1.本发明涉及光学检测技术,尤指一种针对大曲率x射线波前和大曲率x射线光学元件面形的基于近场散斑的曲面波前与面形高精度检测方法。
背景技术:
2.波前的原始定义指波在介质中传播时,某时刻刚刚开始位移的质点构成的面。它代表某时刻波能量到达的空间位置。波前是一种波面(也称波阵面)。波面是波源发出的振动在介质中传播相同时间所到达的各点组成的面。同一波面上各点的振动相位相同。走在最前面的波面称为波前。波前质点的振动情况与波源初始振动情况相同。在光学中,波前的定义有所引申,可指探测器面上光场的振幅和相位分布。在各向同性的介质中,波线(光学中的射线)与波面垂直。因此,使用射线或波前来研究波是等效的。
3.现有的近场散斑波前检测技术中,最具代表性的是x射线散斑追迹(以下简称为xst)和x射线散斑扫描(以下简称为xss)。二者均利用近场散斑标记光线的轨迹,追踪由待测光学元件引起的光线落点的位移,进而测得光线的折射角、对应的波前和待测光学元件面形。
4.xst(x-ray speckle tracking)和xss(x-ray speckle scanning)在原理上的主要区别是,前者的追踪过程在探测器平面上进行,后者在散斑生成器平面进行。因此,前者的检测精度主要受限于探测器的像素尺寸,后者的检测精度主要受限于散斑生成器的扫描步长。由于位移台的位移精度可远高于像素尺寸,因此xss的角度灵敏度也远高于xst。另一方面,xst只需采集两幅图像,可在数秒内完成数据的采集。而xss所需的数据量与待测角度的范围,即待测元件面形的曲率呈正比,采集数据所需的时间很长。
5.以底面曲率半径为50微米的复合折射透镜(以下简称crl)为例,当入射光能量为15kev时,其最大折射角约13.5μrad,若采用xst进行二维检测,只需数秒钟;若采用xss进行二维检测需上千小时,已不可能实现。因此,虽然xss的检测精度很高,但现有技术因所需时间太长而无法检测曲面面形;xst的检测速度很快,但检测精度不能满足先进的光学元件的需求。目前尚无大曲率x射线波前的高精度检测方法,现有的大曲率x射线光学元件面型检测方法基于可见光,例如3d共聚焦激光显微镜,但此类技术无法检测元件的内部信息(如密度、孔隙度等)。
技术实现要素:
6.为解决高精度检测曲面波前和面形的难题,本发明旨在提出一种新的基于近场散斑的曲面波前与面形高精度检测方法。
7.本发明采用的技术方案是:一种基于近场散斑的曲面波前与面形高精度检测方法,所述的检测技术利用散斑在其“近场”区域不发生形变的特性来追踪光线轨迹,根据光线的偏折角度,即待测波前的一阶导数来恢复波前,其中光线落点的整像素位移采用xst技术测量,亚像素位移采用xss技术测量。
8.所述的散斑由散斑生成器在x射线光路中生成,散斑生成器对入射光的波前进行调制,将其厚度或折射率分布的随机性赋予波前,同时入射光在传播过程中波前的高频随机分布保持不变。采用该技术进行波前检测时,x射线光束经过待测光学元件时,由于待测光学元件的作用而发生相移,进而引起光线传播方向的偏转,该偏折角度α与波前w存在如下关系:
9.α
x
=θw/θx
10.αy=θw/θy
11.在技术实现上,借助计算机和数字图像处理技术,通过散斑图样之间的互相关计算可以获得散斑图样各区域的微小位移v,由位移v可计算得到光线传播方向的偏折角度α,根据以上两式对α进行积分可得到波前w。待测光学元件的面形(厚度t)根据w=δt计算,其中δ是待测光学元件材料的复折射率的折射项。
12.所述的xst技术利用近场散斑特性进行波前检测,当x射线的偏折角α满足小角假设时,其求解公式为:α=v1/l3;其中,v1为光线经过待测光学元件而发生偏折时,散斑图样发生的位移;l3为待测光学元件和探测器平面的距离;通过有无待测光学元件两种情况中的对应信号之间的图像匹配来测量二者之间距离v1,确定光线传播方向的偏折角度α,并进一步由α恢复波前。
