本发明涉及内燃机,更具体地涉及一种用于内燃机的控制系统。
背景
为了提高内燃机的效率以及与排放有关的性能,气缸直喷系统已经逐渐形成。通过将燃料直接注入内燃机的燃烧室或进气歧管,可以获得许多优点。这些优点中的一个就是能够以低于化学计量的混合物运行发动机。
在各种类型的发动机中,例如在单缸内燃机中,点火系统由控制单元控制。控制单元控制曲柄轴的运动和点火系统的点火。因此,控制单元控制曲柄轴的运动和点火系统的点火,使得点火系统在曲柄轴向前旋转期间、即在活塞从TDC运动至BDC时进行点火。控制单元还确保在曲柄轴反向旋转期间、即在活塞从BDC运动至TDC时,来自点火系统的点火被抵制。
然而,在某些类型的发动机中、例如在控制单元控制点火系统而诸如ISG ACG控制器之类的单独的控制器控制曲柄轴的运动的情况下,往往难以确保在曲柄轴反向旋转期间,来自点火系统的点火被抵制。
概述
在本发明的一个方面中,提供了一种车辆。该车辆包括内燃机和控制系统。该内燃机包括由气缸盖和曲柄箱限定的燃烧室。该内燃机还具有设置在曲柄箱内的曲柄轴。该内燃机还包括设置在燃烧室内的火花塞,用于对其中的充气(charge)进行点火。内燃机包括流体联接于燃烧室的进气歧管和排气歧管。该内燃机还包括旋转电机,该旋转电机构造成在发动机启动时作为使内燃机的曲柄轴旋转的启动马达。内燃机包括设置在进气歧管内的歧管绝对压力传感器。MAP传感器构造成检测进气歧管内的压力。该内燃机还包括设有ISG的曲柄角度传感器。曲柄角度传感器构造成检测内燃机曲柄轴的角度位置和发动机转速。控制系统构造成控制内燃机。控制系统包括与MAP传感器、曲柄角度传感器进行电子通信的电子控制单元。电子控制单元构造成接收来自MAP传感器和曲柄角度传感器中的每一个的输出,以基于来自MAP传感器和曲柄角度传感器中的每一个的输出确定曲柄轴的旋转方向。
在一实施例中,电子控制单元还构造成响应于曲柄轴的旋转方向的确定而选择性地允许和限制火花塞的点火。在一实施例中,旋转电机安装在曲柄轴上,并包括至少一个基准齿和多个齿,其中,至少一个基准齿指示在曲柄轴上的预定位置,多个齿则沿着旋转电机周缘成角度地定位。自基准齿的多个齿中的每个齿都表示曲柄轴的预定角度位置。
在一实施例中,基准齿具有预定的轮廓或者呈缺齿形式。在一实施例中,MAP传感器响应于感应到的进气歧管中的压力生成电压信号,并且曲柄角度传感器生成指示曲柄角度位置的电压信号。由MAP传感器和曲柄角度传感器生成的电压信号被传送到电子控制单元。
在一实施例中,如果由MAP传感器在PIP信号的预定时间生成的电压高于存储在电子控制单元内的预定阈值,则曲柄轴沿第一旋转方向(D1)旋转。在一实施例中,曲柄角度传感器生成指示曲柄轴角度位置的表面点火感测(PIP)信号。
在一实施例中,曲柄轴的旋转方向由电子控制单元基于MAP传感器在曲柄轴的预定角度位置处的电压信号来确定。在一实施例中,曲柄轴的预定角度位置是多个齿中位于基准齿之后的第一个齿。在一实施例中,如果MAP传感器在曲柄轴的预定角度位置处生成的电压高于存储在电子控制单元中的预定阈值,则曲柄轴沿第一旋转方向(D1)旋转。
在一实施例中,如果MAP传感器在曲柄轴的预定角度位置处生成的电压低于存储在电子控制单元中的预定阈值,则曲柄轴沿第二旋转方向(D2)旋转。在一实施例中,第一旋转方向(D1)是反方向,第二旋转方向(D2)是正方向。在一实施例中,旋转电机是集成式启动发电机(ISG)。在一实施例中,曲柄角度传感器是脉冲线圈。在一实施例中,曲柄角度传感器是霍尔效应传感器。在一实施例中,电子控制单元(ECU)不允许对火花塞进行点火,直到它确定曲柄轴的旋转方向为止。
