1.本发明涉及液压挖掘机等工程机械。
背景技术:
2.就由回转马达旋转驱动回转体的回转式作业机械而言,公知下述技术:通过将来自液压泵的排出油从安装于回转马达的溢流阀排出,从而将回转马达压差保持为溢流设定压并使之回转加速。
3.在这样的作业机械的回转驱动装置中,从溢流阀排出的高压油由于以热的形式成为废弃的能量,因此效率差。对此,在专利文献1中,根据基于操作量求出的回转马达的目标旋转速度与由传感器检测的回转马达的实际旋转速度的偏差来确定回转马达供给流量,对泵流量进行控制,以得到该回转马达供给流量。由此,能够减少过剩流量、改善能量效率。另外,在专利文献1中,将目标旋转速度与实际旋转速度的偏差乘以增益得到的量与目标旋转速度相加来作为二次目标旋转速度,通过基于该速度控制泵排出流量,从而还能够调节速度追随性。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2012-246944号公报
技术实现要素:
7.发明要解决的课题
8.回转马达的旋转加速度由回转马达转矩(在回转马达为固定容量式的情况下为回转马达的前后压)决定。在专利文献1中,通过对目标旋转速度进行修正来调节速度追随性,而回转马达的前后压为能够根据当时的回转流量和回转马达旋转速度决定的值或溢流设定压。因此,存在无法对回转马达转矩进行调节、无法获得操作者所意图的希望的旋转加速度的可能。
9.本发明是鉴于上述课题提出的,其目的在于能够提供能够快速使回转马达的旋转速度达到目标旋转速度的工程机械。
10.用于解决课题的手段
11.为了达成上述目的,本发明的工程机械包括:走行体;回转体,其以能够回转的方式安装在所述走行体上;作业装置,其安装于所述回转体;工作油箱;液压泵,其排出从所述工作油箱吸入的工作油;回转马达,其从所述液压泵供给工作油并驱动所述回转体;以及操作装置,其用于指示所述回转体的动作,所述工程机械的特征在于,包括:旋转速度传感器,其检测所述回转马达的旋转速度;压力传感器,其检测所述回转马达的驱动压力;压力调节装置,其能够调节所述回转马达的驱动压力;以及控制器,其控制所述压力调节装置,所述控制器基于来自所述操作装置的输入来计算所述回转马达的目标旋转速度,计算由所述旋转速度传感器检测的旋转速度相对于所述目标旋转速度的背离度,在所述背离度大于规定
值的情况下,对应于所述回转体及所述作业装置的绕回转轴的惯性矩来设定所述回转马达的目标驱动压力,并控制所述压力调节装置,使得由所述压力传感器检测的驱动压力与所述目标驱动压力的差量减小,在所述背离度为所述规定值以下的情况下,控制所述压力调节装置,使得由所述旋转速度传感器检测的旋转速度与所述目标旋转速度的差量减小。
12.根据按照上述方式构成的本发明,在回转马达的旋转速度相对于目标旋转速度的背离度大于规定值的情况(即,回转马达的旋转速度大大低于目标旋转速度的情况)下,控制使得回转马达的驱动压力与对应于回转体及作业装置的绕回转轴的惯性矩、即回转力矩所设定的目标驱动压力一致,在所述背离度为所述规定值以下的情况(即,回转马达的旋转速度接近目标旋转速度的情况)下,控制回转马达的驱动压力,使得回转马达的旋转速度与目标旋转速度一致。由此,能够快速使回转马达的旋转速度达到目标旋转速度。
13.发明效果
14.根据本发明的工程机械,能够快速使回转马达的旋转速度达到目标旋转速度。
附图说明
15.图1是本发明实施方式的液压挖掘机的整体图。
16.图2是搭载于本发明实施方式的液压挖掘机的液压控制装置的液压回路图。
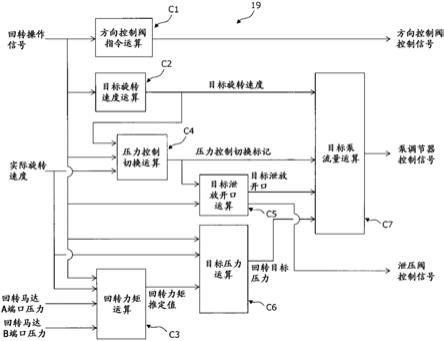
17.图3是本发明实施方式中的控制器的控制框图。
18.图4是本发明实施方式中的控制器的控制模块的详细图(1/8)。
19.图5是本发明实施方式中的控制器的控制模块的详细图(2/8)。
20.图6是本发明实施方式中的控制器的控制模块的详细图(3/8)。
21.图7是本发明实施方式中的控制器的控制模块的详细图(4/8)。
