1.本发明涉及用于辅助卫星定位的定位辅助设备和定位辅助方法,尤其涉及其上记录了用于实现所述设备和方法的程序的计算机可读记录介质。
背景技术:
2.为了准确进行卫星定位,需要考虑诸如(1)卫星轨道误差;(2)卫星时钟误差;(3)电离层延迟;(4)对流层延迟;(5)信号屏蔽和(6)多路径之类的误差因素。
3.有鉴于此,已经提出诸如ppp(精确点定位)这样的技术。但是,如果只使用从卫星接收的信息,难以进行准确的卫星定位。
4.近年来,为了进一步提高卫星定位的准确性,已经提出诸如madoca(multi-gnss(全球导航卫星系统)轨道和时钟分析高级演示工具)-ppp这样的技术。
5.具体而言,通过使用madoca校正信息来减少(1)卫星轨道误差和(2)卫星时钟误差。通过使用局部校正信息来减少(3)电离层延迟误差和(4)对流层延迟误差。通过使用高仰角卫星(准天顶卫星等)发送的无线电波来减少(5)信号屏蔽和(6)多路径误差。
6.作为现有技术,专利文献1公开了一种用于提高卫星定位准确性的定位设备。通过专利文献1的定位设备,使用通过卫星信道和地面信道获得的校正信息(全局校正信息和局部校正信息)以及基于从卫星发送的定位信号生成的观测数据来执行定位运算处理。此外,当新获得的校正信息的内容与预先存储的校正信息的内容(目标卫星或信息类型)重叠时,专利文献1的定位设备计算其可靠性,并选择可靠性更高的信息。
7.现有技术文献列表
8.专利文献
9.专利文献1:日本专利公开no.2018-205244
技术实现要素:
10.技术问题
11.然而,专利文献1中公开的定位设备除了已经保持局部校正信息的时间(信息的新鲜度)之外,还使用本地生成站与定位设备之间的距离或其中将本地生成站的定位结果用作总体的标准偏差来计算可靠性,并且根据所计算的可靠性来更新局部校正信息,但是未提高电离层延迟量或对流层延迟量的准确性。
12.本发明的示例性目的是提供用于提高定位准确性的定位辅助设备、定位辅助方法以及计算机可读记录介质。
13.问题解决方案
14.为了实现上述目的,根据示例方面的定位辅助设备是一种定位辅助设备,所述定位辅助设备被设置在生成局部校正信息的生成侧设备中,所述定位辅助设备包括:
15.第一估计单元,所述第一估计单元使用通过机器学习生成的电离层延迟模型来估计电离层延迟量;以及
16.第一精确度计算单元,所述第一精确度计算单元使用估计的电离层延迟量,计算相对于通过定位运算所计算的电离层延迟量的第一精确度。
17.此外,为了实现上述目的,根据示例方面的定位辅助设备是一种定位辅助设备,所述定位辅助设备被设置在使用局部校正信息的使用侧设备中,所述定位辅助设备包括:
18.第一延迟准确性计算单元,所述第一延迟准确性计算单元基于使用电离层延迟量所计算的第一精确度以及使用通过机器学习生成的电离层延迟模型估计的电离层延迟量,计算通过定位运算所计算的电离层延迟量的准确性。
19.此外,为了实现上述目的,根据示例方面的定位辅助方法是一种用于生成局部校正信息的生成侧设备的定位辅助方法,所述方法包括:
20.使用通过机器学习生成的电离层延迟模型来估计电离层延迟量的第一估计步骤;以及
21.使用估计的电离层延迟量,计算相对于通过定位运算所计算的电离层延迟量的第一精确度的第一精确度计算步骤。
22.此外,为了实现上述目的,根据示例方面的定位辅助方法是一种用于使用局部校正信息的使用侧设备的定位辅助方法,所述方法包括:
23.基于使用电离层延迟量所计算的第一精确度以及使用通过机器学习生成的电离层延迟模型估计的电离层延迟量,计算通过定位运算所计算的电离层延迟量的准确性的第一延迟准确性计算步骤。
24.此外,为了实现上述目的,根据示例方面的计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得生成局部校正信息的生成侧设备的计算机执行:
25.使用通过机器学习生成的电离层延迟模型来估计电离层延迟量的第一估计步骤;以及
26.使用估计的电离层延迟量,计算相对于通过定位运算所计算的电离层延迟量的第一精确度的第一精确度计算步骤。
27.此外,为了实现上述目的,根据示例方面的计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得使用局部校正信息的使用侧设备的计算机执行:
28.基于使用电离层延迟量所计算的第一精确度以及使用通过机器学习生成的电离层延迟模型估计的电离层延迟量,计算通过定位运算所计算的电离层延迟量的准确性的第一延迟准确性计算步骤。
29.本发明的有益效果
30.如上所述,根据本发明,可以提高定位准确性。
附图说明
31.图1是用于描述定位辅助设备的示例的示意图。
32.图2是用于描述包括定位辅助设备的系统的示例的示意图。
33.图3是用于描述生成侧设备的定位辅助设备的操作示例的示意图。
34.图4是用于描述使用侧设备的定位辅助设备的操作示例的示意图。
35.图5是用于描述包括定位辅助设备的系统的示例的示意图。
36.图6是用于描述生成侧设备的定位辅助设备的操作示例的示意图。
37.图7是用于描述使用侧设备的定位辅助设备的操作示例的示意图。
