1.本发明属于激光雷达遥感数据处理技术领域,具体涉及一种基于地基激光雷达点云的植 被聚集度指数估算方法。
背景技术:
2.森林是地球生态变化的重要影响因素,其作为陆地生态系统的主体,是陆地上面积最大、 分布最广、组成结构最复杂、物质资源最丰富的生态系统,是自然界中功能最完善的资源库, 与大气进行着碳、水和能量的交换,在水循环、碳循环与气候的调节中扮演者重要角色(骆 社周等,2012)。在人类社会发展速度日渐增快的今天,全球性的环境问题例如气候变暖、生 物多样性衰退、生态系统功能减弱等,均威胁着地球可持续发展能力。因此,准确的监测森 林生态系统的各项参数对评估人类活动对环境产生的影响有极大的参考和研究价值(郭庆华 等,2014)。传统的测量方法大多在样方水平上对生态系统进行监测,能够得到最为准确的数 据。但随着近年来探测技术的不断发展与进步,传统的实地测量已经体现出其无法适应大尺 度、动态监测的局限性,并且费时费力。激光雷达是一种新兴的主动遥感技术,能够较好地 弥补传统测量方式的许多缺陷,能够在森林生态系统的检测和模拟上发挥重要的作用。
3.激光是20世纪人类发展史上最重要的发明之一,激光雷达技术从20世纪中后期诞生以 来发展就十分迅速;激光雷达最早的名称为laser radar(radio detection and ranging),现 在通常被简称为lidar,即激光探测与测距。激光雷达不仅在地球科学内有着极为广泛的应 用,还在测绘、三维城市、城市规划、林业、农业等领域有着愈发广泛的应用。作为一种主 动探测手段,激光雷达拥有着较高的精度,还拥有着采样速度快,分辨率高,无需接触探测 目标、抗干扰能力强等优势。作为一种非接触的主动遥感技术。激光雷达技术可以在不接触 目标对象的情况下,高速、高效地获得目标对象的空间三维信息(f.m.danson等,2007)。 按照不同的平台来区分,激光雷达可以分成地基、车载、机载、星载等类别,其中地基激光 雷达就是指架设在地面平台上的激光雷达,也可以称为地基激光扫描(tls)。
4.随着激光雷达技术日新月异的发展,通过使用地基激光雷达数据来进行植被结构参数反 演的研究数量日益增加,成功利用地基激光雷达数据研究林木结构参数的反演案例有很多。 其中,间隙率(gap fraction)和聚集度指数(clumping index,ci)是描述植被拦截光过 程和冠层辐射传输过程的两个重要冠层结构特征参数。聚集度指数是由nilson(1971)在通 过对植物冠层辐射传播理论的研究过程中提出的;他在研究的过程中得到了间隙率与叶面积 指数之间的数学表达式,并基于马尔可夫模型引入了一个修正参数λ0,以此来描述冠层的聚 集情况,被沿用至今。此后,chen(1991)将聚集度指数定义为有效叶面积指数除以真实叶 面积指数;随后又提出间隙尺寸分布法,消除了对于叶片和冠层空间分布模式的假设,定量 衡量了冠层内部的聚集效应,在很大程度上消除了树冠间的大间隙。lang和xiang(1986) 提出使用有限长度平均法来计算聚集度指数,假设在有限长度上子样
线内部叶片呈随机分布; 该方法较为简便实用,得到了广泛接受。上述两种方法,是在考虑了激光雷达和光学仪器对 单木或林分的测量以及每个方法的优缺点的情况下,目前用来计算叶片聚集度指数的主要方 法,即(1)基于冠层间隙率的对数平均数方法ci
lx
(2)基于间隙尺寸分布方法ci
cc
。
5.danson等(2007)通过将tls数据xy轴的切片投影转化为二维图像来计算间隙率,同 时与数字半球照片计算得到的间隙率进行对比,结果表明利用高分辨率点云数据和数字半球 图像得到的间隙率是相似的,其中的一些差异可能是由于照片中看到的太阳眩光或与数字图 像的手动阈值相关的错误造成的。garc
í
a等人(2015)分别基于地基和机载激光雷达技术计 反演出了不同植被类型的聚集度指数,同时将反演的结果与基于半球摄影技术得到的聚集度 指数结果进行对比,结果表明,不同方法在反演聚集度指数的时候有较强的相关性。bao(2016) 分别用地基激光雷达(tls)数据和数字半球摄影(dhp)反演间隙率,利用lang(1986) 提出的公式计算聚集度指数,二者反演结果的r2(决定系数)达到0.863,这说明tls和 dhp的聚集指数具有良好的相关性。
