1.本发明属于三维力传感器三维力标定领域,具体涉及一种三维力传感器三维力加载标定装置及方法。
背景技术:
2.三维力传感器可以感知空间三维力传感器,在日常生活中有广泛的应用前景。柔性化更拓展了它的应用范围,可以使其很好贴合在一些复杂的曲面完成三维力的检测,为智能制造、人机交互等领域的力觉信息感知提供三维力信息的支持,可以广泛地应用在医疗、机器人、工业自动化中。
3.三维力传感器一般具有一个传力凸台,实现将三维力传递给下方力敏感单元,实现三维力测量的目的。由于在制造过程中敏感材料不均匀、组装等环节不够精确,都会使得制备出的三维力传感器之间特性差别较大,不能直接投入使用,需要对每一个传感器进行标定与校准,因此校准效率直接影响传感器的生产效率。三维力传感器校准阶段的三维力的加载与标定是其重要的过程,如何实现三维力的方便加载直接影响传感器的校准效率。现有的三维力施加与标定装置多采用电动三维运动位移台向传感器施加三维力。系统相对来说较为复杂与庞大,校准过程较为繁琐,对于大量校准效率不高。
技术实现要素:
4.本发明的目的在于提供一种三维力传感器三维力加载标定装置及方法,以克服现有技术的不足,本发明通过一个竖直方向移动的力加载杆与不同角度的加载台结合,实现对三维力传感器的不同方向与大小的三维力的加载及标定,相对于已公开的三维力加载与标定装置操作简单,不要复杂的校准装置,成本低。
5.一种三维力传感器三维力加载标定装置,包括力加载杆、直线轴承、斜台、限位板、支架;
6.所述直线轴承安装在支架的上方,力加载杆与直线轴承同轴心配合,可上下移动;
7.所述斜台的斜面上安装有三维力传感器,传感器与竖直方向夹角为斜台的倾斜角θ;
8.所述限位板具有一个平面,被安装在支架上,力加载杆也具有一个竖直的平面,其平面与力加载杆的中间部位的平面平行并保持微小的距离,从而限制力加载杆只能沿轴向上下移动,不发生转动;
9.所述力加载杆底端为一个与斜台相同角度大小的斜面或一条边或者一个点,当为斜面时,该斜面与斜台的斜面平行,当为一条边时,该边与斜面平行且为水平方向。
10.所述的三维力传感器三维力加载标定装置的测量原理:在力加载杆上放置砝码,直线轴承和限位板限制了力加载杆只能竖直向下移动,因此会向三维力传感器施加一个竖直方向的力,施加力的大小f为砝码与力加载杆的质量和,该力作用在装在斜台上的三维力传感器上,相对于三维力传感器的坐标系来说为空间中的三维力,可分解为法向力和切向
力,法向力即垂直于三维力传感器表面方向的力,切向力即沿三维力传感器表面方向上的力,通过调整施加砝码的重量以及斜台的角度即可调整施加三维力的大小和方向。
11.所述的力加载杆为质量轻,刚度大的材料制成。
12.所述斜台的斜面可以与重力方向呈任意角度θ,通过调整角度θ调整施加三维力的角度。
13.所述装置通过控制放在力加载杆上的砝码的重量实现所施加三维力大小的控制。
14.本发明具有如下有益效果:
15.本发明提出了一种三维力传感器三维力加载标定装置,包括力加载杆、直线轴承、斜台、限位板、支架;在力加载杆穿过直线轴承,直线轴承被竖直固定在支架上,在力加载杆上放置砝码,直线轴承和限位板限制了力加载杆只能竖直向下移动,因此力加载杆会向三维力传感器施加一个竖直方向的力,施加力的大小f为砝码与力加载杆的质量和,该力作用在装在斜台上的传感器上,相对于传感器的坐标系来说为空间中的三维力,可分解为法向力和切向力,通过调整施加砝码的重量以及斜台的角度即可调整施加三维力的大小和方向。本发明三维力传感器三维力加载及标定装置,以施加砝码的质量作为所施加三维力大小的控制量,以斜台上斜面与竖直方向的夹角作为所施加三维力方向的控制量,可以对三维力传感器很方便地实现不同角度与大小的三维力的加载与标定作业,避免了复杂的三维力加载与标定的装置,操作简便,测试成本低。
