1.本发明涉及感知对象物中的水分的状态的水分感知装置,例如,适合用于对路面上堆积的水、冰以及雪等的状态进行感知的情况。
背景技术:
2.以往,已知对路面的状态进行感知的路面感知装置。例如,在以下的专利文献1中,记载了一种路面状态感知装置,向路面的被感知区域照射照明光,基于其反射光,判定冰、水等被检测物是否存在于被感知区域。在该装置中,作为照明光,相互波长不同的检测光和参照光被依次切换并向被感知区域照射。此外,与各光的切换同步地,对各光的反射光进行受光并生成电信号。然后,对这些电信号进行比较运算,基于其运算结果,判定水、冰等被感知物是否存在于被感知区域。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2001-216592号公报
技术实现要素:
[0006]-发明要解决的课题-[0007]
在上述专利文献1的结构中,照明光和反射光分别通过各个光学系统,在相互不同的方向上分别被照射以及受光。因此,需要根据路面状态感知装置与感知区域的距离,调整照明光的照射角度与反射光的受光角度。上述那样的调整作业极其繁杂。
[0008]
鉴于该课题,本发明的目的在于,提供一种在不进行繁琐的调整作业的情况下能够感知对象物中的水分的状态的水分感知装置。
[0009]-解决课题的手段-[0010]
本发明的主要方式所涉及的水分感知装置具备:光源部;投射光学系统,将从所述光源部出射的照明光向对象物投射;光检测器,对被所述对象物反射的所述照明光的反射光进行受光;受光光学系统,使所述反射光聚光于所述光检测器;和光学元件,使所述投射光学系统的光轴和所述受光光学系统的光轴在所述对象物侧的范围相互对齐。
[0011]
根据本方式所涉及的水分感知装置,投射光学系统的光轴和所述受光光学系统的光轴在所述对象物侧的范围内相互对齐,因此能够通过受光光学系统使被对象物反射的反射光之中在对齐的光轴逆行的反射光聚光于光检测器。因此,不需要根据装置与对象物的距离来调整照明光和反射光相对于对象物的角度,即使不进行上述那样的调整,也能够通过光检测器来对来自对象物的反射光适当地进行受光。
[0012]-发明效果-[0013]
如以上那样,根据本发明,能够提供一种在不进行繁琐的调整作业的情况下能够感知对象物中的水分的状态的水分感知装置。
[0014]
本发明的效果乃至意义通过以下所示的实施方式的说明而更加明确。但是,以下
所示的实施方式仅仅是将本发明实施化时的一个示例,本发明并不限制于以下的实施方式所述的方式。
附图说明
[0015]
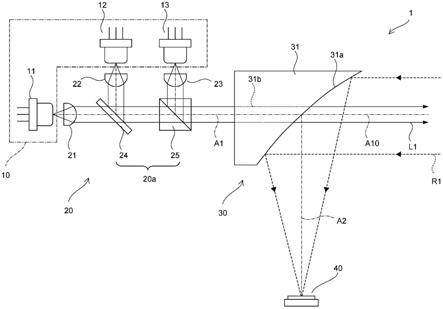
图1是表示实施方式所涉及的水分感知装置的光学系统的结构的图。
[0016]
图2的(a)、(b)分别是表示实施方式所涉及的光学元件的结构的立体图以及侧视图。
[0017]
图3是表示实施方式所涉及的水分感知装置的电路部的结构的框图。
[0018]
图4是表示实施方式所涉及的水与冰中的光的吸收系数的图表。
[0019]
图5是表示实施方式所涉及的水分感知装置的判定处理的流程图。
[0020]
图6的(a)是示意性地表示实施方式所涉及的水分感知装置的设置状态的一个例子的图。图6的(b)是表示实施方式所涉及的光相对于水面的入射角度与反射率的关系的图表。
[0021]
图7是表示实施方式所涉及的激光的安全基准满足1类的条件的脉冲宽度与峰值功率的关系的图表。
[0022]
图8是示意性地表示实施方式所涉及的路面信息分发系统的结构的图。
[0023]
图9是表示变更例1所涉及的水分感知装置的光学系统的结构的图。
[0024]
图10的(a)是表示通过模拟变更例1所涉及的利用聚光透镜来使反射光聚光于光检测器的情况下的反射光的聚光状态从而求取的模拟结果的图。图10的(b)是表示通过模拟实施方式所涉及的利用抛物面形状的反射面来使反射光聚光于光检测器的情况下的反射光的聚光状态从而求取的模拟结果的图。
[0025]
图11是表示变更例2所涉及的水分感知装置的光学系统的结构的图。
[0026]
图12是表示变更例2所涉及的水分感知装置的光学系统的其他结构的图。
[0027]
图13是表示变更例3所涉及的水分感知装置的光学系统的结构的图。
[0028]
其中,附图仅仅用于说明,并不限定本发明的范围。
具体实施方式
[0029]
以下,参考附图来对本发明的实施方式进行说明。在本实施方式中,本发明被应用于感知在作为对象物的路面堆积的水分(水、雪、冰等)的水分感知装置。
[0030]
《光学系统的结构》
[0031]
图1是表示水分感知装置1的光学系统的结构的图。
[0032]
水分感知装置1具备:光源部10、投射光学系统20、受光光学系统30、光检测器40。光源部10出射波长相互不同的多个照明光l1。投射光学系统20将从光源部10出射的照明光l1投射于路面。光检测器40对在路面反射的照明光l1的反射光r1进行受光。