6.目前在间隙率的反演过程中,主要分为体元法和投影法两类。其中体元法主要通过将点 云所在的的空间用一定大小的三维体元进行划分,判断体元内部是否有点云存在并统计包含 点云的所有体元数量,从而计算间隙率。投影法的原理主要类似于数字半球摄影方法,将三 维信息投影至二维平面,然后计算间隙率。两种方法尤其是体元法在利用三维点云数据进行 冠层的定量化描述时,虽然运用到了三维坐标,通常在标定各个体元的属性后要将其投影为 半球图像,又把三维信息直接压缩至二维,在进行最后的参数提取时没有真正的利用三维信 息,因此上述方法存在着较大的信息损失。
技术实现要素:
7.针对上述存在的问题或不足,为解决现有植被聚集度指数估算方法特征选取以及数据利 用不足导致最终结果精度较差的问题,本发明提供了一种基于地基激光雷达点云的植被聚集 度指数估算方法,将原始点云数据转换为球坐标并投影至半球表面,按一定的天顶角和方位 角间隔将数据划分为不同区域,根据激光点与半球面之间的不同距离为其赋予不同的投影面 积,统计不同区域内激光点面积总和得到间隙率数据,最终将间隙率通过有限长度平均法计 算得到聚集度指数。
8.一种基于地基激光雷达点云的植被聚集度指数估算方法,包括以下步骤:
9.步骤1、点云数据获取与预处理:
10.将目标样地的地基激光雷达点云数据利用软件进行配准和去噪,将其导出为文本格式后 剔除低于地基激光雷达(如扫描仪)高度的点。
11.由于地基激光扫描仪采集到的点云数据一般数据量较大、密度较高、且带有扫描物体光 学特征信息,因此在进行冠层结构参数的研究之前,还需进行多测站点云数据配准、点云去 噪等预处理。只有在精准的完成预处理工作的情况下,才能获得准确的三维雷达点云数据, 从而更加准确的反演出冠层结构参数。
12.在研究区域设置样方,根据样地情况选择测站位置架设地基激光雷达,要确保可以扫描 到完整的森林冠层。并在激光雷达的扫描范围内设置至少3个标靶作为后期多站配准的依据。
13.步骤2、点云坐标转换及区域划分:
14.地基激光雷达获取的点云数据是空间直角坐标系,由于太阳入射冠层的路径通常用天顶 角来描述,因此将步骤1获得的点云坐标转换为球坐标,即将点云坐标由p(x,y,z)转化为p 其中θ为天顶角,为方位角,r为冠层点云到原点的距离。公式如下:
[0015][0016]
而地基激光雷达获取的点云数量较大,为了提高程序的运行速度,需要将点云数据在天 顶角0-90
°
和方位角0-360
°
的范围内均分为若干区域,进行数据分块。
[0017]
进一步的,所述天顶角选用5
°
,方位角选用45
°
,作为等分的基本参数,以易于后期 软件和数据的兼容和运算效率。
[0018]
步骤3、半球投影:
[0019]
将步骤2所得的所有点云数据投影至半球面上,以便于后续对于间隙率的计算。半球投 影面半径l为目标样地最大树高上下1m的范围,此时点云数据中的每个激光点会获得一个 与其相对于投影面距离相关的投影半径d。
[0020]
步骤4、计算激光点面积:
[0021]
考虑到地基激光雷达扫描叶片时的采样间隔,以及不同树种叶片面积大小有着较大差别, 其在同一天顶环内部不同方位的生长情况也不同,因此在设置激光点面积时需要同时考虑这 些各项因素。
[0022]
设激光点半径为e,激光点距离球坐标原点距离为r,半球投影面的半径为l,则激光点 投影半径d可表示为(以下简称投影半径):
[0023]
d=|l-r|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0024]
对于所用的地基激光雷达的分辨率为f米处可识别相距f米的两个激光点,则激光点半 径e与投影半径d之间满足关系式:
[0025]
e=k*d*f/f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0026]
其中,k为调节系数,取值范围为2-5。
[0027]
最终,单个激光点投影在半球面上的面积s可表示为:
[0028]
