1.本发明涉及车辆自动驾驶安全领域,尤其涉及一种车辆轨迹控制方法。
背景技术:
2.车辆在制动过程中会出现两侧制动力不等的工况,例如:某一制动器失效,或车辆两侧路面附着系数不同,车辆会出现非预期的偏转。
3.如图2所示,传统车辆(非自动驾驶),如果右前制动器失效(右前制动力为0),此时左侧制动力f_lf会产生逆时针的偏转力矩m_1,驱使车辆向发生左侧偏转。此时驾驶员会反打方向盘让车轮产生一个额外的转角δr,转向车轮的侧向力f_lf和f_rf形成一个顺时针的纠正力矩m_2,以抵消偏转力矩,保证整车在预期轨迹一定范围内行驶。
4.自动驾驶车辆在出现两侧制动力不等时,由于无法人为干预,车辆在偏转力矩作用下发生非预期偏转,不能保证预期轨迹行驶,严重时可能会导致事故。
技术实现要素:
5.为解决上述问题,本发明提供一种车辆轨迹控制方法,自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,通过控制电控转向系统产生转向角,以减小车辆两侧制动力不一致导致的车辆轨迹偏移,解决了背景技术中出现的问题。
6.本发明的目的是提供一种车辆轨迹控制方法,自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,通过控制电控转向系统产生转向角,以减小车辆两侧制动力不一致导致的车辆轨迹偏移。
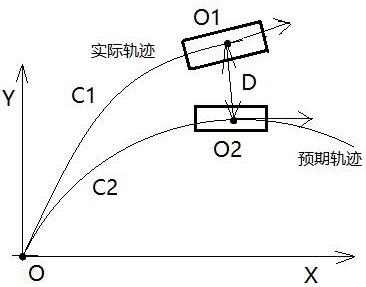
7.进一步改进在于:自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,先获取整车轨迹偏移量d,再以轨迹偏移量d为控制变量,通过pid控制实时调整车轮的转向角度δr,目标是将d最小化,保证车辆在预期轨迹的一定范围内行驶。
8.进一步改进在于:整车制动开始于o点,整车发生非预期偏移,沿着c1(实际轨迹)行驶至o1点,行驶距离为曲线oo1的长度;如果整车按c2(预期轨迹)行驶,行驶距离为曲线oo1相等长度后,到达o2点,即o2点为整车预期的位置,o1o2定义为整车轨迹偏移量d;轨迹偏移量d通过以下两种方法计算:由整车的传感器计算得到:传感器包含:横摆角速度、侧向加速度、纵向加速度和轮速传感器等,计算出实际轨迹和预期轨迹的坐标,以计算轨迹偏移量d;由自动驾驶控制系统计算得到:定位系统或摄像头可以识别整车实际轨迹和预期轨迹的坐标,以计算轨迹的偏移量d;以轨迹偏移量d作为控制变量,通过pid(比例-积分-微分)算法实时计算需求的车轮转向角度δr,并将δr发送给电控转向系统,电控转向系统不断调整车轮转向角度,利用转向轮的侧向力产生的纠正力矩来抵消两侧制动力差产生的整车偏转力矩,目标是将d最小化,保证车辆在预期轨迹的一定范围内行驶。
9.本发明的有益效果:本发明自动驾驶车辆两侧制动力不等时,整车发生非预期偏
移的情况下,在自动驾驶车辆的原有制动系统和转向系统基础上,只需通过控制产生转向角,即可实现减小车辆两侧制动力不一致导致的车辆轨迹偏移且保证车辆在预期轨迹的一定范围内行驶,保证了车辆的稳定性和安全性。
附图说明
10.图1是本发明具体实施方式的示意图。
11.图2是本发明背景技术中现有技术示意图(以右前轮制动失效为例)。
12.图2中:f_lf:左前轮制动力,f_lr:左后轮制动力,f_rr:右后轮制动力,f_lf:左前轮侧向力,f_rf:右前轮侧向力,m_1:两侧制动力差产生的偏转力矩,m_2:两前轮侧向力产生的偏转力矩。
具体实施方式
13.为了加深对本发明的理解,下面将结合实施例对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
