可操纵导管手柄设计
1.相关申请的交叉引用
2.本技术要求于2019年8月20日提交的临时专利申请号62/889,311的优先权,其通过引用整体并入本文。
技术领域
3.本发明涉及导管手柄(handle)和使用该导管手柄的方法。更具体地,本发明涉及具有可偏转远侧部分的导管手柄和使用方法。
背景技术:
4.操纵机构用于在患者的身体内的期望位置或方位操纵或引导医疗器械,例如耦合到导管手柄的导管。导管可以用于医疗程序,包括向患者组织受控地递送治疗能量。导管的端部部分的操纵或偏转可以在无需整个导管手柄的实质移动的情况下使得能够将能量递送到患者组织的目标位置。
技术实现要素:
5.在示例1中,一种装置包括:壳体;导管轴,该导管轴具有近侧部分、远侧部分和在近侧部分和远侧部分之间延伸的中间部分;致动器,该致动器耦合到导管轴,并且被配置为相对于壳体纵向移动,并响应于由用户施加的力纵向移动导管轴;活塞组件,该活塞组件布置在壳体内,并且被配置为接收致动器并允许致动器相对于壳体纵向移动;以及一个或多个线,该一个或多个线包括附接到导管轴的远侧部分的远端和近侧部分,该近侧部分配置为响应致动器的纵向移动接合活塞组件的端盖,以实现导管轴的远侧部分的弯曲。
6.在示例2中,进一步参照示例1的装置,该装置还包括滑轮组件,该滑轮组件布置在壳体内并且被配置为响应于用户施加在致动器上的力而与致动器一起平移。
7.在示例3中,进一步参照示例1至2中任一个的装置,一个或多个线围绕滑轮组件布置。
8.在示例4中,进一步参照示例1至3中任一个的装置,一个或多个线包括第一线和第二线,并且还包括附接到第一线近端的第一锚定件(anchor)和附接到第二线近端的第二锚定件。
9.在示例5中,进一步参照示例4的装置,第一锚定件被配置为响应于致动器的移动而接合活塞组件的端盖。
10.在示例6中,进一步参照示例5的装置,活塞组件的端盖包括第一凹穴(pocket)和第二凹穴,并且第一锚定件被配置为接合活塞组件的第一凹穴,并且第二锚定件被配置为响应于致动器的移动接合活塞组件的第二凹穴。
11.在示例7中,进一步参照示例6的装置,致动器被配置为响应于致动器相对于壳体在远侧方向上的移动而在第一线上产生张力,以将第一锚定件与第一凹穴接合。
12.在示例8中,进一步参照示例7的装置,致动器被配置为在第一线上施加张力,以使
导管轴的远侧部分在第一弯曲方向上弯曲。
13.在示例9中,进一步参照示例8的装置,致动器被配置为响应于致动器相对于壳体从远侧位置在近侧方向上的移动而减小第一线上的张力。
14.在示例10中,进一步参照示例9的装置,致动器被配置为响应于致动器相对于壳体从远侧位置在近侧方向上的移动而使导管轴的远侧部分弯曲到中性位置(neutral position)。
15.在示例11中,进一步参照示例6至10中任一个的装置,致动器包括相对于壳体的中性位置,并且响应于致动器处于中性位置,第一线和第二线缺乏张力。
16.在示例12中,进一步参照示例11的装置,致动器被配置为响应于致动器相对于中性位置在近侧方向上的移动而在第二线上产生张力,以将第二锚定件与第二凹穴接合。
17.在示例13中,进一步参照示例12的装置,致动器被配置为在第二线上施加张力,以使导管轴的远侧部分在与导管轴的远侧部分的第一弯曲方向相反的第二弯曲方向上弯曲。
18.在示例14中,进一步参照示例1至10中任一个的装置,致动器和活塞组件被配置为在没有由用户施加的力的情况下保持导管轴的远侧部分的位置。
19.在示例15中,进一步参照示例14的装置,该装置还包括o形环,该o形环被配置为在致动器和活塞组件之间施加保持力。
