光电传感器132和第五光电传感器133,上旋转轴122穿入支撑臂13内部并连接有第三检测件129和第八检测件128,该第四光电传感器132用于检测第八检测件128,第五光电传感器133用于检测第三检测件129,其中第三检测件129的初始位置位于被第五光电传感器133检测的位置,当旋转轴122转动90
°
后第三检测件129和第八检测件128随着旋转轴122转动90
°
,此时第五光电传感器133无法检测到第三检测件129,而第四光电传感器132能够检测到第八检测件128。
73.如图22所示,在旋转壳体121内还设有竖直运动机构、第六光电传感器1215和第七光电传感器1216,其中竖直运动机构包括第七齿条1211、升降平台1210、第六导轨1217、第三驱动电机1212和第四齿轮1213。第七齿条1211和第六导轨1217均沿竖直方向设置,且第七齿条1211与第六导轨1217均固定设置在旋转壳体121内。上述升降平台1210在第六导轨上沿竖直方向滑动,该第三驱动电机1212固定安装在升降平台1210上,且第三驱动电机1212的输出轴与第四齿轮1213同轴固定连接;第四齿轮1213与第七齿条1211啮合,则通过第三驱动电机1212的输出轴转动可带动第四齿轮1213转动,通过第四齿轮1213与第七齿条1229啮合从而驱动升降平台1210升降(又由于后述升降平台1210与抓取装置连接,即竖直运动机构驱动抓取装置在竖直方向上运动)。再如图22所示,在旋转壳体121内的上部安装有第六光电传感器1215,在旋转壳体121内的下部安装有第七光电传感器1216,同时在升降平台1210上还设有第四检测件1218和第九检测件1231,该第六光电传感器1215用于检测第九检测件1231,第七光电传感器1216用于检测第四检测件1218。当升降平台1210向上运动至第六光电传感器1215检测到第九检测件1231时,升降平台1210运动至最高位置;当升降平台1210向下运动至第七光电传感器1216检测到第四检测件1218,升降平台1210运动至低高位置。
74.如图23所示,在升降平台1210上设有伸缩机构、第八光电传感器1222和第九光电传感器1223,该伸缩机构包括第四驱动电机1219、第二导向杆1220和第三齿条1221,第二导向杆1220和第三齿条1221平行设置,且第二导向杆1220与水平方向平行。在升降平台1210上设有供第二导向杆1220穿过的第二导向孔,在升降平台1210上设有供第三齿条1221穿过的第三导向孔。第四驱动电机1219固定安装在升降平台1210上,且第四驱动电机1219的输出轴上同轴固定连接有第六齿轮1224,该第六齿轮1224与第三齿条1221啮合。同时第二导向杆1220、第三齿条1221均与抓取装置2固定连接,则第四驱动电机1219的输出轴转动后可通过第六齿轮1224、第三齿条1221带动抓取装置2沿第二导向杆1220的导向方向运动,从而实现抓取装置远离或靠近竖直运动机构。第八光电传感器1222和第九光电传感器1223固定安装在升降平台1210上,且第八光电传感器1222及第九光电传感器1223沿第三齿条1221的长度方向依次设置,在第三齿条1221的一端还设有第五检测件1226,该第八光电传感器1222及第九光电传感器1223用于检测第五检测件1226。如图23所示,当第三齿条1221向左运动至第八光电传感器1222检测到第五检测件1226时,抓取装置2运动至最靠近升降平台1210的位置;当第三齿条1221向右运动至第九光电传感器1223检测到第五检测件1226时,抓取装置2运动至最远离升降平台1210的位置。
75.如图19所示,在旋转壳体121上还相对第二导向杆1220设有第一移动槽1227,在旋转壳体121上还相对第三齿条1221设有第二移动槽,该第一移动槽和第二移动槽均沿竖直方向开设,第二导向杆1220穿过第一移动槽与抓取装置2连接,第三齿条1221穿过第二移动
槽与抓取装置2连接。
76.第一控制器的第五输入端与第四光电传感器132的输出端连接,第一控制器的第六输入端与第五光电传感器133的输出端连接,第一控制器的第七输入端与第六光电传感器1215的输出端连接,第一控制器的第八输入端与第七光电传感器1216的输出端连接,第一控制器的第九输入端与第八光电传感器1222的输出端连接,第一控制器的第十输入端与第九光电传感器1223的输出端连接。第一控制器的第三输出端与第十驱动电机125的输入端连接,第一控制器的第四输出端与第三驱动电机1212的输入端连接,第一控制器的第五输出端与第四驱动电机1219的输入端连接。