[0033]
光源部10具备波长相互不同的3个光源11、12、13。光源11、12、13例如是半导体激光器等的激光源。光源11、12、13也可以包含led、附带通过特定波长的滤光器的白色光源。光源11出射波长980nm(以下,称为“参考波长”)的近红外光。光源12出射波长1450nm(以下,称为“吸收波长1”)的近红外光。光源13出射波长1550nm(以下,称为“吸收波长2”)的近红外光。
[0034]
光源12、13向同一方向出射照明光l1,光源11向与光源12、13的出射方向正交的方向照射照明光l1。光源11、12、13的出射光轴被包含于同一平面。即,光源11的出射光轴与光源12、13的出射光轴相互正交。
[0035]
投射光学系统20具备:准直透镜21、22、23、分色镜24、偏振分束器(以下,称为“pbs”)25。准直透镜21、22、23分别将从光源11、12、13出射的照明光l1转换为平行光。分色镜24透射从光源11出射的照明光l1,将从光源12出射的照明光l1反射。由此,光源11的出射光轴与光源12的出射光轴对齐。
[0036]
pbs25透射从分色镜24侧入射的两个照明光l1,将从光源13出射的照明光l1反射。即,光源11、12被配置为偏振方向相对于pbs25为p偏振光,光源13被配置为偏振方向相对于pbs25为s偏振光。由此,光源11、12、13的出射光轴与投射光学系统20的光轴a1对齐。分色镜24和pbs25构成使光源11、12、13的出射光轴相互对齐的对齐光学系统20a。
[0037]
受光光学系统30具备光学元件31。光学元件31使投射光学系统20的光轴a1和受光光学系统30的光轴a2在路面侧的范围(从光学元件31起照明光l1的投射方向的范围)相互对齐。即,这两个光轴a1、a2通过光学元件31,被统一为共同的光轴a10。
[0038]
光学元件31在与投射光学系统20相反的一侧的面具有反射面31a。反射面31a为向光学元件31的内侧凹陷的抛物面。反射面31a将沿着光轴a10入射的反射光r1聚光于光检测器40的受光面。反射面31a的光轴为受光光学系统30的光轴a2。
[0039]
光轴a2相对于投射光学系统20的光轴a1垂直。光轴a1与光轴a2也可以不相互垂直,也可以是其他角度。该情况下,根据光轴a1与光轴a2之间的角度,变更反射面31a的形状,调整光检测器40的配置以使得受光面与光轴a2垂直。
[0040]
图2的(a)、(b)是表示光学元件31的结构的立体图以及侧视图。
[0041]
光学元件31是圆柱状的构件的上表面被倾斜地切割的形状。光学元件31除了反射面31a,还形成用于使从投射光学系统20投射的照明光l1通过的开口31b。在此,开口31b通过沿着光学元件31的中心轴贯通光学元件31的贯通孔而形成。也可以取代贯通孔,形成从光学元件31的外侧面延伸到中心轴的狭缝状的切口,来设置开口31b。如图2的(b)所示,照明光l1通过开口31b而被投射于路面。来自路面的反射光r1通过反射面31a而聚光于光检测器40。
[0042]
返回到图1,光检测器40例如包含光电二极管。作为光检测器40,可以使用具有红外的波段(例如900~1800nm)的检测灵敏度的光电二极管。在光检测器40在可见光的波段也具有检测灵敏度的情况下,也可以使光源11、12、13的出射波长即参考波长、吸收波长1以及吸收波长2透射并遮挡可见光的波段的滤光器被配置于光检测器40的前级。光检测器40也可以包含雪崩光电二极管。
[0043]
光检测器40对从光源11、12、13出射的照明光l1在路面反射而成的反射光r1进行受光,输出基于受光的光量的电信号。在本实施方式中,进行驱动以使得光源11、12、13以时分方式进行脉冲发光。因此,光检测器40以时分方式对基于来自光源11、12、13的照明光l1的反射光r1进行受光,输出与各反射光r1的受光光量相应的电信号。基于与从光检测器40输出的各反射光r1相应的电信号,判定路面的堆积物的种类(水分的状态)。接下来,参照图5,对堆积物的判定处理进行说明。
[0044]
《电路部的结构》
[0045]
图3是表示水分感知装置1的电路部的结构的框图。
[0046]
水分感知装置1除了图1所示的光源11、12、13以及光检测器40,还具备控制部110、存储部120、输出部130、3个驱动部141、142、143、处理部150。
[0047]
控制部110例如包含cpu、微型计算机。控制部110根据存储部120中存储的控制程序,进行水分感知装置1内的各部的控制。作为基于控制程序的功能,判定部111被设置于控制部110。判定部111基于来自光检测器40的检测信号,判定路面上的堆积物的种类(水、雪、冰)。判定部111也可以不构成为基于控制程序的功能,而构成为硬件。
[0048]