在一实施例中,曲柄轴的旋转方向由电子控制单元基于MAP传感器在曲柄轴的第一预定角度位置处的第一电压信号和MAP传感器在曲柄轴的第二预定角度位置处的第二电压信号来确定。
在一实施例中,如果MAP传感器在曲柄轴的第一预定角度位置处生成的第一电压和MAP传感器在曲柄轴的第二预定角度位置处生成的第二电压高于存储在电子控制单元中的预定阈值,则曲柄轴沿第一旋转方向(D1)旋转;并且如果MAP传感器在曲柄轴的第一预定角度位置处生成的第一电压和MAP传感器在曲柄轴的第二预定角度位置处生成的第二电压低于存储在电子控制单元中的预定阈值,则曲柄轴沿第二旋转方向旋转。
在本发明的另一方面,提供了一种由控制系统控制内燃机的方法。该方法包括经由歧管绝对压力(MAP)传感器感应进气歧管中的空气压力;生成代表所感应的空气压力的MAP电压信号;经由曲柄角传感器感应内燃机曲柄轴的角度位置;生成代表曲柄轴的角度位置的电压信号;以及基于在曲柄轴的预定位置处生成的MAP电压信号,由电子控制装置确定曲柄轴的旋转方向。
在一实施例中,电子控制单元基于所确定的曲柄轴旋转方向来控制火花塞的火花。在一实施例中,如果MAP传感器在曲柄轴的预定角度位置处生成的电压高于存储在电子控制单元中的预定阈值,则曲柄轴沿第一旋转方向(D1)旋转,其中,当确定曲柄轴的第一旋转方向(D1)旋转时,电子控制单元限制火花塞的火花。
在一实施例中,如果MAP传感器在曲柄轴的预定角度位置处生成的电压高于存储在电子控制单元中的预定阈值,则曲柄轴沿第二旋转方向(D2)旋转,其中,当确定曲柄轴的第一旋转方向(D2)旋转时,电子控制单元允许火花塞的火花。
附图简介
结合附图考虑以下具体实施方式,本发明本身以及其它特征和注意到的优点将变得明显。现在仅借助于示例来描述本发明的一个或多个实施例,其中相同的附图标记表示相同的元件,并且附图中:
图1示出了根据本发明的实施例的示例性两轮车的侧视图;
图2示出了本发明的实施例的示例性两轮车的框架的立体图;
图3示出了根据本发明的实施例的车辆的控制系统和内燃机的示意图;
图4示出了根据本发明实施例的内燃机的参数图;
图5示出了根据本发明实施例的内燃机的参数图;
图6示出了根据本发明实施例的由控制系统控制内燃机的方法;
除非特别说明,否则不应将本说明书中提及的附图理解为按比例绘制,并且这种附图在本质上仅是示例性的。
详述
尽管本发明易于进行各种变型和替代形式,但是已经在附图中借助于示例示出了本发明的实施例,并且以下将在本文中描述。然而,应当理解,本发明并非旨在将本发明限于所公开的特定形式,而是相反,本发明将涵盖落入本发明的精神和范围内的所有变型、等效物和替代物。
术语“包括”、包含或它们的任何其它变型旨在涵盖非排它性的包含,使得包含部件或步骤的列表的设置、结构或方法不仅只包括那些部件或步骤,而且可以包括未明确列出的或者这种设置、结构或方法固有的其它部件或步骤。换言之,在没有更多约束的情况下,以包括搮一个厰开头的系统或装置中的一个或多个元件不排除在系统或装置中存在其它元件或附加元件。
为了更好地理解本发明,现在将参考附图和下面的描述中所示的实施例,并且,在下面的附图中,相同的附图标记用于在各种视图中识别相同的部件。
在本发明的一方面,示出了内燃机的控制系统。该内燃机包括至少一个燃烧室、与燃烧室连通的进气歧管、用于将燃料直接射入燃烧室的燃料喷射器、以及定位在燃烧室上的至少一个火花塞,用于对其中的充气进行点火。该控制系统包括设置在进气歧管上的MAP传感器,该MAP传感器构造成测量进气歧管压力;曲柄角度传感器,该曲柄角度传感器构造成确定内燃机的曲柄轴的位置;控制模块,该控制模块适于接收MAP传感器和曲柄角度传感器中每一个的输出以确定曲柄轴的反向旋转;以及与控制模块和火花塞交互的点火系统,其中,该控制系统在曲柄轴反向旋转期间通过点火系统限制火花塞的点火。