77.则本实施例中倒垃圾机器人的具体工作步骤如下:
78.s1、清洁机器人4完成扫地工作后清洁机器人4搜寻并找到倒垃圾机器人的位置;
79.s2、清洁机器人4运动至倒垃圾机器人位置处,并校准清洁机器人4是否位于设定位置;
80.s3、倒垃圾机器人对清洁机器人4进行充电;
81.s4、抓取装置2的初始位置如图12所示(如图12中未示出尘盒3的状态下所示);第一控制器控制第十驱动电机125的输出轴逆时针方向转动,第十驱动电机125的输出轴通过第二齿轮126带动第三齿轮127及下旋转轴123顺时针转动,从而带动旋转壳体121顺时针转动;
82.s5、当第四光电传感器132检测到第八检测件128时,旋转壳体121顺时针转动90
°
,此时第一控制器控制第十驱动电机125停止运动;同时当第四光电传感器132检测到第八检测件128时,第一控制器控制第四驱动电机1219的输出轴顺时针方向转动,第四驱动电机1219的输出轴通过第六齿轮1224带动第三齿条1221向右运动,从而使与第三齿条1221连接抓取装置2远离旋转壳体121运动;
83.s6、当第九光电传感器1223检测到第五检测件1226时,抓取装置2运动至尘盒3上方且抓取装置2位于尘盒3在竖直方向的上方,此时第一控制器控制第四驱动电机1219停止运动;当第九光电传感器1223检测到第五检测件1226时,第一控制器控制第三驱动电机1212的输出轴顺时针方向转动,第三驱动电机1212的输出轴通过第四齿轮1213与第七齿条1211啮合从而带动升降平台1210、抓取装置2向下运动;
84.s7、当第七光电传感器1216检测到第四检测件1218时,升降平台1210、抓取装置2运动至最低位置如图11所示,此时第一控制器控制第三驱动电机1212停止运动;同时当第七光电传感器1216检测到第四检测件1218时,第一控制器控制第九驱动电机235输出轴顺时针方向转动,第九驱动电机235的输出轴通过第一齿轮236、第二齿条234驱动位于初始位置的第二顶杆232下降,第九驱动电机235的输出轴通过第一齿轮236、第一齿条233驱动位于初始位置的第一顶杆231上升;
85.s8、当第一光电传感器2315检测到第一检测件2313时,第一顶杆231运动至最高位置,第二顶杆232运动至最低位置,此时第一控制器控制第九驱动电机235停止运动,第二顶杆232下降后压住尘盒3的解锁按钮32使得尘盒3不再与清洁机器人4的连接;同时,当第一光电传感器2315检测到第一检测件2313时,第一控制器控制电磁铁221产生吸力,从而将尘盒3磁性吸附在抓取装置2上;
86.s9、第一控制器控制第三驱动电机1212的输出轴逆时针方向转动,第三驱动电机
1212的输出轴通过第四齿轮1213与第七齿条1211啮合从而带动升降平台1210、抓取装置2、尘盒3向上运动;
87.s10、当第六光电传感器1215检测到第九检测件1231时,升降平台1210、抓取装置2、尘盒3运动至最高位置,此时第一控制器控制第三驱动电机1212停止运动;同时当第六光电传感器1215检测到第九检测件1231时,第一控制器控制第四驱动电机1219的输出轴逆时针方向转动,如图22所示,第四驱动电机1219的输出轴通过第六齿轮1224带动第三齿条1221向左运动,从而使与第三齿条1221连接抓取装置2靠近旋转壳体121运动;
88.s11、当第八光电传感器1222检测到第五检测件1226时,抓取装置2、尘盒3运动至靠近旋转壳体121的位置,此时第一控制器控制第四驱动电机1219停止运动;同时当第八光电传感器1222检测到第五检测件1226时,第一控制器控制第十驱动电机125的输出轴顺时针方向转动,第十驱动电机125的输出轴通过第二齿轮126带动第三齿轮127及下旋转轴123逆时针转动,从而带动旋转壳体121逆时针转动;
89.s12、当第五光电传感器133检测到第三检测件129时,旋转壳体121逆时针转动90
°
,此时第一控制器控制第十驱动电机125停止运动;同时当第五光电传感器133检测到第三检测件129时,如图23所示,第一控制器控制第四驱动电机1219的输出轴顺时针方向转动,第四驱动电机1219的输出轴通过第六齿轮1224带动第三齿条1221向右运动,从而使与第三齿条1221连接抓取装置2远离旋转壳体121运动;
