1.本发明涉及角度测量领域,具体涉及一种转台控制系统的低成本高精度角度实时测量装置。
背景技术:
2.大型重载高精度转台需要获得精确的角度数据反馈,才能完成高精度的位置控制和快速的响应特性。转台位置的高精度角度测量设计一直是大型重载转台的核心技术。同轴安装的多级旋转变压器具有结构简单稳定、抗恶劣环境能力强、精度高等特点,因此,在大型重载高精度转台中得到广泛应用。
3.大型重载高精度转台内部需同轴加装水绞链、汇流环等更多设备,如继续采用传统的轴角编码器同轴安装设计技术,安装空间和维护无法保证,迫切需要进行大中空转台高精度角度测量系统设计。目前多采用1:n粗、精同步轮系(含旋转变压器)加编码盒的综合角度解算技术,运算出大型重载转台所需的18位角码值。但编码盒需要两套,编码盒内含旋变数字变换模块(rdc),成本较高。由于某些大型重载转台为非连续转动,工作范围有限,迫切需要在大型重载转台具备实现低成本高精度的测角系统。
技术实现要素:
4.本发明针对大型重载转台非连续转动提供一种性能可靠、维护方便、低成本高精度的角度实时测量装置。
5.为实现上述目的,本发明采用的技术方案为:一种低成本高精度转台角度实时测量装置,包括:转台角度数据采集单元、精同步轮系角码采集盒、开关信号采集盒、精同步轮系单元、转台旋转轴单元、位置开关组合单元,其中,精同步轮系角码采集盒包括:零点输入单元、数据输出单元、数据融合单元、开关信号接收单元、rdc变换单元和400hz励磁单元;开关信号采集盒包括:开关信号输出单元、开关信号采集单元和光耦隔离单元;精同步轮系单元包括多极旋转变压器单元和1:n速比同步轮系组;转台角度数据采集单元与精同步轮系角码采集盒、开关信号采集盒均以现场总线连接,精同步轮系角码采集盒采集多极旋转变压器单元的转台旋转轴角度,并与开关信号采集盒的开关信号输出单元进行组合,经数据融合单元组合为转台旋转轴角度原码值,转台旋转轴角度原码值与零点输入单元组合,获得转台旋转轴与大地水平的真实角度。
6.进一步的,转台旋转轴单元的角度模拟量信号经1:n速比同步轮系组传递给多极旋转变压器单元,由精同步轮系角码采集盒中的rdc变换单元转换为转台旋转轴角度数字量。
7.进一步的,转台角度数据采集单元输入的粗角零点输入扣除角度零值后,作为高精度角度原码。
8.进一步的,开关信号采集盒采集位置开关组合单元的开关信号,并通过光耦隔离单元,由开关信号采集单元采集为开关量(0/1),再通过开关信号输出单元同时发送给精同
步轮系角码采集盒的开关信号接收单元和转台角度数据采集单元。
9.进一步的,开关信号接收单元接收到的位置开关组合单元的开关量,与高精度角度原码经过数据融合单元融合,合成转台旋转轴角码,通过数据输出单元发送给转台角度数据采集单元。
10.进一步的,精角400hz励磁207单元同时送给rdc变换206和旋转变压器211。
11.本发明的高精度转台角度实时测量装置相对于现有技术具有以下优点:。
12.1.采用基于旋转变压器的同步轮系设计,以转台外挂旋转变压器,所以不用考虑大型重载高精度转台中空大小。继承多极旋转变压器的设计思想,以转台外挂旋转变压器与开关信号的组合方式实现转台旋转轴角度的高精度测量,便于后期维护保养。
13.2.精同步轮系角码采集盒实时采集精同步轮系中旋转变压器模拟角度信号,与开关量组成实时高精度角度采集系统,内置励磁信号、粗精扣零接口,优化了伺服系统的硬件组成。
14.3.与多组同步轮系角码采集盒的数据组合相比,由于开关信号采集盒系统简单,成本低廉,简化了系统架构,同时降低接近一半的硬件成本。
附图说明
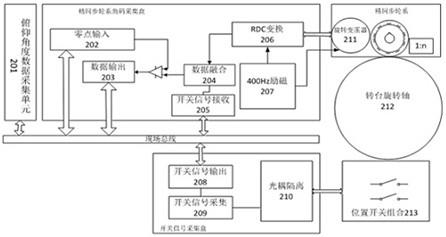
16.1.图1 为本发明的转台角度实时测量系统框图。