22.图8是本发明实施方式中的控制器的控制模块的详细图(5/8)。
23.图9是本发明实施方式中的控制器的控制模块的详细图(6/8)。
24.图10是本发明实施方式中的控制器的控制模块的详细图(7/8)。
25.图11是本发明实施方式中的控制器的控制模块的详细图(8/8)。
26.图12是示出本发明实施方式中在回转力矩小的状态下进行了右回转全杆操作的情况下的各信号及各控制量的时间变化的图。
27.图13是示出本发明实施方式中在回转力矩大的状态下进行了右回转全杆操作的情况下的各信号及各控制量的时间变化的图。
具体实施方式
28.以下,作为工程机械以液压挖掘机为例,使用附图说明本发明实施方式。需要说明的是,在各图中,对等同部件标注同一附图标记并适当省略重复的说明。
29.图1示出本实施方式的液压挖掘机。在图1中,液压挖掘机包括走行体1、能够以回转轴x为中心回转地设置在走行体1上的回转体2、以及组装于回转体2的作业装置3。在作业装置3的前端安装有作为作业工具的铲斗4。回转体2具备回转马达17(如图2所示)及其减速机构(未图示)。回转马达17使回转体2相对于走行体1回转驱动。
30.图2中示出搭载于液压挖掘机(如图1所示)的液压控制装置的液压电路。需要说明的是,在图2中,省略回转马达17以外的与液压执行机构的驱动相关的部分。
31.本实施方式中的液压控制装置具备可变容量式的液压泵10、回转马达17以及能够变更液压泵10的排出流量(泵流量)的泵调节器10a。从液压泵10排出的压油经由负载单向阀13和方向控制阀14向回转马达17输送。液压泵10的排出压能够通过使用泄压阀12控制与工作油箱21的油路开口来调节。另外,液压泵10的排出口经由主溢流阀11与工作油箱21连接。主溢流阀11规定液压泵10的排出压的上限。
32.在回转马达17的两个端口(a端口及b端口)分别设有回转溢流阀15a、15b及补偿用单向阀16a、16b。回转溢流阀15a、15b承担回转马达17的防过载功能,补偿用单向阀16a、16b承担回转马达17的真空安全(anti-void)功能。
33.另外,本实施方式中的液压控制装置包括检测回转马达17的旋转速度的旋转速度传感器18、控制器19、作为输入操作信号的操作装置的控制杆20、分别检测回转马达17的a、b端口的压力的压力传感器22a、22b。控制器19从旋转速度传感器18获取回转马达17的实际旋转速度,从控制杆20获取回转操作信号,从压力传感器22a、22b获取回转马达17的a、b端口压力。控制器19基于这些信号进行运算,向泵调节器10a、泄压阀12及方向控制阀14输出控制信号。
34.图3中示出控制器19的控制模块。控制部c1输入回转操作信号并输出方向控制阀控制信号。控制部c2输入回转操作信号并输出目标旋转速度。控制部c3输入实际旋转速度、回转马达a端口压力及回转马达b端口压力并输出回转力矩推定值。需要说明的是,此处的回转力矩表示从回转马达17侧观察的回转体2及作业装置3的绕回转轴x的惯性矩,也包含减速机产生的影响。
35.控制部c4输入回转操作信号、控制部c2所输出的目标旋转速度及实际旋转速度并输出压力控制切换标记。控制部c5输入控制部c4所输出的压力控制切换标记及回转操作信号并输出目标泄放开口。控制部c6输入控制部c3所输出的回转等效力矩、回转操作信号及实际旋转速度并输出回转目标压力。控制部c7根据控制部c2输出的目标旋转速度、控制部c4输出的压力控制切换标记、控制部c5输出的目标泄放开口及控制部c6输出的回转目标压力来计算目标泵流量,并输入与该目标泵流量对应的泵调节器控制信号。
36.图4中示出控制部c1的详细。在控制部c1中,将回转操作信号分别输入至控制表t1a、t1b。控制表t1a在回转操作信号为正时对应于其大小输出方向控制阀控制信号(a端口加压)。控制表t1b在回转操作信号为负时对应于其大小输出方向控制阀控制信号(b端口加压)。