38.图8是用于描述实现定位辅助设备的计算机的示例的示意图。
具体实施方式
39.(第一示例性实施例)
40.下面参照图1至图4描述第一示例性实施例。
41.[设备配置]
[0042]
首先,参照图1描述根据第一示例性实施例的定位辅助设备1的配置。图1是用于描述定位辅助设备的示例的示意图。
[0043]
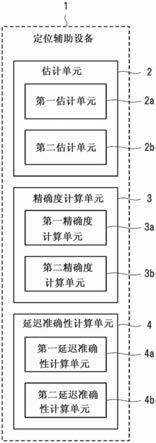
图1所示定位辅助设备是用于提高定位准确性的设备。此外,如图1所示,定位辅助设备包括估计单元2、精确度计算单元3和延迟准确性计算单元4。
[0044]
其中,估计单元2包括第一估计单元2a,其使用指示通过机器学习生成的电离层延迟量的电离层延迟模型来估计电离层延迟量。此外,估计单元2包括第二估计单元2b,其使用指示通过机器学习生成的对流层延迟量的对流层延迟模型来估计对流层延迟量。
[0045]
例如,电离层延迟模型是一种用于执行机器学习的模型,其使用在过去定位中收集的数据作为输入,并且输出电离层延迟量。此外,对流层延迟模型是一种用于执行机器学习的模型,例如,其使用在过去定位中收集的数据作为输入,并且输出对流层延迟量。机器学习的示例包括使用回归分析的学习、深度学习等。
[0046]
精确度计算单元3包括第一精确度计算单元3a,其使用估计的电离层延迟量来计算相对于通过定位运算所计算的电离层延迟量的第一精确度。此外,准确性计算单元3包括第二精确度计算单元3b,其使用估计的对流层延迟量来计算相对于通过定位运算所计算的对流层延迟量的第二精确度。
[0047]
例如,通过获得估计的电离层延迟量b1与通过定位运算所计算的电离层延迟量a1之间的差,并且将差的绝对值除以估计的电离层延迟量b1所获得的值可以视为第一精确度。此外,例如,通过获得估计的对流层延迟量b2与通过定位运算所计算的对流层延迟量a2之间的差,并且将差的绝对值除以估计的对流层延迟量b2所获得的值可以视为第二精确度。
[0048]
延迟准确性计算单元4包括第一延迟准确性计算单元4a,其使用第一精确度来计算电离层延迟量的准确性。此外,延迟准确性计算单元4包括第二延迟准确性计算单元4b,其使用第二精确度来计算对流层延迟量的准确性。
[0049]
例如,电离层延迟量的准确性可以是使用电离层延迟量的标准偏差和第一精确度来指示的值。此外,例如,对流层延迟量的准确性可以是使用对流层延迟量的标准偏差和第二精确度来指示的值。
[0050]
通过这种方式,在第一示例性实施例中,通过分别使用估计的电离层延迟量和估计的对流层延迟量来计算在定位运算时所计算的电离层延迟量和对流层延迟量的准确性的准确程度,可以进一步提高电离层延迟量和对流层延迟量的准确性。因此,可以提高定位准确性。
[0051]
[系统配置]
[0052]
下面,参照图2更详细地描述根据第一示例性实施例的定位辅助设备1的配置。图2
是用于描述包括定位辅助设备的系统的示例的示意图。
[0053]
如图2所示,根据第一示例性实施例的系统包括生成侧设备10(生成站)和使用侧设备20。此外,生成侧设备10和使用侧设备20从定位卫星30接收无线电波。
[0054]
生成侧设备10包括估计单元2(第一估计单元2a和第二估计单元2b)、精确度计算单元3(第一精确度计算单元3a和第二精确度计算单元3b)、延迟准确性计算单元4(第一延迟准确性计算单元4a和第二延迟准确性计算单元4b)、定位信号接收单元11、定位单元12、局部校正信息生成单元13、定位误差计算单元14和通信单元15。此外,使用侧设备20包括定位信号接收单元21、通信单元22、定位单元23和控制单元24。
[0055]
下面描述系统。
[0056]
系统的示例包括卫星定位系统等。例如,可以将gnss(全球导航卫星系统)视为卫星定位系统。具体而言,在卫星定位系统中,生成侧设备10和使用侧设备20基于从图2所示的多个定位卫星30发射的定位信号来计算其当前位置。
[0057]
生成侧设备10从定位卫星30接收定位信号,并生成在服务区中有效的局部校正信息。然后,生成侧设备10将生成的局部校正信息发送到使用侧设备20。例如,生成侧设备10安装在地面上。
[0058]
服务区域例如是基于安装生成侧设备10的位置来设置的地区。
[0059]
使用侧设备20从定位卫星30接收定位信号,将接收到的定位信号解调,并且生成观测数据。此外,使用侧设备20从生成侧设备10接收局部校正信息。然后,使用侧设备20基于生成的观测数据和在服务区域中有效的局部校正信息来计算其当前位置。此外,使用侧设备20将指示所计算的当前位置的信息提供给各种应用。
[0060]
使用侧设备20安装在移动对象等中。移动对象的示例包括车辆、飞行器、船只、移动设备等。可以将导航系统、自动驾驶系统等视为应用。
[0061]
每个定位卫星30在预定轨道周期内在预定卫星轨道上旋转。定位卫星30发送通过相位调制指示传输时间等的数据而获得的定位信号。
[0062]
下面描述生成局部校正信息的生成侧设备10。
[0063]
定位信号接收单元11经由监视设备(其设置在生成侧设备10附近用于监视来自定位卫星30的无线电波)接收从定位卫星30发送的定位信号,将接收到的定位信号解调,并且生成观测数据。具体而言,定位信号接收单元11包括接收定位信号的天线、解调定位信号的电路等。