s=pi*e2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0029]
其中,pi为圆周率
[0030]
步骤5、估算间隙率并计算聚集度指数:
[0031]
通过对不同天顶环各个方向上投影的总激光点面积进行统计,进而计算半球面上未被投 影的空余部分面积总和se与投影半球总面级st的比值可得到各天顶环各个方位的间隙率gf, 可表示为:
[0032]
gf=se/st
ꢀꢀꢀꢀꢀꢀ
(5)
[0033]
将各天顶环不同方向的间隙率数据通过有限长度平均法计算,可得到冠层的聚集度指数 结果,可表示为:
[0034]
[0035]
其中,表示天顶角为θ,方位角为时的间隙率,ω(θ)表示天顶角为θ时 的聚集度指数,分子为冠层平均间隙率的对数,分母为间隙率的对数平均。
[0036]
本发明中,对于投影面半径l的选择,通常需要比较多组半径值寻找其中较为适合的取 值。经过多次实验验证,最适投影面半径为样地范围内最大树高上下1米。而对于激光点面 积公式中调节系数的选择通常为2-5之间的常数,其大小可根据所应用样地内树种不同进行 调整。最终,本发明估算聚集度指数的方式是通过有限长度平均法对间隙率数据的计算得到 的。该方法假设其处理的数据所在的每个区域都有间隙,当出现某个区域的间隙率为0时, 则需要向其中加入空隙元素;另外,该方法还假设从冠层中采集到的数据在有限长度单元内 呈随机分布,这也是有限长度平均法的名称由来。基于冠层间隙率的对数平均数方法是lang 和xiang于1986年提出的,即利用间隙率平均数的对数和间隙率对数的平均数之比求聚集度 指数,其公式如式(6)。
[0037]
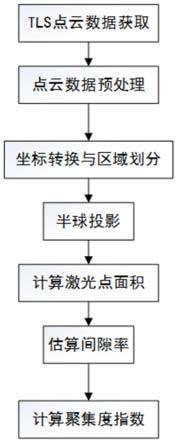
本发明通过利用地基激光雷达获取森林植被冠层三维激光点云数据,结合树木冠层三维 结构特点以及叶片分布形式,经历配准、点云归一化、去噪和高程滤波等预处理过程、半球 投影、重构激光点面积、估算间隙率从而使用有限长度平均法计算得到聚集度指数,建立了 基于tls点云数据从森林冠层中反演聚集度指数的方法。
[0038]
本发明对地基激光雷达点云数据先依次进行配准、去噪和滤波的数据预处理;然后对处 理后的点云数据转换坐标系后投影至半球面,以对间隙率的计算,此过程通过激光点面积重 构,将三维点云的垂直方向信息表达在了半球投影后的计算结果中,引入不同投影半径的激 光点赋予不同的面积这一概念,使得本发明将三维的高程信息不被忽略,转换成二维可用信 息,有效避免了传统方法无法有效使用第三维信息的缺陷;最后分区域统计间隙率数值,使 用有限长度平均法计算得到各区域聚集度指数结果;其流程如图1所示。
[0039]
综上所述,本发明能够在估算聚集度指数时充分考虑到植被的垂直结构信息,克服了使 用传统的数字半球摄影方法时,受使用时间,天气等因素的限制,无法全天候进行数据采集; 以及由于曝光参数设置的影响,所造成的间隙率结果在冠层稀疏区域被低估等缺陷。本发明 在考虑到不同高度冠层生长分布情况区别的情况下,为不同投影半径的激光点赋予不同的面 积值,有效的对多种阔叶林冠层聚集度指数进行了估算。
附图说明
[0040]
图1为本发明的流程图;
[0041]
图2为实施例具体数据的示意图;
[0042]
图3为采样间距和点云到原点距离的关系示意图;
[0043]
图4为半球面激光点投影示意图;
[0044]
图5为本方法和数字半球投影方法估算的间隙率结果对比折线图;
[0045]
图6为本方法和数字半球投影方法估算的聚集度指数结果的对比折线图;
具体实施方式
[0046]
以下通过一个样地的实施例并结合附图对本发明作进一步详细说明:
[0047]
开发环境为microsoft visual studio 2013,编程语言为c。
[0048]
在电子科技大学清水河校区主楼旁的楠木林中设置25*30米的样方,地基激光雷
达数据 由leica scanstation c10在4个测站处获取,一个测站在样地中央,其余3个在边缘位置。 在林中布设3个标靶作为多测站数据配准时的公共点。结合对样地情况以及点云总数量的考 虑,在leica c10上设置高分辨率扫描(距离100米,水平、垂直间距0.05米),分辨率不 宜过高以避免数据冗余,其余参数由下表列出。利用cyclone软件被用来配准、去噪和归一 化多站的tls数据,将数据导出后剔除z轴小于0的点云。