存储部120具备存储器,存储控制程序,并且被用作为控制处理时的工件区域。输出部130输出判定部111的判定结果。输出部130也可以是配置于水分感知装置1的监视器等的显示部,或者也可以是用于将判定部111的判定结果发送给服务器等外部处理装置的通信模块。
[0049]
驱动部141、142、143分别根据来自控制部110的控制来驱动光源11、12、13。处理部150将从光检测器40输入的电信号转换为数字信号并且取对数,输出给控制部110。控制部110基于从处理部150输入的检测信号,判定路面的堆积物的种类(水分的状态)。该判定如上所述,通过判定部111而进行。
[0050]
《判定方法》
[0051]
接下来,对堆积物的种类的判定方法进行说明。
[0052]
图4是表示水和冰中的光的吸收系数的图表。
[0053]
在图4中,分别通过箭头来表示分别对光源11、12、13的出射波长设定的参考波长、吸收波长1以及吸收波长2。
[0054]
如图4所示,针对水以及冰的参考波长的吸收系数比吸收波长1以及吸收波长2的吸收系数小。即,参考波长的照明光l1相比于吸收波长1以及吸收波长2的照明光l1,基于水或冰的吸收较少。因此,即使在路面上的照射区域存在水分(水、冰、雪),从光源11出射的照明光l1(参考波长)也容易被路面反射,针对该照明光l1(参考波长)的反射光r1的光检测器40中受光光量较多。另一方面,关于从光源12、13出射的吸收波长1、2,基于水或冰的吸收系数较大。因此,在照射区域存在水分的情况下,吸收波长1、2的照明光l1被水分吸收,被光检测器40受光的吸收波长1、2的反射光r1的光量变少。
[0055]
因此,通过针对几乎不受水分影响的参考波长的照明光l1的检测信号,对针对吸收波长1、2的照明光l1的检测信号进行标准化,从而能够抑制因路面的形状引起的散射等的噪声分量。
[0056]
在本实施方式中,利用吸收波长1与吸收波长2的吸收系数的不同,进行水与冰的判别。即,在吸收波长1(1450nm)下,相对于冰中的吸收系数,水中的吸收系数较大,在吸收波长2(1550nm)下,相对于水中的吸收系数,冰中的吸收系数较大。因此,通过获取吸收波长1以及吸收波长2的检测信号之比,在照射位置存在水分的情况下,能够判别其是水还是冰。
[0057]
图5是表示基于控制部110(判定部111)的堆积物的种类的判定处理的流程图。
[0058]
首先,控制部110驱动光源部10(s11)。具体地说,控制部110经由驱动部141、142、143,使得以时分方式从光源11、12、13出射照明光l1。并且,控制部110经由处理部150,获取根据光源11的驱动而从光检测器40输出的检测信号、根据光源12的驱动而从光检测器40输出的检测信号、根据光源13的驱动而从光检测器40输出的检测信号。
[0059]
接下来,控制部110的判定部111基于参考波长的检测信号的强度、吸收波长1的检测信号的强度以及吸收波长2的检测信号的强度,判定照射位置的状态。
[0060]
具体地说,判定部111在对吸收波长1的检测信号的强度相对于参考波长的检测信号的强度的比率进行对数转换后的值r11为阈值rth1以上、并且对吸收波长2的检测信号的强度相对于参考波长的检测信号的强度的比率进行对数转换后的值r12为阈值rth2以上的情况下(s12:是),判定为在照射位置不存在水分(干燥)(s13)。
[0061]
在此,阈值rth1是从针对水的参考波长(980nm)的吸收系数的值减去针对水的吸收波长1(1450nm)的吸收系数的值、并对该值乘以判定为存在水的厚度的2倍所得到的值。例如,在感知厚度10μm以上的水的情况下,rth1的值为-0.062。此外,阈值rth2是从针对冰的参考波长(980nm)的吸收系数的值减去针对冰的吸收波长2(1550nm)的吸收系数的值、并对该值乘以判定为存在冰的厚度的2倍所得到的值。例如,在感知厚度10μm以上的冰的情况下,rth2的值为-0.069。
[0062]
在步骤s12的判定为否的情况下,判定部111判定为照射位置存在水分,将处理进入步骤s14。
[0063]
在步骤s14中,判定部111计算值r11与值r12之比,判定该值是否为阈值ri以下。在此,阈值ri的值是从冰中的吸收波长1(1450nm)的吸收系数减去参考波长(980nm)的吸收系数后的值与从冰中的吸收波长2(1550nm)的吸收系数减去参考波长(980nm)的吸收系数后的值之比。
[0064]
在值r11与值r12之比为阈值ri以下的情况下(s14:是),判定部111判定为在照射位置仅存在冰或雪,将处理进入步骤s15。在值r11与值r12之比超过阈值ri的情况下(s14:否),判定部111判定为在照射位置存在水或者水以及冰,将处理进入步骤18。
[0065]
在步骤s15中,判定部111判定参考波长的受光强度ir是否为阈值ith以上。在此,在受光强度ir是阈值ith以上的情况下(s15:是),判定部111判定为在照射位置存在雪(s16)。另一方面,在受光强度ir小于阈值ith的情况下(s15:否),判定部111判定为在照射位置存在冰(s17)。在此,控制部110也可以在判定部111判定为存在雪或冰之后,根据参考波长与吸收波长1的检测信号的值来测定其厚度。
