技术特征:
1.一种基于视觉引导的机械臂运动规划与控制方法,其特征在于,包括:步骤s1:系统通过人机交互接收到任务指令后开始工作;步骤s2:视觉模块与机械臂模块反馈当前时刻环境信息与机械臂状态,两者同时进行;步骤s3:判断机械臂当前位姿是否到达目标位姿,并规划出一条运动轨迹控制机械臂到达目标位姿。2.根据权利要求1所述的基于视觉引导的机械臂运动规划与控制方法,其特征在于,所述步骤s3判断机械臂当前位姿是否到达目标位姿包括:若机械臂当前位姿已经到达目标位姿,则工作流程结束,该任务执行完成;若机械臂当前位姿并未到达目标位姿,则一直执行如下循环:智能规划与控制模块根据环境信息与机械臂状态规划出下一时刻机械臂位姿,并控制机械臂到达该位姿。3.根据权利要求2所述的基于视觉引导的机械臂运动规划与控制方法,其特征在于,所述规划机械臂下一时刻位姿并控制机械臂到达包括:1)目标速度求解:目标位姿x
goal
由视觉模块通过三维点云匹配与图像分割技术获得,目标速度求解由如下分段函数实现:0 d≤δ上式中,v
goal
表示智能规划与控制模块根据目标位姿生成的目标速度;d表示目标位姿与机械臂当前位姿的距离,δ表示目标位姿与机械臂当前位姿距离的阈值;当距离不大于距离阈值时,目标速度为零,当距离大于阈值时,再次判断当前目标速度的值,当目标速度大于目标速度阈值v
goal_max
时,目标速度等于该速度阈值,当目标速度不大于该速度阈值时,目标速度是一个与时间有关的线性函数,其中,a表示加速度,方向指向目标位姿,t表示时间。4.根据权利要求3所述的基于视觉引导的机械臂运动规划与控制方法,其特征在于,所述规划机械臂下一时刻位姿并控制机械臂到达还包括:2)位姿偏差补偿速度求解:位姿偏差补偿速度的公式为:上式中,v
err
表示由位姿偏差引起的位姿偏差补偿速度;目标位姿x
goal
由视觉模块通过三维点云匹配与图像分割技术获得,x
fdb
表示机械臂当前状态实际位姿;机械臂当前位姿由正向运动学根据机械臂模块反馈的关节位置计算得到;在计算位姿偏差补偿速度时考虑目标位姿与机械臂末端当前位姿的距离d与其阈值δ之间的关系,当距离过大时,位姿偏差补偿速度为零,当距离较近,即快接近目标位姿时,根据上述公式得到补偿速度。5.根据权利要求4所述的基于视觉引导的机械臂运动规划与控制方法,其特征在于,所述规划机械臂下一时刻位姿并控制机械臂到达还包括:3)避障补偿速度求解:
在机械臂末端周围设置障碍检测空间,在该空间内给每个障碍物设置势力场,即引力场与斥力场,在机械臂靠近障碍物时,避免机械臂与障碍物发生碰撞,最终在目标速度与位姿偏差补偿速度的作用下,机械臂末端到达目标位姿。6.根据权利要求5所述的基于视觉引导的机械臂运动规划与控制方法,其特征在于,在考虑避障补偿速度基础上机械臂笛卡尔空间内的目标速度解算,方法如下:a.将机械臂末端为圆心,d
o
为半径的球形空间设置为障碍检测空间,在解算避障补偿速度时仅考虑障碍检测空间内的障碍网格;b.设置障碍网格的势力场函数为u(q)=u
att
(q) u
rep
(q);其中,u
att
(q)为引力场函数,u
rep
(q)为势力场函数;c.设置引力场函数具体表达式:其中,k
att
为引力增益,d(x
goal
,x
fdb
)为目标位姿与当前位姿的距离;d.设置斥力场函数具体表达式:其中,k
rep
为斥力增益,d
m
(q)为障碍物与机械臂末端的距离,d
o
为障碍检测空间半径;e.利用梯度下降法求得避障补偿速度:其中,v
u
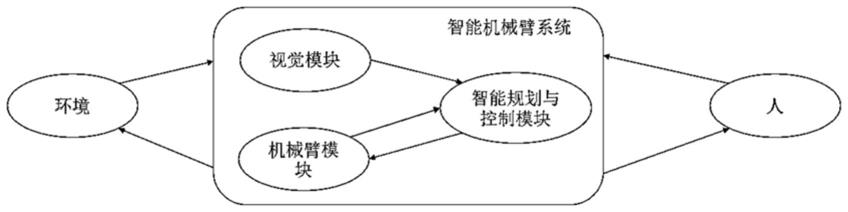
表示由障碍物引起的补偿速度;表示各障碍物与机械臂末端距离对机械臂各关节的微分。7.根据权利要求6所述的基于视觉引导的机械臂运动规划与控制方法,其特征在于,所述步骤s3根据计算出的目标速度、位姿偏差补偿速度及避障补偿速度,再根据机械臂实际位姿与目标位姿,不断迭代求解,最终规划出一条安全的运动轨迹并控制机械臂到达目标位姿。8.一种基于视觉引导的机械臂运动规划与控制系统,其特征在于,基于权利要求1-7中任意一项所述的基于视觉引导的机械臂运动规划与控制方法,包括:机械臂模块:包括机械臂本体和夹爪,保证机械臂完成抓取或转移物体在内的相关操作;视觉模块:由深度相机构成,提供目标平面与立体的点云数据,并根据这些数据获取目标特征点;智能规划与控制模块:根据视觉模块反馈的环境信息与机械臂模块反馈的机械臂状态,实时规划到达目标位置的运动轨迹;其中,智能规划与控制模块实时接收视觉模块与机械臂模块反馈的状态信息,经过运算处理后发送机械臂运动信息至机械臂模块。9.一种存储有计算机程序的计算机可读存储介质,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本发明提供了一种基于视觉引导的机械臂运动规划与控制方法、系统及介质,涉及机器人技术领域,系统包括:机械臂模块、视觉模块及智能规划与控制模块;其中,智能规划与控制模块实时接收视觉模块与机械臂模块反馈的状态信息,经过运算处理后发送机械臂运动信息至机械臂模块;方法包括:步骤S1:系统通过人机交互接收到任务指令后开始工作;步骤S2:视觉模块与机械臂模块反馈当前时刻环境信息与机械臂状态,两者同时进行;步骤S3:判断机械臂当前位姿是否到达目标位姿,并规划出一条运动轨迹控制机械臂到达目标位姿。本发明能够保证达到目标位置的前提下,动态避开运动过程中的障碍物,提升机械臂运动过程中的安全性。提升机械臂运动过程中的安全性。提升机械臂运动过程中的安全性。
技术研发人员:廖志祥 郭震
受保护的技术使用者:上海景吾酷租科技发展有限公司
技术研发日:2022.01.12
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。