一种新型lqg控制方法
技术领域
1.本发明涉及车辆控制技术领域,尤其涉及一种新型lqg控制方法。
背景技术:
2.主动悬架由于可以提供主动控制力,能够根据车辆当前行驶工况实施自适应控制,主动调节悬架状态,而得到了广泛的关注。而主动悬架控制的关键就在于选取合适的控制策略,因此目前主动悬架控制策略成为众多学者研究的重点。而随机线性最优控制(lqg)由于存在线性化、设计简单、适应性强的特点,从被提出以来,关于车辆主动悬架随机线性最优控制研究的文章便不断被发表。设计随机线性最优控制策略的关键就在于状态加权系数的选择,在文献
1.中,采用了层次分析法(analaytichierarchyprocess)确定状态加权系数,文献
2.、文献
3.中,分别使用了遗传算法(geneticalgorithm)和遗传粒子群算法确定状态加权参数,并取得了不错的控制效果。但是目前确定状态加权参数的方法多为定性分析或单纯地基于评价指标数值最小化,未能考虑不同路面等级下,车辆对悬架各性能指标的不同要求,从而使得控制方法无法最大程度地满足当前路面悬架的实际需求,达到最优的控制效果。
3.[1]罗鑫源,杨世文.基于ahp的车辆主动悬架lqg控制器设计[j].控制理论与应用,2004,21(1):139-144.
[0004]
[2]孟杰,张凯,焦洪宇.基于遗传算法优化的汽车主动悬架lqg控制器的设计[j].机械科学与技术,2013,32(6):914-918.
[0005]
[3]陈双,宗长富.车辆主动悬架的遗传粒子群lqg控制方法[j].汽车工程,2015,37(2):189-193.
[0006]
[4]陈英.车辆悬架的lqg控制器设计[d].西安理工大学,2017.
[0007]
[5]吴旺生.基于萤火虫lqg控制算法的半主动悬架研究[d].安徽工程大学,2017.
[0008]
[6]陈士安,祖广浩.磁流变半主动悬架的泰勒级数-lqg时滞补偿控制方法[j].振动与冲击,2017,3(8)190-196.
[0009]
[7]朱天军,宗长富,杨得军等.汽车乘坐舒适性主观评价方法[j].汽车技术,2008(3):8-11.
[0010]
[8]余志生.汽车理论.第五版[m].北京:机械工业出版社,2009.
[0011]
[9]thompsonag.anactivesuspensionwithoptimallinearstatefeedback[j].vehiclesystemdynamics,1976,5(4):187-203.
[0012]
[10]陈士安,邱峰,何仁,陆森林.一种确定车辆悬架lqg控制加权系数的方法[j].振动与冲击,2008,27(2):65-68.
[0013]
[11]赵珩,卢士富.路面对四轮汽车输入的时域模型[j].汽车工程,1999,21(2):112-117.
技术实现要素:
[0014]
本发明的目的在于解决上述现有技术存在的缺陷,提供一种新型 lqg控制方法。
[0015]
一种新型lqg控制方法,包括以下步骤:
[0016]
步骤1:建立整车七自由度主动悬架仿真模型;
[0017]
步骤2:建立悬架各性能指标lqg控制方法的阈值;所述指标包括:轮胎动载荷、悬架动挠度、车身加权加速度;
[0018]
步骤3:根据步骤2所得各性能指标阈值,基于层次分析法对 lqg控制方法的优化适应度函数进行构建;在构建时,当单一指标超过阈值时,应优先优化,而多个指标超过阈值时,按照设定的优化优先级权重进行优化;
[0019]
步骤4:基于步骤1所建立的整车七自由度仿真模型,通过遗传算法和步骤3中所构建的新型lqg控制的优化适应度函数,选取lqg控制的状态加权系数;
[0020]
步骤5:根据所述状态加权系数,计算得到新型lqg控制的最优反馈矩阵k;
[0021]
步骤6:根据所述最优反馈矩阵k最终构建新型lqg控制方法,其输出控制力u等于-x(t)*k;x(t)为任意时刻的反馈状态变量。
[0022]
进一步地,如上所述的方法,所述步骤1建立整车七自由度主动悬架仿真模型的方法如下:
[0023]
根据车身运动微分方程
[0024][0025][0026][0027]
和非簧载质量mi微分方程
[0028][0029]
建立整车七自由度主动悬架仿真模型;
[0030]
其中,m与mi分别为簧载质量与对应悬架的非簧载质量,z
i2
与z
i1
分别为对应悬架的簧载质量与非簧载质量的位移,z、θ、ψ分别为车身位移、车身俯仰角、车身侧倾角,ki与k
t
分别为对应悬架的弹簧弹性刚度与轮胎弹性刚度,ci为对应悬架的作动器阻尼,ui为对应悬架的作动器主动控制力,iy、i
x
