1.本发明涉及腰椎微创手术技术领域,具体涉及一种机器人辅助镜下融合技术方法。
背景技术:
2.随着医疗技术的进步、人民对生活水平要求的不断提高以及微创手术器械的发展,脊柱微创手术凭借其创伤小、恢复快等优势,已经成为了目前脊柱外科最常见的手术技术。由脊柱内镜发展而来的镜下融合技术不仅结合了经皮椎弓根螺钉内固定技术,而且可以借助工作管道植入椎间融合器,重建患者腰椎稳定性,为腰椎滑脱患者的微创手术治疗提供了一种理想的手术方式。
3.传统的镜下融合技术中经皮椎弓根螺钉植入和内镜工作通道放置等步骤一般都是由术者在术中透视的引导下,结合自身经验徒手完成的。这种技术方法存在一定的弊端:(1)徒手经皮椎弓根螺钉骨性通道的钻取和术中透视引导是两个分开的步骤,术者一般需要凭借自己经验钻取一定深度的骨性通道后暂停操作,由台下工作人员调整c臂机位置对目标位置透视后,再根据透视影像对螺钉的规划路线进行调整。这一过程不仅步骤繁琐,手术时间延长,而且导致术者及患者暴露在大剂量的辐射之下;(2)工作管道的放置是镜下融合手术的关键步骤,工作管道的放置的位置和角度不仅影响着术者操作的自由度,而且决定了镜下器械(如髓核钳、环锯、铰刀和刮匙等)与组织结构的相对位置,在一定程度上决定了手术的成败。徒手放置工作管道存在时间长、准确度低、神经根损伤风险增加等问题。
4.因此,发明一种机器人辅助镜下融合技术方法来解决上述问题很有必要。
技术实现要素:
5.本发明的目的是提供一种机器人辅助镜下融合技术方法,该技术同脊柱手术机器人有机结合,以解决上述背景技术中传统镜下融合技术存在的关键问题。
6.为了实现上述目的,本发明提供如下技术方案:一种机器人辅助镜下融合技术方法,包括如下步骤:
7.步骤一,数据准备:术前收集手术患者的腰椎三维ct影像学资料,并传输到机器人主机,以便进行下一步手术规划;
8.步骤二,对经皮椎弓根螺钉的植入路径进行规划;
9.步骤三,对脊柱内镜工作通道规划;
10.步骤四,对镜下环锯规划;
11.步骤五,对镜下器械的路径规划。
12.优选的,在步骤二中由于镜下融合技术多在单个节段开展,因此利用机器人在术前就实现对“一孔双钉”的设计,所谓“一孔双钉”,即在单侧实现经同一皮肤切口,约2-3cm,在上下两个椎体分别植入椎弓根螺钉的手术技术,同时通过术前规划获得每个螺钉的最佳长度和直径,个性化的挑选螺钉,避免了术中对螺钉的更换。
13.优选的,在步骤三中利用机器人对脊柱内镜路径进行规划,可以获得精确的皮肤穿刺点以及工作管道的目标靶点、植入角度和植入深度,精确定位,为后续的镜下操作奠定基础。
14.优选的,在步骤四中在对脊柱内镜工作管道规划的基础上,通过工作管道规划路线,可以获得工作管道目标靶点到关节突腹侧皮质骨的精确距离,从而可以在切除关节突时精确把握环锯的植入深度,避免对神经的损伤。