20.在示例16中,一种可操纵导管手柄装置包括:壳体;导管轴,该导管轴包括近侧部分、远侧部分和在近侧部分和远侧部分之间延伸的中间部分;致动器,该致动器耦合到导管轴,并且被配置为相对于壳体纵向移动,并响应于由用户施加的力纵向移动导管轴;活塞组件,该活塞组件布置在壳体内,并且被配置为接收致动器并允许致动器相对于壳体纵向移动;以及两个操纵线,该两个操纵线各自包括附接到导管轴的远侧部分的远端和近侧部分,该近侧部分配置为响应致动器的纵向移动接合活塞组件的端盖并且改变操纵线上的张力,以实现导管轴的远侧部分的弯曲。
21.在示例17中,进一步参照示例16的装置,可操纵导管手柄装置还包括滑轮组件,该滑轮组件布置在壳体内并构造成响应于用户施加在致动器上的力而在与致动器共同的方向上平移。
22.在示例18中,进一步参照示例17的装置,滑轮组件通过一个或多个支撑件耦合到活塞组件。
23.在示例19中,进一步参照示例18的装置,两个操纵线中的至少一个围绕滑轮组件布置。
24.在示例20中,进一步参照示例19的装置,两个操纵线包括第一线和第二线,并且还包括附接到第一线的近侧部分的第一锚定件和附接到第二线的近端的第二锚定件。
25.在示例21中,进一步参照示例20的装置,第一锚定件被配置为响应于致动器的移动而接合活塞组件的端盖。
26.在示例22中,进一步参照示例21的装置,致动器被配置为响应于致动器相对于壳体在远侧方向上的移动而在第一线上产生张力,以将第一锚定件与端盖接合,并使导管轴的远侧部分在第一弯曲方向上弯曲。
27.在示例23中,进一步参照示例22的装置,致动器被配置为响应于致动器相对于壳体从远侧位置在近侧方向上的移动而减小第一线上的张力。
28.在示例24中,进一步参照示例23的装置,致动器被配置为响应于致动器相对于壳体从远侧位置在近侧方向上的移动而将导管轴的远侧部分弯曲到中性位置。
29.在示例25中,一种可操纵导管手柄装置包括:壳体;导管轴,该导管轴包括近侧部分、远侧部分和在近侧部分和远侧部分之间延伸的中间部分;致动器,该致动器耦合到导管轴,并且被配置为相对于壳体纵向移动,并响应于由用户施加的力纵向移动导管轴;活塞组件,该活塞组件布置在壳体内,并且被配置为接收致动器并允许致动器相对于壳体纵向移动;滑轮组件,该滑轮组件布置在活塞组件远侧;以及两个操纵线,该两个操纵线围绕滑轮组件布置并且各自包括附接到导管轴的远侧部分的远端和近侧部分处的锚定件,该锚定件被配置为成响应致动器的纵向移动接合活塞组件并改变操纵线上的张力,以实现导管轴的远侧部分在第一方向上的弯曲。
30.在示例26中,进一步参照示例25的装置,致动器被配置为响应于相对于壳体的中性位置和相对于壳体的远侧位置之间的移动来改变导管轴的远侧部分上的操纵的量。
31.在示例27中,进一步参照示例26的装置,致动器被配置为响应于致动器朝向远侧位置的移动而在两个操纵线中的一个上产生张力,以将锚定件与活塞组件接合,从而使导管轴的远侧部分在第一弯曲方向上弯曲。
32.在示例28中,进一步参照示例27的装置,致动器被配置为响应于致动器从远侧位置朝向中性位置的移动,将导管轴的远侧部分弯曲到中性位置。
33.在示例29中,进一步参照示例28的装置,致动器还包括相对于壳体的近侧位置,并且致动器被配置为响应于致动器从中性位置朝向近侧位置的移动,使导管轴的远侧部分在与导管轴的远侧部分的第一弯曲方向相反的第二弯曲方向上弯曲。
34.在示例30中,进一步参照示例29的装置,致动器被配置为响应于致动器从近侧位置朝向中性位置的移动,将导管轴的远侧部分弯曲到中性位置。