[0066]
在步骤s18中,判定部111计算值r11与值r12之比,判定该值是否为阈值rw以上。在值r11与值r12之比为阈值rw以上的情况下(s18:是),判定部111判定为在照射位置存在水(s19)。在此,在判定部111判定为在照射位置存在水之后,控制部110也可以进一步根据参考波长与吸收波长2的检测信号的值来测定水的厚度。
[0067]
另一方面,在值r11与值r12之比小于阈值rw的情况下(s18:否),即,ri≤r11/r12<rw的情况下,判定部111判定为在照射位置存在水与冰的混合物(s20)。在此,控制部110也可以通过比较(r11/r12-ri)的值与(rw-r11/r12)的值,计算存在于照射位置的水与冰的比例,根据该比例与参考波长、吸收波长1、吸收波长2的检测信号的值,测定水与冰的混合物的膜厚。
[0068]
《光源的配置方法》
[0069]
接下来,说明针对参考波长、吸收波长1、2的光检测器40的检测灵敏度和光源11、12、13的配置方法的关系。
[0070]
例如,参考波长以及吸收波长1、2之中,针对参考波长的光检测器40的检测灵敏度
最小、针对吸收波长2的光检测器40的检测灵敏度最大的情况下,优选针对参考波长的照明光l1的反射光r1的尽量多的光量被光检测器40受光。在此,针对路面的照明光l1的反射率根据针对路面的照明光l1的偏振方向而变化。
[0071]
图6的(a)是示意性地表示水分感知装置1的设置状态的一个例子的图,图6的(b)是表示光相对于水面的入射角度与反射率的关系的图表。为了方便,在图6的(a)中,省略光检测器40的图示。
[0072]
在图6的(a)的情况下,水分感知装置1被设置为照明光l1相对于路面在倾斜方向入射。例如,在水分感知装置1被设置于道路侧方的支柱等的情况下,如图6的(a)那样,水分感知装置1以相对于路面rs1倾斜的状态而被设置。该情况下,照明光l1被路面rs1或者其堆积物镜面反射。被镜面反射的反射光r2不入射到光学元件31的反射面31a,因此,该反射光r2不被光检测器40受光。该情况下,在路面rs1,在对照明光l1的光路进行逆光的方向上反射的反射光r1入射到光学元件31的反射面31a,聚光于光检测器40。
[0073]
在此,如图6的(a)那样,在照明光l1相对于路面rs1从倾斜方向入射的情况下,根据光相对于路面rs1的偏振方向,反射率不同。该情况下,反射率越高,由于镜面反射而损耗的光的光量越增大,因此被光检测器40受光的反射光r1的光量减少。例如,在路面rs1存在水的情况下,如图6的(b)所示,在大致全部的入射角度,s偏振光的反射率比p偏振光的反射率大。因此,照明光l1以s偏振光入射的相对于出射功率的受光效率较差。
[0074]
因此,如上述那样,参考波长以及吸收波长1、2之中,光检测器40针对参考波长的检测灵敏度最小的情况下,设定光源11、12、13的配置以使得参考波长的照明光l1以p偏振光入射到路面rs1即可。具体地说,在图6的(a)的结构中,配置出射该照明光l1的光源11,以使得检测灵敏度最低的参考波长的照明光l1相对于路面rs1为p偏振光即可。由此,能够抑制相对于光检测器40的参考波长的反射光r1的受光效率降低。
[0075]
此外,针对光检测器40中的检测灵敏度第二低的吸收波长1的照明光l1,也优选以p偏振光对路面rs1入射。在图6的(a)的结构中,配置出射该照明光l1的光源12,以使得吸收波长1的照明光l1相对于路面rs1为p偏振光即可。由此,能够抑制相对于光检测器40的吸收波长1的反射光r1的受光效率降低。
[0076]
另外,若这样配置光源11、12,则从这些光源11、12分别出射的照明光l1的偏振方向一致,因此能够使这些照明光l1相对于pbs25以p偏振光入射。由此,能够构成为从这些光源11、12分别出射的照明光l1透射pbs25。
[0077]
在该结构中,从光源13出射的吸收波长2的照明光l1相对于路面rs1以s偏振光入射,因此该照明光l1的反射光r1相对于光检测器40的受光效率比其他两个照明光l1降低。但是,光检测器40中的吸收波长2的检测灵敏度如上所述,比参考波长以及吸收波长1高,因此这样即使从光源13出射的吸收波长2的照明光l1的受光效率降低,基于吸收波长2的反射光r1的检测信号也不会极端变小。
[0078]
因此,如上所述,调整光源11、12、13的配置,从而能够防止参考波长以及吸收波长1、2之中任意波长的反射光r1的检测信号极端变小。因此,能够精度良好地进行图5所示的堆积物的种类的判定、堆积物的厚度的判定。
[0079]
