1.本发明属于禽类加工领域,涉及一种禽类胴体分割自动化生产线及其加工方法。
背景技术:
2.家禽产品因其脂肪含量低、不饱和脂肪酸浓度相对较高、蛋白质质量优良、必须氨基酸含量高而受到世界各地消费者的青睐,禽肉已成为人们餐桌上不可或缺的必需品。在中国,家禽消费量以每年5%-10%的速度持续增长,2020年我国禽肉产量达2361吨,同比上年增长5.5%。
3.如图1所示,禽类加工流程一般包括活禽上架、电麻宰杀、浸烫脱羽、去头去爪、切肛掏膛、清洗整理、排酸预冷、分割分块和分拣包装等加工工序。现有环节中,电麻宰杀到排酸预冷过程基本实现自动化,分割分块等仍以密集型人工作业为主。但分割作业强度大,容易造成肉品二次污染等问题的存在,使得无人化的自动作业成为发展方向。
4.在禽类肉品切割过程中,已有的一些固定的自动化解决方案能实现禽类肉品的简单分割分块,但这些方案的适应性有限,在剔骨和精细分割环节,由于禽类胴体个体形状各异、生物软体组织刚度不均、分割骨肉界面材料特性复杂等难点,导致产品损耗率较高。
5.引入机器人技术,提高自动化肉品切割系统的适应性是比较合理的方法。已有的研究,如自动化剔骨是利用视觉系统识别鸡的三处特征点,然后基于鸡胴体几何和骨架的映射关系进行缩放,明确骨架位姿,确定入刀点和剔骨路径,最后结合机器人操作和力控技术进行剔骨路径修正,完成自动剔骨过程。但机器人技术的引入同样带了问题,机器人很难适应肉类分割时的大变形,同时由于生物材料的变形能力,在切割过程中容易存在误差。zhou等人对鸡肉片切割机构的切割过程研究室,发现切割机构实际切割点与理想位置存在一定误差。为了提高机器人对肉类分割大变形的适应性以及矫正能力,又需要开发新的算法,这样会降低机器人系统完成禽类肉品分割的速度和可靠性,难以适应工厂大规模加工的需求。
6.在机器人直接用刀进行分割存在问题的情况下,一种撕扯分割的工艺过程被提出,这种撕扯分割方式避免了切割过程,降低了机器人运动控制算法的体量,能够有效提高机器人产线运行速度,增加可靠性,适应工厂大规模加工的要求。
7.但实际生产中应用这种撕扯分割工艺的机器人产线较少,一方面是因为缺少可用的机器人撕扯分割装置,另一方面也是因为占据市场大部分的中小企业直接将现有自动化产线替换成机器人产线的成本过高。
技术实现要素:
8.针对现有技术的以上缺陷或改进需求,为了克服现有禽类分割装置中的不足,本发明提供了一种禽类胴体分割自动化生产线及其加工方法,其易于与传统自动化产线结合,降低禽类肉制品工厂向全无人化过渡的成本。
9.为实现上述目的,按照本发明的一个方面,提供了一种禽类胴体分割自动化生产
线,包括第一流水线、第二流水线、机械臂、夹具转移机构、夹具装夹装置以及随行夹具,其中:
10.第一流水线上设有工位a和工位e;
11.第二流水线为环形,其上设有工位b、工位c和工位d,工位b和工位a位置对应,工位d和工位e位置对应,工位c和机械臂位置对应;
12.第一流水线和第二流水线上均设置有用于装夹和运送随行夹具的夹具装夹装置;
13.其中,当第一流水线上的夹具装夹装置携带随行夹具运行至工位a时,夹具转移机构将随行夹具转移至第二流水线的工位b上待命的夹具装夹装置,然后第一流水线上空载的夹具装夹装置运行至工位e待命;当第二流水线上的夹具装夹装置携带随行夹具运行至工位c时,机械臂从上游产线将禽类胴体转移至工位c上的随行夹具;当第二流水线上的夹具装夹装置携带随行夹具运行至工位d时,同一个或者另一个夹具转移机构将随行夹具转移至第一流水线的工位e上待命的夹具装夹装置,然后随行夹具随第一流水线向下游移动。
14.进一步地,机械臂包括末端执行器,末端执行器包括旋转驱动器和两个平行二指夹爪,旋转驱动器用于驱动平行二指夹爪旋转。
15.进一步地,旋转驱动器的输出轴与两个平行二指夹爪的转轴均通过齿轮副或同步带传动机构连接。