35.在示例31中,进一步参照示例26的装置,致动器和活塞组件被配置为在没有由用户施加的力的情况下保持导管轴的远侧部分的位置。
36.在示例32中,进一步参照示例31的装置,该装置还包括o形环,该o形环被配置为在致动器和活塞组件之间施加保持力。
37.在示例33中,一种用于操纵导管轴的方法包括:将导管手柄的导管轴布置在患者体内的目标方位处,该导管轴具有近侧部分、远侧部分和在近侧部分和远侧部分之间延伸的中间部分,该导管手柄包括:壳体;致动器,该致动器耦合到导管轴;活塞组件,该活塞组件布置在壳体内,并且被配置为接收致动器并允许致动器相对于壳体纵向移动;滑轮组件,该滑轮组件布置在活塞组件远侧;以及第一操纵线和第二操纵线,该第一操纵线和第二操纵线布置在滑轮组件周围并且各自包括附接到导管轴的远侧部分的远端和近侧部分处的锚定件;相对于壳体在远侧方向上移动致动器,使得在附接到导管轴的第一线的近端处的第一锚定件接合第一凹穴,从而在第一线上产生张力;相对于壳体在近侧方向上移动致动器,使得第一锚定件背离第一凹穴移位,从而释放第一线上的张力;以及在近侧方向上进一步相对于壳体移动致动器,使得在附接到导管轴的第二线的近端处的第二锚定件接合第二凹穴,在第二线上产生张力。
38.在示例34中,进一步参照示例33的方法,第一线上的张力使导管轴的远侧部分在第一方向上弯曲,并且第二线上的张力使导管轴的远侧部分在与第一方向相反的方向上弯
曲。
39.在示例35中,进一步参照示例34的方法,滑轮组件被配置为响应于致动器的移动而在与致动器共同的方向上移动。
40.虽然公开了多个实施例,但是对于本领域的技术人员来说,从下面的详细描述中本发明的其他实施例将变得显而易见,下面的详细描述示出并描述了本文发明的说明性实施例。因此,附图和详细描述在本质上被认为是说明性的,而不是限制性的。
附图说明
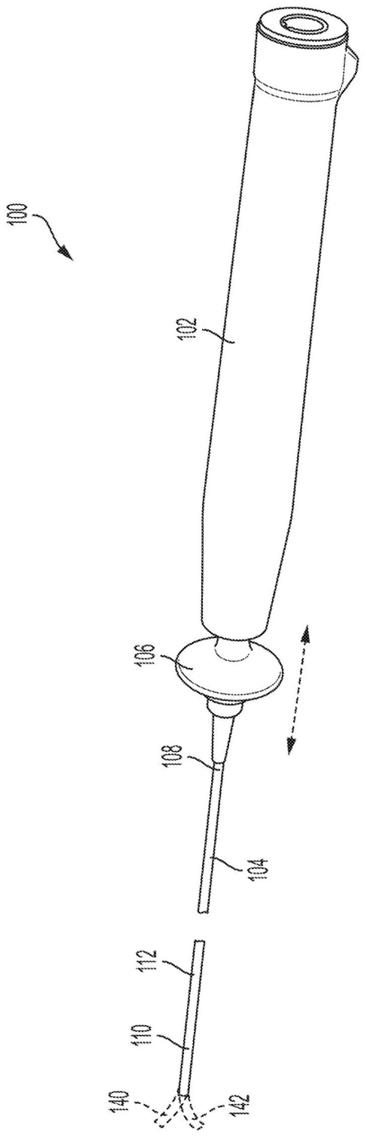
41.图1示出了根据本公开的各方面的示例导管手柄的图示。
42.图2示出了根据本公开的各方面的示例导管手柄的一部分的内部视图。
43.图3示出了根据本公开的各方面的示例导管手柄的一部分的另一内部视图。
44.图4a示出了根据本公开的各方面的示例导管手柄的局部内部视图,其中致动器处于中性位置。
45.图4b示出了图4a中示出的导管手柄的一部分的特写视图。
46.图4c示出了根据本公开的各方面的图4a至图4b中示出的导管手柄的局部内部视图,其中致动器处于远侧位置。
47.图4d示出了图4c中示出的导管手柄的一部分的特写视图。
48.图4e示出了根据本公开的各方面的图4a至图4d中示出的导管手柄的局部内部视图,其中致动器处于近侧位置。
49.图4f示出了图4e中示出的导管手柄的一部分的特写视图。
50.图5示出了根据本公开的各方面的具有保持力o形环的示例导管手柄的局部内部视图。
51.虽然本发明适用于各种修改和替代性形式,但是具体实施例已经通过附图中的示例示出,并且在下面详细描述。然而,目的不是将本发明限制于所描述的特定实施例。相反,本发明旨在覆盖落入由所附权利要求限定的本发明的范围内的所有修改、等同物和替代性方案。
具体实施方式
52.本公开的各方面针对包括可操纵、可偏转或可弯曲的导管主体的装置、系统和方法。如下文进一步详细讨论的导管手柄可以被配置为在一个或多个方向上弯曲或操纵从导管手柄延伸的导管轴的远侧部分。在某些情况下,导管手柄可包括致动器,当由用户相对于导管手柄移动时,该致动器操纵或弯曲导管轴的远侧部分。远侧部分可以包括治疗元件(例如,用于递送消融能量的电极结构)。导管的远侧部分的弯曲可以使得能够将治疗能量递送到患者体内的目标组织区域。