90.s13、当第九光电传感器1223检测到第五检测件1226时,抓取装置2、尘盒3运动至垃圾桶5上方,此时第一控制器控制第四驱动电机1219停止运动;当第九光电传感器1223检测到第五检测件1226时,第一控制器控制第九驱动电机235输出轴逆时针方向转动,电机的输出轴通过第一齿轮236、第二齿条234驱动位于最低位置的第二顶杆232上升,电机的输出轴通过齿轮、第一齿条233驱动位于最高位置的第一顶杆231下降。在本实施例中当抓取装置2及尘盒3运动至垃圾桶5(垃圾桶5、垃圾袋、垃圾箱等其他垃圾存放装置)上方时,抓取装置2及尘盒3即移动至倒垃圾位置。在其他实施例中可以在不设置垃圾桶,而是在地面上设置一个倒垃圾的区域,当抓取装置及尘盒运动至倒垃圾的区域上方时即移动至倒垃圾位置,然后驱动装置在驱动尘盒倾倒垃圾。
91.s14、当第二光电传感器2316检测到第一检测件2313时,第一顶杆231运动至最低位置,第二顶杆232运动至最高位置,此时第一控制器控制第九驱动电机235停止运动,第一顶杆231下降后压住尘盒3的开盖按钮33后可打开尘盒3的下盖进行倒料;为提高尘盒3的倒料效果,可控制第一顶杆231在初始位置与最低位置来回运动多次,从而多次驱动尘盒3的下盖开盖。
92.s15、尘盒3倒料后,第一控制器控制第九驱动电机235输出轴顺时针方向转动,电机的输出轴通过齿轮、第二齿条234驱动位于最高位置的第二顶杆232下降,电机的输出轴通过齿轮、第一齿条233驱动位于最低位置的第一顶杆231上升;
93.s16、当第三光电传感器2317检测到第二检测件2314时,第一顶杆231、第二顶杆232运动至初始位置,此时第一控制器控制第九驱动电机235停止运动;此时尘盒3的下盖关闭;同时当第三光电传感器2317检测到第二检测件2314时,第一控制器控制第四驱动电机1219的输出轴逆时针方向转动,第四驱动电机1219的输出轴通过第六齿轮1224带动第三齿条1221向左运动,从而使与第三齿条1221连接抓取装置2、尘盒3靠近旋转壳体121运动;
94.s17、当第八光电传感器1222检测到第五检测件1226时,抓取装置2、尘盒3运动至靠近旋转壳体121的位置,此时第一控制器控制第四驱动电机1219停止运动;同时当第八光电传感器1222检测到第五检测件1226时,第一控制器控制第十驱动电机125的输出轴逆时针方向转动,第十驱动电机125的输出轴通过第二齿轮126带动第三齿轮127及下旋转轴123顺时针转动,从而带动旋转壳体121顺时针转动;
95.s18、当第四光电传感器132检测到第八检测件128时,旋转壳体121顺时针转动90
°
,此时第一控制器控制第十驱动电机125停止运动;同时当第四光电传感器132检测到第八检测件128时,第一控制器控制第四驱动电机1219的输出轴顺时针方向转动,第四驱动电机1219的输出轴通过第六齿轮1224带动第三齿条1221向右运动,从而使与第三齿条1221连接抓取装置2、尘盒3远离旋转壳体121运动;
96.s19、当第九光电传感器1223检测到第五检测件1226时,抓取装置2、尘盒3运动至清洁机器人4的上方,且尘盒3位于清洁机器人4在竖直方向上的上方,此时第一控制器控制第四驱动电机1219停止运动;当第九光电传感器1223检测到第五检测件1226时,第一控制器控制第三驱动电机1212的输出轴顺时针方向转动,第三驱动电机1212的输出轴通过第四齿轮1213与第七齿条1211啮合,从而带动升降平台1210、抓取装置2、尘盒3向下运动;
97.s20、当第七光电传感器1216检测到第四检测件1218时,升降平台1210、抓取装置2、尘盒3运动至最低位置,此时尘盒3被安装在清洁机器人4内,同时第一控制器控制第三驱动电机1212停止运动;同时当第七光电传感器1216检测到第四检测件1218时,第一控制器控制电磁铁221停止工作;
98.s21、在第三驱动电机1212停止运动的预设时间之后,本实施例中预设时间可以为1秒,第一控制器控制第三驱动电机1212的输出轴逆时针方向转动,第三驱动电机1212的输出轴通过第四齿轮1213与第七齿条1211啮合,从而带动升降平台1210、抓取装置2向上运动;
99.s22、当第六光电传感器1215检测到第九检测件1231时,升降平台1210、抓取装置2运动至最高位置,此时第一控制器控制第三驱动电机1212停止运动;同时当第六光电传感器1215检测到第九检测件1231时,第一控制器控制第四驱动电机1219的输出轴逆时针方向转动,第四驱动电机1219的输出轴通过第六齿轮1224带动第三齿条1221向左运动,从而使与第三齿条1221连接抓取装置2靠近旋转壳体121运动;