16.进一步地,末端执行器还包括锁紧机构和第一安装板,旋转驱动器、锁紧机构以及两个平行二指夹爪均安装在第一安装板上;锁紧机构包括伸缩构件和两个固定销,伸缩构件用于带动两个固定销伸缩;两个平行二指夹爪上均设有插槽,两个固定销各对应于一个插槽;当伸缩构件带动两个固定销伸长时,固定销插入插槽将两个平行二指夹爪锁定,当伸缩构件带动两个固定销后缩时,固定销离开插槽,两个平行二指夹爪解锁。
17.进一步地,夹具装夹装置包括基板、夹紧组件和调节组件,其中:
18.夹紧组件包括夹紧机构基板、四连杆机构和夹紧顶杆,其中,夹紧机构基板安装在基板上;一对四连杆机构相对于夹紧机构基板对称设置,四连杆机构包括依次连接的第一连杆、第二连杆和压紧连杆,第一连杆一端开设有长圆形孔,另一端与第二连杆铰接,且第一连杆与曲面基板末端铰接;压紧连杆一端与第二连杆铰接,另一端与基板铰接,且连接处设有扭簧,压紧连杆用于对随行夹具进行夹紧;夹紧顶杆同时穿过两侧第一连杆和曲面基板下端的长圆形孔;
19.调节组件用于调节夹紧顶杆的高度。
20.进一步地,夹具装夹装置还包括限位组件,限位组件包括限位板、安装板和限位顶杆,其中,限位板用于从侧边对随行夹具进行限位,其下有伸出的直杆,该直杆下端穿过安装板,安装板固定在基板上;直杆上套有弹簧,该弹簧上下两端分别顶在限位板和安装板上;限位顶杆固定在限位板上;
21.调节组件用于调节限位顶杆的高度。
22.进一步地,调节组件包括成对设置的定位挡板和夹紧挡板,定位挡板和夹紧挡板均为中间高、两边低的片状凸起结构;定位挡板和夹紧挡板成对地安装在第一流水线的工位a、工位e和第二流水线的工位b、工位d上;定位挡板的凸起一侧朝下,夹紧挡板的凸起一侧朝上;限位顶杆在第一流水线或第二流水线运行过程中,与定位挡板的下表面接触,夹紧顶杆在第一流水线或第二流水线运行过程中,与夹紧挡板的上表面接触。
23.为了实现上述目的,按照本发明的另一个方面,提供了一种禽类胴体分割自动化加工方法,采用如前任一项所述的一种禽类胴体分割自动化生产线实现,包括如下步骤:
24.步骤1:第一流水线上的夹具装夹装置携带随行夹具运行至工位a;
25.步骤2:夹具转移机构将随行夹具转移至第二流水线的工位b上待命的夹具装夹装置,然后第一流水线上空载的夹具装夹装置运行至工位e待命;
26.步骤3:第二流水线上的夹具装夹装置携带随行夹具运行至工位c,机械臂从上游产线将禽类胴体转移至工位c上的随行夹具;
27.步骤4:进行禽类胴体分割;
28.步骤5:第二流水线上的夹具装夹装置携带随行夹具转移分割后的禽类胴体至工位d;
29.步骤6:同一个或者另一个夹具转移机构将随行夹具转移至第一流水线的工位e上待命的夹具装夹装置,然后分割后的禽类胴体随第一流水线向下游移动。
30.进一步地,步骤4中直接由机械臂通过撕扯方式进行禽类胴体分割。
31.总体而言,本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
32.1、本发明采用可与传统产线有机结合的设计,能够通过机械臂和第一流水线实现上下游传统流水线的衔接,而将胴体分割工序通过夹具装夹装置和夹具转移机构转移至第二流水线上实施,并在胴体分割之后能够再通过夹具装夹装置和夹具转移机构转移至第一流水线上并继续向下游移动,顺利实现禽类胴体在传统产线与机器人产线之间的无缝衔接,而无需复杂的产线升级改造,大大降低了中小企业无人化过渡成本。
33.2、机械臂的末端执行器通过平行二指夹爪旋转,具有两种工作模式,可以实现取下并摆放禽类胴体和翅胸一体撕扯分割两种操作。
34.3、通过设置锁紧机构,保证平行二指夹爪在不同工作模式下的稳定性且不妨碍工作模式的切换。
35.4、夹具装夹装置通过夹紧组件和调节组件的配合,能够轻松实现随行夹具的自动夹紧。
36.5、夹具装夹装置通过限位组件和调节组件的配合,能够轻松实现随行夹具的自动限位。
