1.本发明属于工业集中控制技术领域,具体涉及一种自适应的多源缓变量选控方法。
背景技术:
2.远方集控现已成为工控领域的主流控制手段,对于安全生产、经济效益相关的关键模拟量数据,尤其是缓慢变化的模拟量数据在采用时的可靠性也提出了更高要求,并且集控系统如何在长周期无人处理劣化数据源头性问题时,仍能甄别、采用最合适的数据,减少维护成本、提高经济效益,成为了集控领域内不断努力的方向。
3.本发明针对集控系统采集到的缓变模拟量数据真实性问题进行了深入研究,从多目标选择、有效性判断、滑动均值计算等方面着手,并且此方法具备一定的自我学习能力,对数据真实性以及有效性进行了更为深层次的甄别,因为可显著提升集控系统采集数据的可靠性,保证了生产系统的稳定运行。
技术实现要素:
4.本发明目的是在无法解决数据源头性缓慢劣化情况下,为用户提供一种缓慢变化模拟量的选择控制方法,通过自身的学习能力,甄别和采用最合适的数据,解决数据缓慢劣化不可知等品质调节问题。
5.一种自适应的多源缓变量选控方法,它包括以下步骤:
6.步骤1:初始化集控系统,检测集控系统是否正常运行;
7.步骤2:进行集控系统信号的采集;
8.步骤3:对信号的优先级进行排序,并将当前优先级最高的数据赋值给主用信号数据m;
9.步骤4:检测主用信号数据m的有效性是否正常,判据为:若该信号数据处于量程范围内,同时数据通道质量(即为plc采集模块判断采集到的电流或电压是否超过模块设定的参数限值)正常,则执行步骤5;否则将该信号数据的使用优先级置于最末位,同时闭锁该信号,标记其不可信并发出警告,并跳转执行步骤3;
10.步骤5:复位滑动周期t和滤波值p至初始态,满足即执行步骤6;
11.步骤6:对信号数据m进行中位滑动均值计算,获得单位周期内的数据值yn;
12.步骤7:将信号数据yn与过滤后的最大值y
max
或最小值y
min
进行比较,若︳y
max-yn︳≤α(α为常量)且︳y
n-y
min
︳≤α(α为常量),执行步骤8,否则递增滤波值p,增量步长为λ(λ为常量),再跳转执行步骤6;
13.步骤8:检测λ执行次数β,若β≤γ(γ为常量),执行步骤9,否则递增滑动周期t,增量步长为μ(μ为常量),复归β,再跳转执行步骤6;
14.步骤9:若滑动周期t≠t μ且β≥1,将该信号数据的使用优先级置于最末位,闭锁该信号,标记其不可信并发出警告,再跳转执行步骤3,否则执行步骤10;
15.步骤10:获取上一个滑动周期计算后的数据值y
n-1
,并判断信号数据yn是否合理,若合理则执行步骤11,否则将该信号数据的使用优先级置于最末位,闭锁该信号,标记其不可信并发出警告,再跳转执行步骤3;
16.步骤11:每隔指定时间段,将最新数据值yn和人工设定值y
op
比较,判断最新数据值yn是否合理,若合理,则执行步骤12,若不合理则将人工设定值y
op
赋值给数据yn,并发出警告;
17.步骤12:采用信号数据yn作为最终使用的数据。
18.在步骤6中,对信号数据m进行中位滑动均值计算,即设定一定时间的滑动周期t,每隔时间t取一个数,并对周期内最新的n 2(n 2=t/t)个数据值进行数值大小排序,过滤p个最大值和最小值,再对剩下的数据进行平均值计算,得到单位周期内的数据值yn。
19.在步骤10中,获取上一个滑动周期计算后的数据值y