[0049]
表1三维激光扫描仪leica scanstation c10参数
[0050][0051][0052]
步骤1、对获取到的地基激光雷达点云数据进行预处理,利用软件对其进行配准和去噪, 将其导出为文本格式后以激光雷达扫描仪高度为阈值进行高程滤波。其中图2(a)为地基激光 雷达获取的冠层点云数据,(b)为样地的数字半球照片数据。
[0053]
步骤2、对预处理后的点云数据以激光雷达扫描仪站点为坐标原点建立空间直角坐标系, 将每个点的坐标记为p(x,y,z),x轴是正东方向,y轴是正北方向,z轴为垂直方向。建立 坐标系后,将激光点坐标由空间直角坐标转换为球坐标,并将转换坐标后的数据按照天顶角 5
°
和方位角45
°
的间隔进行数据分块,便于节约成本。根据树高与样地半径的关系得到有 效天顶角范围在0-70
°
,所以70
°
天顶角的范围内划分为14个圆环,方位角以0
°
、45
°
、 90
°
、135
°
、180
°
、225
°
、270
°
、315
°
为中央刻度划分为8个区域,共将数据划分为 112个区域。
[0054]
步骤3、根据样方大小选15米作为半球面的半径,将点云投影至半球面上。
[0055]
步骤4、根据点云数据中激光点距离投影面的相对距离不同,通过激光雷达扫描仪的分辨 率进行转换,从而得到激光点半径,进而计算出激光点面积。
[0056]
步骤5、将每个区域内的激光点面积相加统计出总面积,用投影半球面积减去激光点总面 积得到空隙区域面积,进而得到间隙率。对各方向间隙率数据求其对数平均数,计算可得各 天顶环的聚集度指数。
[0057]
对于实施例的目标样地采用本发明方法和数字半球投影方法分别进行了对比实验。具体 的实验曲线如图5和图6所示。图5为本方法和数字半球投影方法估算的间隙率结果对比折 线图;图6为本方法和数字半球投影方法估算的聚集度指数结果的对比折线图。
[0058]
通过对点云区域划分后的各方向数据进行半球投影以及激光点面积重建,然后对每个区 域的间隙率进行计算,从中不难发现,在不同的投影半径下,或不同调节系数下,同一激光 点会被赋予不同的面积,进而会得到不同的间隙率和聚集度指数计算结果,因此可
探究投影 半径和调节系数对间隙率估算的影响。
[0059]
经过验证,当投影半径略高于样方内树高上界时,所得间隙率和聚集度指数结果最符合 预期,在本样方中选取的投影半径为16;而调节系数大小为2.5时较为符合预期。通过对 本方法与数字半球摄影方法得到的间隙率相互对比,可以发现两种方法反演出的间隙率相关 性较高,决定系数为0.8104,但在天顶角较低区域两种方法计算得到的间隙率数值并不相 同,激光点面积投影法所计算得到的结果要偏大一些,这是因为本方法在进行激光点投影时 的投影方向,与数字半球摄影中鱼眼镜头对周围景物的拍摄方向不同,导致在低天顶角区域 两者差距较大,而本方法在高天顶角区域由于充分考虑到冠层在垂直方向的叶片分布,因此 在叶片密度较大时克服了数字半球摄影技术常常低估间隙率的问题。
[0060]
通过以上实验数据可见,对同一楠木样地进行的示例数据采集与计算,根据本发明提出 的方法与数字半球摄影方法得到的聚集度指数结果,两种方法间的相关性依旧较高,决定系 数为0.7865,这说明采用本方法计算植被冠层的聚集度指数是可行且有效的。
[0061]
本发明通过激光点面积重构,将三维点云的垂直方向信息表达在了半球投影后的计算结 果中,引入不同投影半径的激光点赋予不同的面积这一概念,使得三维的高程信息不被忽略, 转换成二维可用信息,有效避免了传统方法无法有效使用第三维信息的缺陷;最后分区域统 计间隙率数值,使用有限长度平均法计算得到各区域聚集度指数结果。本发明能够在估算聚 集度指数时充分考虑到植被的垂直结构信息,克服了传统方法精度不高的问题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