53.图1示出了根据本公开的各方面的示例导管手柄100的图示,该导管手柄包括壳体102、导管轴104和致动器106。导管轴104包括近侧部分108、远侧部分110和在近侧部分108和远侧部分110之间延伸的中间部分112。
54.致动器106耦合到导管轴104,并且被配置为响应于由用户施加的力而相对于壳体102纵向移动。致动器106相对于壳体102的移动使导管轴104的远侧部分110在第一弯曲方
向140和第二弯曲方向142中的一个或两者上弯曲。在某些情况下,手柄100可以被配置为使导管轴104的远侧部分110仅在第一弯曲方向140或第二弯曲方向142中的一个上弯曲。
55.如所示出的那样,致动器106处于中性位置。当致动器106处于中性位置(例如,相对于壳体102的预设距离)时,导管轴104的远侧部分110未弯曲或未偏置。使致动器106相对于壳体102向远侧移动实现了导管轴104的远侧部分110在第一弯曲方向140或第二弯曲方向142中的一个上的弯曲。在使致动器106向远侧移动之后,致动器106向近侧的朝向中性位置返回的移动实现了导管轴104的远侧部分110从第一弯曲方向140或第二弯曲方向142中的一个到未弯曲或未偏置布置的弯曲。
56.在某些情况下,致动器106可能不会相对于中性位置相对于壳体102向近侧移动。在其他情况下,致动器106可以从中性位置相对于壳体102向近侧移动,而不弯曲导管轴104的远侧部分110。在这些情况中的每一个中,导管手柄100是单向的,并且实现了导管轴104的远侧部分110仅在第一弯曲方向140和第二弯曲方向142中的一个上的弯曲。
57.在其他情况下,致动器106可以相对于壳体102从中性位置向近侧移动,以实现导管轴104的远侧部分110在第一弯曲方向140或第二弯曲方向142中的一个上的弯曲。在这些情况下,使致动器106相对于中性位置向远侧移动实现了导管轴104的远侧部分110在第一弯曲方向140和第二弯曲方向142中的一个上的曲弯曲,并且使致动器106相对于中性位置向近侧移动实现了导管轴104的远侧部分110在第一弯曲方向140或第二弯曲方向142中的另一个上的弯曲。致动器相对于近侧或远侧位置朝向中性位置的移动将实现导管轴104的远侧部分110弯曲成未弯曲或未偏置布置。
58.操纵线(未示出)布置在导管轴104内,并且附接或耦合到远侧部分110的部分。如下面进一步详细描述的那样,致动器106与壳体102的各种内部部件(包括操纵线)的相互作用实现了一个或多个弯曲方向140、142,如下面进一步详细描述的那样。
59.图2示出了根据本公开的各方面的示例导管手柄200的一部分的内部视图。导管手柄200包括壳体202、导管轴204和致动器206。活塞组件214布置在壳体202内,并且被配置为接收致动器206并允许致动器206相对于壳体202纵向移动。如上参考图1所述,活塞组件214可以相对于壳体202向近侧和向远侧中的至少一个移动。此外,导管轴204可以附接、粘附或耦合到致动器206。因此,当用户移动致动器206时,导管轴204也与致动器206一起移动。