n-1
,若︳y
n-y
n-1
︳≤ε(ε为常量),此时yn数值合理,执行步骤11。
20.在步骤11中,每隔m个滑动周期tm,将最新数据值yn和人工设定值y
op
比较,若︳y
n-y
op
︳≤η(η为常量),此时yn数值合理,执行步骤12,否则将人工设定值y
op
赋值给数据yn,并发出警告。
21.在步骤1中,初始化集控系统,检测集控系统是否正常运行,判据为:集控系统自检正常系统字为目标值,否则等待满足判据条件。
22.在步骤3中,对通过步骤2获得的若干数字信号进行优先级的排序,在所有数据均无闭锁状态下,获得优先级的排序顺序,然后将当前优先级最高的数据赋值给主用数据。
23.与现有技术相比,本发明具有如下技术效果:
24.1)本发明采用自适应的中位滑动均值计算法,能够在一定程度上完全解决偶发性跳变以及缓慢劣化对数据真实性带来的影响,定时复位干预法能够解决微小误差累积偏差,提高数据的可靠性和稳定性。
25.2)本发明通过数据适时地判断、比较、过滤和筛选,能够在一定程度上解决数据源头性缓慢劣化情况下带来的数据不可靠问题,通过自身的学习能力,强化了数据的可靠性,进而减少数据来源的维护周期和成本,提高经济效益。
附图说明
26.下面结合附图和实施例对本发明作进一步说明:
27.图1为本发明的流程图。
具体实施方式
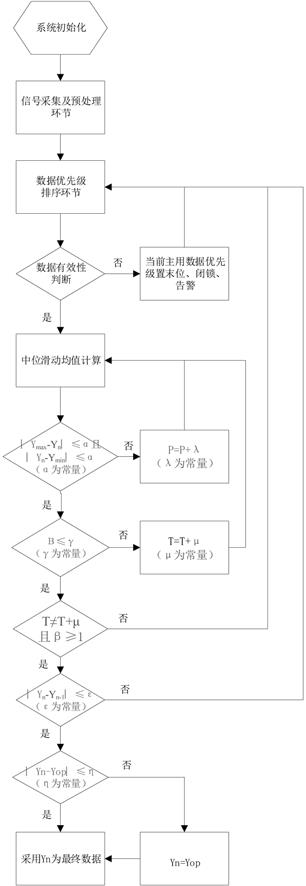
28.如图1所示,一种自适应的多源缓变量选控方法,它包括以下步骤:
29.步骤1:初始化集控系统(包括冷/热启动),检测集控系统是否正常运行,判据为:plc自检正常系统字为1,否则等待满足判据条件;集控系统可选择plc集控系统;
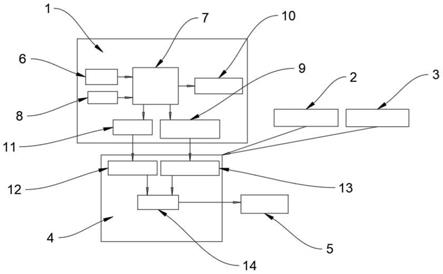
30.步骤2:集控系统模拟量采集模块采集模拟量信号i1、信号i2、信号i3等若干数据,并进行模/数转换,分别得到m1、m2、m3等若干数字信号;
31.步骤3:对由步骤2获得的若干数字信号(信号源)的使用优先级进行排序,在所有数据均无闭锁状态下,优先级顺序为m1≥m2≥m3,将当前优先级最高的数据赋值给主用数据m;
32.步骤4:检测当前主用信号数据m有效性是否正常,判据为:数据处于量程范围内,同时数据通道质量(即为plc采集模块判断采集到的电流或电压是否超过模块设定的参数限值)正常,满足即执行步骤5,否则将该信号数据的使用优先级置于最末位,闭锁该信号,标记其不可信并发出警告,再跳转执行步骤3;
33.步骤5:复位滑动周期t和滤波值p至初始态,满足即执行步骤6;
34.步骤6:对信号数据m进行中位滑动均值计算,即设定一定时间的滑动周期t,每隔时间t取一个数,并对周期内最新的n 2(n 2=t/t)个数据值进行数值大小排序,过滤p个最大值和最小值,再对剩下的数据进行平均值计算,其中n为信号数据的个数,得到单位周期内的数据值yn;
35.步骤7:将信号数据yn与过滤后的最大值y
max
或最小值y
min
进行比较,若︳y
max-yn︳≤α(α为常量)且︳y
n-y
min
︳≤α(α为常量),执行步骤8,否则递增滤波值p,增量步长为λ(λ为常量),再跳转执行步骤6;