[0064]
可以将诸如用于识别定位卫星的识别信息、接收用于生成观测数据的定位信号的观测时间、指示多普勒效应引起的载波频率与接收频率之间的差的多普勒频移量、指示定位卫星30的卫星轨道上的当前位置的卫星坐标、指示定位信号从每个定位卫星30发送的时间与定位信号接收单元11接收定位信号的时间之间的差的伪距离、以及载波相位这样的数据视为观测数据。
[0065]
定位单元12使用观测数据来计算生成侧设备10的位置坐标。可以将ppp-ar、madoca-ppp等用作定位方法。
[0066]
局部校正信息生成单元13基于观测数据生成每个定位卫星30的局部校正信息,并且将生成的局部校正信息存储在局部校正信息生成单元13(图2中未示出)中设置的存储单元。注意,关于存储单元,可以将信息存储在诸如设置在生成侧设备10内部或外部的数据库
这样的存储设备中。
[0067]
将诸如用于识别卫星的标识号、生成局部校正信息的生成时间、生成侧设备10的位置坐标、指示在特定时间段内位置坐标变化的位置坐标偏差、电离层校正信息(诸如电离层延迟量a1或电离层延迟量的标准偏差这样的信息)和对流层校正信息(诸如对流层延迟量a2或对流层延迟量的标准偏差这样的信息)这样的信息存储为局部校正信息。
[0068]
定位误差计算单元14使用指示生成侧设备10位置的位置坐标(基准位置)以及基于从卫星接收的定位信号估计的生成侧设备10的位置坐标(估计位置)来计算定位误差。基准位置是指预先测量的生成侧设备10的位置坐标。
[0069]
定位误差计算单元14例如计算三维空间中两个点之间(基准位置与估计位置之间)的距离,并且将该距离视为定位误差。
[0070]
第一估计单元2a将以预设间隔获得的多条数据应用于电离层延迟模型,并且估计电离层延迟量b1。具体而言,第一估计单元2a首先以预设间隔实时获得诸如日期和时间dt、温度t、湿度h和定位误差l这样的数据。
[0071]
随后,第一估计单元2a将获得的数据应用于电离层延迟模型,并且输出估计的电离层延迟量b1。可以将诸如公式1所示的关系式视为电离层延迟模型。注意,对公式1没有限制。
[0072]
[公式1]
[0073]
b1=a1
×
l a2
×
dt a3
×
t a4
×
h
……
b
[0074]
b1:使用电离层延迟模型估计的电离层延迟量
[0075]
a1:与定位误差对应的系数
[0076]
l:由定位误差计算单元14计算的定位误差
[0077]
a2:与日期和时间对应的系数
[0078]
dt:进行定位的日期和时间
[0079]
a3:与温度对应的系数
[0080]
t:经由通信单元15从外部获得的温度
[0081]
a4:与湿度对应的系数
[0082]
h:经由通信单元15从外部获得的湿度
[0083]
b:截距
[0084]
第二估计单元2b将以预设间隔获得的多条数据应用于对流层延迟模型,并且估计对流层延迟量b2。具体而言,第二估计单元2b首先以预设间隔实时获得诸如日期和时间dt、温度t、湿度h和定位误差l这样的数据。
[0085]
随后,第二估计单元2b将获得的数据应用于对流层延迟模型,并且输出估计的对流层延迟量b2。可以将诸如公式2所示的关系式视为对流层延迟模型。注意,对公式2没有限制。
[0086]
(公式2)
[0087]
b2=c1
×
l c2
×
dt c3
×
t c4
×
h
……
d
[0088]
b2:使用对流层延迟模型估计的对流层延迟量
[0089]
c1:与定位误差对应的系数
[0090]
l:由定位误差计算单元14计算的定位误差
[0091]
c2:与日期和时间对应的系数
[0092]
dt:进行定位的日期和时间
[0093]
c3:与温度对应的系数
[0094]
t:经由通信单元15从外部获得的温度
[0095]
c4:与湿度对应的系数
[0096]
h:经由通信单元15从外部获得的湿度
[0097]
d:截距
[0098]
第一精确度计算单元3a使用估计的电离层延迟量b1和电离层延迟量a1来计算相对于通过定位运算所计算的电离层延迟量a1的第一精确度。具体而言,精确度计算单元3a计算公式3所示的第一精确度。注意,对公式3没有限制。
[0099]
(公式3)
[0100]
re1=|b1-a1|/b1
[0101]
re1:相对于局部校正信息的电离层延迟量a1的精确度(第一精确度)
[0102]
第二准确性计算单元3b使用估计的对流层延迟量b2和对流层延迟量a2来计算相对于通过定位运算所计算的对流层延迟量a2的第二精确度。具体而言,精确度计算单元3b计算公式4所示的第二精确度。注意,对公式4没有限制。
[0103]
(公式4)
[0104]
re2=|b2-a2|/b2
[0105]
re1:相对于局部校正信息的电离层延迟量a2的精确度(第二精确度)
[0106]
第一延迟准确性计算单元4a使用第一精确度来计算电离层延迟量的准确性。具体而言,第一延迟准确性计算单元4a使用电离层延迟量的标准偏差和第一精确度来计算电离层延迟量的准确性。例如,可以设想,将电离层延迟量的准确性按照公式5所示进行计算。