另外,图6的(a)中,表示了参考波长以及吸收波长1、2之中,针对参考波长的光检测器40的检测灵敏度最低,针对吸收波长2的光检测器40的检测灵敏度最高的情况下的光
源11、12、13的配置位置,但在针对各波长的光检测器40的检测灵敏度与其不同的情况下,调整光源11、12、13的配置,以使得检测灵敏度最低的波长和检测灵敏度第二低的波长的照明光l1相对于路面rs1为p偏振光,剩余的波长的照明光l1相对于路面rs1为s偏振光即可。此外,至少,光检测器40的检测灵敏度最低的波长的照明光l1相对于路面rs1设定为p偏振光即可,也可以任意选择剩余两个波长的照明光l1的哪个相对于路面rs1设定为p偏振光。
[0080]
另外,在光相对于分色镜24的透射效率与反射效率存在差异的情况下,可以基于该差异,调整使照明光l1入射到分色镜24的两个光源的配置。例如,在透射效率比反射效率高的情况下,即基于透射的光的损耗比基于反射的光的损耗小的情况下,如图6的(a)所示,优选配置光源11、12,以使得光检测器40中的检测灵敏度最低的参考波长的照明光l1(光源11的出射光)透射分色镜24,吸收波长1的照明光l1(光源12的出射光)被分色镜24反射。由此,能够防止参考波长的反射光r1的受光光量降低。因此,能够防止检测灵敏度最低的参考波长的反射光r1的检测信号极端变小。
[0081]
《出射功率的设定方法》
[0082]
接下来,对光源11、12、13的出射功率的设定方法进行说明。
[0083]
在光源11、12、13是激光源的情况下,光源11、12、13的出射功率需要满足激光的安全基准。
[0084]
图7是表示波长为980nm、重复频率为1khz、视角为1.5mrad的情况下、激光的安全基准满足1类的条件的脉冲宽度与峰值功率的关系的图表。
[0085]
从水分感知装置1的光源11、12、13出射的照明光l1的脉冲宽度受光检测器40的响应频率的限制。例如,在使用脉冲宽度为3μsec以上的照明光l1(参考波长:980nm)的情况下,若参考图7的图表,在脉冲宽度为2.6μsec以上、小于5μsec的区域w1,允许的峰值功率比脉冲宽度为5μsec的情况下的峰值功率小。
[0086]
与此相对地,在日本产业标准(jisc68002_002)中记载了,在某个脉冲宽度下允许的峰值功率在比其小的脉冲宽度下也允许。与此相应地,例如在脉冲宽度为3μsec时,通过使用5μsec中被允许的峰值功率,从而与将脉冲宽度设定为5μsec的情况相比,能够减少消耗能量。同样地,在脉冲宽度为2.6μsec以上且小于5μsec的区域w1,通过使用5μsec中被允许的峰值功率,从而与将脉冲宽度设定为5μsec的情况相比,能够减少消耗能量。
[0087]
在参考波长(980nm)的照明光l1中,在上述那样的脉冲宽度小于5μsec的区域,通过使用脉冲宽度为5μsec时被允许的峰值功率从而能够使用比实际的脉冲宽度下被允许的峰值功率大的功率的频带大约为60hz~14khz。
[0088]
另外,在吸收波长1(1450nm)、吸收波长2(1550nm)的照明光中,通过使用比实际的脉冲宽度大的脉冲宽度下被允许的峰值功率从而能够使用更大的功率的区域在脉冲宽度为10^(-3)μsec~10^(-10)μsec的范围不存在。
[0089]
《系统结构例》
[0090]
接下来,对使用了上述实施方式所涉及的水分感知装置1的系统结构例进行说明。
[0091]
图8是示意性地表示路面信息分发系统200的结构的图。
[0092]
路面信息分发系统200具备水分感知装置1和管理服务器2。在图8的例子中,道路3通过桥梁4和通道5的出口5a,接着通道5的内部。
[0093]
水分感知装置1除了经由杆等设置于道路3的侧方以外,还在设置于道路3的侧方
的户外灯、壁面等设置。水分感知装置1对道路3的路面3a的状态进行检测。图8中表示两个水分感知装置1,跟前侧的水分感知装置1对位于桥梁4上的路面3a的区域3a1的状态进行感知,里侧的水分感知装置1对位于通道5的出口5a附近的路面3a的区域3a2的状态进行感知。水分感知装置1判定路面3a的各感知对象区域的水分的状态(堆积物的种类、厚度等),将判定结果经由基站6以及网络7来发送给管理服务器2。
[0094]
基站6设置为在可通信的范围内包含水分感知装置1,构成为能够通过无线来与水分感知装置1进行通信。该情况下,图3的输出部130包含通信模块。基站6与网络7连接。网络7例如是因特网。
[0095]
管理服务器2设置于路面状况分发中心8等,与网络7连接。管理服务器2基于通过水分感知装置1而分发的与路面状态有关的信息,生成用于报告路面3a的状态的地图信息,将生成的地图信息经由网络7以及基站6而分发给车辆等。被分发的地图信息显示于在车辆搭载的汽车导航系统的显示部。驾驶员能够确认显示内容并掌握行驶路径的路面3a的状态。由此,能提高在路面3a行驶时的安全性。
[0096]