37.图5中示出控制部c2的详细。在控制部c2中,将回转操作信号输入至控制表t2。控制表t2对应于回转操作信号的值而输出回转马达的目标旋转速度。在此,在回转操作信号为正时,目标旋转速度为正旋转,与右回转建立对应。
38.图6中示出控制部c3的详细。运算部o3a、o3b将回转马达a端口压力减去b端口压力的压差与回转马达容积q相乘并除以2π,计算回转马达转矩。运算部o3c对回转马达旋转速度进行微分,计算旋转加速度。运算部o3d通过由回转马达转矩除以旋转加速度来计算回转力矩推定值并输出。需要说明的是,在控制安装时,运算部o3d进行除零防止的应对。作为具体的除零防止应对,存在设置旋转加速度的最小值等。
39.运算部o3e、o3f判定回转马达旋转加速度的绝对值是否超过控制器19中预先设定的阈值th1。运算部o3g、o3h判定回转操作信号是否超过控制器19中预先设定的阈值th2。运
算部o3i在运算部o3f、o3h的输出均为true的情况下输出true。运算部o3j在运算部o3i的输出为true的情况下输出来自运算部o3d的值(回转力矩推定值),在false的情况下输出控制器19中预先设定的基准力矩。运算部o3k对运算部o3j的输出进行低通滤波处理,作为回转力矩推定值输出。
40.图7中示出控制部c4的详细。控制部o4a将目标旋转速度减去实际旋转速度来计算旋转速度偏差。控制部o4b、o4c判定回转操作信号是否超过0,在超过的情况下输出1,在未超过的情况下输出-1。控制部o4d将旋转速度偏差与控制部o4c的输出(1或-1)相乘。控制部o4e输出目标旋转速度的绝对值。控制部o4f选择目标旋转速度的绝对值和控制器预先设定的最小旋转速度w
min
(回转马达17基本视为停止的旋转速度。例如10rpm)的最大值并输出。控制部o4g将旋转速度偏差除以控制部o4f的输出,计算旋转速度偏差比率。运算部o4h将旋转速度偏差比率与控制器中预先设定的速度偏差比率阈值rw(例如0.2等。在该情况下判定相对于目标值的速度偏差是否超过20%。)比较,在超过速度偏差比率阈值rw的情况下,作为压力控制标记输出on,在为速度偏差比率阈值rw以下的情况下,作为压力控制标记输出off。
41.图8中示出控制部c5的详细。控制表t5a将回转操作信号转换为一次目标泄放开口并输出。在这里,如图8所示,控制表t5a的特性为,在微小的操作量(例如最大操作量的
±
10%)以下时为最大开口,在超过该微小的操作量时为零。运算部o5a在压力控制标记为on的情况下,输出控制器19中预先设定的控制开口(例如5平方mm固定值),在压力控制标记为off的情况下输出0。运算部o5b选择控制表t5a的输出和运算部o5a的输出的最大值,输出至减小速率限制模块c8。减小速率限制模块c8基于运算部o5b的输出和压力控制标记计算目标泄放开口并输出。控制表t5b将目标泄放开口转换为泄压阀控制信号并输出。
42.图9中示出减小速率限制模块c8的详细。运算部o8a输出压力控制标记的单位步骤时间前的值。运算部o8b将压力控制标记与压力控制标记的单位步骤时间前的值比较,在前者小于后者时(压力控制标记从on切换为off时)输出true,并输入至运算部o8c的set端子。运算部o8c为所谓的触发器,在set端子被输入true时输出true,并连续输出rue,直到reset端子被输入true为止。运算部o8d在来自运算部o8c的输入为true时选择速率r1,在false时选择速率r2,并输出至下降速率限制运算部o8e。在此,速率r1设为限制使得开口切换时的冲击减少的值(例如,-10平方mm每秒),速率r2设为能够快速实现开口切换的值(例如,-1000平方mm每秒)。运算部o8e基于从运算部o8d输出的速率对所输入的目标开口进行下降速率限制并输出至运算部o8f。运算部o8f判定下降速率限制后的目标开口是否为0,在0的情况下输出true,并输入至运算部o8c的reset端子。