[0107]
(公式5)
[0108]
ac1=sd1
×
re1
[0109]
ac1:电离层延迟量的准确性
[0110]
sd1:电离层延迟量的标准偏差
[0111]
re1:第一精确度
[0112]
第二延迟准确性计算单元4b使用第二精确度来计算对流层延迟量的准确性。具体而言,延迟准确性计算单元4a使用对流层延迟量的标准偏差和第二精确度来计算对流层延迟量的准确性。例如,可以设想,将对流层延迟量的准确性按照公式6所示进行计算。
[0113]
(方程式6)
[0114]
ac2=sd2
×
re2
[0115]
ac2:对流层延迟量的准确性
[0116]
sd2:对流层延迟量的标准偏差
[0117]
re2:第二精确度
[0118]
注意,将使用三个示例来描述电离层延迟量和对流层延迟量的上述准确性。在(1)中,当标准偏差为0.28并且精确度为0.22时,准确性为0.062。在(2)中,当标准偏差为2.50并且精确度为0.30时,准确性为0.750。在(3)中,当标准偏差为0.77并且精确度为1.20时,准确性为0.924。
[0119]
在(1)的情况下,可以看出,标准偏差和精确度这两者都取较小的值,因此延迟量的准确性高。但是,在(2)(3)的情况下,标准偏差和精确度的其中一个是较大的值,因此可以看出,准确性不高。通过结合标准偏差和精确度,而不是像通常那样仅使用标准偏差,可以更详细地计算延迟量的准确性。
[0120]
通信单元15向使用侧设备20的通信单元22发送局部校正信息、电离层延迟量的准确性和对流层延迟量的准确性。具体而言,通信单元15是进行诸如有线通信或无线通信之类的通信设备。
[0121]
下面描述使用局部校正信息的使用侧设备20。
[0122]
定位信号接收单元21接收从定位卫星30发送的定位信号,将接收到的定位信号解调,并且生成观测数据。具体而言,定位信号接收单元21包括接收定位信号的天线、解调定位信号的电路等。
[0123]
通信单元22从生成侧设备10的通信单元15接收局部校正信息、电离层延迟量的准确性和对流层延迟量的准确性。具体而言,通信单元22是进行诸如有线通信或无线通信之类的通信设备。
[0124]
定位单元23使用观测数据、局部校正信息、电离层延迟量的准确性和对流层延迟量的准确性来计算使用侧设备20的位置坐标。可以将ppp-ar、madoca-ppp等用作定位方法。
[0125]
控制单元24使用通过使用侧设备20计算的位置坐标来控制安装有使用侧设备20的设备(例如,车辆、飞行器、船只或移动设备)或安装在使用侧设备20中的应用(例如,导航系统)。具体而言,控制单元24是包括处理器等的电路。
[0126]
[设备操作]
[0127]
下面,参照附图描述根据第一示例性实施例的定位辅助设备的操作。图3是用于描述生成侧设备的定位辅助设备的操作示例的示意图。图4是用于描述使用侧设备的定位辅助设备的操作示例的示意图。在以下描述中,将视情况参照图2。此外,在第一示例性实施例中,通过操作定位辅助设备来执行定位辅助方法。因此,将根据第一示例性实施例的定位辅助方法的描述替换为以下对定位辅助设备的操作的描述。
[0128]
下面参照图3描述生成侧设备的操作。
[0129]
首先,定位信号接收单元11经由监视设备(其设置在生成侧设备10附近用于监视来自定位卫星30的无线电波)接收从定位卫星30发送的定位信号,将接收到的定位信号解调,并且生成观测数据(步骤a1)。
[0130]
随后,定位单元12使用观测数据来计算生成侧设备10的位置坐标(步骤a2)。然后,局部校正信息生成单元13基于观测数据来生成每个定位卫星30的局部校正信息,并且将生成的局部校正信息存储在存储单元中(步骤a3)。
[0131]
随后,定位误差计算单元14使用指示生成侧设备10的精确位置的位置坐标(基准位置)以及基于从卫星接收的定位信号估计的生成侧设备10的位置坐标(估计位置)来计算定位误差(步骤a4)。例如,定位误差计算单元14计算三维空间中两个点之间(基准位置与估计位置之间)的距离,并且将该距离视为定位误差。
[0132]
随后,第一估计单元2a将以预设间隔获得的多条数据应用于电离层延迟模型,并且估计电离层延迟量b1(步骤a5)。此外,第二估计单元2b将以预设间隔获得的多条数据应用于对流层延迟模型,并且估计对流层延迟量b2(步骤a5)。
[0133]
具体而言,在步骤a5中,第一估计单元2a首先以预设间隔实时获得诸如日期和时间dt、温度t、湿度h和定位误差l这样的数据。然后,第一估计单元2a将获得的数据应用于电离层延迟模型,并且输出估计的电离层延迟量b1。可以设想,诸如公式1所示的关系式作为电离层延迟模型。
[0134]
此外,具体而言,在步骤a5中,第二估计单元2b首先以预设间隔实时获得诸如日期和时间dt、温度t、湿度h和定位误差l这样的数据。然后,第二估计单元2b将获得的数据应用于对流层延迟模型,并且输出估计的对流层延迟量b2。可以设想,诸如公式2所示的关系式作为对流层延迟模型。
[0135]