37.6、利用定位挡板和夹紧挡板形成定点被动触发机制,相比于传统的主动触发式装置,不仅简化构造、节约能耗,而且定点触发精度和可靠性也能获得较好的保障,有利于高效率运转。
38.7、禽类胴体分割自动化加工方法通过双流水线的工位对应转移加工方式,大大提高了第一流水线和第二流水线的空间设计自由度,其中第一流水线下游可以任意角度对接传统流水线,机械臂则可以任意对接上游流水线,第二流水线只需要与第一流水线具有对应工位用于随行夹具转移即可。因此,本发明能够顺利实现禽类胴体在传统产线与机器人产线之间的无缝衔接,而无需复杂的产线升级改造,大大降低了中小企业无人化过渡成本。
附图说明
39.图1是禽类肉品加工生产流程图;
40.图2是机器人撕扯分割鸡胴体装置整体示意图;
41.图3是产线转移装置总体结构示意图;
42.图4是夹具装夹装置安装示意图;
43.图5是夹具装夹装置定位机构结构示意图;
44.图6是夹具装夹装置夹紧机构结构示意图;
45.图7是夹具装夹装置夹紧机构俯视角示意图。
46.图8是机器人末端执行器总体结构示意图;
47.图9是机器人末端执行器执行部分结构示意图;
48.图10是机器人末端执行器同步带机构结构示意图;
49.图11是机器人末端执行器锁紧机构结构示意图。
50.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
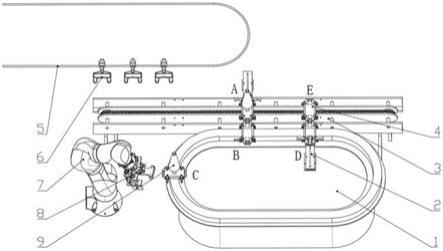
51.1-第二流水线,2-夹具转移机构,3-第一流水线,4-夹具装夹装置,5-空中运输链,6-鸡胴体挂钩,7-机械臂,8-末端执行器,9-随行夹具;
52.21-第一安装板,22-末端夹爪,23-第二安装板,24-夹爪气缸,25-直线气缸,26-气缸安装装置;
53.31-夹紧挡板,32-左内挡板,33-定位挡板,34-左外挡板;
54.41-限位顶杆,42-基板,43-限位板,44-左套筒,45-弹簧,46-右套筒,47-安装板,48-夹紧顶杆,49-右第一连杆,410-右第二连杆,411-右压紧连杆,412-左压紧连杆,413-左第二连杆,414-夹紧机构基板,415-左第一连杆,416-右第一扭簧,417-右第二扭簧,418-左第一扭簧,419-左第二扭簧;
55.81-第一安装板,82-第二安装板,83-机器人连接盘,84-第一支撑套筒,85-相机,86-相机安装板,87-旋转驱动器,88-夹爪驱动轴,89-驱动轴第一止推轴承,810-平行二指气缸,811-左夹爪,812-右夹爪,813-驱动轴第一轴承,814-夹爪安装盘,815-旋转驱动器连接件,816-主动轴,817-主动轴轴承,818-驱动轴第二止推轴承,819-驱动轴第二轴承,820-右从动轮,821-同步带,822-张紧轮轴,823-张紧轮,824-主动轮,825-左从动轮,826-固定销连接板,827-右滑动轴承,828-右固定销,829-笔形气缸,830-左固定销,831-左滑动轴承,832-笔形气缸连接块,833-笔形气缸安装板。
具体实施方式
56.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
57.下面,以鸡胴体撕扯分割为例对本发明进行详细说明。
58.本发明主要包括两个部分:用于机器人撕扯分割鸡胴体的末端执行器和用于随行夹具转移的夹具装夹装置。与传统产线连接后,通过夹具转移机构将随行夹具从传统禽类肉品分割产线上的夹具装夹装置转移到机器人处理平台的夹具装夹装置上,而后夹具装夹装置开始运动,实现锁紧,到机械臂工位时停止运动。机械臂驱动末端执行器将鸡胴体从空中运输链上取下,安装到随行夹具上,撕扯分割鸡翅胸一体,将分离的翅胸一体放到专用夹
具中,剩余鸡胴体与鸡胴体夹具一起被夹具转移机构送回传统产线,运输到下一加工环节。