17.2.图2为本发明的转台角度实时测量系统流程图。
18.附图标记说明:201、转台角度数据采集单元;202、零点输入单元;203、数据输出单元;204、数据融合单元;205、开关信号接收单元;206、rdc变换单元;207、400hz励磁单元;208、开关信号输出单元;209、开关信号采集单元;210、光耦隔离单元;211、旋转变压器单元;212、转台旋转轴单元;213、位置开关组合单元。
具体实施方式
20.下面结合附图详细描述本发明的具体实施方式。
21.结合附图1,低成本高精度角度实时测量装置包括:大型重载转台角度数据采集单元201、精同步轮系角码采集盒、开关信号采集盒、精同步轮系单元、转台旋转轴单元212、位置开关组合单元213,其中,精同步轮系角码采集盒包括:零点输入单元202、数据输出单元203、数据融合单元204、开关信号接收单元205、rdc变换单元206和400hz励磁单元207;开关信号采集盒包括:开关信号输出单元208、开关信号采集单元209和光耦隔离单元210;精同步轮系单元包括多极旋转变压器单元211和1:n速比同步轮系组;转台角度数据采集单元与精同步轮系角码采集盒、开关信号采集盒均以现场总线连接,精同步轮系角码采集盒采集多极旋转变压器单元的转台旋转轴角度,并与开关信号采集盒的开关信号输出单元进行组合,经数据融合单元组合为转台旋转轴角度原码值,转台旋转轴角度原码值与零点输入单元组合,获得转台旋转轴与大地水平的真实角度。
22.转台角度数据采集单元与精同步轮系角码采集盒、开关信号采集盒均以现场总线连接,精同步轮系角码采集盒采集多极旋转变压器单元211的转台旋转轴角度,并与开关信号采集盒的开关信号输出单元208进行组合,经数据融合单元204组合为转台旋转轴角度原码值,转台旋转轴角度原码值与零点输入单元202组合,获得转台旋转轴与大地水平的真实
角度。精同步轮系单元内含1只32对极旋转变压器单元211及1:5同步轮系组。转台角度数据采集单元输入的粗角零点输入扣除角度零值后,作为高精度角度原码,反映转台旋转轴在1/n圈的角度变化。开关信号采集盒采集位置开关组合单元213的开关信号,并通过光耦隔离单元210,由开关信号采集单元209采集为开关量(0/1),再通过开关信号输出单元208同时发送给精同步轮系角码采集盒的开关信号接收单元205和转台角度数据采集单元201。开关信号接收单元205接收到的位置开关组合单元的开关量,与高精度角度原码经过数据融合单元204融合,合成转台旋转轴角码,通过数据输出单元203发送给转台角度数据采集单元201。精角400hz励磁单元207同时送给rdc变换单元206和旋转变压器单元211。
23.本发明的转台角度实时测量装置的工作原理如下:。
24.转台旋转轴单元212的角度模拟量信号经1:n速比传递给精同步轮系中的旋转变压器单元211,由精同步轮系角码采集盒的rdc变换单元206将旋转变压器单元211产生的角度模拟量信号转换为角度数字量。该角度数字量作为高精度角度原码,反映转台旋转轴单元在1/n圈的角度变化。位置开关组合单元213包含有m个开关(),均匀分布在转台转轴。开关信号采集盒采集位置开关组合单元213的开关信号,并通过光耦隔离单元210,由开关信号采集盒209采集为开关量(0/1),再由开关信号输出单元208通过现场总线发送给精同步轮系角码采集盒的开关信号接收单元205。精同步轮系角码采集盒的开关信号接收单元205实时接收现场总线的开关量信号,与高精度角度原码数据经过数据融合单元204数据融合,合成转台旋转轴高精度角码,再与零点输入单元202组合扣除角度零值后(零值由转台角度数据采集单元201通过现场总线发给零点输入单元202),由数据输出单元203通过现场总线发送给转台角度数据采集单元201。精角400hz励磁单元207同时送给rdc变换单元206和旋转变压器单元211。转台角度数据采集单元201实时接收现场总线上的开关量信号用于显示开关量信号状态供系统监控。