分别为车身绕y轴与x 轴的转动惯量,a、b分别为前轴与后轴至
车身质心的距离,lf、lr分别为前轴与后轴的轴距,qi为路面不平度对对应悬架悬架的位移输入。
[0031]
进一步地,如上所述的方法,所述步骤2包括以下步骤:
[0032]
步骤21:当轮胎动载荷过大,对于制动和操作稳定性都有一定的影响,基于原则,当动载荷均方根值fd大于静载荷fs的1/3时,会出现轮胎跳离地面的可能,使行驶安全性严重恶化,因此,将fd/(fs/3)设为轮胎动载荷的阈值;
[0033]
步骤22:悬架动挠度过大时,会撞击悬架限位块,对乘坐舒适性和行驶安全性均有一定影响,基于原则,当悬架动挠度均方根值f大于悬架限位行程s的1/3时,存在撞击限位块的可能,造成冲击和噪声,因此,将f/(s/3)设为悬架动挠度的阈值;
[0034]
步骤23:车身加速度影响乘坐舒适性,根据iso2631-1的评价标准,其加权加速度均方根值与人的主观感觉关系,将1.25 设为车身加权加速度的阈值。
[0035]
进一步地,如上所述的方法,所述步骤3中lqg控制方法的优化适应度函数构建方法如下:
[0036]
步骤41:通过层次分析法确定车身加速度、轮胎动载荷、悬架动挠度的权重系数比,以明确各性能参数的优化优先级,当未超过阈值时,将其权重系数比设为5:1:0;当超过阈值时,将其权重系数比设为7:1;1;
[0037]
步骤42:设计惩罚系数ξ=10,以提高指标超过阈值时,其优化优先级;
[0038]
步骤43:根据41、42和步骤2,构建各性能指标优化适应度函数:
[0039]
根据人体主观感觉,构建车身加速度适应度函数r1
[0040][0041]
构建轮胎动载荷适应度函数r2
[0042][0043]
构建悬架动挠度适应度函数r3
[0044][0045]
则,总适应度函数为r=r1 r2 r3。
[0046]
进一步地,如上所述的方法,步骤5所述lqg控制的最优反馈矩阵k的构建方法如下:
[0047]
通过matlab中lqr函数求解,计算最优反馈矩阵k。
[0048]
有益效果:
[0049]
本发明提供的新型lqg控制策略能够综合考虑当前路面等级下各悬架性能对驾驶
的影响,有效的自动选择当前路面等级下各性能的优化优先级,具有更好的适用性。本发明确定了不同路面等级下对应的lqg控制参数,以被动悬架和传统的lqg控制策略为比较对象,仿真验证了新型lqg控制方法具有更好的实用性和优化控制效果。
附图说明
[0050]
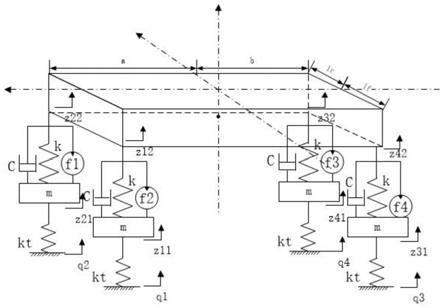
图1为整车7自由度悬架模型;
[0051]
图2(a)为在d级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在左前悬架轮胎动位移的对比图;
[0052]
图2(b)为在d级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在左前悬架动挠度的对比图;
[0053]
图2(c)为在d级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在车身垂直加速度上的对比图;
[0054]
图2(d)为在d级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在车身俯仰角速度的对比图;
[0055]
图2(e)为在d级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在车身侧倾加速度的对比图;
[0056]
图3(a)为在b级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在左前车轮动位移的对比图;
[0057]
图3(b)为在b级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在左前悬架动挠度的对比图;
[0058]
图3(c)为在b级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在车身垂向加速度上的对比图;
[0059]
图3(d)为在b级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在车身俯仰加速度的对比图;
[0060]
图3(e)为在b级路面下,被动悬架与传统lqg和新型lqg 控制主动悬架在车身侧倾加速度的对比图。
具体实施方式
[0061]
为使本发明的目的、技术方案和优点更加清楚,下面本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0062]