此外,水分感知装置1也可以搭载于车辆。该情况下,例如,水分感知装置1被设置于车辆,以使得照明光l1向车辆正下的路面照射。水分感知装置1对车辆正下的路面状态进行感知,使感知结果显示于车辆的导航系统。路面状态的感知在车辆行驶时也进行,随时显示于导航系统。由此,驾驶员能够准确地掌握当前行驶中的路面的状态。
[0097]
该情况下,进一步地,基于水分感知装置1的路面的感知结果也可以与表示当前的行驶位置的信息一起,从导航系统发送至图8的管理服务器2,汇集于管理服务器2。由此,管理服务器2能够基于从各车汇集的路面的感知结果,生成表示道路的状态的更加微细的地图信息。驾驶员能够更加准确地掌握能够成为行驶路径的道路的状态。
[0098]
《实施方式的效果》
[0099]
以上,根据实施方式,起到以下的效果。
[0100]
如图1所示,投射光学系统20的光轴a1与受光光学系统30的光轴a2在路面侧(对象物侧)的范围内相互对齐,因此能够使在路面(对象物)反射的反射光之中、在对齐的光轴a10逆行的反射光r1通过受光光学系统30而聚光于光检测器40。因此,不需要根据水分感知装置1与路面的距离调整相对于路面的照明光l1与反射光r1的角度,即使不进行上述那样的调整,也能够通过光检测器40适当地对来自路面的反射光r1进行受光,感知对象物中的水分的状态(水、冰、雪)。
[0101]
因此,例如,在图8的系统结构例中,能够使设置时的调整作业简略化,能够容易地设置水分感知装置1。此外,在水分感知装置1被设置于车辆的情况下,即使与路面的距离时刻变化,也能够没有问题地感知路面的状态。因此,能够将水分感知装置1设置于车辆等的移动体。
[0102]
如图2的(a)、(b)所示,光学元件31具备:使照明光l1通过并导向路面的开口31b、形成于开口31b的周围并将反射光r1反射从而导向光检测器40的反射面31a。由此,能够抑制反射光r1的利用效率的降低,并且使照明光l1与反射光r1的光轴对齐。
[0103]
在此,反射面31a为使反射光r1聚光于光检测器40的抛物面,包含于受光光学系统30的结构要素。由此,不需要另外配置用于使反射光r1聚光于光检测器40的聚光透镜等,能够实现水分感知装置1的结构的简单化和成本的减少。
[0104]
如图1所示,光源部10具备出射相互不同的波长的光的多个光源11、12、13,投射光学系统20具备使各光源11、12、13的出射光轴相互对齐的对齐光学系统20a。这样,通过使各光源11、12、13的出射光轴与光轴a1对齐,能够通过光学元件31来使光轴a1与受光光学系统30的光轴a2简单地对齐。
[0105]
在此,对齐光学系统20a具备使光源11以及光源12的出射光轴对齐的分色镜24。由此,能够容易地使出射波长较大不同的这些光源11、12的出射光轴对齐。
[0106]
在该结构中,如上所述,光源11的出射波长(参考波长)的光检测器40中的检测灵敏度比光源12的出射波长(吸收波长1)的光检测器40中的检测灵敏度低的情况下,优选将光源11、12相对于分色镜24配置为分色镜24中的参考波长的光的损耗比吸收波长1的光的损耗小。由此,能够抑制参考波长的照明光l1通过分色镜24而衰减,能够确保光检测器40中的参考波长的反射光r1的受光光量。因此,能够防止检测灵敏度最低的参考波长的反射光r1的检测信号极端变小。
[0107]
如图1所示,对齐光学系统20a具备使光源13的出射光轴与光源11以及光源12的出射光轴对齐的pbs25,光源11、12、13的偏振方向被设定为参考波长、吸收波长1以及吸收波长2的照明光l1之中至少光检测器40中的检测灵敏度最低的参考波长的照明光l1相对于路面(对象物)为p偏振光。由此,如参考图6的(a)、(b)来说明那样,能够抑制光检测器40中的参考波长的反射光r1的受光效率降低。因此,能够防止检测灵敏度低的参考波长的反射光r1的检测信号极端变小,能够精度优良地进行图5所示的堆积物的种类的判定、堆积物的厚度的判定。
[0108]
如图5所示,判定部111基于通过针对参考波长的参考用的照明光l1的检测信号来将针对吸收波长1、2这两个检测用的照明光l1的检测信号标准化的值r11、r12,判定路面上的堆积物(雪、冰、水)。这样,能够利用针对几乎不受到水分的影响的参考波长的照明光l1的检测信号,将针对吸收波长1、2的照明光l1的检测信号标准化,从而抑制路面的形状所导致的散射等的噪声分量。因此,能够精度优良地判定路面的水分的状态(堆积物的种类)。
[0109]
《变更例1》
[0110]
水分感知装置1的结构除了上述实施方式所示的结构以外,能够进行各种变更。
[0111]
图9是表示变更例1所涉及的水分感知装置1的光学系统的结构的图。
[0112]
在图9的结构中,相比于图1的结构,光学元件31的反射面31c被变更为平面,用于使反射光r1聚光于光检测器40的聚光透镜32作为受光光学系统30的结构要素而被追加。其他结构与图1同样。作为聚光透镜32,例如能够使用球面透镜。
[0113]