60.在某些情况下,导管手柄200还包括布置在壳体202内的滑轮组件224。滑轮组件224可以与一个或多个操纵线(未示出)相互作用,该一个或多个操纵线被布置为穿过活塞组件214的内部、致动器206的内部以及穿过导管轴204的内部。如上参考图1所述,一个或多个操纵线在其远端或其远端附近锚定或附接到导管轴204的内部。此外,一个或多个操纵线围绕滑轮组件224布置。如参考图3和图4a至图4f进一步详细描述的那样,邻近或靠近一个或多个操纵线被锚定或附接的地方的远侧部分可以通过致动器206的移动、通过导管轴204被附接到致动器206以及一个或多个操纵线上的张力而在一个或多个方向上弯曲。
61.图3示出了根据本公开的各方面的示例导管手柄300的一部分的另一内部视图。导管手柄300包括壳体302、导管轴(未示出)和致动器306。导管手柄300包括一个或多个线326、328。一个或多个线326、328包括附接到导管轴110的远侧部分(如上文远侧所述)的远端和被配置为响应于致动器306的纵向移动而接合活塞组件314的端盖322以实现导管轴104的远侧部分110的弯曲(如图1所示)的近端。
62.在一些情况下,两个线326、328中的至少一个围绕滑轮组件324布置。在其他情况下,两个线326、328围绕滑轮组件324布置。在一些情况下,一个或多个线326、328包括第一线326和第二线328。在其他情况下,一个或多个线326、328可以是一个连续的线。一个或多个线326、328还可以包括附接到第一线326的近端的第一锚定件330和附接到第二线328的近端的第二锚定件332。
63.第一锚定件330可以被配置为响应于致动器306的移动而接合活塞组件314的端盖322。在一些情况下,活塞组件314的端盖322包括第一凹穴334和第二凹穴336,并且第一锚定件330被配置为接合活塞组件314的第一凹穴334,并且第二锚定件332被配置为响应于致动器306的移动而接合活塞组件314的第二凹穴336。如下面参考图4a至图4f进一步详细描述的那样,通过活塞组件314内的致动器306的移动产生的线326、328上的张力实现了导管轴的远侧部分的弯曲。
64.图4a示出了根据本公开的各方面的示例导管手柄400的局部内部视图,其中致动器406处于中性位置。导管手柄400包括壳体402、导管轴404、致动器406和活塞组件414。导管轴404的近侧部分408可以耦合到致动器406,使得导管轴404响应于由用户施加的力而与致动器406一起移动。在一些情况下,当致动器406相对于壳体402处于中性位置时,第一线426和第二线428响应于致动器406处于中性位置而缺乏张力,并且导管轴410的远侧部分410不弯曲,如将在下面的图4b中更详细地讨论的那样。
65.在一些情况下,滑轮组件324布置在壳体302内。第一线426和第二线428与滑轮组件424相互作用并且可以围绕该滑轮组件布置。滑轮组件424可以通过支撑件438附接或耦合到致动器406。
66.图4b示出了图4a中示出的导管手柄400的一部分的特写视图。如所示出的那样,活塞组件414包括端盖422。线426、428可以被配置为响应于致动器406的纵向移动而接合活塞组件414的端盖422,以实现导管轴104的远侧部分410的弯曲(如图1所示)。端盖422包括凹穴434、436,这些凹穴可以与附接到或耦合到线426、428的锚定件430、432相互作用。凹穴434、436可以布置在端盖422的相对侧上,如图4b所示。在某些情况下,线426、428围绕滑轮组件424布置,使得相应的锚定件430、432响应于致动器406的移动接合凹穴434、436,如下面进一步详细描述的那样。