14.如图1所示,本实施例提供一种车辆轨迹控制方法,自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,通过控制电控转向系统产生转向角,以减小车辆两侧制动力不一致导致的车辆轨迹偏移。自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,先获取整车轨迹偏移量d,再以轨迹偏移量d为控制变量,通过pid控制实时调整车轮的转向角度δr,目标是将d最小化,保证车辆在预期轨迹的一定范围内行驶。
15.整车制动开始于o点,整车发生非预期偏移,沿着c1(实际轨迹)行驶至o1点,行驶距离为曲线oo1的长度;如果整车按c2(预期轨迹)行驶,行驶距离为曲线oo1相等长度后,到达o2点,即o2点为整车预期的位置,o1o2定义为整车轨迹偏移量d;轨迹偏移量d通过以下两种方法计算:由整车的传感器计算得到:传感器包含:横摆角速度、侧向加速度、纵向加速度和轮速传感器等,计算出实际轨迹和预期轨迹的坐标,以计算轨迹偏移量d;由自动驾驶控制系统计算得到:定位系统或摄像头可以识别整车实际轨迹和预期轨迹的坐标,以计算轨迹的偏移量d;以轨迹偏移量d作为控制变量,通过pid(比例-积分-微分)算法实时计算需求的车轮转向角度δr,并将δr发送给电控转向系统,电控转向系统不断调整车轮转向角度,利用转向轮的侧向力产生的纠正力矩来抵消两侧制动力差产生的整车偏转力矩,目标是将d最小化,保证车辆在预期轨迹的一定范围内行驶。
16.在自动驾驶车辆的原有制动系统和转向系统基础上,只需通过控制产生转向角,即可实现减小车辆两侧制动力不一致导致的车辆轨迹偏移且保证车辆在预期轨迹的一定范围内行驶,保证了车辆的稳定性和安全性。
技术特征:
1.一种车辆轨迹控制方法,其特征在于:自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,通过控制电控转向系统产生转向角,以减小车辆两侧制动力不一致导致的车辆轨迹偏移。2.如权利要求1所述一种车辆轨迹控制方法,其特征在于:自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,先获取整车轨迹偏移量d,再以轨迹偏移量d为控制变量,通过pid控制实时调整车轮的转向角度δr,目标是将d最小化,保证车辆在预期轨迹的一定范围内行驶。3.如权利要求2所述一种车辆轨迹控制方法,其特征在于:整车制动开始于o点,整车发生非预期偏移,沿着c1(实际轨迹)行驶至o1点,行驶距离为曲线oo1的长度;如果整车按c2(预期轨迹)行驶,行驶距离为曲线oo1相等长度后,到达o2点,即o2点为整车预期的位置,o1o2定义为整车轨迹偏移量d;轨迹偏移量d通过以下两种方法计算:由整车的传感器计算得到:传感器包含:横摆角速度、侧向加速度、纵向加速度和轮速传感器等,计算出实际轨迹和预期轨迹的坐标,以计算轨迹偏移量d;由自动驾驶控制系统计算得到:定位系统或摄像头可以识别整车实际轨迹和预期轨迹的坐标,以计算轨迹的偏移量d;以轨迹偏移量d作为控制变量,通过pid(比例-积分-微分)算法实时计算需求的车轮转向角度δr,并将δr发送给电控转向系统,电控转向系统不断调整车轮转向角度,利用转向轮的侧向力产生的纠正力矩来抵消两侧制动力差产生的整车偏转力矩,目标是将d最小化,保证车辆在预期轨迹的一定范围内行驶。
技术总结
本发明的目的是提供一种车辆轨迹控制方法,自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,通过控制电控转向系统产生转向角,在自动驾驶车辆的原有制动系统和转向系统基础上,只需通过控制产生转向角,即可实现减小车辆两侧制动力不一致导致的车辆轨迹偏移且保证车辆在预期轨迹的一定范围内行驶,保证了车辆的稳定性和安全性。保证了车辆的稳定性和安全性。保证了车辆的稳定性和安全性。
技术研发人员:袁永彬 张平平
受保护的技术使用者:芜湖伯特利电子控制系统有限公司
技术研发日:2020.09.22
技术公布日:2022/4/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。