通过图9的结构,也利用光学元件31,将投射光学系统20的光轴a1、受光光学系统30的光轴a2与光轴a10对齐。因此,与上述实施方式同样地,不需要根据水分感知装置1与路面的距离,调整相对于路面的照明光l1与反射光r1的角度,即使不进行上述那样的调整,也能够通过光检测器40对来自路面的反射光r1进行受光。
[0114]
但是,在图9的结构中,相比于图1的结构,另外追加了聚光透镜32,因此结构稍微复杂化,此外,导致成本的上升。此外,由于聚光透镜32中的球面像差、色差,光检测器40的受光面的反射光r1的聚光状态也比上述实施方式稍微劣化。
[0115]
图10的(a)、(b)是分别表示利用模拟来求取通过聚光透镜32(变更例1)以及反射面31a(实施方式)而使反射光r1聚光于光检测器40的情况下的反射光r1的聚光状态的模拟
结果的图。
[0116]
该模拟中,以使用直径50mm、焦点距离100mm的球面透镜(聚光透镜32)和抛物面反射镜(反射面31a)来将从相距10m的点光源出射的980nm、1450nm、1550nm的红外光(反射光r1)聚光于1mm的受光面为验证条件。
[0117]
图10的(a)、(b)中,表示通过聚光透镜32以及抛物面形状的反射面31a来使参考波长(980nm)、吸收波长1(1450nm)以及吸收波长2(1550nm)的各照明光l1的反射光r1聚光的情况下的、光检测器40的受光面上的各波长的红外光的光线的分布。
[0118]
如图10的(a)所示,在使用球面透镜(聚光透镜32)来对反射光r1进行聚光的情况下,反射光的光线在受光面整体扩散,此外,按照每个波长,光线的聚光位置不同。与此相对地,可知在使用抛物面反射镜(反射面31a)来对反射光r1进行聚光的情况下,相比于使用球面透镜(聚光透镜32)的情况,反射光r1聚光于较窄的区域,此外,全部波长的反射光r1的光线通过相同的位置。
[0119]
这样,如上述实施方式那样,使用抛物面反射镜(反射面31a)来对反射光r1进行聚光,从而能够抑制球面像差、色差的影响。因此,在上述实施方式的结构中,相比于图9所示的变更例1的结构,能够使用更小的尺寸的光检测器40,此外,能够提高各波长的反射光r1的检测精度。
[0120]
《变更例2》
[0121]
在上述实施方式中,使用具有反射面31a和开口31b的光学元件31,使投射光学系统20的光轴a1与受光光学系统30的光轴a2对齐。与此相对地,在变更例2中,使用较小的反射镜,使投射光学系统20的光轴a1与受光光学系统30的光轴a2对齐。
[0122]
图11是表示变更例2所涉及的水分感知装置1的光学系统的结构的图。
[0123]
在图11的结构中,相比于图1的结构,省略光学元件31,光学元件26作为投射光学系统20的结构要素而被追加。此外,在图11的结构中,与图9的结构同样地,聚光透镜32作为受光光学系统30的结构要素而被追加。其他结构与图1同样。
[0124]
光学元件26是平板状的反射镜。光学元件26的反射面26a比通过准直透镜21、22、23而平行光化的照明光l1的光束尺寸稍大。光学元件26的形状是与入射到光学元件26的照明光l1的光束形状对应的形状。光学元件26反射照明光l1,并且将通过光学元件26的周围的反射光r1导向光检测器40。光学元件26将投射光学系统20的光轴a1向与受光光学系统30的光轴a2平行的方向折弯,使光轴a1、a2对齐。光学元件26被配置于投射光学系统20的光轴a1与受光光学系统30的光轴a2交叉的位置。
[0125]
通过图11的结构,也能够通过光学元件26,使投射光学系统20的光轴a1和受光光学系统30的光轴a2与共同的光轴a10对齐。因此,与上述实施方式同样地,不需要根据水分感知装置1与路面的距离来调整相对于路面的照明光l1与反射光r1的角度,即使不进行上述那样的调整,也能够通过光检测器40对来自路面的反射光r1适当地受光。
[0126]
另外,在图11的结构中,与图9的结构同样地,反射光r1通过聚光透镜32而聚光于光检测器40,因此如参考图10的(a)、(b)而说明那样,反射光r1受到基于聚光透镜32的球面像差以及色差的影响。该影响可通过取代聚光透镜32而使用抛物面反射镜消除。
[0127]
图12是表示图11的结构中将聚光透镜32置换为抛物面反射镜33的情况下的水分感知装置1的光学系统的结构的图。
[0128]
抛物面反射镜33具有抛物面形状的反射面33a。反射面33a是与从图2的(a)、(b)所示的反射面31a省略了开口31b的形状同样的形状。反射面33a将受光光学系统30的光轴a2垂直折弯,并且使反射光r1聚光于光检测器40的受光面。光轴a2的折弯角并不局限于90度,也可以是其他角度。在该结构中,抛物面反射镜33包含于受光光学系统30的结构要素。
[0129]