附图说明
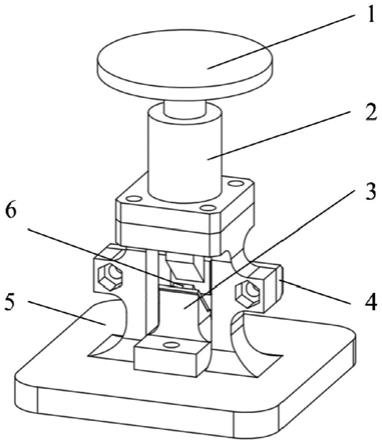
16.图1为本发明实施例中标定装置的立体图。
17.图2为本发明实施例中标定装置的后视图。
18.图3为本发明实施例中标定装置的剖视图。
19.图4为本发明实施例中标定装置的三维力施加原理。
20.图中,1-力加载杆,2-直线轴承,3-加载台,4-限位板,5-支架,6-三维力传感器。
具体实施方式
21.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
22.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
23.本发明公开的一种三维力传感器三维力加载标定装置,测量原理为,在力加载杆
上放置砝码,直线轴承和限位板限制了力加载杆只能竖直向下移动,因此会向三维力传感器施加一个竖直方向的力,施加力的大小f为砝码与力加载杆的质量和,该力作用在装在加载台上的传感器上,相对于传感器的坐标系来说为空间中的三维力,可分解为法向力和切向力,通过调整施加砝码的重量以及加载台的角度即可调整施加三维力的大小和方向。
24.如图1所示,其包括力加载杆1、直线轴承2、加载台3、限位板4、支架5;
25.直线轴承2安装在支架5的上方,力加载杆1与直线轴承2同轴心配合,可上下移动;加载台3的斜面上安装有三维力传感器6,传感器与竖直方向夹角为加载台的倾斜角θ;加载台3上端设有限位台,加载台3上的限位台高度小于三维力传感器6下端的限位厚度
26.所述限位板4具有一个平面,被安装在支架5上,力加载杆1也具有一个竖直的平面,其平面与力加载杆1的中间部位的平面平行并保持微小的距离,从而限制力加载杆1只能沿轴向上下移动,不发生转动;
27.所述力加载杆1底端为一个与加载台相同角度大小的斜面,该斜面与加载台的斜面平行。
28.所述装置的测量原理为,在力加载杆1上放置砝码,直线轴承2和限位板4限制了力加载杆1只能竖直向下移动,因此会向三维力传感器6施加一个竖直方向的力,施加力的大小f为砝码与力加载杆1的质量和,该力作用在装在加载台上的传感器上,相对于传感器的坐标系来说为空间中的三维力,可分解为法向力和切向力,通过调整施加砝码的重量以及加载台3的角度即可调整施加三维力的大小和方向。
29.所述的力加载杆1、加载台3和支架5均为abs材料经3d打印制造而成。
30.所述加载台3的斜面可以与重力方向呈任意角度θ,通过调整角度θ调整施加三维力的角度。
31.所述支架5上设置有螺栓孔,为适用不同重力方向上的角度,加载台3可以模块化,设置不同的安装角度,适用于不同倾斜角度的待测三维力传感器的安装,加载台3底部设置螺纹孔,加载台3通过螺栓固定于支架5上,螺栓穿过支架5的螺栓孔与加载台3底部的螺纹孔连接。
32.所述装置通过控制放在力加载杆1上的砝码的重量实现所施加三维力大小的控制。
33.本发明通过一个竖直方向移动的力加载杆与不同倾斜角度的斜台结合,实现对柔性三维力传感器的不同方向与大小的三维力的加载及标定,通过控制放置在力加载杆上的砝码的重量与斜台上斜面与竖直方向的角度即可实现对柔性三维力传感器施加三维力的大小与方向的控制。本发明结构简单,操作方便,结合简单的砝码即可对三维力传感器进行三维力的加载与标定,使用便捷,成本低。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。