技术特征:
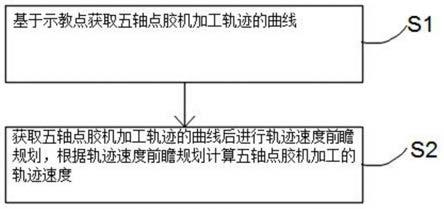
1.一种计算五轴点胶机加工轨迹速度的方法,其特征在于,包括以下步骤:步骤s1.基于示教点获取五轴点胶机加工轨迹的曲线;步骤s2.获取五轴点胶机加工轨迹的曲线后进行轨迹速度前瞻规划,根据轨迹速度前瞻规划计算五轴点胶机加工的轨迹速度。2.根据权利要求1所述的一种计算五轴点胶机加工轨迹速度的方法,其特征在于,所述步骤s1包括:步骤s1.1.将待加工工件装夹在五轴点胶机上,在工件的加工轨迹上选取若干采样点作为示教点,通过点胶机的上位机控制软件驱动针阀对准工件上的采样点,获得示教点的机械坐标;步骤s1.2.将示教点的机械坐标转换为世界坐标系,并计算出加工点位和针阀矢量;步骤s1.3.将示教点按相应的示教元素进行计算,获取世界坐标系下的轨迹方程;步骤s1.4.根据轨迹方程进行插值运算,获取世界坐标系下的插补点坐标、针阀矢量和相邻插补点间的位移长度;步骤s1.5.实际加工时根据测量到的装夹误差对插补点进行纠偏;步骤s1.6.进行运动学逆变换,获取五轴点胶机加工轨迹插补点对应的机械坐标。3.根据权利要求2所述的一种计算五轴点胶机加工轨迹速度的方法,其特征在于,所述步骤s1.3中的示教元素包括直线、圆弧和样条曲线。4.根据权利要求1所述的一种计算五轴点胶机加工轨迹速度的方法,其特征在于,所述步骤s2中进行轨迹速度前瞻规划包括:标定五轴点胶机的机械结构参数,所述五轴点胶机的机械结构包括平动轴x轴、平动轴y轴、平动轴z轴、转动轴a轴和转动轴c轴,各个轴对应的最大加工速度分别为vmax_x、vmax_
y
、vmax_z、vmax_
a
和vmax_c,各个轴对应的最大加速度分别为amax_x、amax_
y
、amax_z、amax_
a
和amax_c,各个轴对应的最大瞬时速度跳变差分别为δvx、δv
y
、δvz、δv
a
和δvc;将加工刀具针阀相对加工工件运动的过程称为虚拟轴运动,即将五个物理轴耦合成一个虚拟的单一的轴;将离散出来的两两插补点之间作为一个微段,设共有n个微段,n 1个加工点,虚拟轴在加工轨迹对应的微段区间上的实际位移为物理轴在微段上的实际位移为xi、yi、zi、ai和ci,某一加工点节点的上限速度为某一微段的起点速度为v
si
,结束速度为虚拟轴的最大速度为最大加速度为amax。5.根据权利要求1所述的一种计算五轴点胶机加工轨迹速度的方法,其特征在于,所述步骤s2中根据轨迹速度前瞻规划计算五轴点胶机加工的轨迹速度的方法包括:步骤s2.1.根据五个轴的最大加工速度、最大加速度、最大瞬时速度跳变差和n 1个微段的加工点坐标计算起点速度v
si
,结束速度和各加工点的上限速度步骤s2.2.根据第i个微段的起点速度v
si
进行规划;步骤s2.3.判断上限速度是否可以达到当前微段的位移li,如果是,进入步骤
s2.4,如果否,根据终点速度计算起点速度v
si
,并更新上一个微段的结束速度上线令并回退至步骤s2.2,令微段i=i-1;步骤s2.4.判断此微段是否为最后一个微段,如果是,输出前瞻计算结果,前瞻计算完毕,如果否,进入步骤s2.5;步骤s2.5.进行下一段规划,令令微段i=i 1,并返回步骤s2.2。6.根据权利要求4所述的一种计算五轴点胶机加工轨迹速度的方法,其特征在于,包括:根据物理轴速度上限获取第i个微段虚拟轴速度上限根据相邻微段加工点的虚拟轴速度相同和物理轴的速度跳变上限求得各个加工点的虚拟轴速度上限根据五轴加速度上限获取当前微段虚拟轴加速度上限根据起始点速度获取最小起点速度v
s0
,即加工起始点速度;根据结束点速度获取加工结束点速度即第n 1个加工点的速度上限。7.根据权利要求1所述的一种计算五轴点胶机加工轨迹速度的方法,其特征在于,所述步骤s2中五轴点胶机加工轨迹的插补微段的曲线类型包括一段曲线、二段曲线和三段曲线,其中:一段曲线包括三种情况;二段曲线包括三种情况;三段曲线包括一种情况;根据一段曲线、二段曲线和三段曲线的不同情况结合轨迹速度前瞻规划完成整段加工轨迹的速度曲线的速度规划。8.根据权利要求7所述的一种计算五轴点胶机加工轨迹速度的方法,其特征在于,规划五轴点胶机加工轨迹的曲线的方法包括:从第一个微段开始,依次往下一个节点进行速度规划,若无法满足某一轨迹节点的速度限制,则回退一个轨迹节点,再进行速度规划,直至规划结束;对当前微段进行规划,得到当前微段信息和下一微段起始节点信息,确定当前微段为一段曲线、二段曲线和三段曲线中的何种情况,并完成节点速度计算。
技术总结
本发明涉及五轴点胶加工技术领域,公开了一种计算五轴点胶机加工轨迹速度的方法,包括以下步骤:步骤S1.基于示教点获取五轴点胶机加工轨迹的曲线;步骤S2.获取五轴点胶机加工轨迹的曲线后进行轨迹速度前瞻规划,根据轨迹速度前瞻规划计算五轴点胶机加工的轨迹速度。本发明能够在保证计算和存储轻量的前提下进行高效的五轴点胶机加工轨迹的速度规划,使得加工过程稳定且高效。本发明计算简便,实现成本更低,用于对经济性要求更高的点胶行业,且发不需考虑刀具、针阀与工件之间的接触产生的应力,因此数学模型更为简洁。因此数学模型更为简洁。因此数学模型更为简洁。
技术研发人员:瞿佳伟 张春雷 苏爱林 周维 夏光明
受保护的技术使用者:成都乐创自动化技术股份有限公司
技术研发日:2021.12.18
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。