36.步骤8:检测λ执行次数β,若β≤γ(γ为常量),执行步骤9,否则递增滑动周期t,增量步长为μ(μ为常量),复归β,再跳转执行步骤6;
37.步骤9:若滑动周期t≠t μ且β≥1,将该信号数据的使用优先级置于最末位,闭锁该信号,标记其不可信并发出警告,再跳转执行步骤3,否则执行步骤10;
38.步骤10:获取上一个滑动周期计算后的数据值y
n-1
,若︳y
n-y
n-1
︳≤ε(ε为常量),此时yn数值合理,执行步骤11,否则将该信号数据的使用优先级置于最末位,闭锁该信号,标记其不可信并发出警告,再跳转执行步骤3;
39.步骤11:每隔m个滑动周期tm,将最新数据值yn和人工设定值y
op
比较,若︳y
n-y
op
︳≤η(η为常量),此时yn数值合理,执行步骤12,否则将人工设定值y
op
赋值给数据yn,并发出警告;
40.步骤12:采用信号数据yn作为最终使用的数据。
41.实施例:为验证本方法的可行性,对某水电站水库水位数据进行分析,水库实际水位在一定时间内恒定为100.0m。主用水位m有效区间为80.0m-120.0m之间,当前m1=78.0m,m2=100.0m,m3=101.0m,因水位m1超过有效量程,闭锁不可信发出警告,故优先采用m2为主用水位。设定时间间隔t=10s,滑动周期t=100s,边缘去除数据p=1个,m=2个,滑动周期tm=200s,α=0.2m,γ=1次,λ=1个,μ=20s,ε=0.5m,η=0.3m,y
op
=100.0m。
42.1、m2在一个120s的采样数据为100.0m、101.2m、99.5m、100.5m、100.4m、99.9m、100.2m、100.4m、100.7m、99.8m、100.0m、100.0m,单位周期水位2yn=100.2m,︳y
max-yn︳=0.5m>α,︳y
n-y
min
︳=0.4m>α,需再次进行均值计算,此时p=λ 1=2;
43.2、第二次均值计算后,此时︳y
max-yn︳=0.3m>α,︳y
n-y
min
︳=0.3m>α,需进行第三次均值计算,此时p=λ 1=3;
44.3、第三次均值计算后,此时︳y
max-yn︳=0.2m≤α,︳y
n-y
min
︳=0.2m≤α,但β=2>γ,需进行第四次均值计算,此时t=100s μ=120s;
45.4、第四次均值计算后,此时︳y
max-yn︳=0.5m>α,︳y
n-y
min
︳=0.4m>α,β=1,t=120s,故水位m2闭锁不可信发出警告;
46.m3在一个120s的采样数据为100.2m、100.1m、100.1m、100.0m、99.9m、100.0m、99.9m、99.8m、99.9m、99.8m、99.7m、99.7m,单位周期水位3y
n-1
=99.9m,︳y
max-yn︳=0.2m≤α,︳y
n-y
min
︳=0.1m≤α;单位周期水位3yn=99.8m,︳y
max-yn︳=0.2m≤α,︳y
n-y
min
︳=0.2m≤α,此时︳y
n-y
n-1
︳=0.5m≤ε,故采用3yn作为最终使用的水位数据。我们从m3采样数据的变化不难看出m3有劣化趋势,当︳y
n-y
op
︳>η时,主用水位yn恒等于y
op
=100.0m。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。