1.本发明属于阀门检测技术领域,具体涉及一种阀门性能智能检测装置及检测方法。
背景技术:
2.对于阀体来说,阀体的密封性是阀体的最重要指标之一,每个阀体在出厂之前,一般均需要对其进行密封性检测。
3.如公开号cn109916575b公开了一种阀门的密封性检测装置,本发明可以实现自动的对阀体进行批量化检测,检测效率高,一次性可以实现多个阀体的检测,实现自动上料、输送、检测以及合格产品与不合格产品的分料,有效保证阀体检测的准确性和批量化生产,本发明结构简单,使用方便,在检测时,先在检测控制阀处于关闭状态下控制打开充气控制阀向气囊内充入一定压力的气体,然后,关闭充气控制阀,将检测连接嘴与待检测的阀体密封连接,然后打开检测控制阀,通过与控制器连接的气囊内的气压传感器来判断气囊是否出现气压下降,进而判断阀体的密封性符合要求,本发明可以方便的对各个组件进行安装与调试,调试方便简单,可以有效保证阀体密封性检测的效率。
4.又如公开号cn107991073b公开了一种塑料阀门的测试装置及方法、计算机设备,所述塑料阀门的测试装置包括机架、压力测量机构、扭矩测量机构、弯矩机构、温度环境箱、控制机构及一对密封夹具,机架上设有承托杆,所述承托杆的两侧分别设有由第一驱动机构驱动的驱动板,密封夹具用于对待测阀门的两侧进行密封,密封夹具上设有用于与气源连通的气孔,压力测量机构用于检测阀门内的压力及控制所述气孔与气源的通断,所述扭矩测量机构用于对待测阀门的阀杆实施扭转操作,机架、弯矩机构及扭矩测量机构设置在温度环境箱内。能实现阀门的快速安装与准确定位、对阀门进行不同温度及压力下的密封性能与扭矩性能测试,从而能更准确地实现对塑料阀门性能的测试。
5.现有技术中的阀门密封性能检测装置,其检测阀门的规格尺寸单一,难以检测不同规格尺寸的阀体。同时现有技术中的检测装置,难以对检测后的阀体自动分类,同时现有技术中的检测装置,线路、管道复杂,导致故障率较高,影响检测效率。
技术实现要素:
6.针对上述不足,本发明的目的是提供一种阀门性能智能检测装置及检测方法。
7.本发明提供了如下的技术方案:一种阀门性能智能检测装置,包括:旋转座,其设于机体上,并由步进电机驱动转动;若干个夹持臂,其沿环形固接于旋转座上,夹持臂用于夹持或卸载阀体,并将阀体一端与设于机体上的充气组件连接,充气组件用于向阀体内充入检测气体;检测组件,其安装于设于机体上的驱动机构一上,驱动机构一用于驱动检测组件接近或远离夹持臂,检测组件用于检测阀体另一端是否有检测气体泄露;
控制端,其与步进电机、充气组件、检测组件、驱动机构一电性连接;所述夹持臂包括设有安装槽的臂体,位于安装槽槽口处的臂体上装有电动夹爪安装槽内设有装于滑轨一上的滑动座,滑动座由驱动机构二驱动沿靠近或远离通孔方向做直线运动;滑动座上可转动地安装有连接管一,连接管一由装于滑动座上的驱动机构三驱动转动;连接管一靠近通孔一端装有设有外螺纹的连接管二,连接管二背离通孔一端插有连接管三,连接管一和连接管三间装有密封轴承;连接管三与滑动座固接,连接管三通过软管与臂体上端设有的对接口贯通连接。
8.所述安装槽内还装有控制器和蓄电池,臂体上端装有控制按钮;蓄电池、电动夹爪、控制按钮、驱动机构三、驱动机构二均与控制器电性连接;控制器与控制端无线通信连接;所述机体上设有位于夹持臂下方的良品框和废品框,位于良品框和废品框一侧的机体上均固接有支架一,支架一上固接有与控制端电性连接的电动气缸,电动气缸的活塞杆一端固接有按压头。
9.所述充气组件包括固接于机体上的支架二,支架二上固接有支撑台,支撑台上安装有升降装置,升降装置用于驱动对接头做竖向直线运动;对接头通过气管与支撑台上固接的电磁阀连接;电磁阀与供气管连接,并与控制端电性连接。
10.所述检测组件包括密封罩体,密封罩体通过连接架与驱动机构一连接;密封罩体的检测腔腔壁上装有与控制端电性连接的检测气体传感器;密封罩体开口端相对称地安装有一对密封盖;密封盖通过传动杆与驱动机构四连接,驱动机构四用于驱动一对密封盖相向或相背运动,驱动机构四与控制端电性连接。