然而,尽管是就车辆的上下文来说明了本发明,但是,控制系统和内燃机及其各方面和特征也能够与其它类型的车辆一起使用。术语“车辆”、“两轮车”和“摩托车”在整个说明书中已互换地使用。术语“车辆”包括诸如摩托车、踏板车、自行车、轻便摩托车、踏板型车辆、全地形车(ATV)等之类的车辆。
本文中使用的“术语前/向前”、“后/向后/后方/向后方”、“上/向上/顶”、“下/更低/向更低/向下、底”、“左/向左”、“右/向右”表示车辆驾驶员跨坐时看到的方向,并且这些方向由附图中的箭头Fr、Rr、U、Lr、L、R来表示。
参照图1,示出根据本发明的实施例的车辆(10)。本文所指的车辆(10)实施为两轮摩托车。替代地,在不限制本发明的范围的情况下,车辆(10)可实施为任何其它骑乘型车辆,诸如踏板车、三轮车、全地形车(ATV)之类等。
车辆(10)包括一个或多个诸如框架(12)之类的主体部、车把(14)、前轮(16)、座位(18)、后轮(20)、内燃机(22)、前照灯(24)和燃料箱(26)。框架(12)支承位于车辆(10)中间部分中的内燃机(22)(下文中还可称为发动机(22))。在示出的示例中,发动机(22)提供驱动车辆(10)的后轮(20)所需的必要动力。替代地,在不限制本发明的范围的情况下,发动机(22)可提供必要的动力,以驱动前轮(16)、或同时驱动前轮(16)和后轮(20)。后轮(20)通过传动机构(未标号)连接于发动机(22)。
框架(12)支承从车辆(10)的中间部分朝向后部部分(28)延伸的座位(18)。座位(18)为车辆(10)的驾驶员和/或乘客提供可坐的地方。燃料箱(26)向发动机(22)提供必要的燃料,以便在车辆(10)内产生动力。
如图2所示,车辆(10)的框架(12)包括前管(30)、主框架(32)和下框架(34)。主框架(32)从前管(30)的后部部分向下且向后延伸,以在侧视图中形成相对缓和的坡度。下框架(34)以分别向左右分支的方式向下且向后延伸,以在侧视图中形成相对陡峭的坡度。框架(12)包括成对下框架(36)。成对下框架(36)弯曲以从下框架(34)的下端向后延伸。
此外,框架(12)包括成对中间框架(38)。成对中间框架(38)从主框架横杆(40)向下且向后延伸。框架(12)包括安装支架(42),该安装支架(42)联接到成对中间框架(38)的下部部分的前侧。此外,框架(12)还包括成对副框架构件(50)。在一实施例中,成对副框架构件(50)实施为成对座位框架,该座位框架设置在该对相应的中间框架(38)的上端的后方。框架(12)还支承发动机(22)。
如图3所示,示出了用于控制发动机(22)的系统(300),该系统还称为控制系统(300)。发动机(22),也可互换地称为\"内燃机(22)\",包括曲柄箱(52)、连接于曲柄箱(52)的气缸(54)以及连接于曲柄箱(52)的头部部分(56)(还称为气缸盖(56))。在本公开的替代实施例中,内燃机(22)包括多个气缸,比如气缸(54),这些气缸以成直线方式或相对于彼此以一定角度定位。曲柄轴箱(52)包含曲柄轴(58),该曲柄轴连接于连接杆(60)。连接杆(60)连接于包含在气缸(54)内的活塞(62)。活塞(62)构造成在气缸(54)内运动,从而引起曲柄轴(58)旋转。由此,活塞(62)在其TDC(上死点)位置与BDC(下死点)位置之间运动,以使曲柄轴(58)沿着其旋转轴线(未示出)旋转。替代地,在内燃机(22)包括多个气缸的情况下,可存在多个活塞,比如活塞(62),这些活塞在相应的多个气缸内往复运动,并连接于曲柄轴(58)。