100.s23、当第八光电传感器1222检测到第五检测件1226时,抓取装置2运动至靠近旋转壳体121的位置,此时第一控制器控制第四驱动电机1219停止运动;同时当第八光电传感器1222检测到第五检测件1226时,第一控制器控制第十驱动电机125的输出轴顺时针方向转动,第十驱动电机125的输出轴通过第二齿轮126带动第三齿轮127及下旋转轴123逆时针转动,从而带动旋转壳体121逆时针转动;
101.s24、当第五光电传感器133检测到第三检测件129时,旋转壳体121逆时针转动90
°
,此时抓取装置2回到初始位置,当第五光电传感器133检测到第三检测件129时第一控制器控制第十驱动电机125停止运动。
102.在步骤s9至步骤s19的过程中,距离检测探头241实时检测尘盒3距离抓取装置2的距离,并将距离测量数值反馈至第一控制器,第一控制器根据测量数值判断抓取装置2是否抓取住尘盒3,或者第一控制器根据测量数值判断尘盒3是否掉落。
103.当然在本实施例中倒垃圾机器人的抓取装置也可抓取一个新的一次性尘盒安装在清洁机器人上。
104.实施例3
105.如图24所示,本实施例中的倒垃圾机器人包括移动装置1、抓取装置2、外壳、驱动装置和第二控制器。为便于理解倒垃圾机器人的结构及工作原理,现将移动装置1、抓取装置2、驱动装置、尘盒3和外壳分别进行描述,如下:
106.本尘盒3包括尘盒本体35、上盖36和下盖37,尘盒本体35为上方及下方开口的框体结构,该上盖36固定安装在尘盒本体35上从而将尘盒本体35上方的开口密封;下盖37转动连接在尘盒本体35下部,当下盖37转动至与尘盒本体35下方开口贴合时,下盖37将尘盒本体35的下方开口密封。在下盖37上还设有两个第一磁铁,两个第一磁铁位于下盖37上的下盖37与尘盒本体35转动连接的另一侧,同时在尘盒本体35下部也设有与第一磁铁相吸引的第二磁铁,当下盖37转动至与尘盒本体35下方开口贴合时,下盖37上的第一磁铁与尘盒本体35上的第二磁铁吸附,从而使得下盖37密封住尘盒本体35的下方开口。
107.在上盖36的上表面上设有解锁按钮32、两个开盖按钮33和两个吸附铁片31,且在上盖36上还设有解锁机构,解锁按钮32用于驱动解锁机构工作。本实施例中解锁机构沿尘盒3的宽度方向设置。该上盖36包括顶盖361、密封体362、过滤支架363和两个锁扣364,顶盖361、过滤支架363、密封体362从上至下依次设置。两个锁扣364安装在在顶盖361与过滤支架363之间,且两个分别设于解锁按钮32的相对两侧,在解锁按钮32上设有两个第二楔形件321,在每个锁扣364靠近解锁按钮32的一端设有第一楔形件365,一个第二楔形件321与一个第一楔形件365接触,则通过按压解锁按钮32下降可通过第二楔形件321、第一楔形件365带动两个锁扣364相互靠近,从而使得锁扣364缩回上盖36内部,从而解锁尘盒3与清洁机器人4之间的连接。在锁扣364内部还设有弹簧安装槽,在弹簧安装槽内安装有第一复位弹簧366,且在顶盖361下表面上还设有延伸至弹簧安装槽内的延伸件367,该第一复位弹簧366的一端与延伸件367接触,第一复位弹簧366的另一端与弹簧安装槽的内壁接触。则当不再按压解锁按钮32按钮时,被压缩的第一复位弹簧366会对锁扣364施加向尘盒3外部运动的压力,从而使得锁扣364复位。在过滤支架363上安装有过滤件368。
108.尘盒本体35内部设有储尘腔,每个开盖按钮33的下端穿过上盖36后连接有一个开盖顶杆354,该开盖顶杆354的下端与下盖37的上表面上的接触凸起接触,则按压开盖按钮33时可通过开盖顶杆354的下降从而顶开下盖37。下盖37沿下盖37与尘盒本体35的转动连接处转动,此时尘盒3中的垃圾从尘盒本体35下方开口落入垃圾桶中。
109.尘盒倾倒垃圾完毕后,移动尘盒3使得尘盒3的下盖与垃圾桶开口处的边缘接触,垃圾桶开口处的边缘抵住尘盒3的下盖旋转,从而使得尘盒3的下盖闭合。
110.抓取装置2
111.抓取装置2包括抓手固定板、抓取机构及距离检测传感器24,抓取机构为磁吸抓取机构,在其他实施例还包括通过抓取尘盒的两侧进行抓取等抓取方式。抓取机构包括两个电磁铁221,两个电磁铁221设置在抓手固定板上。抓手固定板的下表面相对各电磁铁221设有一个容纳孔,一个电磁铁221安装在一个容纳孔内,且电磁铁221的磁吸面与抓手固定板的下表面平行。在抓手固定板上相对各电磁铁221设有一个电磁铁安装座222,一个电磁铁221通过一个电磁铁安装座222安装在抓手固定板的上表面上。在尘盒3的上表面上相对各