11.密封盖内侧与检测腔腔口间连接有弹性膜;密封盖上设有密封凸缘,所述臂体外侧设有密封凹槽。
12.所述连接管二可拆卸地与连接管一连接;滑轨一一侧设有滑轨二,滑轨二的滑块二上固接有与控制器电性连接的限位开关;安装槽内还装有滑轨三,滑轨三的滑块三上固接有与控制器电性连接的卸料气缸,卸料气缸的活塞杆一端固接有橡胶块。
13.滑块二和滑块三一侧均固接有固定组件,固定组件包括固定块,固定块设有的螺纹孔内安装有螺栓。
14.所述通孔的孔壁设有定位槽,定位槽内可滑动地安装有定位卡块,定位卡块内侧固接有导杆,导杆插进臂体设有的导槽内;定位卡块外侧两端设有圆弧面;定位卡块内侧与定位槽槽底间连接有弹簧;定位卡块内侧还固接有吸附块,定位槽槽底固接有与控制器电性连接的电磁铁。
15.所述连接管一上固接有齿轮一;所述驱动机构三包括固接于滑动座上、并与控制器电性连接的电机,电机的电机轴上固接有齿轮二,齿轮二与齿轮一啮合。
16.一种阀门性能智能检测装置的检测方法,包括以下步骤:s1、根据待测阀体的尺寸规格,调整限位开关、卸料气缸的位置,并设定滑动座在
驱动机构二驱动下的进给量;安装对应型号的连接管二;s2、将阀体插进通孔内,当定位卡块在弹簧弹力作用下卡进阀体表面凹槽时,控制电动夹爪将处于通孔外的阀体夹持住;s3、控制驱动机构三驱动连接管一转动,并控制驱动机构二驱动滑动座朝阀体运动;当滑动座一侧与限位开关接触,驱动机构三和驱动机构二停止运作,此时连接管二旋进阀体一端的螺纹进气孔内;s4、控制步进电机驱动旋转座旋转,直至夹持有待测阀体的夹持臂处于充气组件下方;控制升降装置带动对接头向下运动,直至对接头插进对接口内;控制驱动机构一驱动检测组件朝夹持有待测阀体的夹持臂运动,直至密封盖与密封凹槽对应;控制驱动机构四驱动一对密封盖相向运动,令密封凸缘插进密封凹槽内;s5、控制电磁阀开启,向阀体内充入检测气体;检测气体传感器探测检测腔内有无检测气体泄露,控制端记录探测信息;s6、控制升降装置带动对接头向上运动,直至对接头离开对接口;控制驱动机构四驱动一对密封盖相背运动,令密封凸缘离开密封凹槽;控制驱动机构一驱动检测组件朝远离夹持臂方向运动,直至检测组件退回原位;s7、控制步进电机驱动旋转座旋转;当夹持有合格阀体的夹持臂运动到良品框上方时,控制处于良品框上方的电动气缸驱动按压头向下运动,当按压头触碰到控制按钮时,控制驱动机构三驱动连接管一反向转动,并控制驱动机构二驱动滑动座朝远离阀体方向运动,令连接管二旋出阀体一端的螺纹进气孔;给电磁铁通电,电磁铁吸附住吸附块,令定位卡块离开阀体表面凹槽,并控制电动夹爪松开阀体,控制卸料气缸驱动活塞杆将阀体推离通孔,合格的阀体落入良品框内;当夹持有不合格阀体的夹持臂运动到废品框上方时,控制处于废品框上方的电动气缸驱动按压头向下运动,当按压头触碰到控制按钮时,控制驱动机构三驱动连接管一反向转动,并控制驱动机构二驱动滑动座朝远离阀体方向运动,令连接管二旋出阀体一端的螺纹进气孔;给电磁铁通电,电磁铁吸附住吸附块,令定位卡块离开阀体表面凹槽,并控制电动夹爪松开阀体,控制卸料气缸驱动活塞杆将阀体推离通孔,不合格的阀体落入废品框内;s8、夹持臂旋转到上料工位,等待下次上料。
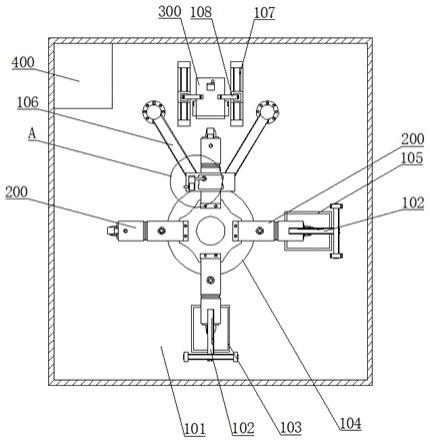
17.本发明的有益效果是:1、本发明可方便快捷地将阀体固定,并可将阀体与供气装置连接,从而可以自动对阀体进行密封性检测,并可以根据检测结果对阀体自动分类;2、本发明通过设置可更换的连接管二,并设置可调位置的限位开关和卸料气缸,从而可以对不同规格型号的阀体进行检测通过设置定位卡块,可以提高连接管二与阀体连接的精确度;3、本发明通过安装蓄电池供电,并设置控制按钮以及通过进给连接的充气组件和检测组件,可以避免因旋转座旋转导致线路、管道缠绕。
附图说明
18.图1是本发明的结构示意图;
图2是本发明的电动气缸安装示意图;图3是图1中a处放大图;图4是本发明的充气组件结构示意图;图5是本发明的检测组件结构示意图;图6是本发明的夹持臂俯视图;图7是本发明的夹持臂内部结构示意图;图8是图7中b处放大图;图9是图7中c处放大图;图10是图7中d处放大图;图11是图7中e处放大图;图12是图7中f处放大图。