在一实施例中,内燃机(22)包括安装在气缸(54)上的进气部分(302)和排气部分(304)。具体地,还称为“进气歧管(302)”的进气部分(302)以及还称为“排气歧管(304)”的排气部分(304)连接于气缸(54)的顶部部分,即头部部分(56)。进气歧管(302)和排气歧管(304)流体联接于燃烧室(64)。
如图3所示,内燃机(22)还包括蝶形阀(306)、MAP传感器(308)、燃料喷射器(312)和进气阀(314)。进气部分(302)限定延伸到内燃机(22)的气缸(54)的通道。由进气部分(302)限定的通道经由进气阀(314)进入燃烧室(64)。蝶形阀(306)定位在进气部分(302)内。蝶形阀(306)通过其打开位置和关闭位置来允许和限制空气的进入。因此,蝶形阀(306)在打开位置允许空气进入,并且在关闭位置限制空气进入。在所示的示例中,控制系统(300)包括电子控制单元(ECU)(310)。在另一示例中,内燃机(22)包括电子控制单元(ECU)(310),并且电子地且电气地联接于车辆(100)的控制系统(300),而没有任何限制。
还称为“歧管绝对压力传感器(308)”的MAP传感器(308)定位到由进气部分(302)限定的通道上。MAP传感器(308)电联接于ECU(310)。在一实施例中,MAP传感器(308)包括定位在进气部分(302)内的探针(未标号)、从探针延伸至ECU(310)的传感器电压输出连接器(未标号)、从探针延伸至ECU(310)的接地连接器(未标号)、以及从探针延伸至ECU(310)的电源连接器(未标号)。
MAP传感器(308)响应于进气歧管(302)内感应到的压力生成电压信号。更具体地,MAP传感器(308)的探针适于测量进气部分(302)内的压力,并向ECU(310)提供对应的输出。在一实施例中,MAP传感器(308)的探针适于测量进气部分(302)内的压力,并向ECU(310)提供对应的电压输出。定位成与MAP传感器(308)相邻的燃料喷射器(312)连接于燃料泵(未示出)和燃料过滤器(316)。燃料喷射器(312)在ECU(310)的指令下,从燃料泵和燃料过滤器(316)向进气部分(302)供应燃料。因此,燃料喷射器(312)与ECU(310)交互。进气阀(314)定位在燃料喷射器(312)的上游,并且蝶形阀(306)也是如此。进气阀(314)选择性地通向燃烧室(64)。当进气阀(314)打开时,来自蝶形阀(308)和燃料喷射器(312)的进气被允许进入燃烧室(64)。同样地,当进气阀(314)关闭时,来自蝶形阀(308)和燃料喷射器(312)的进气不被允许进入燃烧室(64)。
如对于本领域的技术人员显而易见的,当还称为“充气”的进气接纳到燃烧室(64)中,并且当由控制器或ECU(310)控制的点火系统(319)引起火花塞(318)产生火花时,在燃烧室(64)对充气进行点火。燃烧室(64)内的充气被点火,导致活塞向后运动,随后燃烧的气体经由定位在内燃机(22)排气部分(304)内的排气阀(320)从燃烧室(64)排出。在一实施例中,O2传感器(未标号)设置在排气部分(304)上,与排气阀(320)相邻。
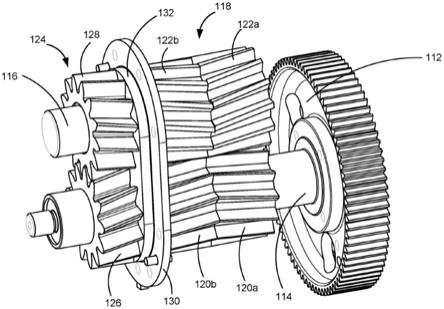
如图3所示,内燃机(22)还包括旋转电机(322)。在一示例中,旋转电机可以是集成式启动发电机(ISG)(322)。在一示例中,集成式启动发电机(322)可以是ISG ACG。具体地,集成式启动发电机(322)连接于内燃机(22)的曲柄轴(58)。集成式启动发电机(322)与ISG控制器(324)进行通信。ISG控制器(324)适于操作集成式启动发电机(322),即适于使集成式启动发电机(322)作为启动器或发电机可互换地发挥作用。对本领域的技术人员来说可能很明显的是,在作为发电机运行时,集成式启动发电机(322)从内燃机(22)的曲柄轴(58)接收动力,并生成电能。另一方面,在作为启动器工作时,集成式启动发电机(322)向曲柄轴(58)提供旋转运动,以促进内燃机(22)的燃烧室(64)内的燃烧。