随后,第一精确度计算单元3a使用估计的电离层延迟量b1和电离层延迟量a1,计算相对于通过定位运算所计算的电离层延迟量a1的第一精确度(步骤a6)。此外,第二精确度计算单元3b使用估计的对流层延迟量b2和对流层延迟量a2,计算相对于通过定位运算所计算的对流层延迟量a2的第二精确度(步骤a6)。
[0136]
具体而言,在步骤a6中,可以设想,第一精确度计算单元3a计算公式3所示的第一精确度。此外,在步骤a6中,可以设想,第二精确度计算单元3b计算公式4所示的第二精确度。
[0137]
第一延迟准确性计算单元4a使用第一精确度来计算电离层延迟量的准确性。具体而言,第一延迟准确性计算单元4a使用电离层延迟量的标准偏差和第一精确度来计算电离层延迟量的准确性(步骤a7)。例如,可以设想,按照公式5所示来计算电离层延迟量的准确性。
[0138]
此外,第二延迟准确性计算单元4b使用第二精确度来计算对流层延迟量的准确性。具体而言,第二延迟准确性计算单元4b使用对流层延迟量的标准偏差和第二精确度来计算对流层延迟量的准确性(步骤a7)。例如,可以设想,按照公式6所示来计算对流层延迟量的准确性。
[0139]
通信单元15将局部校正信息、电离层延迟量的准确性和对流层延迟量的准确性发送到使用侧设备20的通信单元22(步骤a8)。
[0140]
下面参照图4描述使用侧设备的操作。
[0141]
首先,定位信号接收单元21接收从定位卫星30发送的定位信号,将接收到的定位信号解调,并且生成观测数据(步骤b1)。
[0142]
随后,定位单元23经由通信单元22接收来自生成侧设备10的局部校正信息、电离层延迟量的准确性和对流层延迟量的准确性(步骤b2)。
[0143]
定位单元23使用观测数据、局部校正信息、电离层延迟量的准确性和对流层延迟量的准确性来计算使用侧设备20的位置坐标(步骤b3)。
[0144]
随后,控制单元24使用通过使用侧设备20计算的位置坐标来控制安装有使用侧设备20的设备(例如,车辆、飞行器、船只或移动设备)或安装在使用侧设备20中的应用(例如,导航系统)。
[0145]
[示例性实施例中的效果]
[0146]
如上所述,根据第一示例性实施例,通过使用估计的电离层延迟量或对流层延迟量来计算在定位运算时所计算的电离层延迟量或对流层延迟量的准确性的精确程度,可以进一步提高电离层延迟量或对流层延迟量的准确性。因此,可以提高定位准确性。
[0147]
[程序]
[0148]
根据第一示例性实施例的程序可以是用于使得生成侧计算机执行图3所示步骤a1至a8的程序。此外,根据第一示例性实施例的程序可以是用于使得用户侧计算机执行图4所示步骤b1到b3的程序。
[0149]
通过将这些程序安装到相应的计算机上并执行这些程序,可以实现根据第一示例性实施例的生成侧或使用侧定位辅助设备和定位辅助方法。在这种情况下,生成侧计算机的处理器充当定位单元12、局部校正信息生成单元13、定位误差计算单元14、第一估计单元2a、第二估计单元2b、第一精确度计算单元3a、第二精确度计算单元3b、第一延迟准确性计算单元4a和第二延迟准确性计算单元4b,并且进行处理。此外,用户侧计算机的处理器充当定位单元23和控制单元24,并且进行处理。
[0150]
此外,根据第一示例性实施例的程序也可通过多个计算机构成的计算机系统执行。例如,每个生成侧计算机可以充当定位单元12、局部校正信息生成单元13、定位误差计算单元14、第一估计单元2a、第二估计单元2b、第一精确度计算单元3a、第二精确度计算单元3b、第一延迟准确性计算单元4a和第二延迟准确性计算单元4b中的一个。例如,每个使用侧计算机可以充当定位单元23和控制单元24中的一个。
[0151]
(第二示例性实施例)
[0152]
下面参照图5至图7描述第二示例性实施例。
[0153]
[系统配置]
[0154]
下面参照图5更详细地描述根据第二示例性实施例的定位辅助设备的配置。图5是用于描述包括定位辅助设备的系统的示例的示意图。
[0155]
如图5所示,根据第二示例性实施例的系统包括生成侧设备10(生成站)和使用侧设备20。生成侧设备10包括估计单元2(第一估计单元2a和第二估计单元2b)、精确度计算单元3(第一精确度计算单元3a和第二精确度计算单元3b)、定位信号接收单元11、定位单元12,局部校正信息生成单元13、定位误差计算单元14和通信单元15。此外,使用侧设备20包括定位信号接收单元21、通信单元22、定位单元23、延迟准确性计算单元4(第一延迟准确性计算单元4a和第二延迟准确性计算单元4b)和控制单元24。
[0156]
下面描述生成局部校正信息的生成侧设备10。
[0157]
根据第二示例性实施例的定位信号接收单元11、定位单元12、局部校正信息生成单元13、定位误差计算单元14、估计单元2(第一估计单元2a和第二估计单元2b)、以及精确度计算单元3(第一精确度计算单元3a和第二精确度计算单元3b)的操作与第一示例性实施例的操作相同,因此省略其描述。
[0158]
通信单元15将局部校正信息、第一精确度和第二精确度发送到使用侧设备20的通信单元22。
[0159]
下面描述使用局部校正信息的使用侧设备20。
[0160]
