1.本发明属于医疗设备的位移测量技术领域,具体地说,涉及一种用于电动手术台位移距离测量的检测装置及检测方法。
背景技术:
2.一般的电动手术台的体位参数可归结为角度与长度测量。在测量这些的体位参数时,大多以旋转式电位器作为测量传感器。这种器件存在极易磨损的问题。特别对手术台而言,因受医生身高、手术体位的限制,基本都在一个位置附近进行手术台调整,更易发生测量电位器磨损的情况。电动液压手术台升降和平移为直线运动,位移距离的测量需使用到距离传感器,目前常见的测量距离的方法主要包括:电位器测距、红外传感器测距和拉绳位移传感器。
3.其中,电位器测距是通过机械结构,使电位器与运动关联,通过测量电位器电阻分压变化,计算位移距离。但是,电位器测距方法有如下缺点:
4.1、需机械结构配合,加工以及匹配有难度;
5.2、电位器碳刷易磨损,寿命短。
6.其中,拉绳位移传感器是将位移距离转化为角度,通过测量角度变化,计算位移距离。但是,拉绳位移传感器测距方案有如下缺点:
7.1、尺寸偏大,安装不便;
8.2、价格昂贵,成本高。
9.其中,红外传感器是根据红外信号遇到障碍物距离的不同,反射的强度也不同的原理,进行距离测量。但是,红外传感器测距方案有如下缺点:
10.1、输出值与位移距离无线性关系,精度无法保证;
11.2、输出值近距离与远距离重叠,无法从零距离开始测量。
技术实现要素:
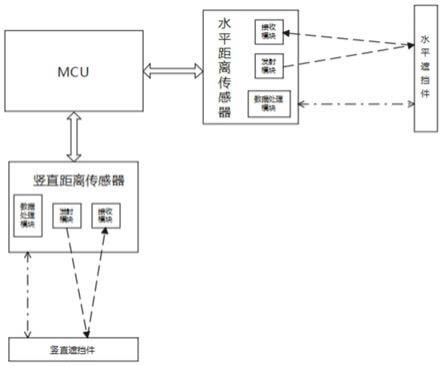
12.为解决现有技术存在的上述缺陷,本发明提出了一种用于电动手术台位移距离测量的检测装置,该装置包括:水平距离采集组件和竖直距离采集组件和微控制器;
13.水平距离采集组件和竖直距离采集组件均固定安装在电动手术台上,微控制器分别与水平距离采集组件和竖直距离采集组件进行通信连接;
14.所述水平距离采集组件,用于实时采集所需要水平方向移动的水平距离;
15.所述竖直距离采集组件,用于实时采集所需要竖直方向移动的纵向距离;
16.所述微控制器,用于分别从水平距离采集组件和竖直距离采集组件读取对应的距离,进而获得对应的位移距离;根据获得的对应的位移距离,控制电动手术床平移或升降。
17.作为上述技术方案的改进之一,所述水平距离采集组件包括:水平遮挡件和水平距离传感器;
18.水平遮挡件与水平距离传感器位于同一水平方向上,且水平遮挡件位于水平距离
传感器正前方;
19.所述水平距离传感器为tof传感器,用于实时发射和接收水平激光信号。
20.作为上述技术方案的改进之一,所述水平距离传感器包括:水平发射模块、水平接收模块和水平数据处理模块;
21.所述水平发射模块,用于实时发射水平激光信号;
22.所述水平接收模块,用于实时接收水平激光信号;
23.所述水平数据处理模块,用于根据水平激光信号从发射到接收在空气中传播的时间t1和激光的传播速度c,得到水平距离d1:
[0024][0025]
作为上述技术方案的改进之一,所述竖直距离采集组件包括:竖直遮挡件和竖直距离传感器;
[0026]
竖直遮挡件与竖直距离传感器位于同一竖直方向上,且竖直遮挡件位于竖直距离传感器的正下方;
[0027]
所述竖直距离传感器为tof传感器,用于实时发射和接收竖直激光信号。
[0028]
作为上述技术方案的改进之一,所述竖直距离传感器包括:竖直发射模块、竖直接收模块和竖直数据处理模块;
[0029]
所述竖直发射模块,用于实时发射竖直激光信号;
[0030]
所述竖直接收模块,用于实时接收竖直激光信号;
[0031]
所述竖直数据处理模块,用于根据竖直激光信号从发射到接收在空气中传播的时间t2和激光的传播速度c,得到水平距离d2:
[0032][0033]
作为上述技术方案的改进之一,所述微控制器为mcu。
[0034]