电磁铁221设有一个吸附铁片31,则抓取装置2上的电磁铁221通过吸附尘盒3上的吸附铁片31,从而抓取住尘盒3。距离检测传感器24安装在抓手固定板上,且距离检测机构的距离检测探头穿过抓手固定板的下表面,距离检测探头与抓手固定板的下表面平行。
112.驱动装置
113.如图25,驱动装置包括驱动凸轮2319、舵机2320、舵机安装座、第一驱动连接杆2328、第二驱动连接杆2322、第三顶杆2323、第三顶杆安装座、第四顶杆2324和第四顶杆安装座2325。舵机安装座、第三顶杆安装座和第四顶杆安装座2325均固定安装在抓手固定板的上表面。舵机2320安装在舵机安装座上,舵机2320的输出转轴竖直向下穿过舵机安装座,并在舵机2320的输出轴上固定安装有驱动凸轮2319。第四顶杆2324上端穿过一个第四顶杆安装座2325,且第四顶杆2324可在第四顶杆安装座2325上往复升降。第四顶杆2324与第二驱动连接杆2322连接,则通过第二驱动连接杆2322上下升降可带动第四顶杆2324升降。第三顶杆2323上端穿过第三顶杆安装座,且第三顶杆2323可在第三顶杆安装座上往复升降。第三顶杆2323与第一驱动连接杆2328连接,则通过第一驱动连接杆2328上下升降可带动第三顶杆2323升降。
114.再如图26所示,在驱动凸轮2319的圆周面上设有倾斜的凹槽,第一驱动连接杆2328和第二驱动连接杆2322一端分别与驱动凸轮2319上的凹槽滑动连接,第一驱动连接杆2328和第二驱动连接杆2322一端所在的凹槽倾斜方向相反;则通过驱动驱动凸轮2319转动可带动第一驱动连接杆2328或第二驱动连接杆2322升降,从而带动第三顶杆2323或第四顶杆2324升降。其中当驱动凸轮2319带动第一驱动连接杆2328上升时,驱动凸轮2319带动第二驱动连接杆2322下降,当驱动凸轮2319带动第一驱动连接杆2328下降时,驱动凸轮2319带动第二驱动连接杆2322上升。
115.移动装置1
116.如图24和图27所示,移动装置1包括基座、支架14、水平运动机构和竖直运动机构,在基座上还设有用于为清洁机器人4进行充电的充电机构,充电机构为设置在基座上的两个充电触点,当清洁机器人4运动至倒垃圾机器人处时,清洁机器人4与两个充电触点接触从而进行充电。上述支架14固定安装在基座上方,如图27所示,该支架14包括第一支撑件141和第二支撑件142,该第一支撑件141和第二支撑件142沿竖直方向固定安装在基座上。
117.如图27所示,上述水平运动机构包括第一驱动电机151、第一带轮152、第二带轮154、第一皮带153、第一导轨143、第二导轨144、第十光电传感器和第十一光电传感器,第一导轨143、第二导轨144固定连接在第一支撑件141与第二支撑件142之间,且第一导轨143、第二导轨144均与第一支撑件141相互垂直,其中第一导轨143在第二导轨144的上方。该第一驱动电机151固定安装在第二支撑件142上,且第一驱动电机151的输出轴竖直向下设置连接有第一带轮152,上述第二带轮154转动安装在第一支撑件141上,其中第一带轮152及第二带轮154通过第一皮带153连接。第十光电传感器固定安装在第一支撑件141上,第十一光电传感器固定安装在第二支撑件142上,且第十光电传感器和第十一光电传感器均用于检测后述的第六检测件。
118.如图27所示上述竖直运动机构包括第一滑架、第二驱动电机162、第三带轮163、第四带轮165、第二皮带164、连接件166、第三导轨167、第六检测件、第十二光电传感器和第十三光电传感器,上述第一滑架分别与第一导轨143、第二导轨144滑动连接(则竖直运动机构
在第一导轨和第二导轨上运动),且第一滑架还固定连接在第一皮带153上,则通过第一驱动电机151输出轴的转动可带动第一滑架在第一导轨143、第二导轨144上滑动(水平运动机构驱动竖直运动机构在水平方向上直线运动)。上述第二驱动电机162和第三导轨固定安装在第一滑架上,第三导轨的导向方向与竖直方向平行,上述连接件166滑动连接在第三导轨上。第二驱动电机162的输出轴同轴安装有第三带轮163,第四带轮165转动安装在第一滑架上,其中第四带轮165位于第三带轮163竖直方向的下方,第三带轮163及第四带轮165通过第二皮带164连接。上述连接件166固定连接在第二皮带164上,且连接件166与抓取装置2的抓手固定板固定连接。则通过第二驱动电机162输出轴的转动可带动连接件166、抓取装置2在第三导轨上滑动(即竖直运动机构驱动抓取装置在竖直方向上运动)。上述第六检测件固定设置在第一滑架上。