根据第二示例性实施例的定位信号接收单元21、定位单元23和控制单元24的操作与第一示例性实施例的操作相同,因此省略定位信号接收单元21、定位单元23和控制单元24的描述。
[0161]
通信单元22从生成侧设备10的通信单元15接收局部校正信息、第一精确度和第二精确度。
[0162]
延迟准确性计算单元4a使用第一精确度来计算电离层延迟量的准确性。具体而言,延迟准确性计算单元4a使用电离层延迟量的标准偏差和第一精确度来计算电离层延迟量的准确性。例如,可以设想,将电离层延迟量的准确性按照公式5所示进行计算。
[0163]
第二延迟准确性计算单元4b使用第二精确度来计算对流层延迟量的准确性。具体而言,第二延迟准确性计算单元4b使用对流层延迟量的标准偏差和第二精确度来计算对流层延迟量的准确性。例如,可以设想,将对流层延迟量的准确性按照公式6所示进行计算。
[0164]
[设备配置]
[0165]
下面,参照附图描述根据第二示例性实施例的定位辅助设备的操作。图6是用于描述生成侧设备的定位辅助设备的操作示例的示意图。图7是用于描述使用侧设备的定位辅助设备的操作示例的示意图。在以下描述中,将视情况参照5。此外,在第二示例性实施例中,通过操作定位辅助设备来执行定位辅助方法。因此,将根据第二示例性实施例的定位辅助方法的描述替换为以下对定位辅助设备的操作的描述。
[0166]
下面参照图6描述生成侧设备的操作。
[0167]
首先,生成侧设备10执行步骤a1至a6和c1中的处理。在第一示例性实施例中已经描述图6所示步骤a1到a6,并省略其描述。
[0168]
通信单元15将局部校正信息、第一精确度和第二精确度发送到使用侧设备20的通信单元22(步骤c1)。
[0169]
下面参照图7描述使用侧设备的操作。
[0170]
首先,定位信号接收单元21接收从定位卫星30发送的定位信号,将接收的定位信号解调,并且生成观测数据(步骤b1)。
[0171]
通信单元22从生成侧设备10的通信单元15接收局部校正信息、第一精确度和第二精确度(步骤d1)。
[0172]
随后,延迟准确性计算单元4a使用第一精确度来计算电离层延迟量的准确性(步骤d2)。此外,第二延迟准确性计算单元4b使用第二精确度来计算对流层延迟量的准确性(步骤d2)。
[0173]
具体而言,在步骤d2中,第一延迟准确性计算单元4a使用电离层延迟量的标准偏差和第一精确度来计算电离层延迟量的准确性。例如,可以设想,将电离层延迟量的准确性按照公式5所示进行计算。此外,在步骤d2中,第二延迟准确性计算单元4b使用对流层延迟量的标准偏差和第二精确度来计算对流层延迟量的准确性。例如,可以设想,将对流层延迟量的准确性按照公式6所示进行计算。然后,定位单元23使用观测数据、局部校正信息、电离层延迟量的准确性和对流层延迟量的准确性来计算使用侧设备20的位置坐标(步骤b3)。
[0174]
[第二示例性实施例中的效果]
[0175]
如上所述,根据第二示例性实施例,通过使用估计的电离层延迟量和估计的对流层延迟量,分别计算电离层延迟量和对流层延迟量的准确性的准确程度,可以进一步提高在定位运算时所计算的电离层延迟量和对流层延迟量的准确性。因此,可以提高定位准确性。
[0176]
[程序]
[0177]
根据第二示例性实施例的程序可以是用于使得生成侧计算机执行图6所示步骤a1至a6和c1的程序。此外,根据第二示例性实施例的程序可以是用于使得用户侧计算机执行
图7所示步骤b1、d1、d2和b3的程序。
[0178]
通过将这些程序安装到相应的计算机上并且执行这些程序,可以实现根据第二示例性实施例的生成侧或使用侧定位辅助设备和定位辅助方法。在这种情况下,生成侧计算机的处理器充当定位单元12、局部校正信息生成单元13、定位误差计算单元14、第一估计单元2a、第二估计单元2b、第一精确度计算单元3a和第二精确度计算单元3b,并且进行处理。
[0179]
此外,用户侧计算机的处理器充当第一延迟准确性计算单元4a、第二延迟准确性计算单元4b、定位单元23和控制单元24,并且进行处理。
[0180]
此外,根据第二示例性实施例的程序也可以通过多个计算机构成的计算机系统执行。在这种情况下,例如,每个生成侧计算机可以充当定位单元12、局部校正信息生成单元13、定位误差计算单元14、第一估计单元2a、第二估计单元2b、第一精确度计算单元3a和第二准确性计算单元3b中的一个。例如,每个使用侧计算机可以充当第一延迟准确性计算单元4a、第二延迟准确性计算单元4b、定位单元23和控制单元24中的一个。
[0181]
[物理配置]
[0182]
在此,参照图8描述通过执行根据第一或第二示例性实施例的生成侧程序或使用侧程序来实现定位辅助设备的计算机。图8是用于描述实现根据第一或第二示例性实施例的定位辅助设备的计算机的示例的示意图。
[0183]
如图8所示,计算机110包括cpu(中央处理单元)111、主存储器112、存储设备113、输入接口114、显示控制器115、数据读写器116和通信接口117。这些单元经由总线121连接,从而能够相互进行数据通信。注意,除了cpu 111之外或者作为cpu 111的替代,计算机110还可包括gpu(图形处理单元)或fpga(现场可编程门阵列)。