15.优选的,在步骤五中以工作管道的规划路线为基础,进一步根据镜下器械(如髓核钳、铰刀和刮匙等)的目标位置对其角度和深度进行规划,避免对椎间盘和椎间隙处理过度或不充分。
16.在上述技术方案中,本发明提供的技术效果和优点:
17.1.缩短了手术时间,在脊柱手术机器人的辅助下,简化大部分术中透视的步骤,并且对每一步操作进行了精准设计,术者在操作之前就已经做到心中有数,大大节约了手术时间;
18.2.保证了手术效果,且对患者损伤小,根据每个患者的实际情况对螺钉的规格和路径进行了个性化设计,避免重复置钉,对工作管道和手术器械的路径进行了精确规划,避免了术中对管道的多次调整、对肌肉的过度牵拉以及术中对骨性结构不必要的切除;因此患者术后创伤小、恢复快、生活质量高、并发症少。
附图说明
19.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
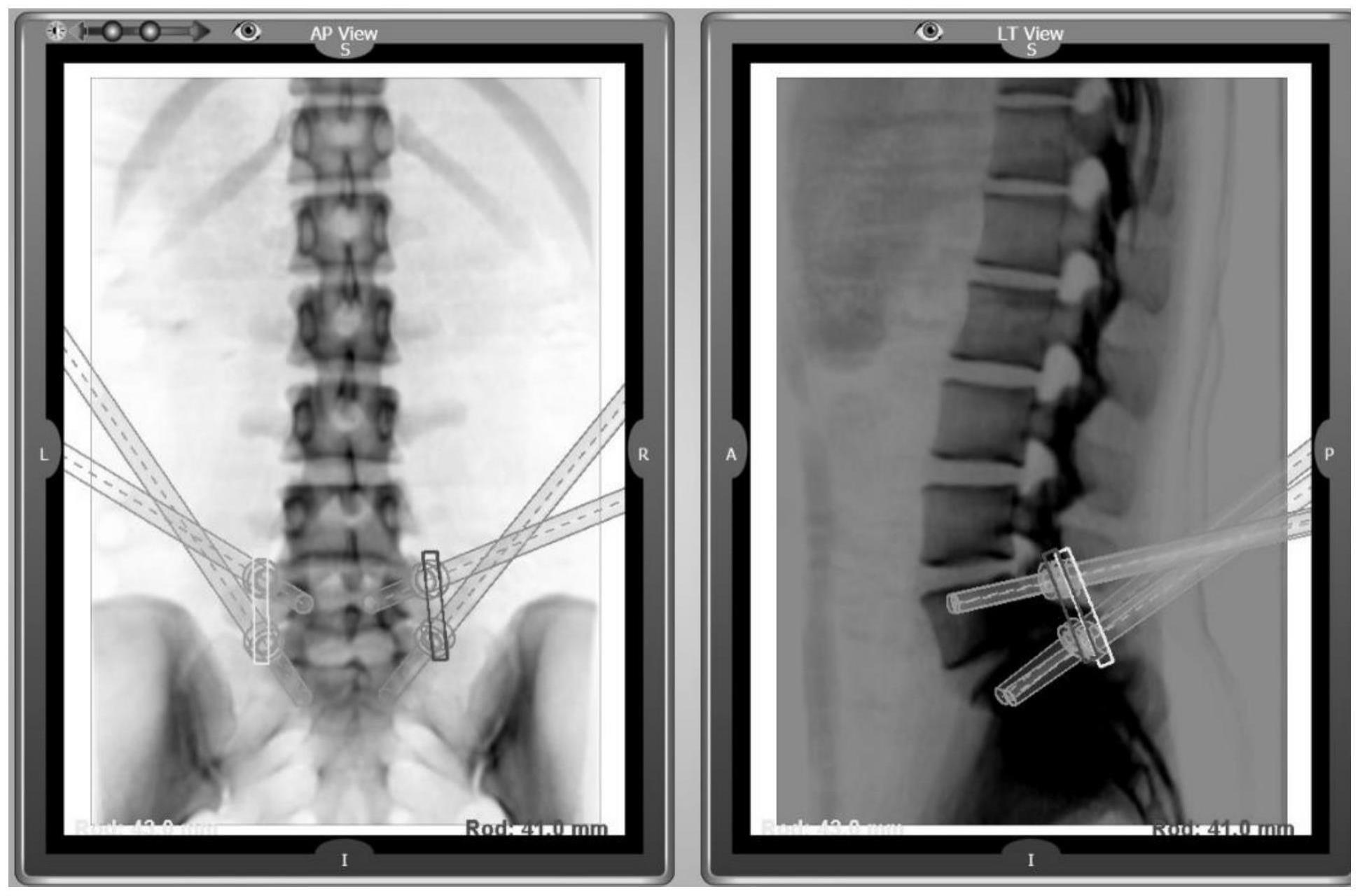
20.图1为本发明的对经皮椎弓根螺钉的植入路径进行规划图;
21.图2为本发明的对经皮椎弓根螺钉的植入路径进行规划图;
22.图3为本发明的对经皮椎弓根螺钉的植入路径进行规划图;
23.图4为本发明的对脊柱内镜工作通道的规划图;
24.图5为本发明的对脊柱内镜工作通道的规划图;
25.图6为本发明的对在工作通道基础上对镜下环锯的规划图;
26.图7为本发明的对在工作通道基础上对镜下器械的路径规划图。
具体实施方式
27.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
28.附图1所示:对经皮椎弓根螺钉的植入路径进行规划。由镜下融合技术多在单个节段开展,因此可以利用机器人在术前就实现对“一孔双钉”的设计,即在单侧实现经同一皮肤切口(约2-3cm)准确植入两枚螺钉的手术技术;
29.附图2、3所示:对经皮椎弓根螺钉的植入路径进行规划。同时可以获得每个螺钉的长度和直径,个性化的挑选螺钉,避免了术中重复置钉。
30.附图4、5所示:对脊柱内镜工作通道的规划。利用机器人对脊柱内镜路径(螺钉之
间的细标线)进行规划,可以获得精确的皮肤穿刺点以及工作管道的目标靶点、植入角度和植入深度,精确定位,为后续的镜下操作奠定基础。
31.附图6所示:对镜下环锯的规划:在对脊柱内镜工作管道规划(细标线)的基础上,通过工作管道规划路线,可以获得工作管道目标靶点到关节突腹侧皮质骨的精确距离(5.0mm细线),从而可以在切除关节突时精确把握环锯的植入深度,避免对神经的损伤。
32.附图7所示:对镜下器械的路径规划。以工作管道的规划路线(细标线)为基础,进一步根据镜下器械(如髓核钳、铰刀和刮匙等)的目标位置对其角度、深度和路径进行规划(螺钉之间的标线),避免对椎间盘和椎间隙处理过度或不充分。