内燃机(22)还包括具有多个齿(326)的脉冲轮(未示出)(下文中替代地称为PIP(326))。在所示的示例中,具有多个齿的脉冲轮(326)设置在ISG(322)上。在另一示例中,具有多个齿(326)的脉冲轮设置在曲柄轴(58)上,而不限制本发明的范围。在一示例中,集成式启动发电机(322)的多个齿(326)实施为在集成式启动发电机(322)的外周表面上以等距的方式设置的预定数量的金属突起。多个齿(326)沿着脉动轮的周缘成角度地等距间隔开。脉冲轮在多个齿(326)之间的角度分离较大的区域中包括缺失的齿。在替代实施例中,缺失的齿实施为基准齿。缺失的齿表示曲柄轴(58)上的预定位置,多个齿(326)中的从缺失的齿开始定位的每个齿表示曲柄轴(58)的各种预定角度位置。在一示例中,集成式启动发电机(322)的外周表面上的预先限定的金属突起的数量为“18-1”个。因此,在这样的实施例中,存在17个齿,后面是间隙、即缺失的齿。在另一示例中,集成式启动发电机(322)的外周表面上的预先限定的金属突起的数量为“22-1个”。因此,在这样的实施例中,存在21个齿,后面是间隙、即缺失的齿。内燃机(22)还包括用于测量曲柄轴(58)的位置的传感器(328)。在一实施例中,用于测量曲柄轴(58)的位置的传感器(328)可以是曲柄角度传感器。
在一实施例中,用于测量曲柄轴(58)的位置的传感器(328)定位在集成式启动发电机(322)的外周表面上。传感器(328)定位在集成式启动发电机(322)的外周表面上,使得传感器(328)在每次有pip从其附近经过时都能感应到并相应地生成脉冲。类似地,每次间隙从传感器(328)附近经过时不生成脉冲。因此,在集成式启动发电机(322)的外周表面上的预定的金属突起的数量为“18-1”个的实施例中,在集成启动器(322)的运动期间,集成式启动发电机(322)每完全旋转一次,传感器(328)就生成17次脉冲,然后是间隙。在本文中,可注意到,传感器(328)构造成生成脉冲,与集成式启动发电机(322)的旋转方向无关,无论是沿第一旋转方向(Dl)还是沿第二旋转方向(D2)。在所示的示例中,第一旋转方向(D1)是反方向,第二旋转方向(D2)是正方向。在所示的示例中,根据要求和发动机的构造,正方向和反方向可以是顺时针或逆时针方向。
传感器(328)电联接于ECU(310)。由于传感器(328)与ECU(310)的这种连接,脉冲的测量结果和缺乏脉冲的情况被传送到ECU(310)。在一实施例中,用于测量发动机(22)的曲柄轴(58)的位置的传感器(328)可以是脉冲线圈。替代地,用于测量发动机(22)的曲柄轴(58)的位置的传感器(328)可以是HAL效应传感器,也称为HAL传感器。
如图3所示,控制系统(300)包括MAP传感器(308)、曲柄角度传感器(328)、以及与MAP传感器(308)和曲柄角度传感器(328)中的每一个进行通信的ECU(310)。因此,还称为控制模块(310)的ECU(310)构造成接收如由MAP传感器(308)所测量的与进气部分(302)处的压力有关的输入。同样地,控制模块(310)构造成接收如由曲柄角度传感器(328)所测量的与曲柄轴(58)的角度位置有关的输入。MAP传感器(308)响应于感应到的进气歧管(302)内的压力生成电压信号,并且曲柄角度传感器(58)生成指示曲柄轴角度位置的表面点火感测(PIP)信号。由MAP传感器(308)生成的电压信号和PIP信号被传送到电子控制单元(310)。