[0184]
cpu 111将存储在存储设备113中的根据本示例性实施例的程序(代码)加载到主存储器112,并且按照预定顺序执行它们以进行各种计算。主存储器112通常是诸如dram(动态随机存取存储器)的易失性存储设备。此外,在存储在计算机可读记录介质120中的状态下提供根据本示例性实施例的程序。注意,可以将根据本示例性实施例的程序分布在经由通信接口117连接的互联网上。
[0185]
存储设备113的具体示例包括硬盘驱动器和半导体存储设备,诸如闪存。输入接口114介导cpu 111与诸如键盘或鼠标的输入设备118之间的数据传输。显示控制器115连接到显示设备119,并且控制显示设备119的显示。
[0186]
数据读取器/写入器116介导cpu 111与记录介质120之间的数据传输,从记录介质120读取程序,并且将在计算机110中进行的处理结果写入记录介质120。通信接口117介导cpu 111与另一个计算机之间的数据传输。
[0187]
记录介质120的具体示例包括通用半导体存储设备,诸如cf(compact flash(注册商标))和sd(secure digital)、磁记录介质,例如软磁盘,以及光学记录介质,例如cd-rom(光盘只读存储器)。
[0188]
附记
[0189]
关于上述示例性实施例还公开了以下附记。上述示例性实施例中的其中一个或全部可以表示为但不限于以下所述的附记1至附记18。
[0190]
(附记1)
[0191]
一种定位辅助设备,所述定位辅助设备被设置在生成局部校正信息的生成侧设备
中,所述定位辅助设备包括:
[0192]
第一估计单元,所述第一估计单元用于使用通过机器学习生成的电离层延迟模型来估计电离层延迟量;以及
[0193]
第一精确度计算单元,所述第一精确度计算单元用于使用估计的电离层延迟量来计算相对于通过定位运算所计算的电离层延迟量的第一精确度。
[0194]
(附记2)
[0195]
根据附记1所述的定位辅助设备,进一步包括:
[0196]
第二估计单元,所述第二估计单元用于使用通过机器学习生成的对流层延迟模型来估计对流层延迟量;以及
[0197]
第二精确度计算单元,所述第二精确度计算单元用于使用估计的对流层延迟量来计算相对于通过定位运算所计算的对流层延迟量的第二精确度。
[0198]
(附记3)
[0199]
根据附记1所述的定位辅助设备,进一步包括:
[0200]
第一延迟准确性计算单元,所述第一延迟准确性计算单元用于使用所述第一精确度来计算所述电离层延迟量的准确性。
[0201]
(附记4)
[0202]
根据附记2所述的定位辅助设备,进一步包括:
[0203]
第二延迟准确性计算单元,所述第二延迟准确性计算单元用于使用所述第二精确度来计算所述对流层延迟量的准确性。
[0204]
(附记5)
[0205]
一种定位辅助设备,所述定位辅助设备被设置在使用局部校正信息的使用侧设备中,所述定位辅助设备包括:
[0206]
第一延迟准确性计算单元,所述第一延迟准确性计算单元用于基于使用电离层延迟量所计算的第一精确度以及使用通过机器学习生成的电离层延迟模型来估计的电离层延迟量,计算通过定位运算所计算的电离层延迟量的准确性。
[0207]
(附记6)
[0208]
根据附记5所述的定位辅助设备,进一步包括:
[0209]
第二延迟准确性计算单元,所述第二延迟准确性计算单元用于基于使用对流层延迟量所计算的第二精确度以及使用通过机器学习生成的对流层延迟模型估计的对流层延迟量,计算通过定位运算所计算的对流层延迟量的准确性。
[0210]
(附记7)
[0211]
一种用于生成侧设备的定位辅助方法,所述生成侧设备生成局部校正信息,所述方法包括:
[0212]
使用通过机器学习生成的电离层延迟模型来估计电离层延迟量的第一估计步骤;以及
[0213]
使用估计的电离层延迟量,计算相对于通过定位运算所计算的电离层延迟量的第一精确度的第一精确度计算步骤。
[0214]
(附记8)
[0215]
根据附记7所述的定位辅助方法,进一步包括:
[0216]
使用通过机器学习生成的对流层延迟模型来估计对流层延迟量的第二估计步骤;以及
[0217]
使用估计的对流层延迟量,计算相对于通过定位运算所计算的对流层延迟量的第二精确度的第二精确度计算步骤。
[0218]
(附记9)
[0219]
根据附记7所述的定位辅助方法,进一步包括:
[0220]
使用所述第一精确度来计算所述电离层延迟量的准确性的第一延迟准确性计算步骤。
[0221]
(附记10)
[0222]
根据附记8所述的定位辅助方法,进一步包括:
[0223]
使用所述第二精确度来计算所述对流层延迟量的准确性的第二延迟准确性计算步骤。
[0224]
(附记11)
[0225]
一种用于使用局部校正信息的使用侧设备的定位辅助方法,所述方法包括:
[0226]
基于使用电离层延迟量所计算的第一精确度以及使用通过机器学习生成的电离层延迟模型估计的电离层延迟量,计算通过定位运算所计算的电离层延迟量的准确性的第一延迟准确性计算步骤。
[0227]
(附记12)
[0228]
根据附记11所述的定位辅助方法,进一步包括:
[0229]
基于使用对流层延迟量所计算的第二精确度以及使用通过机器学习生成的对流层延迟模型估计的对流层延迟量,计算通过定位运算所计算的对流层延迟量的准确性的第二延迟准确性计算步骤。
[0230]
(附记13)
[0231]
一种计算机可读记录介质,所述计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得生成局部校正信息的生成侧设备的计算机执行:
[0232]
使用通过机器学习生成的电离层延迟模型来估计电离层延迟量的第一估计步骤;以及
[0233]
使用估计的电离层延迟量,计算相对于通过定位运算所计算的电离层延迟量的第一精确度的第一精确度计算步骤。
[0234]
(附记14)
[0235]
根据附记13的计算机可读记录介质,所述计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得计算机执行:
[0236]
使用通过机器学习生成的对流层延迟模型来估计对流层延迟量的第二估计步骤;以及
[0237]
使用估计的对流层延迟量,计算相对于通过定位运算所计算的对流层延迟量的第二精确度的第二精确度计算步骤。
[0238]
(附记15)
[0239]
根据附记13的计算机可读记录介质,所述计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得计算机执行:
[0240]
使用所述第一精确度来计算所述电离层延迟量的准确性的第一延迟准确性计算步骤。
[0241]
(附记16)
[0242]
根据附记14的计算机可读记录介质,所述计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得计算机执行:
[0243]
使用所述第二精确度来计算所述对流层延迟量的准确性的第二延迟准确性计算步骤。
[0244]
(附记17)
[0245]
一种计算机可读记录介质,所述计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得使用局部校正信息的使用侧设备的计算机执行:
[0246]
基于使用电离层延迟量所计算的第一精确度以及使用通过机器学习生成的电离层延迟模型估计的电离层延迟量,计算通过定位运算所计算的电离层延迟量的准确性的第一延迟准确性计算步骤。
[0247]
(附记18)
[0248]
根据附记17的计算机可读记录介质,所述计算机可读记录介质包括记录在其上的程序,所述程序包括指令,所述指令使得计算机执行:
[0249]
基于使用对流层延迟量所计算的第二精确度以及使用通过机器学习生成的对流层延迟模型估计的对流层延迟量,计算通过定位运算所计算的对流层延迟量的准确性的第二延迟准确性计算步骤。
[0250]
虽然已经参照以上示例性实施例描述了本发明,但本发明不限于以上示例性实施例。在本发明的范围内可以对本发明的配置和细节进行本领域技术人员可以理解的各种修改。
[0251]
本技术基于并要求于2019年9月5日提交的日本专利申请no.2019-162454的优先权,通过引用将其公开内容全部并入本文。
[0252]
工业适用性
[0253]
如上所述,根据本发明,可以提高定位准确性。本发明可用于需要使用卫星定位系统进行定位的技术领域。
[0254]
附图标记列表
[0255]1ꢀꢀꢀꢀꢀ
定位辅助设备
[0256]2ꢀꢀꢀꢀꢀ
估计单元
[0257]
2a
ꢀꢀꢀꢀ
第一估计单元
[0258]
2b
ꢀꢀꢀꢀ
第二估计单元
[0259]3ꢀꢀꢀꢀꢀ
精确度计算单位
[0260]
3a
ꢀꢀꢀꢀ
第一精确度计算单元
[0261]
3b
ꢀꢀꢀꢀ
第二精确度计算单元
[0262]4ꢀꢀꢀꢀꢀ
延迟准确性计算单元
[0263]
4a
ꢀꢀꢀꢀ
第一延迟准确性计算单元
[0264]
4b
ꢀꢀꢀꢀ
第二延迟准确性计算单元
[0265]
10
ꢀꢀꢀꢀ
生成侧设备
[0266]
11
ꢀꢀꢀꢀ
定位信号接收单元
[0267]
12
ꢀꢀꢀꢀ
定位单元
[0268]
13
ꢀꢀꢀꢀ
局部校正信息生成单元
[0269]
14
ꢀꢀꢀꢀ
定位误差计算单元
[0270]
15
ꢀꢀꢀꢀ
通信单元
[0271]
20
ꢀꢀꢀꢀ
使用侧设备
[0272]
21
ꢀꢀꢀꢀ
定位信号接收单元
[0273]
22
ꢀꢀꢀꢀ
通信单元
[0274]
23
ꢀꢀꢀꢀ
定位单元
[0275]
24
ꢀꢀꢀꢀ
控制单元
[0276]
110
ꢀꢀꢀ
计算机
[0277]
111
ꢀꢀꢀ
cpu
[0278]
112
ꢀꢀꢀ
主存储器
[0279]
113
ꢀꢀꢀ
存储设备
[0280]
114
ꢀꢀꢀ
输入接口
[0281]
115
ꢀꢀꢀ
显示控制器
[0282]
116
ꢀꢀꢀ
数据读取器/写入器
[0283]
117
ꢀꢀꢀ
通信接口
[0284]
118
ꢀꢀꢀ
输入设备
[0285]
119
ꢀꢀꢀ
显示设备
[0286]
120
ꢀꢀꢀ
记录介质
[0287]
121
ꢀꢀꢀ
总线
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。