59.所述用于机器人撕扯分割鸡胴体的末端执行器主要由两个二指夹爪,夹紧机构以及同步带驱动机构组成,整体由气动驱动。同步带驱动机构由旋转驱动器驱动,控制两指夹爪转换姿态,切换功能,实现抓取和撕扯分割两个动作。姿态转换后,通过夹紧机构对姿态进行锁定,避免因工作过程中受力导致两指夹爪姿态出现变化。
60.所述用于随行夹具转移的夹具装夹装置在整个处理过程中提供锁紧以及定位功能。为了避免引入过多动力源、增加控制难度,夹具装夹装置采用弹簧杆结构驱动,运动到特定位置后,杆被顶起,锁紧机构打开,方便鸡形夹具的转移,离开特定位置后,锁紧机构在扭簧的作用下回到锁紧状态,避免运动过程中随行夹具出现位移。夹具装夹装置的两侧设计有弹簧驱动的挡板,同锁紧机构类似,由弹簧杆驱动,当运动到特定位置之后,挡板升起,在随行夹具转移过程中提供定位功能,离开该位置之后,挡板在弹簧作用下收缩,避免影响到其他运动过程。
61.在对两部分进行更为细致的介绍之前,首先对机器人撕扯分割鸡胴体装置整体进行介绍,图2是机器人撕扯分割鸡胴体装置整体示意图。如图2所示,机器人撕扯分割鸡胴体装置整体可分为工厂原产线和机器人加工平台两部分。其中,工厂原产线由空中运输链5、鸡胴体挂钩6和第一流水线3(本实施例优选为产线输送链)组成;机器人加工平台主要由第二流水线1(本实施例优选为磁悬浮环形导轨),机械臂7以及末端执行器8组成。几个夹具装夹装置4和两个鸡胴体夹具转移机构2(本实施例优选为气缸)分别安装在工厂原产线的产线输送链3和机器人加工平台的磁悬浮环形导轨1上,随行夹具9的底盘上加工有凹槽,与夹具装夹装置4的锁紧部分相配合。在其他实施例中,也可以仅设置一个夹具转移机构2,例如一个机械手,由于夹具转移机构2的核心功能仅为工位之间的转移,因此具有较多常规实施方式,不再赘述。
62.图3是产线转移装置总体结构示意图,产线转移装置主要包括夹具转移装置2和夹具装夹装置4。产线输送链3将夹具装夹装置4和其上的随行夹具9送到固定位置,夹具装夹装置4松开,然后夹具转移机构2将随行夹具9推到磁悬浮环形导轨1上的夹具装夹装置4上,然后磁悬浮环形导轨1上的夹具装夹装置4将随行夹具9送到机械臂6工作工位,机械臂6从空中运输链5上取下安装到环形导轨上的夹具装夹装置4上的随行夹具9上。然后磁悬浮环形导轨1上的夹具装夹装置4逆时针运动,运动到特定位置,然后通过产线转移机构2将随行夹具9推回产线输送链3上的夹具装夹装置4上,夹具装夹装置4夹紧随行夹具9,通过产线输送链3将其送到下一工位。夹具转移机构2主要直线气缸25,气缸安装装置26,夹爪气缸24组成。夹爪气缸24末端安装有末端夹爪22,用来抓住随行夹具7,当夹爪气缸24的末端夹爪22夹紧随行夹具7后,夹爪气缸24通过螺栓安装到夹具转移机构安装板26,然后再通过螺栓将上述部分作为整体安装到直线气缸25上,再通过螺栓将直线气缸25安装到第一安装板21上,再将第一安装板21通过螺栓安装到磁悬浮环形导轨1。在产线输送链3上也安装有一套夹具转移机构,这里的夹具转移机构2通过第二安装板23安装到产线输送链3上。
63.图4是产线转移装置夹具装夹部分结构示意图,如图4所示,所述产线输送链3用于运送夹具装夹装置4及安装在夹具装夹装置4上的随行夹具9到不同工位。夹具装夹装置4的定位挡板33通过螺栓安装在产线输送链3的左外挡板34的内侧。夹具装夹装置4的夹紧挡板31通过螺栓安装在产线输送链3的左内挡板32的外侧。