19.图中标记为:机体101、支架一102、废品框103、旋转座104、良品框105、支架二106、驱动机构一107、连接架108、电动气缸109、按压头110、支撑台111、电磁阀112、升降装置113、对接头114、夹持臂200、臂体201、控制按钮202、密封凹槽203、对接口204、电动夹爪205、阀体206、定位卡块207、导杆208、弹簧209、电磁铁210、吸附块211、连接管二212、滑轨一213、控制器214、滑动座215、蓄电池216、驱动机构二217、连接管一218、滑轨三219、卸料气缸220、橡胶块221、固定块222、滑轨二223、限位开关224、齿轮一227、齿轮二228、电机229、轴承230、连接管三231、密封轴承232、软管233、检测组件300、密封罩体301、密封盖302、检测腔303、弹性膜304、检测气体传感器305、密封凸缘306、驱动机构四307、传动杆308、控制端400。
具体实施方式
20.实施例一如图所示,一种阀门性能智能检测装置,包括机体101和控制端400,在机体101上安装有旋转座104,旋转座104由步进电机驱动转动,步进电机与控制端400电性连接,可通过控制端400设定步进电机的运转参数。
21.在旋转座104上沿环形均匀固定安装有若干个夹持臂200,可以通过夹持臂200夹持或卸载阀体206,并可以通过夹持臂200将阀体206一端与设于机体101上的充气组件连接,充气组件用于向阀体206内充入检测气体。在机体101上还安装有驱动机构一107,驱动机构一107上安装有检测组件300,可以通过驱动机构一107驱动检测组件300接近或远离夹持臂200,当检测组件300接近夹持臂200后,可通过检测组件300检测阀体206另一端是否有检测气体泄露。驱动机构一107可选用常见的电动直线滑台。充气组件、检测组件300、驱动机构一107均与控制端400电性连接,因此可以通过控制端400控制充气组件是否进行充气、通过控制端400查看检测结果及记录检测结果、通过控制端400控制驱动机构一107。
22.安装槽内还装有控制器214和蓄电池216,通过蓄电池216给控制器214供电,可以避免电线与夹持臂200连接,从而避免夹持臂200旋转时,造成电线缠绕。
23.具体地,夹持臂200包括设有安装槽的臂体201,位于安装槽槽口处的臂体201上装有电动夹爪205,电动夹爪205用于夹持住阀体206。安装槽内设有装于滑轨一213上的滑动座215,滑动座215由驱动机构二217驱动沿靠近或远离通孔方向做直线运动。驱动机构二
217可以选用常见的电动直线滑台,也可以选用电动气缸。
24.滑动座215上可转动地安装有连接管一218,具体地,连接管一218安装于滑动座215上的轴承230内。连接管一218由装于滑动座215上的驱动机构三驱动转动。具体地,连接管一218上固定安装有齿轮一227,驱动机构三包括固定安装于滑动座215上、并与控制器214电性连接的电机229,电机229的电机轴上固定安装有齿轮二228,齿轮二228与齿轮一227啮合。电机229可驱动电机轴带动连接管一218转动。
25.连接管一218靠近通孔一端装有设有外螺纹的连接管二212,连接管二218背离通孔一端插有连接管三231,连接管一218和连接管三231间装有密封轴承232。连接管三231与滑动座215固定连接,连接管三231通过软管233与臂体201上端设有的对接口204贯通连接。
26.通过驱动机构二217驱动滑动座215朝阀体206运动,并通过驱动机构三同时驱动连接管一218转动,从而可以将连接管二212旋进阀体206的螺纹进气孔内。通入软管233内的检测气体,可以依次通过连接管三231、连接管一218、连接管二212通入阀体206内。
27.在臂体201上端装有控制按钮202。电动夹爪205、控制按钮202、驱动机构三、驱动机构二217均与控制器214电性连接,控制器214与控制端400无线通信连接,从而可以避免夹持臂200通过线路与其他设备连接,可以避免夹持臂200转动时发生线路缠绕。