119.上述第十二光电传感器和第十三光电传感器均固定安装在第一滑架上,且第十二光电传感器位于第十三光电传感器的上方,在该连接件166上还设有第七检测件,该第十二光电传感器和第十三光电传感器用于检测第七检测件。
120.上述第二控制器的第一输入端与第十光电传感器的输出端连接,第二控制器的第二输入端与第十一光电传感器的输出端连接,第二控制器的第三输入端与第十二光电传感器的输出端连接,第二控制器的第四输入端与第十三光电传感器的输出端连接。第二控制器的第一输出端与舵机2320的输入端连接,第二控制器的第二输出端与第一驱动电机151的输入端连接,第二控制器的第三输出端与第二驱动电机162的输入端连接。
121.外壳
122.外壳设置在基座的上部,且外壳将移动装置1中除基座以外的结构包覆在内,在外壳的侧面上设有供垃圾桶安装的安装孔,垃圾桶通过该安装孔安装在外壳上,也可从安装孔处将垃圾桶取出进行倾倒。在外壳的顶部还设有垃圾口,该垃圾口位于垃圾桶的正上方,且在垃圾口处设有转动的盖板可将垃圾口密封。
123.则本实施例中倒垃圾机器人的具体工作原理如下:
124.s1、清洁机器人4完成扫地工作后清洁机器人4搜寻并找到倒垃圾机器人的位置;
125.s2、清洁机器人4运动至倒垃圾机器人位置处,并校准清洁机器人4是否位于设定位置;
126.s3、倒垃圾机器人对清洁机器人4进行充电;
127.s4、抓取装置2的初始位置位于清洁机器人4中尘盒的正上方,第二控制器控制第二驱动电机162的输出轴逆时针转动,第二驱动电机的输出轴通过第二皮带164带动连接件166、抓取装置2向下运动;
128.s5、当第十三光电传感器检测到第七检测件时,连接件166、抓取装置2运动至最低位置,此时第二控制器控制第二驱动电机162停止运动;同时当第十三光电传感器检测到第七检测件时,第二控制器控制舵机旋转90
°
;
129.s6、舵机旋转90
°
带动驱动凸轮2319旋转90
°
后,此时第三顶杆2323运动至最低位置,而第四顶杆2324运动至最高位置,第三顶杆2323下降后压住尘盒3的解锁按钮32使得尘盒3不再与清洁机器人4的连接;当舵机旋转90
°
后,第二控制器控制电磁铁221产生吸力,从而将尘盒3磁性吸附在抓取装置2上;
130.s7、然后第二控制器控制第二驱动电机162的输出轴顺时针转动,第二驱动电机的
输出轴通过第二皮带164带动连接件166、抓取装置2、尘盒3向上运动;
131.s8、当第十二光电传感器检测到第七检测件时,连接件166、抓取装置2及尘盒3运动至最高位置,此时第二控制器控制第二驱动电机162停止运动;同时当第十二光电传感器检测到第七检测件时,控制器控制第一驱动电机151的输出轴顺时针转动,第一驱动电机151的输出轴通过第一皮带153带动第一滑架、连接件166、抓取装置2及尘盒3向左运动;
132.s9、当第十光电传感器检测到第六检测件时,第一滑架带动连接件166、抓取装置2及尘盒3运动至垃圾桶5上方,此时第二控制器控制第一驱动电机151停止运动;同时当第十光电传感器检测到第六检测件时,第二控制器控制舵机旋转180
°
;
133.s10、舵机旋转180
°
带动驱动凸轮2319旋转180
°
后,此时第四顶杆2324运动至最低位置,而第三顶杆2323运动至最高位置,第四顶杆2324下降后压住尘盒3的开盖按钮33后可打开尘盒3的下盖进行倒料;
134.s11、尘盒3倒料后,第二控制器控制舵机旋转90
°
;
135.s12、舵机旋转90
°
带动驱动凸轮2319旋转90
°
后,此时第三顶杆2323及第四顶杆2324运动至初始位置;
136.s13、然后控制器控制第一驱动电机151的输出轴逆时针转动,第一驱动电机151的输出轴通过第一皮带153带动第一滑架、连接件166、抓取装置2及尘盒3向右运动;在尘盒3向右运动的过程中,尘盒3的下盖与垃圾桶开口处的边缘接触,垃圾桶开口处的边缘抵住尘盒3的下盖旋转,从而使得尘盒3的下盖闭合;
137.s14、当第十一光电传感器检测到第六检测件时,第一滑架带动连接件166、抓取装置2运动至左右方向的初始位置,此时第二控制器控制第一驱动电机151停止运动;同时当第十一光电传感器检测到第六检测件时,第二控制器控制第二驱动电机162的输出轴逆时针转动,第二驱动电机的输出轴通过第二皮带164带动连接件166、抓取装置2、尘盒3向下运动;