现在参照图4和图5,这些图表示出了来自MAP传感器(308)的输出值以及来自曲柄角度传感器(328)的输出值。MAP传感器(308)的输出与进气歧管(302)的绝对压力直接成比例。因此,MAP传感器(308)的输出表示了进气歧管(302)的绝对压力。如图4和图5所示,MAP传感器输出线(330)表示MAP传感器电压。当车辆(10)起动并运行时,进气歧管(302)处的压力发生变化,并且相应地如MAP传感器输出线(330)所指示的,MAP传感器(308)的输出也发生变化。
控制模块(310)与MAP传感器(308)交互,以接收其输出,以确定进气歧管(302)处的电压以及由此产生的压力何时高于预定阈值。在另一实施例中,控制模块(310)适于确定进气歧管的压力何时低于预定阈值。在又一实施例中,控制模块(310)适于确定进气歧管的压力何时落在预定阈值范围内。在一示例中,控制模块(310)适于确定对应于进气歧管(302)的压力的电压高于2.77伏。
曲柄角度传感器(328)的输出呈脉冲形式,并由曲柄角度传感器脉冲线(332)表示,如图4和图5所示。当车辆(10)起动并运行时,曲柄轴(58)的位置发生变化,并且曲柄角传感器(328)感应到每一次pip从其附近经过,并相应地生成脉冲。类似地,每次间隙从传感器(328)附近经过时不生成脉冲。控制模块(310)还与曲柄角度传感器(328)交互,以接收其输出。基于曲柄角度传感器(328)和MAP传感器(308)的输出,控制模块(310)确定曲柄轴(58)的旋转方向。更具体地,曲柄轴(58)的旋转方向是由电子控制单元(310)基于MAP传感器(308)基于在与指示曲柄角度传感器(328)的角度位置的PIP信号有关的任何预定时间生成的电压信号确定的。如果MAP传感器(308)在PIP信号的预定时间生成的电压高于存储在电子控制单元(310)内的预定阈值,则控制模块(310)确定曲柄轴(58)沿第一旋转方向(D1)旋转。如果MAP传感器(308)在PIP信号的预定时间生成的电压低于存储在电子控制单元(310)内的预定阈值,则控制模块(310)确定曲柄轴(58)沿第二旋转方向(D2)旋转。PIP信号的预定时间是从曲柄轴(58)的预定角度位置中的任何一个中选择的,其中,曲柄轴(58)的角度位置由多个齿(326)表示。
在一实施例中,基于曲柄角度传感器(328)和MAP传感器(308)的输出,控制模块(310)确定曲柄轴(58)的反向旋转。还与喷射系统交互的控制模块(310)适于在曲柄轴(58)反向旋转期间限制点火系统(319)对火花塞(318)的点火。
在一实施例中,当MAP传感器(308)的输出高于预定阈值时,控制模块(310)确定曲柄轴(58)的旋转方向是正方向,并且感应到曲柄角度传感器(328)的输出脉冲中的间隙。例如,当控制模块(310)感应到MAP传感器(308)的输出高于约2.77伏,并且曲柄角度传感器(328)感应到间隙后的第一个脉冲时,控制模块(310)确定曲柄轴(58)正在进行反向旋转。在其它示例中,控制模块(310)进行如下确定:如果ADC值@第一Pip<参考电压(例如2.5V),则发动机(22)在正向运动中旋转,如果ADC值@第一Pip>参考电压,则发动机(22)在反向运动中旋转。