28.在机体101上设有位于夹持臂200下方的良品框105和废品框103,位于良品框105和废品框103一侧的机体101上均固定连接有支架一102,支架一102上固定安装有与控制端400电性连接的电动气缸109,电动气缸109的活塞杆一端固定连接有按压头110。当检测合格的阀体206位于良品框105上方时,控制电动气缸109驱动活塞杆带动按压头110按压控制按钮202,令夹持臂200完成卸料动作,使检测合格的阀体206落入良品框105内;当检测不合格的阀体206位于废品框103上方时,控制电动气缸109驱动活塞杆带动按压头110按压控制按钮202,令夹持臂200完成卸料动作,使检测不合格的阀体206落入废品框103内。
29.充气组件包括固定连接于机体101上的支架二106,支架二106上固定连接有支撑台111,支撑台111上安装有升降装置113,升降装置113用于驱动对接头114做竖向直线运动,升降装置113现有技术中较为常见。对接头114通过气管与支撑台111上固定连接的电磁阀112连接。电磁阀112与供气管连接,并与控制端400电性连接,可通过控制端400控制电磁阀112启闭,从而控制充气。
30.检测组件300包括密封罩体301,密封罩体301通过连接架108与驱动机构一107连接。密封罩体301的检测腔303腔壁上装有与控制端400电性连接的检测气体传感器305,检测气体传感器305可检测检测腔303内是否出现检测气体时,并将检测信息传输到控制端400,控制端400通过检测信息判断检测的阀体206是否为合格品,并记录检测信息,并根据检测信息控制夹持臂200将已检测的阀体206在良品框105还是废品框103上方进行卸料。
31.密封罩体301开口端相对称地安装有一对密封盖302,密封盖302通过传动杆308与驱动机构四307连接,可以通过驱动机构四307驱动一对密封盖302相向或相背运动,驱动机构四307与控制端400电性连接,驱动机构四307可以选用电动气缸。
32.为了提高密封效果,防止检测气体泄露,在密封盖302内侧与检测腔303腔口间连接有弹性膜304,选用具有弹性的弹性膜304,可以适应密封盖302的开合状态。在密封盖302上设有密封凸缘306,在臂体201外侧设有密封凹槽203。待检测的阀体206运动到检测工位后,驱动机构一107驱动密封罩体301朝夹持臂200运动,并令阀体206外露的一端插进检测
腔303内,令密封盖302与臂体201上的密封凹槽203对应,通过驱动机构四307驱动一对密封盖302相向运动,从而令密封盖302嵌进密封凹槽203内,从而完成密封,避免检测气体泄露。之后通过控制升降装置113带动对接头114插进臂体201上的对接口204内,并令电磁阀112开启,从而可以向阀体206内充气。
33.为了使得此设备可以对不同阀体206进行检测,令连接管二212可拆卸地与连接管一218连接。具体地,连接管二212通过法兰与连接管一218连接。在滑轨一213一侧设有滑轨二223,滑轨二223的滑块二上固定连接有与控制器214电性连接的限位开关224。当滑动座215运动到设定位置,与限位开关224接触时,控制器214控制驱动机构二217和驱动机构三停止运转,从而防止连接管二运动过限。
34.在安装槽内还装有滑轨三219,滑轨三219的滑块三上固定连接有与控制器214电性连接的卸料气缸220,卸料气缸220的活塞杆一端固定连接有橡胶块221。针对不同型号的阀体206,可调整卸料气缸220的位置,从而令卸料气缸220既不会阻碍滑动座215运动,又能够令橡胶块221对准阀体206。
35.在滑块二和滑块三一侧均固定连接有固定组件,固定组件包括固定块222,固定块222与滑块二或滑块三固定连接,固定块222设有的螺纹孔内安装有螺栓221,将滑块二或滑块三调整到合适位置后,通过拧紧螺栓221,令螺栓221抵住安装槽的槽底,从而令滑块二、滑块三无法运动,从而避免卸料气缸220、限位开关224移位。