13.所述的xss技术利用散斑图样对光线轨迹进行追踪,光线的偏折角度α可根据下式计算得出:
14.α=v1/l3=(v2/l3)*v1/v2=(v2/l3)*(l1 l2 l3)/l115.其中,v1是波前某一面元由待测光学元件造成的在探测器面上的位移,v2是散斑生成器平面上与v1对应的位移,l1为光源与散斑生成器间的距离,l2为散斑生成器与待测光学元件间的距离,l3为待测光学元件与探测器间的距离;光线经过待测光学元件时,光线发生偏折并且在探测器面上随机信号发生位移v1,这一位移对应散斑生成器的位移v2,通过有无待测光学元件两种情况中的对应信号之间的图像匹配计算在散斑生成器面上的相对位移v2,可确定光线传播方向的偏折角度α,并进一步由α恢复波前。
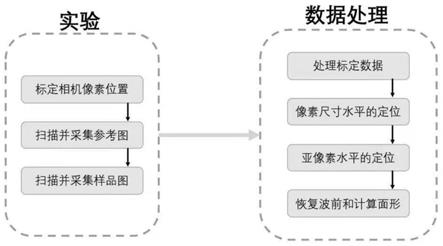
16.所述的检测技术的实施过程分为实验和数据处理两大部分。在实验部分,需精确标定探测器像素位置、扫描散斑生成器采集参考图和扫描散斑生成器采集样品图。在数据处理部分,需处理探测器像素标定数据、计算整像素位移、计算亚像素位移和恢复波前。
17.实验部分可分为三步:精确标定探测器像素位置、扫描散斑生成器采集参考图和扫描散斑生成器采集样品图。探测器像素之间距离的精度低于位移台的扫描步长精度,因此需使用高精度位移台标定探测器像素之间的距离,将其精度提升到与位移台相同的水平。由于散斑图像的标记特性,由高精度位移台以固定步长在散斑光路中扫描探测器,即可实现对探测器像素之间距离的标定。第二步和第三步(即扫描散斑生成器采集参考图和扫描散斑生成器采集样品图)与xss完全一致,分别在待测光学元件退出和进入光路的情况下,以固定步长扫描散斑生成器并采集散斑图像。
18.检测技术中的数据处理可分为四步,包括探测器像素标定数据的处理、计算整像素位移、计算亚像素位移和恢复波前,具体步骤如下:
19.s1、探测器像素标定数据的处理:
20.标定数据的处理基于数字图像处理技术,采用互相干算法等手段,利用散斑信号
的标记性质和位移台的高精度定位,可计算出探测器面上任意两个像素之间的距离,去除显微系统像差造成的畸变。这一步得到的是任意两个像素中心之间的距离。
21.s2、计算整像素位移:当待测元件处于光路中时,采集的图像为样品图,光线如实线所示,在探测器的落点为a(指定a点为某一像素中心);当待测元件退出光路时,采集的图像为参考图,光线如无箭头虚线所示,在探测器的落点为b(b点不一定位于某一像素中心)。利用xst技术所采用的数字图像处理方法,可根据a点处的信号定位出与a点对应的b点。此处不采用插值算法,因此这一测量的最小单位是探测器像素尺寸,只能定位至距b点最近的像素b’。根据s1的结果,这一步实际得到的是a和b’之间的距离。
22.s3、计算亚像素位移:本实施例中,采用xss技术测量亚像素水平的位移,可达到纳米水平精度。当扫描散斑生成器时,各光线同时在散斑生成器上扫过一段距离,并携带由这部分散斑生成器决定的独特的标记信号。因此,在b和b’点对应的光强-步长曲线之间进行互相关计算,可得到与bb’对应的散斑生成器平面上的ss’的长度。根据几何关系,bb’/ss’=(l1 l2 l3)/l1,可计算得出b与b’之间距离。由于探测器是由离散的像素组成,因此很可能b点光强信号没有被任何像素准确记录。这一问题可通过a点与b点的对应关系得到解决。由光路图易得,待测元件处于光路时a所在光线和待测元件不处于光路时b所在光线扫过散斑生成器的同一区域,因此,样品图中a点的信号与参考图中b点的信号完全一致。所以bb’的距离可通过样品图中a像素所记录的信号和参考图中b’所记录的信号之间的互相关计算得到。