作为上述技术方案的改进之一,所述微控制器的具体实现过程为:
[0035]
从水平距离传感器中读取水平距离,记为l1;并结合偏移值l01,计算位移距离lout1:
[0036]
lout1=l1
–
l01
[0037]
根据获得的位移距离lout1,控制电动手术床平移;
[0038]
从竖直距离传感器中读取竖直距离,记为l2;并结合偏移值l02,计算位移距离lout2:
[0039]
lout2=l2
–
l02
[0040]
根据获得的位移距离lout2,控制电动手术床升降。
[0041]
本发明还提供了一种用于电动手术台位移距离测量的检测方法,该方法包括:
[0042]
水平距离采集组件实时采集所需要水平方向移动的水平距离;
[0043]
竖直距离采集组件实时采集所需要竖直方向移动的纵向距离;
[0044]
微控制器分别从水平距离采集组件和竖直距离采集组件读取对应的距离,进而获得对应的位移距离;根据获得的对应的位移距离,控制电动手术床升降或平移。
[0045]
作为上述技术方案的改进之一,所述微控制器分别从水平距离采集组件和竖直距离采集组件读取对应的距离,进而获得对应的位移距离;根据获得的对应的位移距离,控制
电动手术床升降或平移;其具体过程为:
[0046]
从水平距离传感器中读取水平距离,记为l1;并结合偏移值l01,计算位移距离lout1:
[0047]
lout1=l1
–
l01
[0048]
根据获得的位移距离lout1,控制电动手术床平移;
[0049]
从竖直距离传感器中读取竖直距离,记为l2;并结合偏移值l02,计算位移距离lout2:
[0050]
lout2=l2
–
l02
[0051]
根据获得的位移距离lout2,控制电动手术床升降。
[0052]
本发明与现有技术相比的有益效果是:
[0053]
本发明的检测装置具有无机械磨损,寿命长的特点;对机械配合的要求低,应用简单;成本较拉绳位移传感器要低很多;精度较电位器测距、红外传感器测距要高。
附图说明
[0054]
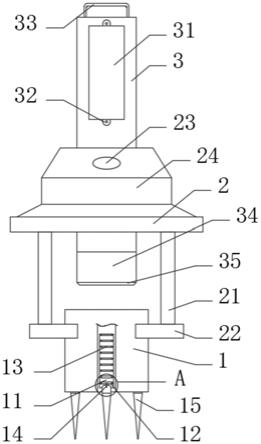
图1是本发明的一种用于电动手术台位移距离测量的检测装置处于初始位置的结构示意图;
[0055]
图2是本发明的一种用于电动手术台位移距离测量的检测装置发生位移后的结构示意图;
[0056]
图3是本发明的一种用于电动手术台位移距离测量的检测装置的微控制器的处理流程图。
具体实施方式
[0057]
现结合附图和实例对本发明作进一步的描述。
[0058]
如图1和2所示,本发明提供了一种用于电动手术台位移距离测量的检测装置,该装置安装在电动手术台上,用于实时监测电动手术台的位移距离,便于及时调整电动手术台的位置。
[0059]
该装置包括:水平距离采集组件和竖直距离采集组件和微控制器;
[0060]
水平距离采集组件和竖直距离采集组件均固定安装在电动手术台上,微控制器分别与距水平距离采集组件和竖直距离采集组件进行通信连接;
[0061]
所述水平距离采集组件,用于实时采集所需要水平方向移动的水平距离;
[0062]
具体地,所述水平距离采集组件包括:水平遮挡件和水平距离传感器;
[0063]
水平遮挡件与水平距离传感器位于同一水平方向上,且水平遮挡件位于水平距离传感器正前方;
[0064]
所述水平距离传感器为tof传感器,用于实时发射和接收水平激光信号。
[0065]
其中,所述水平距离传感器包括:水平发射模块、水平接收模块和水平数据处理模块;
[0066]
所述水平发射模块,用于实时发射水平激光信号;
[0067]
所述水平接收模块,用于实时接收水平激光信号;
[0068]
所述水平数据处理模块,用于根据水平激光信号从发射到接收在空气中传播的时
间t1和激光的传播速度c,得到水平距离d1:
[0069][0070]