36.为了令向通孔内插进阀体206时,阀体206正好插进了设定的深度,在通孔的孔壁上设有定位槽,定位槽内可滑动地安装有定位卡块207,定位卡块207内侧固定连接有导杆208,导杆208插进臂体201设有的导槽内。在定位卡块207外侧两端设有圆弧面,从而方便定位卡块207能顺利卡进阀体206表面的凹槽内。定位卡块207内侧与定位槽槽底间连接有弹簧209,在定位卡块207内侧还固定连接有吸附块211,定位槽槽底固定连接有与控制器214电性连接的电磁铁210。插进阀体206时,阀体206与定位卡块207接触,弹簧209被压缩,当定位卡块207运动到阀体206表面设有的凹槽处时,定位卡块207在弹簧209弹力作用下弹出,与阀体206发生碰撞,发出“啪嗒”声,此时即表明阀体206已经插进了适当的深度。当需要卸下阀体206时,给电磁铁210通电,令定位卡块207离开凹槽,从而方便阀体206被卸料气缸220的活塞杆推出。
37.实施例二一种阀门性能智能检测装置的检测方法,包括以下步骤:s1、根据待测阀体206的尺寸规格,调整限位开关224、卸料气缸220的位置,并设定滑动座215在驱动机构二217驱动下的进给量;安装对应型号的连接管二212;s2、将阀体206插进通孔内,当定位卡块207在弹簧209弹力作用下卡进阀体206表面凹槽时,控制电动夹爪205将处于通孔外的阀体206夹持住;s3、控制驱动机构三驱动连接管一218转动,并控制驱动机构二217驱动滑动座215朝阀体206运动;当滑动座215一侧与限位开关224接触,驱动机构三和驱动机构二217停止运作,此时连接管二212旋进阀体206一端的螺纹进气孔内;s4、控制步进电机驱动旋转座104旋转,直至夹持有待测阀体206的夹持臂200处于充气组件下方;控制升降装置113带动对接头114向下运动,直至对接头114插进对接口204内;
控制驱动机构一107驱动检测组件300朝夹持有待测阀体206的夹持臂200运动,直至密封盖302与密封凹槽203对应;控制驱动机构四307驱动一对密封盖302相向运动,令密封凸缘306插进密封凹槽203内;s5、控制电磁阀112开启,向阀体206内充入检测气体;检测气体传感器305探测检测腔303内有无检测气体泄露,控制端400记录探测信息;s6、控制升降装置113带动对接头114向上运动,直至对接头114离开对接口204;控制驱动机构四307驱动一对密封盖302相背运动,令密封凸缘306离开密封凹槽203;控制驱动机构一107驱动检测组件300朝远离夹持臂200方向运动,直至检测组件300退回原位;s7、控制步进电机驱动旋转座104旋转;当夹持有合格阀体206的夹持臂200运动到良品框105上方时,控制处于良品框105上方的电动气缸109驱动按压头110向下运动,当按压头110触碰到控制按钮202时,控制驱动机构三驱动连接管一218反向转动,并控制驱动机构二217驱动滑动座215朝远离阀体206方向运动,令连接管二212旋出阀体206一端的螺纹进气孔;给电磁铁210通电,电磁铁210吸附住吸附块211,令定位卡块207离开阀体206表面凹槽,并控制电动夹爪205松开阀体206,控制卸料气缸220驱动活塞杆将阀体206推离通孔,合格的阀体206落入良品框105内;当夹持有不合格阀体206的夹持臂200运动到废品框103上方时,控制处于废品框103上方的电动气缸109驱动按压头110向下运动,当按压头110触碰到控制按钮202时,控制驱动机构三驱动连接管一218反向转动,并控制驱动机构二217驱动滑动座215朝远离阀体206方向运动,令连接管二212旋出阀体206一端的螺纹进气孔;给电磁铁210通电,电磁铁210吸附住吸附块211,令定位卡块207离开阀体206表面凹槽,并控制电动夹爪205松开阀体206,控制卸料气缸220驱动活塞杆将阀体206推离通孔,不合格的阀体206落入废品框103内;s8、夹持臂200旋转到上料工位,等待下次上料。
38.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。