43.图10中示出控制部c6的详细。在控制部c6中,将回转操作信号输入至控制表t6a、t6b。控制表t6a计算与回转操作信号对应的回转最大压力。控制表t6b计算与回转操作信号对应的回转加速压力。运算部o6a、o6b将回转力矩的计算值除以预先控制器19设定的回转基准力矩,进一步乘以控制器19中预先设定的增益g1,从而计算回转加速压力调节增益。运算部o6c将回转加速压力与回转加速压力调节增益相乘并输出至运算部o6d。运算部o6d选择运算部o6c的输出和回转最大压力的最小值,作为回转目标压力输出。
44.图11中示出控制部c7的详细。运算部o7a将实际旋转速度乘以回转马达容积q,计算实际回转流量。运算部o7b将回转目标压力和目标泄放开口输入至运算部o7b,以c为系
数、以a为目标开口、以p为目标压,使用cap
1/2
的关系计算泄放流量目标值。运算部o7c将实际回转流量与泄放流量目标值相加并输入至运算部o7e。运算部o7d将目标旋转速度乘以回转马达容积q,计算回转目标流量。运算部o7e在压力控制标记为on的情况下选择输出运算部o7c的输出,在压力控制标记为off时选择输出运算部o7d的输出。运算部o7e的输出经由低通滤波o7f作为目标泵流量输出。另外,控制表t7将目标泵流量转换为泵调节器指令值并输出。
45.图12中示出在回转力矩小的状态(铲斗4为空的状态)下进行了右回转全杆操作的情况下的各信号及各控制量的时间变化。
46.曲线(a)示出回转操作信号的时间变化。
47.曲线(b)示出回转马达17的目标旋转速度及实际旋转速度的时间变化。目标旋转速度按照回转操作信号而上升,实际旋转速度与后述的回转马达压力的上升相伴而增加。
48.曲线(c)表示回转马达17的目标旋转速度、实际旋转速度的偏差相对于目标旋转速度的比率(速度偏差比率)以及旋转加速度的时间变化。图中的实线表示速度偏差比率,虚线表示旋转加速度,单点划线表示旋转加速度阈值th1及速度偏差比率阈值rw。在回转操作开始后,将速度偏差比率超过速度偏差比率阈值rw的时刻设为t1,将变为速度偏差比率阈值rw以下的时刻设为t2。另外,将旋转加速度超过阈值th1的时刻设为t3,将变为阈值th1以下的时刻设为t4。
49.曲线(d)表示回转马达17的端口压力的时间变化。驱动侧的a端口压力按照后述的泄放开口与泵流量的关系上升。
50.曲线(e)表示回转力矩推定值的时间变化。在时刻t3到时刻t4期间使用力矩推定值,在其他时刻,作为力矩推定值使用控制器19中设定的基准力矩。
51.曲线(f)表示压力控制标记的时间变化。压力控制标记在时刻t1到时刻t2为on。
52.曲线(g)表示泄放开口的时间变化。在压力控制标记为on的时刻t1至时刻t2,泄放开口维持控制开口。在时刻t2,由于控制标记从on变为off,因此减小速率限制工作,开口以速率r1减小。
53.曲线(h)表示泵流量和回转马达流量的时间变化。在非操作时,泵流量为最小流量(待机流量)。在进行回转操作且压力控制标记为on时,将回转马达流量与泄放流量相加得到的量作为泵流量进行排出。在此,泄放流量作为泄压阀12维持控制开口时能够实现目标压力的流量被计算。若在时刻t2压力控制标记变为off,则基于低通滤波的效果,泵目标流量逐渐接近回转马达流量。
54.图13示出在回转力矩大的状态(铲斗4中收容有砂土的状态)下进行了右回转全杆操作的情况下的各信号及各控制量的时间变化。与图12不同,由于回转力矩变大,因此针对相同的回转压力,旋转加速度(实际旋转速度的上升率)小(曲线(b))。此时,力矩推定值被计算得很大(曲线(e)),目标回转压力增大。由此,无需大幅减小回转马达17的旋转加速度就能够进行回转驱动。
55.<效果>
56.在本实施方式中,在具备走行体1、能够回转地安装在走行体1上的回转体2、工作油箱21、排出从工作油箱21吸入的工作油的液压泵10、从液压泵10供给工作油以驱动回转体2的回转马达17及用于指示回转体2的动作的操作装置20的液压挖掘机中,具备:旋转速