67.当致动器406处于中性位置时,锚定件430、432可能不与凹穴434、436接合。在这些情况下,线426、428上缺乏张力。在线426、428上没有张力的情况下,导管轴404的远侧部分410是未弯曲的或未偏置的。如下面进一步详细描述的那样,张力可以通过线426、428附接到导管轴404的远侧部分410的内部以及与锚定件430、432中的一个或多个与凹穴434、436接合产生。线426、428上的张力可以由于在致动器406的移动期间导管轴404的移动、由于线426、428的点而实现弯曲。
68.活塞组件414的端盖422和滑轮组件424之间的距离可以布置成使得当致动器406处于中性位置时,锚定件430、432中的两者不接合到它们相应的凹穴434、436中。在一些情况下,活塞组件414的端盖422和滑轮组件424之间的距离与致动器406向前和向后的行程量相关。在某些情况下,滑轮组件424的位置可以沿着支撑件438向远侧和近侧调节,以实现一个或两个操纵方向上的更多或更少的弯曲。此外,滑轮组件424的位置可被调节以提供额外的远侧行程以获得附加的铰接/弯曲。滑轮组件424可调性的距离可以允许定制弯曲和铰
接。
69.图4c示出了导管手柄400的局部内部视图,其中致动器406相对于图4a和图4b中的中性位置处于远侧位置。与中性位置相比,致动器406和壳体402之间的距离更大。在某些情况下,由于滑轮组件424和活塞组件406之间通过一个或多个支撑件438的耦合,滑轮组件424也可以与活塞组件406一起向远侧移动。
70.在一些情况下,当致动器406相对于壳体402在远侧方向上移动时,致动器406和活塞组件414之间的距离变大,而滑轮组件424和活塞组件414之间的距离变短。在一些情况下,当致动器406相对于壳体402处于远侧位置时,在第一线426上产生张力,而第二线428缺乏张力,并且导管轴404的远侧部分410在第一弯曲方向440上弯曲,如将在下面图4d中更详细地讨论的那样。随着致动器406向远侧移动,弯曲量增加。
71.图4d示出了图4c中示出的导管手柄400的一部分的特写视图。当致动器406相对于壳体402在远侧方向上移动时,滑轮组件424在耦合到致动器406时,与致动器406一起相对于壳体402在远侧方向上移动。随着滑轮组件424和活塞组件414之间的距离变短,第一锚定件430与第一凹穴434接合,从而在第一线426中产生张力。第一线426中的张力可以使导管轴404的远侧部分410在第一弯曲方向440上弯曲(如图4c所示)。
72.在一些情况下,当致动器406相对于壳体402在远侧方向上移动时,第二锚定件432相对于壳体402在远侧方向上并背离第二凹穴436移动,并且在第二线428上不产生张力。在其他情况下,致动器406和活塞组件414被配置为在没有由用户施加的力的情况下保持导管轴410的远侧部分的位置。
73.在一些情况下,致动器406被配置为响应于相对于壳体402的中性位置和相对于壳体402的远侧位置之间的相对移动来改变导管轴410的远侧部分上的操纵量。致动器406从壳体402移动的距离越大,导管轴404的远端410上的弯曲量就越大。在没有由用户施加在致动器406上的力的情况下,张力保持在第一线426上。结果,在没有由用户施加的力的情况下,保持导管轴404的远端410上的弯曲量。此外,致动器406被配置为响应于致动器406从远侧位置到中性位置的移动,朝向中性位置弯曲导管轴404的远侧部分410。随着致动器406从远侧位置向近侧移动,在第一线426上张力被释放,并且导管轴404的远端410上的弯曲量减小。