23.s4、波前的恢复:综上,通过xst技术可测得距离ab’,通过xss技术可测得距离bb’,二者相加或相减,可得到恢复波前所需的位移ab。由位移ab可计算得到光线传播方向的偏折角度α,对α进行积分可得到波前w。
24.简而言之,本发明的主要创新在于:采用位移台标定探测器有效像素的相对位置,将探测器有效像素相对位置的精度提高到位移台水平;光线落点的整像素位移在探测器平面快速测量,亚像素位移在位移台平面进行精细扫描,同时达到高速和高精度的效果。
25.本发明的有益效果是:该技术将xst与xss结合起来,综合了xst和xss的优势,检测性能相比二者均有提升。其角度灵敏度可达纳弧度水平,远高于现有xst亚微弧度水平的性能;空间分辨力达到像素尺寸水平;角度测量范围达到数十微弧度;其检测时长不再随角度测量范围变化,而只与检测精度(扫描步长)相关,在保持检测精度的前提下,大幅减少检测所需数据量和检测时长。对于曲面面形纳弧度水平的二维检测,可在一到两小时间完成检测,远远低于现有xss技术的上千小时。
附图说明
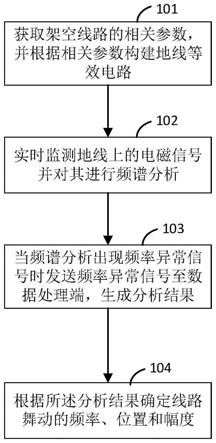
26.图1是本发明的流程图。
27.图2是本发明中近场散斑波前检测技术的基本原理示意图。
28.图3是本发明中由角度α重建波前w的示意图。
29.图4是本发明中xst的光路示意图。
30.图5是本发明中xss的光路示意图。
31.图6是实施例的光路示意图。
具体实施方式
32.以下结合说明书附图详细说明本发明的具体实施方式:
33.如图1所示,一种基于近场散斑的曲面波前与面形高精度检测方法,该技术的实施过程分为实验和数据处理两大部分。在实验部分,需精确标定探测器像素位置、扫描散斑生成器采集参考图和扫描散斑生成器采集样品图。在数据处理部分,需处理探测器像素标定数据、计算整像素位移、计算亚像素位移和恢复波前。
34.如图2所示,本发明中的基于近场散斑的曲面波前与面形高精度检测方法利用散斑在其“近场”区域不发生形变的特性来追踪光线轨迹,根据光线的偏折角度,即待测波前的一阶导数来恢复波前。其测量原理可以从散斑的产生、散斑特性的保持和波前的检测三部分进行说明。1)散斑由散斑生成器在x射线光路中生成,散斑生成器通常选用砂纸或带有随机小孔的高分子材料薄膜。散斑生成器对入射光的波前进行调制,将其厚度或折射率分布的随机性赋予波前。因此,经调制后的波前中的任意一块足够大的区域也带有独自的高频分布,可以与任何其它区域区别开来。2)近场散斑波前检测要求在x射线的传播过程中波前的高频随机分布保持不变,只有在深菲涅尔区内该条件才能得到满足。在x射线光学中,深菲涅尔区的范围通常为数米,该技术需在这一范围内实施。3)波前的检测原理如图3所示,当x射线光束经过待测光学元件时,由于待测光学元件作用而发生相移,进而引起光线传播方向的偏转,该偏折角度α与波前w存在如下关系:
35.α
x
=θw/θx
36.αy=θw/θy
37.在技术实现上,借助计算机和数字图像处理技术,通过散斑图样之间的互相关计算可以获得散斑图样各区域的微小位移v,由位移v可计算得到光线传播方向的偏折角度α,根据以上两式对α进行积分可得到波前w。待测光学元件的面形(厚度t)根据w=δt计算,其中δ是待测光学元件材料的复折射率的折射项。
38.本发明中xst是一种利用近场散斑特性进行波前检测的技术。相比其它技术路线,xst的优势在于实验流程简单,基本原理如图4所示。x射线光学元件造成的光线偏折通常为微弧度或更小量级,满足小角假设。因此图4中的角度α可以直接由位移v1和距离l3计算得出,如公式所示:α=v1/l3;显然xst的角度分辨能力由v1和l3决定,而v1由探测器像素尺寸和算法精度共同决定。此外,xst处理数据时可利用插值算法进一步提高角度分辨能力。提升的程度与信噪比等实验实际情况紧密相关,一般认为该增益为一个量级。空间分辨能力由互相关计算的空间分辨能力决定,该参数最终取决于散斑的尺寸。