度传感器18,其检测回转马达17的旋转速度;压力传感器22a、22b,其检测回转马达17的驱动压力;压力调节装置10a、12,其能够调节回转马达17的驱动压力;以及控制器19,其控制压力调节装置10a、12,控制器19基于来自操作装置20的输入计算回转马达17的目标旋转速度,计算由旋转速度传感器18检测到的旋转速度相对于所述目标旋转速度的背离度,在所述背离度大于规定值rw的情况下,对应于回转体2及作业装置3的绕回转轴x的惯性矩、即回转力矩来设定回转马达17的目标驱动压力,并控制压力调节装置10a、12,使得由压力传感器22a、22b检测到的驱动压力与所述目标驱动压力的差量减小,在所述背离度为规定值以下的情况下,控制压力调节装置10a、12,以使得由旋转速度传感器18检测到的旋转速度与所述目标旋转速度的差量减小。
57.根据按照上述方式构成的本实施方式,在回转马达17的旋转速度相对于目标旋转速度的背离度大于规定值rw的情况(即,回转马达17的旋转速度大大低于目标旋转速度的情况)下,控制使得回转马达17的驱动压力与对应于回转力矩设定的目标驱动压力一致,在所述背离度为规定值rw以下的情况(即,回转马达17的旋转速度接近目标旋转速度的情况)下,控制回转马达17的驱动压力,使得回转马达17的旋转速度目标旋转速度一致。由此,能够快速使回转马达17的旋转速度达到目标旋转速度。需要说明的是,在本实施方式中,将旋转速度偏差比率用作相对于目标旋转速度的背离度,但也可以使用旋转速度偏差作为背离度。
58.另外,本实施方式的液压挖掘机具备检测回转马达17的驱动压力的压力传感器22a、22b,控制器19基于由旋转速度传感器18检测到的旋转速度计算回转马达17的旋转加速度,基于由压力传感器22a、22b检测到的驱动压力和所述旋转加速度计算所述回转力矩。由此,能够准确地计算回转力矩。
59.另外,在本实施方式中,液压泵10为可变容量式,能够调节回转马达17的驱动压力的压力调节装置具有能够调节液压泵10的排出流量的泵调节器10a和设置于将液压泵10与工作油箱21连接的流路的泄压阀12,控制器19在所述背离度为规定值rw以下的情况下,在使泄压阀12闭合的状态下,控制泵调节器10a,使得由旋转速度传感器18检测到的旋转速度与所述目标旋转速度的差量减小。由此,在回转马达17的旋转速度接近目标旋转速度时,由于在使泄压阀12闭合的状态下控制液压泵10的排出流量,因此能够减少液压损失。需要说明的是,在液压泵10为固定容量式的情况下,通过使例如发动机旋转速度变化来控制液压泵10的排出流量,从而对回转马达17的驱动压力进行调节。在该情况下,控制发动机旋转速度的发动机控制器与压力调节装置相当。
60.另外,在本实施方式中,控制器19在所述背离度大于规定值rw的情况下,在将泄压阀12的开口量保持为规定的开口量(控制开口)的状态下,控制泵调节器10a,使得由压力传感器22a、22b检测到的驱动压力与所述目标驱动压力的差量减小。由此,能够高精度地调节回转马达17的驱动压力。
61.以上对本发明的实施例进行了详细说明,但本发明并非限定于上述实施例,而包含多种变形例。例如,上述实施例将本发明应用于液压挖掘机,但本发明能够应用于具备回转体的全部工程机械。另外,上述实施例为了使本发明清楚易懂而作了详细说明,并非限定于具备所说明的全部构成的构造。
62.附图标记说明
[0063]1…
走行体、2
…
回转体、3
…
作业装置、4
…
铲斗、10
…
液压泵、10a
…
泵调节器(压力调节装置)、11
…
主溢流阀、12
…
泄压阀(压力调节装置)、13
…
负载单向阀、14
…
方向控制阀、15a、15b
…
回转溢流阀、16a、16b
…
补偿用单向阀、17
…
回转马达、18
…
旋转速度传感器、19
…
控制器、20
…
控制杆(操作装置)、21
…
工作油箱、22a、22b
…
压力传感器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