参照图6,描绘了由控制系统(300)控制内燃机的方法(400)。在步骤402中,MAP传感器(308)感应进气歧管(322)内的空气压力。在步骤404中,MAP传感器(308)生成代表所感应的空气压力的MAP电压信号(330)。在步骤406中,曲柄角度传感器(328)感应曲柄轴(58)的角度位置。在步骤408中,曲柄角度传感器(328)生成代表曲柄轴(58)的角度位置的表面点火感测信号(332)。在步骤410中,ECU(310)基于在预定时间生成的MAP电压信号(330)和表面点火感测信号(322)确定曲柄轴(58)的旋转方向。
电子控制单元(310)基于所确定的曲柄轴(58)的旋转来控制火花塞(318)的火花。如果由MAP传感器(308)在PIP信号(332)的预定时刻生成的电压高于存储在电子控制单元(310)内的预定阈值,则曲柄轴沿第一旋转方向(D1)旋转,其中,当确定曲柄轴的第一旋转方向(D1)旋转时,电子控制单元(310)限制火花塞(318)的火花。如果MAP传感器(308)在PIP信号(332)的预定时刻生成的电压低于存储在电子控制单元(310)内的预定阈值,则曲柄轴(58)沿第二旋转方向(D2)旋转。当确定曲柄轴(58)的第二旋转方向(D2)旋转时,电子控制单元(310)允许火花塞(318)的火花。
在使用具有控制系统(300)的车辆(10)期间,当配准发动机(22)的点火请求时,例如当骑乘者转动点火钥匙时,控制系统(300)开始从MAP传感器(308)接收进气歧管(302)的压力值。在这段时间内,ISG控制器(324)导致ISG使曲柄轴(58)旋转。例如,当活塞(62)处于BDC(下死点)位置时,ISG使曲柄轴(58)旋转,以使活塞从BDC位置运动至TDC(上死点)位置。在另一示例中,当活塞(62)处于TDC以外的任何位置时,ISG使曲柄轴(58)旋转,以使活塞从BDC位置运动至TDC(上死点)位置。
在曲柄轴(58)的这种运动期间,曲柄轴位置传感器(328)测量例如随着pip从脉冲传感器附近通过而生成的脉冲。控制系统(300)的控制模块(310)接收来自MAP传感器(308)和曲柄角度传感器(328)的输出,并且当在第一pip处的来自MAP传感器(308)的值小于阈值电压时确定发动机(22)在正向运动中旋转。同样,当在第一pip处的来自MAP传感器(308)的值大于阈值电压时,控制模块(310)确定发动机(22)在反向运动中旋转。此外,当控制模块(310)确定发动机在反向运动中旋转时,控制模块(310)限制点火系统(319)对发动机(22)的点火。否则,当控制模块(310)确定发动机在正向运动中旋转时,控制模块(310)允许点火系统(319)对火花塞(318)的点火。
鉴于上述情况,本发明提供了一个系统,当发动机(22)在反向运动中旋转时,可以防止点火系统(319)的点火。通过防止点火系统(319)的点火,当发动机(22)在反向运动中旋转时,本发明减少了燃料的浪费,同时也确保了对发动机(22)的各个部件没有不期望的损害。此外,本发明提供了一个仅基于进气歧管(302)的压力以及曲柄轴()的位置来确定发动机(22)的旋转方向的系统。因此,本发明在其实施例中协助确定发动机(22)的旋转方向,当ISG控制器(324)用于最初使曲柄轴旋转时,ISG控制器与控制发动机(22)的点火的ECU(310)脱钩。
尽管上面描述了本发明的少数实施例,但是应当理解,本发明不限于上述实施例,并且可以在本发明的精神和范围内对其进行适当的修改。
虽然本文已经相当强调本发明的特定特征,但是应当理解,在不偏离本发明的原理的情况下,可以进行各种修改,并且在较佳实施例中进行许多修改。根据本文的公开,具有本发明或较佳实施例的性质的这些和其它修改对本领域技术人员将是显而易见的,由此应清楚地理解的是,上述说明性事项仅被解释为对本发明的说明而不是限制。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。