39.在xst技术中,光线经过散斑生成器时被调制而携带随机信号,并且这一信号不会随光场的传播发生形变。经过待测光学元件时,光线发生偏折而随机信号发生位移v1。通过寻找有无待测光学元件两种情况中对应的信号(即方块目标子块和参考子块),可以测量二者之间距离v1,确定光线传播方向的偏折角度α,并进一步由α恢复波前。显而易见,xst所需采集的数据量少,检测速度快,但角度测量精度和空间分辨能力较低。
40.本发明中xss技术的基本原理如图5所示,其中图5中左上
①
部分为xss的散斑生成器面上光强随扫描步数变化的完整曲线,包含样品信号和参考信号;右上
②
是本发明中xss光路中探测器平面上的样品信号,对应待测光学元件处于光路中的情况;右下
③
是本发明中xss光路中探测器平面上的参考信号,对应待测光学元件不处于光路中的情况。同样利用
散斑图样对光线轨迹进行追踪,光线的偏折角度α可根据下式计算得出:
41.α=v1/l3=(v2/l3)*v1/v2=(v2/l3)*(l1 l2 l3)/l142.式中,v1是波前某一面元由待测光学元件造成的在探测器面上的位移,v2是散斑生成器平面上与v1对应的位移,l1为光源与散斑生成器间的距离,l2为散斑生成器与待测光学元件间的距离,l3为待测光学元件与探测器间的距离。显然xss的角度分辨能力由上式中各项共同决定,但其中起到重要作用的是v2和l3。v2取决于位移台精度和算法精度。xss的空间分辨能力与探测器一致。同样的,xss处理数据时可利用插值算法进一步提高角度分辨能力。
43.xss技术中,光线经过散斑生成器时被调制而携带随机信号,由于散班生成器的扫描,波前任一面元对应光强随扫描步数变化的曲线,经过待测光学元件时,光线发生偏折并且在探测器面上随机信号发生位移v1,这一位移对应散斑生成器的位移v2,通过寻找有无待测光学元件两种情况中对应的信号,在散斑生成器面上的相对位移v2,此时可确定光线传播方向的偏折角度α,并进一步由α恢复波前。
44.xss与xst的不同之处在于散斑位移的测量过程从探测器平面转移到了散斑生成器平面。因此,角度灵敏度的决定因素由探测器像素尺寸变为位移台精度,这一变化突破了xst测量能力的上限。但同时造成所需数据量大,实验时间长。
45.实施例:在光路中任选一条光线进行检测
46.为了更清楚得解释本发明的工作原理和技术流程,在光路中任选一条光线进行说明。在本实施例中,光线落点的整像素位移采用xst技术测量,亚像素位移采用xss技术测量,检测实验布局如图6所示,图6左上
①
是本发明中散斑生成器面上光强随扫描步数变化的完整曲线,包含样品信号和参考信号,右上
②
是本发明中探测器上b’处记录的散斑生成器平面上的参考信号,对应待测光学元件不处于光路中的情况,右下
③
是本发明中探测器上a处记录的散斑生成器平面上的样品信号,对应待测光学元件处于光路中的情况。
47.本实施例中,实验部分需精确标定探测器像素位置、扫描散斑生成器采集参考图和扫描散斑生成器采集样品图;具体内容如下:
48.s1、精确标定探测器像素位置:探测器像素之间距离的精度低于位移台的扫描步长精度,因此需使用高精度位移台标定探测器像素之间的距离,将其精度提升到与位移台相同的水平。由于散斑图像的标记特性,由高精度位移台以固定步长在散斑光路中扫描探测器,即可实现对探测器像素之间距离的标定。
49.s2、扫描散斑生成器采集参考图:在待测光学元件退出光路的情况下,以固定步长扫描散斑生成器并采集散斑图像。