64.图5是夹具装夹装置4的定位机构结构示意图。如图5所示,限位板43挡住随行夹具9的侧边,实现对随行夹具9的限位,提高拆卸安装过程中随行夹具9的位置精度。限位板43穿过基板42的预留孔,限制其自由度,只有上下的位移。限位板43的左右两侧有伸出的直杆,直杆上套有一个弹簧45。弹簧45的一端顶着限位板43,另一端顶着安装板47,在平时将限位板43顶起来。安装板47通过左套筒44和右套筒46与基板42保持一定距离,给弹簧45留下空间。螺栓穿过左套筒44和右套筒46将安装板47固定在基板42上。安装板47上有预留孔,限位板43的上的直杆穿过安装板47的预留孔,限制弹簧45的位置。定位机构的限位板43左右两侧的结构对称。限位板43上固连限位顶杆41,限位顶杆41在产线输送链3运行过程中,与定位挡板33的下表面接触,改变限位顶杆41的位置,限位板43同步向下运动,改变限位状态;限位顶杆41与定位挡板33的表面停止接触后,在弹簧的作用下,限位板43向上运动,回到限位状态。
65.图6是定位夹紧装置的夹紧机构示意图,图7是夹具装夹装置夹紧机构俯视角结构示意图。如图6所示,夹紧机构基板414通过螺栓连接到基板42上。夹紧顶杆48依次穿过左第一连杆415上的长圆形孔、右第一连杆49的长圆形孔和夹紧机构基板414的长圆形孔,它们之间是槽口连接。左第一连杆415和右第一连杆49的靠近中间的圆孔分别与夹紧机构基板414的左右两边的圆孔组成铰链。左第一连杆415的靠近端部的圆孔与左第二连杆413的一端通过铰链配合,右第一连杆49的靠近端部的圆孔与右第二连杆410的一端通过铰链配合。左第二连杆413与右第二连杆410的另一端分别左压紧连杆412和右压紧连杆411的一端的轴孔配合,左压紧连杆412和右压紧连杆411的另一端与基板42形成铰链。左第一连杆415和左第二连杆413和左压紧连杆412组成左侧的四连杆机构,右第一连杆49和右第二连杆410和右压紧连杆411组成右侧的四连杆机构。夹紧顶杆48在夹紧机构基板的长圆形孔的限制下,只能进行上下位移,并通过四连杆机构分别带动左压紧连杆412和右压紧连杆411实现压紧和放松。随行夹具9上有多个预留的凹槽,在限位板43的作用下,凹槽正处于左压紧连杆412和右压紧连杆411的正下方。左压紧连杆412和右压紧连杆411在压紧状态下扣入槽内,实现更精准的限位。在产线输送链3的运动过程中,夹紧顶杆48与夹紧挡板41的表面接触,从而带动夹紧顶杆向上运动,左压紧连杆412和右压紧连杆411脱离随行夹具9上的凹槽,放松随行夹具9。当夹紧顶杆48脱离夹紧挡板41后,左压紧连杆412在左第一扭簧418和左第二扭簧419的作用下压入随行夹具9上的凹槽,右压紧连杆411在右第一扭簧416和右第二扭簧417的作用下压入随行夹具9上的凹槽,压紧随行夹具9。上述夹紧机构有两组,对称分布在产线输送链3的两侧。
66.末端执行器8的总体结构如图8所示,功能实现部分结构图如图9所示,传动机构结构如图10所示,锁紧机构结构如图11所示。末端执行器采用对称设计,这里只详细介绍其中一侧。整个机构通过机器人连接盘83连接到机械臂7末端,机器人连接盘83靠三个第一支撑套筒84与第二安装板82隔开一段距离,给同步带传动机构留空间。末端执行器8通过由气动驱动,左右两侧各有一个平行二指夹爪,平行二指气缸810上安装有左夹爪811和右夹爪812。夹爪安装盘814通过螺栓连接到平行二指气缸810的底端,夹爪安装盘814和夹爪驱动轴88之间通过键连接,限制夹爪安装盘814转动。夹爪驱动轴88与夹爪安装盘814配合的一端有螺栓孔,通过螺栓将夹爪安装盘814与夹爪驱动轴88连接,限制夹爪安装盘814轴向运动。驱动轴第一轴承813与第一安装板81通过螺栓连接,驱动轴第二轴承819与第二安装板