74.图4e示出了示例导管手柄的局部内部视图,其中致动器406相对于图4a和图4b中示出的中性位置处于近侧位置。在一些情况下,当致动器406相对于壳体402在近侧方向上移动时,致动器406和活塞组件414之间的距离变短。在致动器406耦合到滑轮组件424的情况下,随着滑轮组件424相对于壳体402在近侧方向上移动,滑轮组件424和活塞组件414之间的距离变长。在一些情况下,当致动器406相对于壳体402处于近侧位置时,在第二线428上产生张力,并且导管轴410的远侧部分在第二弯曲方向442上弯曲,如将在下面的图4f中更详细地讨论的那样。在一些情况下,第一曲线方向440与第二曲线方向442相反。
75.图4f示出了图4e中示出的导管手柄400的一部分的特写视图。当致动器406相对于壳体402在近侧方向上移动时,滑轮组件424在耦合到致动器406时与致动器406一起相对于壳体402在近侧方向上移动。随着滑轮组件424和活塞组件414之间的距离变得更长,第二锚定件432与第二凹穴436接合,从而在第二线428中产生张力。第二线428中的张力可以使导管轴410的远侧部分在第二弯曲方向442上弯曲。致动器406从壳体402移动的距离越大,导
管轴404的远端410上的弯曲量就越大。在没有由用户施加在致动器406上的力的情况下,张力保持在第二线426上,直到致动器406已经移动。结果,在没有由用户施加的力的情况下(例如,由于参照图5描述的o形环),保持导管轴404的远端410上的弯曲量。
76.在一些情况下,当致动器406相对于壳体402在近侧方向上移动时,第一锚定件430相对于壳体402在近侧方向上并背离第一凹穴434移动,并且在第一线426上不产生张力。如上所述,致动器406和活塞组件414被配置为在没有由用户施加的力的情况下保持导管轴410的远侧部分的位置。随着致动器406从近侧位置向远侧移动,第二线428上的张力被释放,并且导管轴404的远端410上的弯曲量减小。
77.在某些情况下,导管手柄400可以被配置为用于单向操纵而不是双向操纵。在这些情况下,致动器406可以被配置为相对于中性位置仅向远侧或仅向近侧移动,以使导管轴404的远侧部分410在一个方向上弯曲。线426、428中的一个也可以没有锚定件430、432中的一个,使得当致动器406在上面详述的方向中的一个上移动时不会产生张力。
78.图5示出了根据本公开的各方面的具有保持力o形环的示例导管手柄500的局部内部视图。导管手柄500包括壳体502、导管轴(未示出)、致动器506、活塞组件514和滑轮组件524,如上面详细描述的那样。o形环556可以被配置为在致动器506和活塞组件514之间施加保持力。
79.在某些情况下,o形环556与致动器506一起布置在活塞组件514内。o形环556可以提供保持力,使得需要该力来在活塞组件514内移动致动器506。可以调节o形环556的大小,以改变克服活塞组件514内的致动器506之间的摩擦所需的力的量。在某些情况下,滑轮组件524和活塞组件514之间的长度可以被调节为与线上的张力量相关。滑轮组件524和活塞组件514之间的更大的长度也可以调节由于线上更大的张力而移动致动器506所需的力。
80.在不脱离本发明的范围的情况下,可以对所讨论的示例性实施例进行各种修改和添加。例如,尽管上述实施例涉及特定特征,但是本发明的范围还包括具有特征的不同组合的实施例和不包括所有所描述的特征的实施例。因此,本发明的范围旨在旨在包涵落入权利要求及其所有等同物的范围内的所有这些替代性方案、修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。