50.s3、扫描散斑生成器采集样品图:在待测光学元件进入光路的情况下,以固定步长扫描散斑生成器并采集散斑图像。
51.本实施例中,将检测技术中的数据处理分为四部分,包括探测器像素标定数据的处理、计算整像素位移、计算亚像素位移和恢复波前,具体步骤如下:
52.s1、探测器像素标定数据的处理:标定数据的处理基于数字图像处理技术,可采用互相干算法等手段。利用散斑信号的标记性质和位移台的高精度定位,可计算出探测器面上任意两个像素之间的距离,去除显微系统像差造成的畸变。这一步得到的是任意两个像素中心之间的距离,例如图6中所示的点a和点b’之间的距离。
53.s2、计算整像素位移:如图6所示,当待测元件处于光路中时,采集的图像为样品图,光线如图6中红色实线所示,在探测器的落点为a(指定a点为某一像素中心);当待测元件退出光路时,采集的图像为参考图,光线如图6中红色无箭头虚线所示,在探测器的落点为b(b点不一定位于某一像素中心)。需注意的是,b处的信号与a处一致。利用xst技术所采用的数字图像处理方法(如互相关算法),可根据a点处的信号定位出与a点对应的b点。此处不采用插值算法,因此这一测量的最小单位是探测器像素尺寸,只能定位至距b点最近的像素b’。结合s1的结果,这一步实际得到的是a和b’之间的距离。
54.s3、计算亚像素位移:本实施例中,采用xss技术测量亚像素水平的位移,可达到纳米水平精度。当扫描散斑生成器时,各光线同时在散斑生成器上扫过一段距离,并携带由这部分散斑生成器决定的独特的标记信号。因此,在b和b’点对应的光强-步长曲线(二维扫描情况下为光强-步长曲面)之间进行互相关计算,可得到与bb’对应的散斑生成器平面上的ss’的长度。根据几何关系,bb’/ss’=(l1 l2 l3)/l1,可计算得出b与b’之间距离。由于探测器是由离散的像素组成,因此很可能b点光强信号没有被任何像素准确记录。这一问题可通过a点与b点的关系得到解决。由光路图易得,待测元件处于光路时a所在光线和待测元件不处于光路时b所在光线扫过散斑生成器的同一区域,因此,样品图中a点的信号与参考图中b点的信号完全一致。所以bb’的距离可通过样品图中a像素所记录的信号和参考图中b’所记录的信号之间的互相关计算得到。
55.s4、波前的恢复:综上,通过xst技术可测得距离ab’,通过xss技术可测得距离bb’,二者相加或相减(视b与b’相对方位而定)可得到恢复波前所需的位移ab。由位移ab可计算得到光线传播方向的偏折角度α,对α进行积分可得到波前w。
56.显而易见,本发明综合了xst和xss的优势,检测性能相比二者均有提升。其角度灵敏度可达纳弧度水平,空间分辨力达到探测器像素尺寸水平,这两点远优于xst;角度测量范围达到数十微弧度,其检测时长不再随角度测量范围变化,而只与检测精度(扫描步长)相关,因而降低到两小时内,这两点远优于xss。举例来说,对于曲面面形纳弧度水平的二维检测,扫描步数只需30*30,可在一到两小时间完成检测,远远低于现有xss技术的上千小时。
57.本发明采用位移台标定探测器像素位置,将探测器像素位置精度提高到位移台水平;并且将探测器平面和位移台平面的检测结合起来,同时实现高精度和相对短的检测时长。具体而言,光线落点的整像素位移在探测器平面快速测量,亚像素位移在位移台平面进行精细扫描,实现高精度测量。传统方法中位移台平面的检测通过在同一像素的参考信号与样品信号之间进行互相关实现,现本发明绕开了这一限制,在位移台平面的检测中实现不同像素信号的互相关分析,大大降低检测时长。
58.另外,本发明对实验条件的要求没有提升。只需在xss技术的硬件基础上,调整实验流程,改进数据处理方法,即可实现本发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。