82通过螺栓连接。夹爪驱动轴88的轴肩的左右两侧分别安装驱动轴第一止推轴承89和驱动轴第二止推轴承818,限制夹爪驱动轴在第一安装板81和第二安装板82之间的轴向运动,第一安装板81和第二安装板82之间通过螺栓连接。末端执行器8的模式转换由旋转驱动器87提供动力,旋转驱动器87通过螺栓连接到第一安装板81上。旋转驱动器连接件815与旋转驱动器87通过螺栓连接,主动轴816与旋转驱动器连接件815通过紧定螺钉连接。主动轴816穿过主动轴轴承817实现轴向定位,主动轴轴承817通过螺栓安装在第二安装板82上。旋转驱动器87的动力通过同步带机构输送到夹爪驱动轴88,从而实现形态转换。本实施例中旋转驱动器87优选为旋转气缸,在其他实施例中也可以是伺服电机等其他常见旋转驱动器。在其他实施例中,若采用机器视觉识别方式,则可在旋转驱动器87上通过相机安装板86安装相机85用于图像传感进而实现机器视觉。
67.同步带传动机构如图10所示,主动轴816和主动轮824通过紧定螺钉连接,主动轴816与主动轮824连接部分的末端存在螺栓孔,通过螺栓将主动轮824进一步与主动轴固连。主动轮824通过同步带821同时驱动左从动轮825和右从动轮820,从而实现控制两个夹爪驱动轴88的转动,实现末端执行器8的姿态转换。与主动轮824的连接方式相似,左从动轮825和右从动轮820与两个夹爪驱动轴88通过紧定螺钉和螺栓实现固连。两个张紧轮823对称分布在主动轮824的左右两侧,张紧轮823通过螺栓与张紧轮轴822实现销配合,张紧轮轴822通过螺栓与第二安装板82固连,可通过调整张紧轮轴822在第二安装板上的长圆形孔中的位置来调整同步带821的张紧程度。
68.锁紧机构结构图如图11所示,锁紧机构用于末端执行器形态转换后锁紧姿态,防止末端夹爪因受力发生姿态变化。锁紧机构安装在第一安装板81上,通过笔形气缸829驱动。笔形气缸829与笔形气缸安装板833通过螺栓固连,然后再通过螺栓将笔形气缸安装板833固连到笔形气缸连接块832上,将上述作为整体通过螺栓固连到第一安装板81上。固定销连接板826通过螺栓连接到笔形气缸829的伸出杆上,另有螺栓穿过两个长圆形孔与左固定销830和右固定销828相连。左固定销830穿过左滑动轴承831定位,右固定销828穿过右滑动轴承827定位。左固定销830和右固定销828穿过夹爪安装盘814上预设的孔,限制对夹爪安装盘814的角度,实现对末端执行器8的姿态锁定。
69.本发明的工作流程如下:
70.步骤1:第一流水线3上的夹具装夹装置4携带随行夹具9运行至工位a。
71.步骤2:夹具转移机构2将随行夹具9转移至第二流水线1的工位b上待命的夹具装夹装置4,然后第一流水线3上空载的夹具装夹装置4运行至工位e待命。
72.步骤3:第二流水线1上的夹具装夹装置4携带随行夹具9运行至工位c,机械臂7从上游产线将鸡肉胴体转移至工位c上的随行夹具9;优选地,机械臂7从上游产线将鸡肉胴体转移至工位c上的随行夹具9的具体方法如下:鸡肉胴体倒挂于第二流水线1的挂钩上,机械臂7带动末端执行器8以定点夹取或机器视觉识别夹取的方式从挂钩上夹住鸡脚,然后将鸡肉胴体取下,再以预定轨迹移动或通过图像识别随行夹具9再移动的方式将鸡肉胴体正套在随行夹具9上。
73.步骤4:进行鸡肉胴体分割。优选地,本实施例直接由机械臂7的末端执行器8执行翅胸撕扯分割,具体地,两个平行二指夹爪以水平姿态将鸡肉胴体装夹到位后,由旋转驱动器87驱动两个平行二指夹爪分别旋转为竖直姿态,再由机械臂7带动两个平行二指夹爪夹
住并撕扯鸡翅。优选地,本实施例中末端执行器8采用定点装夹和定点撕扯,即将鸡肉胴体装夹至指定位置,并在指定位置撕扯鸡翅。由于鸡胸肉与鸡翅根具有一定的连接力,同时撕扯双翅会将鸡胸肉一并扯下,从而完成翅胸一体分离。
74.步骤5:第二流水线1上的夹具装夹装置4携带随行夹具9转移分割后翅胸肉之后剩余的鸡肉胴体至工位d。
75.步骤6:同一个或者另一个夹具转移机构2将随行夹具9转移至第一流水线3的工位e上待命的夹具装夹装置4,然后分割后的鸡肉胴体随第一流水线3向下游移动,由下游产线进行其他处理。
76.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。