通过图12的结构,通过抛物面反射镜33来聚光反射光r1,因此能够消除针对反射光r1的球面像差以及色差的影响。因此,相比于图11的结构,能够使用更小的尺寸的光检测器40,此外,能够提高各波长的反射光r1的检测精度。
[0130]
《变更例3》
[0131]
在上述实施方式中,对齐光学系统20a包含分色镜24和pbs25。与此相对地,在变更例3中,取代pbs25而使用分色镜27。
[0132]
图13是表示变更例3所涉及的水分感知装置1的光学系统的结构的图。
[0133]
在图13的结构中,图1的结构中的pbs25被置换为分色镜27。其他的结构与图1同样。分色镜27透射从光源11、12分别出射的参考波长以及吸收波长1的照明光l1,对从光源13出射的吸收波长2的照明光l1进行反射。由此,光源11、12、13的出射光轴被对齐。
[0134]
通过该结构,也能够起到与上述实施方式同样的效果。
[0135]
另外,在图13的结构中,也优选配置出射该照明光l1的光源,以使得光检测器40中的检测灵敏度较低的波长的照明光l1相对于路面为p偏振光。此外,优选调整光源11、12、13的配置,以使得针对光检测器40中的检测灵敏度较低的波长的照明光l1,可抑制分色镜24、27中的衰减。
[0136]
另外,在该结构中,若吸收波长1、2的波长差较小,则针对吸收波长1的分色镜27的透射效率降低,此外,针对吸收波长2的分色镜27的反射效率可能降低。因此,图13的结构能够应用于在吸收波长1、2的波长差为图4所示的波长差的情况下也能够较高地确保针对吸收波长1、2的分色镜27的透射效率以及反射效率的情况。另外,使用图13的结构的情况下,吸收波长1、2也可以被设定为在能够进行图5所示的判定的范围内波长差比图4的制定方法大。由此,能够较高地确保针对吸收波长1、2的分色镜27的透射效率以及反射效率。
[0137]
《其他变更例》
[0138]
在上述实施方式中,三种波长的光被用作为照明光l1,但用作为照明光l1的波长的种类并不局限于3个。例如,也可以使用分别出射参考波长的照明光l1和吸收波长的照明光l1的两个光源、检测路面的温度的放射温度传感器,判定堆积物的种类。该情况下,从对齐光学系统20a省略分色镜24以及pbs25的任一者。
[0139]
此外,在上述实施方式中,通过对参考波长的反射光r1的受光强度ir与阈值ith进行比较来判定有无路面上的雪,但也可以使用从投射光学系统20投射的照明光l1被对象物反射、基于到被光检测器40受光为止的时间来测定与对象物的距离的tof(time of flight)传感器,进一步测定雪的厚度。通过使用tof传感器,能够准确地测定雪的厚度。
[0140]
此外,在上述实施方式中,从光源11出射的参考波长的光是波长980nm的近红外光,但参考波长并不局限于980nm,也可以是基于水的吸收较少的其他波长。此外,参考波长的光并不局限于近红外光,也可以是波长750nm以下的可见光。但是,若参考波长的光是可见光,则担心路面3a被照射从而妨碍道路3的交通,因此优选参考波长的光是近红外光。
[0141]
此外,构成光学系统的光学部件的形状、大小并不局限于上述实施方式以及变更
例1~3所示的,能够适当变更。例如,图1所示的光学元件31也可以是板状的形状,此外,图12所示的抛物面反射镜33也可以是板状的形状。
[0142]
此外,在图5所示的判定处理中,判定路面的堆积物的种类,但判定对象并不局限于此,也可以进一步判定堆积物的厚度、易滑性等。
[0143]
此外,在上述实施方式以及各变更例中,感知路面处的水分的状态(水、冰、雪),但感知水分的状态的对象物不必局限于路面。例如,也可以对感知地面、桌子的表面的水分的状态的水分感知装置、感知叶子的水分的水分感知装置应用本发明。该情况下,根据应感知的水分的种类等,调整感知使用的光的数量以及种类即可。
[0144]
进一步地,水分感知装置1的应用例并不局限于图8所示的路面信息分发系统200、将水分感知装置1搭载于车辆的应用例,只要是使用照明光和反射光来检测对象物的水分的状态的结构,也可以对其他结构使用水分感知装置1。
[0145]
此外,本发明的实施方式在权利要求书所示的技术思想的范围内能够适当进行各种变更。
[0146]-符号说明-[0147]1ꢀꢀ
水分感知装置
[0148]
10
ꢀꢀ
光源部
[0149]
11、12、13
ꢀꢀ
光源
[0150]
20
ꢀꢀ
投射光学系统
[0151]
20a
ꢀꢀ
对齐光学系统
[0152]
24、27
ꢀꢀ
分色镜
[0153]
25
ꢀꢀ
偏振分束器
[0154]
26
ꢀꢀ
光学元件(反射镜)
[0155]
30
ꢀꢀ
受光光学系统
[0156]
31
ꢀꢀ
光学元件
[0157]
31a
ꢀꢀ
反射面
[0158]
31b
ꢀꢀ
开口
[0159]
40
ꢀꢀ
光检测器
[0160]
111
ꢀꢀ
判定部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