由于本发明涉及的控制方法需要较完整的悬架工作状况,而整车七自由度模型能够全面反映悬架工况,因此建立整车7自由度主动悬架模型,如图1所示。
[0063]
车身运动微分方程如下:
[0064]
[0065][0066][0067]
非簧载质量mi微分方程如下:
[0068][0069]
其中,m与mi分别为簧载质量与对应悬架的非簧载质量,z
i2
与z
i1
分别为对应悬架的簧载质量与非簧载质量的位移,z、θ、ψ分别为车身位移、车身俯仰角、车身侧倾角,ki与k
t
分别为对应悬架的弹簧弹性刚度与轮胎弹性刚度,ci为对应悬架的作动器阻尼,ui为对应悬架的作动器主动控制力,iy、i
x
分别为车身绕y轴与x 轴的转动惯量,a、b分别为前轴与后轴至车身质心的距离,lf、lr分别为前轴与后轴的轴距,qi为路面不平度对对应悬架悬架的位移输入。
[0070]
本发明采用滤波白噪声法模拟路面不平度输入,文献
[11]
指出,同轴左右车轮之间路面不平度输入之间存在相关性,互相干涉,则四轮相干道路激励输入的状态方程为:
[0071][0072][0073][0074]
p=[b
ꢀ‑
b db
ꢀ‑
db o2×1]
′
[0075][0076]
a=2πf0u
[0077]
其中,ξ=[ξ
1 ξ2]
′
为中间变量,u为车速(m/s);f0为下截止频率,等于0.011u;n0为空间参考频率,取0.1;w为高斯白噪声;gq(n0)为路面不平度系数,l为前后轴轴距,查阅文献可得 a0=3.1851,a1=0.2063,a2=0.0108,b0=3.223,b1=0.59,b2=0.0327。
[0078]
根据式(1)(2)建立如下状态空间
[0079][0080]
其中,x为系统状态向量
[0081]
x=[x
1 x
2 x
3 x
4 x
5 x
6 x
7 x
8 x
9 x
10 x
11 x
12 x
13 x
14 x
15
]
′
[0082]
x1=z
11-q
1 x3=z
31-q3[0083]
x2=z
21-q
2 x4=z
41-q
4 x5=z
12-z
11
[0084]
x6=z
22-z
2 x7=z
32-z
31 x8=z
42-z
41
[0085][0086]
x
15
=z
41
[0087]
u为输入矩阵,在本模型中为主动控制力[f
1 f
2 f
3 f4]
′
[0088]
w为高斯噪声输入矩阵,即自由度整车主动悬架lqg控制器设计
[0089]
由于轮胎动位移影响车辆的行驶安全性,车身加速度影响乘坐舒适性,悬架动挠度过大也对会使安全性和舒适性恶化,设计lqg控制器时需要综合考虑三者的优化控制。基于此,设计了7自由度整车主动悬架的lqg控制器的控制误差j为:
[0090][0091]
将其改写为二次函数积分形式如下
[0092][0093]
根据公式(6)给出的7自由度整车悬架状态空间求得相关矩阵。
[0094]
当模型的输入与状态加权系数都确定以后,最优控制反馈增益矩阵k就可以由riccati方程给出,其形式为:
[0095]
ak ka
′
q-kbr-1b′
k fwf
′
=0
ꢀꢀꢀꢀ
(9)
[0096]
根据lqg控制理论的控制率,由任意时刻的反馈状态变量x(t),可得到t时刻作动器的最优控制力u。
[0097]
而状态加权系数直接影响lqg的控制效果,目前确定lqg状态加权系数的方法主要分为层次分析法和寻优算法两种。前者由于存在主观因素,因此难以达到最优控制效果。故目前多采用后者进行状态加权系数的确定,如文献
[5]
采用了遗传算法、文献
[6]
采用了萤火虫群算法进行了参数的寻优。
[0098]
目前寻优算法的适应度函数r多为
[0099][0100]
其中,分别为lqg控制下的悬架与被动悬架的车身加速度;分别为lqg控制下的悬架与被动悬架的车身俯仰角加速度;分别为lqg控制下的悬架与被动悬架的车身侧倾角加速度;f
1i
、f
0i
分别为lqg控制下的悬架与被动悬架的轮胎动载荷;d1i
、 d
0i
分别为lqg控制下的悬架与被动悬架的悬架动挠度。可以看出其控制策略的基本思想就是追求数值优化的最大化。但该适应度函数并未考虑不同路面等级下,三个参数优化的不同优先级,使得控制适用性未达到最优。
[0101]
因此,本发明设计了一种以车身加速度、悬架动挠度、轮胎动载荷均方根值为指标,将乘坐舒适性和安全性量化的lqg控制效果的评价方法:
[0102]
车身加速度主要影响乘坐舒适性,根据iso2631-1的评价标准,加权加速度均方根值与人的主观感觉关系如表1所示:
[0103]
表1加权加速度均方根值与人的主观感觉之间的关系
[0104][0105]
人的主观感觉受个人因素影响,存在不同感觉区间加权加速度数值重叠的现象,为了保证控制效果,我们选择该区间与下一区间数值交叉点作为该区间上限。
[0106]
基于车身加权加速度均方根值的乘坐舒适性主观感受难以与轮胎动载荷、悬架动挠度直接比较,存在不可公度性。因此本发明以被动悬架作为参考,通过遗传算法寻优获得车身加权加速度均方根值处于各感觉区间上限时,被动悬架轮胎动载荷均方根值,以此动载荷均方根值权重作为该感觉区间的基础权重值,以轮胎动载荷均方根处于阈值附近时,被动悬架加权加速度均方根值作为车身加权加速度均方根值的阈值。
[0107]
轮胎动载荷主要影响行驶安全性。动载荷过大,对于制动和操作稳定性都有一定的影响,基于原则,当动载荷均方根值fd大于静载荷fs的1/3时,会出现轮胎跳离地面的可能,使行驶安全性严重恶化。
[0108]
悬架动挠度对乘坐舒适性和行驶安全性均有一定影响。基于原则,当悬架动挠度均方根值f大于悬架限位行程s的1/3时,存在撞击限位块的可能,造成冲击和噪声。
[0109]
通过参考ahp的相关文献
[10]
,将工况较好的情况下(a、b级路面),车身加速度、轮胎动载荷、悬架动挠度的主观权重系数多设为5、1、0;将工况较恶劣的情况下(d级路面),车身加速度、轮胎动载荷、悬架动挠度的主观权重系数多设为7、1、1。本发明以该主观权重系数作为三个指标在悬架同等工况条件下,lqg控制的优先级权重系数。
[0110]
本发明的控制思路为,当单一指标超过阈值时,应优先优化,而多个指标超过阈值时,按照设定的优化优先级权重进行优化。
[0111]
设计惩罚系数ξ=10,以提高指标超过阈值时,其优化优先级。
[0112]
基于上述思路,设计了以下lqg控制的适应度函数
[0113]
(1)根据人体主观感觉,构建车身加速度适应度函数r1
[0114][0115]
(2)构建轮胎动载荷适应度函数r2
[0116][0117]
(3)构建悬架动挠度适应度函数r3
[0118][0119]
则总适应度函数为r=r1 r2 r3
[0120]
新的适应度函数会根据车身加速度、悬架动挠度、轮胎动载荷的恶化程度,确定不同的优化优先级,提高了其控制效果和控制适用性。
[0121]
实例仿真
[0122]
为了验证新型lqg控制策略的有效性,选取了被动悬架、基于传统lqg控制策略的主动悬架和基于新型lqg控制策略的主动悬架进行性能对比和分析。
[0123]
选取的悬架参数如表3所示:
[0124]
表3悬架参数
[0125][0126]
以d级路面、车速10m/s工况和b级路面、车速30m/s进行仿真模拟。
[0127]
使用遗传算法(ga)对传统lqg控制策略与新型lqg控制策略的状态加权系数进行寻优,对应的状态加权系数如表4所示:
[0128]
表4 b级路面状态加权系数
[0129][0130]
表5 d级路面状态加权系数
[0131][0132]
利用之前建立的状态空间方程,可以调用matlab中 [k,s,e]=lqr(a,b,q,r,n),计算最优反馈矩阵k。将计算求得的量化总最优反馈矩阵带入matlab/simulink主动悬架与被动悬架仿真框图,得到各性能指标的仿真曲线图,图2(a)-(e)、图3(a)-(e)分别为 d级和b级路面下,被动悬架与传统lqg和新型lqg控制主动悬架各性能指标对比图。
[0133]
三种悬架系统各性能评价指标的均方根值如表5所示
[0134]
表6三种悬架系统各性能评价指标均方根值
[0135][0136]
[0137]
由图2(a)-(e)和表6,可以分析得出:
[0138]
(1)在b级路面时,新型lqg控制相较传统lqg控制,车身加速度有所恶化(2.5%),但仍处于同意主观舒适度区间,乘坐舒适性的恶化可以不计,而轮胎动位移相较传统lqg控制却下降了14.2%,有效改善了驾驶安全性。
[0139]
(2)在d路面时,由于路况较差,三种指标均处于恶劣工况情况下,新型lqg控制相较于传统lqg控制,在车身加速度略有恶化的情况下(3.06%),保证了悬架动挠度处于阈值(0.0266)以下,防止撞击限位块的情况的发生,提高了乘坐舒适性和行驶安全性。
[0140]
经过上述分析,可以看出相较于传统lqg控制,本发明提供的新型lqg控制策略能够综合考虑当前路面等级下各悬架性能对驾驶的影响,有效的自动选择当前路面等级下各性能的优化优先级,具有更好的适用性。
[0141]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。