33.除术前规划的步骤外,其余步骤与传统镜下融合技术相同。术中根据术前规划,严格操作,确保手术的精确、安全。
34.以上对本发明及实施方式进行了描述,这种描述没有限制行,实际技术方式也并不局限于此。总而言之,如果本领域的人员受到启发,在不脱离本发明创造宗旨的前提下,不经创造性的设计出与该技术方案相似的技术方式,均应属于本发明的保护范围。
技术特征:
1.一种机器人辅助镜下融合技术方法,其特征在于:包括如下步骤:步骤一,数据准备:术前收集手术患者的腰椎三维ct影像学资料,并传输到机器人主机,以便进行下一步手术规划;步骤二,对经皮椎弓根螺钉的植入路径进行规划;步骤三,对脊柱内镜工作通道规划;步骤四,对镜下环锯规划;步骤五,对镜下器械的路径规划。2.根据权利要求1所述的一种机器人辅助镜下融合技术方法,其特征在于:在步骤二中由于镜下融合技术多在单个节段开展,因此利用机器人在术前就实现对“一孔双钉”的设计,所谓“一孔双钉”,即在单侧实现经同一皮肤切口,约2-3cm,在上下两个椎体分别植入椎弓根螺钉的手术技术,同时通过术前规划获得每个螺钉的最佳长度和直径,个性化的挑选螺钉,避免了术中对螺钉的更换。3.根据权利要求1所述的一种机器人辅助镜下融合技术方法,其特征在于:在步骤三中利用机器人对脊柱内镜路径进行规划,可以获得精确的皮肤穿刺点以及工作管道的目标靶点、植入角度和植入深度,精确定位,为后续的镜下操作奠定基础。4.根据权利要求1所述的一种机器人辅助镜下融合技术方法,其特征在于:在步骤四中在对脊柱内镜工作管道规划的基础上,通过工作管道规划路线,可以获得工作管道目标靶点到关节突腹侧皮质骨的精确距离,从而可以在切除关节突时精确把握环锯的植入深度,避免对神经的损伤。5.根据权利要求1所述的一种机器人辅助镜下融合技术方法,其特征在于:在步骤五中以工作管道的规划路线为基础,进一步根据镜下器械的目标位置对其角度和深度进行规划,避免对椎间盘和椎间隙处理过度或不充分。
技术总结
本发明公开了一种机器人辅助镜下融合技术方法,包括如下步骤:步骤一,数据准备:术前收集手术患者的腰椎三维CT影像学资料,并传输到机器人主机,以便进行下一步手术规划;步骤二,对经皮椎弓根螺钉的植入路径进行规划;步骤三,对脊柱内镜工作通道规划;步骤四,对镜下环锯规划;步骤五,对镜下器械的路径规划。本发明缩短了手术时间,在脊柱手术机器人的辅助下,简化大部分术中透视的步骤,并且对每一步操作进行了精准设计,术者在操作之前就已经做到心中有数,大大节约了手术时间,并且保证了手术效果,患者术后创伤小、恢复快、生活质量高、并发症少。并发症少。
技术研发人员:马学晓 周传利 张豪 王超
受保护的技术使用者:青岛大学附属医院
技术研发日:2022.01.04
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