25.其中,开关位置的设定原则为:m个开关可以测量的范围为:(速比n为有理数)。将相邻两个开关之间的安装设定为精角码转动一整圈左右的位置,即精角码每转动一圈,至少有一个开关信号发生变化。一个开关有断开和闭合两种状态,表示为0和1。例如:在第一个开关处于断开的状态,精角码转动一圈的角度值变化为:0~。接下来精角码再转动一圈,由于第一个开关状态由断开变为闭合,则精角码再转动一圈的角度值变化为:,即为。这样,连续转动两圈,由于第一个开关状态可以对精角转动圈数(第一圈还是第二圈)的分辨,则精角码反映转台角度的范围为:。多个开关的组合以此类推。
26.本发明优选实施例工作原理如下:。
27.转台旋转轴单元212的角度模拟量信号经1:5速比传递给精同步轮系中的32对极旋转变压器单元211,由精同步轮系角码采集盒的rdc变换单元206转换为转台旋转轴角度数字量,反映转台旋转轴在72
°
范围的角度变化。位置开关组合单元213包含有2个开关,分布在转台旋转轴转轴大约62
°
(考虑需要反映转台旋转轴0
°
以下大约10
°
工作范围)和134
°
(62
°
72
°
)位置。开关信号采集盒采集位置开关组合单元213的开关信号,并通过光耦隔离单元210,由开关信号采集单元209采集为开关量(0/1),再通过开关信号输出单元208同时发送给精同步轮系角码采集盒的开关信号接收单元205和转台角度数据采集单元201。开关信号接收单元205接收到的位置开关组合单元213的开关量,与高精度角度原码数据经过数据融合单元204融合,合成转台旋转轴角码,再与零点输入单元208组合扣除角度零值后,通过数据输出单元203发送给转台角度数据采集单元201。精角400hz励磁单元207同时送给rdc变换单元206和精同步轮系中的32对极旋转变压器单元211。
28.结合图2,开关信号采集盒采集位置开关组合单元213的两个开关量信号并定时发送至精同步轮系角码采集盒。同时,精同步轮系角码采集盒首先通过rdc变换206将精同步轮系中旋转变压器单元211的角度模拟量信号变换为角度数字量。该角度数字量与通过开关信号接收单元205接收到的开关量信号经过精同步轮系角码采集盒的数据融合单元204,形成转台旋转轴角度数据。该数据与零点输入单元202相加即为转台旋转轴实际角度。具体来说,在第一段,精同步轮系从零开始顺时针转动一圈后,位置开关组合单元213的开关1信号由0变为1,开关2信号不变化;第一段的转台旋转轴角度值即为,精同步轮系角码采集盒通过变换得到的角度数据。第二段,当旋转变压器单元211继续顺时针转动一圈后,开关1信号不变(仍为1),开关2信号由0变为1;第二段的转台旋转轴角度即为精同步轮系角码采集盒通过rdc变换得到的角度数据 72
°
。第三段,当旋转变压器单元211继续顺时针转动一圈后,开关1信号由1变为0,开关2信号不变化(仍为1);第三段的转台旋转轴角度即为精同步轮系角码采集盒通过rdc变换得到的角度数据 144
°
(72
°×
2)。第四段,当精同步轮系单元继续顺时针转动一圈后,开关1信号不变(仍为0),开关2信号由1变为0;第四段转台旋转轴角度即为精同步轮系角码采集盒通过rdc变换得到的角度数据 216
°
(72
°×
3)。实际上,一般转台旋转轴工作范围不超过200
°
,所以只用到前三段即可实现角度组合。
29.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。