所述竖直距离采集组件,用于实时采集所需要竖直方向移动的纵向距离;
[0071]
具体地,所述竖直距离采集组件包括:竖直遮挡件和竖直距离传感器;
[0072]
竖直遮挡件与竖直距离传感器位于同一竖直方向上,且竖直遮挡件位于竖直距离传感器的正下方;
[0073]
所述竖直距离传感器为tof(time of flight,飞行时间)传感器,用于实时发射和接收竖直激光信号。
[0074]
其中,所述竖直距离传感器包括:竖直发射模块、竖直接收模块和竖直数据处理模块;
[0075]
所述竖直发射模块,用于实时发射竖直激光信号;
[0076]
所述竖直接收模块,用于实时接收竖直激光信号;
[0077]
所述竖直数据处理模块,用于根据竖直激光信号从发射到接收在空气中传播的时间t2和激光的传播速度c,得到水平距离d2:
[0078][0079]
所述微控制器,用于分别从水平距离采集组件和竖直距离采集组件读取对应的距离,并结合对应的偏移值,获得对应的位移距离;根据获得的对应的位移距离,控制电动手术床升降或平移。
[0080]
其中,所述微控制器为mcu(microcontroller unit,微控制单元),在本实施例中,mcu和tof传感器之间通过通信接口进行通信连接。
[0081]
具体地,从水平距离传感器中读取水平距离,记为l1;并结合偏移值l01,计算位移距离lout1:
[0082]
lout1=l1
–
l01
[0083]
如图2所示,根据获得的位移距离lout1,控制电动手术床平移;
[0084]
从竖直距离传感器中读取竖直距离,记为l2;并结合偏移值l02,计算位移距离lout2:
[0085]
lout2=l2
–
l02
[0086]
如图2所示,根据获得的位移距离lout2,控制电动手术床升降。
[0087]
如图3所示,具体过程如下:
[0088]
步骤1)通过串行通信,设定tof传感器校准值,初始化tof传感器;
[0089]
步骤2)设定tof传感器测量间隔,开启测量;
[0090]
步骤3)进入等待状态,等待测量结束;
[0091]
步骤4)测量结束,读取对应的测量值,记为水平距离l1或竖直距离l2;
[0092]
步骤5)结合偏移值l01或l02,计算得出对应的水平位移距离lout1=l1
–
l01或竖直移位距离lout2=l2
–
l02;
[0093]
其中,偏移值l01为手术台水平位移到中心位置后,水平距离传感器与水平遮挡件之间的距离值;偏移值l02为手术台竖直位移到最低后,竖直距离传感器与竖直遮挡件之间的距离值。
[0094]
步骤6)重复进入步骤3)-5),实时获取不同的水平位移距离或竖直位移距离。
[0095]
本发明还提供了一种用于电动手术台位移距离测量的检测方法,该方法包括:
[0096]
水平距离采集组件实时采集所需要水平方向移动的水平距离;
[0097]
竖直距离采集组件实时采集所需要竖直方向移动的纵向距离;
[0098]
微控制器分别从水平距离采集组件和竖直距离采集组件读取对应的距离,并结合对应的偏移值,获得对应的位移距离;根据获得的对应的位移距离,控制电动手术床平移或升降。
[0099]
具体地,从水平距离传感器中读取水平距离,记为l1;并结合偏移值l01,计算位移距离lout1:
[0100]
lout1=l1
–
l01
[0101]
根据获得的位移距离lout1,控制电动手术床平移;
[0102]
从竖直距离传感器中读取竖直距离,记为l2;并结合偏移值l02,计算位移距离lout2:
[0103]
lout2=l2
–
l02
[0104]
根据获得的位移距离lout2,控制电动手术床升降。
[0105]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。