138.s15、当第十三光电传感器检测到第七检测件时,连接件166、抓取装置2、尘盒3运动至最低位置,第二控制器控制第二驱动电机停止工作,此时尘盒3被安装在清洁机器人4内;同时第二控制器控制控制电磁铁221停止工作;
139.s16、在第二驱动电机停止运动的预设时间之后,本实施例中预设时间可以为1秒,第二控制器控制第二驱动电机162的输出轴顺时针转动,第二驱动电机的输出轴通过第二皮带164带动连接件166、抓取装置2向上运动;
140.s17、当第十二光电传感器检测到第七检测件时,连接件166、抓取装置2运动至竖直方向的初始位置,第二控制器控制第二驱动电机162停止运动。
141.在上述步骤s7至步骤s15的过程中,距离检测探头实时检测尘盒3距离抓取装置2的距离,并将距离测量数值反馈至第二控制器,第二控制器根据测量数值判断抓取装置2是否抓取住尘盒3,或者第二控制器根据测量数值判断尘盒3是否掉落。
142.实施例4
143.如图28所示,本实施例中的倒垃圾机器人在实施例3中倒垃圾机器人的基础上进行改进,具体的本实施例的倒垃圾机器人除移动装置结构与是实施例3中不同之外,其他都相同。现将移动装置的结构进行具体描述:如图28所示,该移动装置1包括基座、支架14、水平运动机构和竖直运动机构,在基座上还设有用于为扫地机器人4进行充电的充电机构,充
电机构为设置在基座上的两个充电触点,当扫地机器人4运动至倒垃圾机器人处时,扫地机器人4与两个充电触点接触从而进行充电。上述支架14固定安装在基座上方,如图28所示,该支架14为长方体状。
144.上述水平运动机构包括第七驱动电机171、移动平台172、第四齿条173和两个第三导向杆174,两个第三导向杆174相平行固定安装在支架上,移动平台172滑动连接在两第三导向杆174上,且第七驱动电机171固定安装在移动平台172上,在第七驱动电机171的输出轴上固定安装有第七齿轮175,第七齿轮175与第四齿条173啮合,且第四齿条173固定安装在支架上,第四齿条173与第三导向杆174平行设置。则通过第七驱动电机171输出轴的转动可带动移动平台172在第三导向杆174上往复滑动。
145.如图29所示上述竖直运动机构包括第八驱动电机181、第五齿条182、第六齿条183、伸缩臂186、第八齿轮187和第九齿轮188,该第八驱动电机181、第五齿条182、第六齿条183均设置在移动平台172上,第五齿条182和第六齿条183与第三导向杆174平行设置,且在第五齿条182上还设有第三滑块184,在第六齿条183上设有第四滑块185,该第三滑块184和第四滑块185均滑动连接在移动平台172内部,第三滑块184和第四滑块185的运动方向与第三导向杆174平行。在第八驱动电机181的输出轴上同轴安装有第十齿轮189,该第十齿轮189分别与第五齿条182、第六齿条183啮合,且第五齿条182与第十齿轮189的上部啮合,第六齿条183与第十齿轮189的下部啮合,则通过第八驱动电机181输出轴的转动可带动第五齿条182、第六齿条183相向运动或相背离运动。
146.上述伸缩臂186上部的第一支杆1861与第五齿条182转动连接,伸缩臂186上部的第二支杆1862与第六齿条183转动连接,第一支杆1861的中部与第二支杆1862的中部转动连接。伸缩臂186下部的第三支杆1863转动连接在抓取装置上,且第三支杆1863与抓取装置转动连接的转轴上同轴连接有第八齿轮187。第一支杆1861与第三支杆1863之间通过第五支杆连接,其中第五支杆与第一支杆1861转动连接,第五支杆与第三支杆1863转动连接。伸缩臂186下部的第四支杆1864转动连接在抓取装置上,且第四支杆1864与抓取装置转动连接的转轴上同轴连接有第九齿轮188,该第八齿轮187与第九齿轮188啮合。第二支杆1862与第四支杆1864之间通过第六支杆连接,其中第六支杆与第二支杆1862转动连接,第五支杆与第四支杆1864转动连接;第六支杆的中部与第五支杆的中部转动连接。则通过上述第八驱动电机181输出轴的转动可通过第五齿条182、第六齿条183带动伸缩臂186伸缩,从而带动抓取装置2升降。
147.则本实施例中倒垃圾机器人的具体工作原理如下:
148.s1、扫地机器人4完成扫地工作后扫地机器人4搜寻并找到倒垃圾机器人的位置;
149.s2、扫地机器人4运动至倒垃圾机器人位置处,并校准扫地机器人4是否位于设定位置;
150.s3、倒垃圾机器人对扫地机器人4进行充电;
151.s4、抓取装置2的初始位置位于扫地机器人4中尘盒的正上方,第三控制器控制第八驱动电机181的输出轴逆时针转动,第八驱动电机的输出轴通过第十齿轮189带动第五齿条、第六齿条相互背离运动,从而带动伸缩臂伸长带动抓取装置2向下运动;
152.s5、当抓取装置2运动至最低位置,此时第三控制器控制第八驱动电机181停止运动,且第三控制器控制驱动装置驱动尘盒3不再与清洁机器人4的连接,并控制抓取装置2抓
取住尘盒3;
153.s6、抓取装置2抓取住尘盒3后,第三控制器控制第八驱动电机181的输出轴顺时针转动,第八驱动电机的输出轴通过第十齿轮189带动第五齿条、第六齿条相互背向运动,从而带动伸缩臂伸长带动抓取装置2、尘盒3向上运动;
154.s7、当抓取装置2运动至最高位置,此时第三控制器控制第八驱动电机181停止运动,且第三控制器控制第七驱动电机171的输出轴逆时针转动,第七驱动电机171的输出轴通过第七齿轮175、第四齿条173带动移动平台172向左运动;
155.s8、当移动平台172、抓取装置2及尘盒运动至最左侧时抓取装置2及尘盒3运动至垃圾桶5上方,此时第三控制器控制第七驱动电机171停止运动;然后第三控制器控制控制舵机旋转180
°
;
156.s9、舵机旋转180
°
带动驱动凸轮2319旋转180
°
后,此时两第四顶杆2324运动至最低位置,而第三顶杆2323运动至最高位置,第四顶杆2324下降后压住尘盒3的开盖按钮33后可打开尘盒3的下盖进行倒料。
157.s10、尘盒3倒料后,第二控制器控制舵机旋转90
°
;
158.s11、舵机旋转90
°
带动驱动凸轮2319旋转90
°
后,此时第三顶杆2323及第四顶杆2324运动至初始位置;
159.s12、然后第三控制器控制第七驱动电机171的输出轴顺时针转动,第七驱动电机171的输出轴通过第七齿轮175、第四齿条173带动移动平台172向右运动(在尘盒3向右运动的过程中,尘盒3的下盖与垃圾桶开口处的边缘接触,垃圾桶开口处的边缘抵住尘盒3的下盖旋转,从而使得尘盒3的下盖闭合。当然在本实施例中也可以采用实施例2中的尘盒3,即当尘盒3上的开盖按钮未被按压时,尘盒3的下盖自动闭合);
160.s13、当移动平台172、抓取装置2及尘盒运动至最右侧时,第三控制器控制第七驱动电机171停止运动;然后第三控制器控制第八驱动电机181的输出轴逆时针(图29中)转动,第八驱动电机的输出轴通过第十齿轮189带动第五齿条、第六齿条相互背离运动,从而带动伸缩臂伸长带动抓取装置2、尘盒3向下运动;
161.s14、当抓取装置2运动至最低位置,此时第三控制器控制第八驱动电机181停止运动,此时尘盒3被安装在扫地机器人4内;同时第二控制器控制控制电磁铁221停止工作;
162.s15、在第八驱动电机181停止运动的预设时间之后,本实施例中预设时间可以为1秒,第三控制器控制第八驱动电机181的输出轴顺时针转动,第八驱动电机的输出轴通过第十齿轮189带动第五齿条、第六齿条相互背向运动,从而带动伸缩臂伸长带动抓取装置2向上运动;
163.s16、当抓取装置2运动至最高位置时,抓取装置2运动至初始位置,第三控制器控制第八驱动电机181停止运动。
164.实施例5
165.本实用新型实施例5中的倒垃圾机器人在实施例2、实施例3或实施例4的基础上进行改进。具体本实施例中的倒垃圾机器人除抓取机构、尘盒的结构与是其他实施例中不同之外,其他都相同,本实施例中的抓取机构为负压吸附机构,负压吸附机构设置在抓取下盖212的下表面上。该负压吸附机构包括至少一个负压吸附件,该负压吸附件上设有负压吸附口,且负压吸附口通过负压管道连接有负压源(例如负压风机)。在本实施例中尘盒上顶盖
的上表面上未设置吸附铁片,则尘盒上顶盖的上表面被负压吸附口所吸附后,抓取装置抓取住尘盒。
166.实施例6
167.本实用新型实施例6公开了一种清洁系统,该清洁系统包括实施例1至实施例5中任意一种倒垃圾机器人,同时该清洁系统还可以包括清洁机器人和/或清洗机器人。清洁机器人与倒垃圾机器人配合使用的清洁系统,可实现自动清扫、自动倒垃圾功能;清洁机器人与清洗机器人配合使用,可实现自动清扫,自动洗拖布功能;清洁机器人与倒垃圾机器人、清洗机器人配合使用,可实现自动清扫、自动倒垃圾、自动清洗拖布的功能。具有自动洗拖布功能的清洗机器人为现有技术,故不再赘述。
168.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。