1.以下描述大体上涉及起重机的伸缩吊臂,例如,销接吊臂。
背景技术:
2.一种具有伸缩吊臂的起重机包括机械锁定头,该机械锁定头具有联接销和锁定臂,该锁定臂构造成用于选择性地与吊臂的伸缩节的部分接合和脱离接合。机械锁定头安装在线性吊臂致动器上,该致动器构造成使吊臂的各个伸缩节延伸和缩回。为此,联接销构造成接合伸缩节,以驱动伸缩节随着线性吊臂致动器的移动而延伸或缩回。相反,联接销可脱离接合伸缩节,以允许线性吊臂致动器和机械锁定头相对于吊臂节移动。因此,机械锁定头可被重新定位以接合不同的伸缩节。
3.锁定臂构造成接合吊臂的伸缩节上的节锁。锁定臂能够操作以在锁定位置和解锁位置之间移动节锁,在锁定位置,伸缩节相对于邻近吊臂节的伸缩移动被限制,在解锁位置,伸缩节相对于邻近吊臂节的伸缩移动被允许。因此,在联接销接合在伸缩节中并且节锁处于解锁位置的情况下,线性吊臂致动器可驱动伸缩节的移动以使吊臂延伸或缩回。在到达期望位置时,锁定臂可移动到锁定位置以锁定节锁,并且基本上防止伸缩节相对于邻近吊臂节的伸缩移动。然后,联接销可从伸缩节脱离接合,以允许机械锁定头的重新定位。
4.已知的线性吊臂致动器形成为伸缩杆-缸组件,具有固定杆和可移动缸。机械锁定头设置在缸上。联接销和锁定臂通过杆内的液压伸缩式缸(trombone cylinder)液压驱动。然而,液压伸缩式缸的操作可能会受到夹带空气和/或低温的不利影响。此外,伸缩式缸内的压力可使杆或缸偏转,并且导致联接销或锁定臂被卡住。在纠正这一问题时,吊臂操作可推迟。
5.美国专利申请公开no. 2015/0128735公开了一种伸缩系统的锁定系统的滑动连接构件的驱动器,该伸缩系统具有外伸缩节和内伸缩节,每个伸缩节都设置有锁定孔,锁定螺栓可经由滑动连接构件插入和撤出该锁定孔。锁定螺栓能够通过在滑动路径中延伸的接合构件移动,使得锁定螺栓实现线性移动,并且吊臂节可通过将锁定螺栓插入螺栓孔而彼此连接,并且滑动连接构件可由线性电驱动器驱动。
6.然而,即使利用上述线性电驱动器,仍会出现联接销和/或锁定臂可能被卡住的情况。在这种情况下,线性电驱动器的移动也受到限制。连接到电线性驱动器的控制系统可继续驱动器的尝试操作。然而,当驱动器的移动被阻止时,这种尝试可能损坏或导致线性电驱动器的过早或过度磨损。
7.因此,期望提供一种用于伸缩吊臂的锁定头组件,该组件结合有运动减缓器,以在锁定头的缸销和/或节臂的移动受到阻碍时吸收致动器的移动。
技术实现要素:
8.根据一个方面,一种用于伸缩吊臂的锁定头组件包括锁定头,该锁定头具有:基
部;操作板,其能够操作地联接到基部;一个或多个缸销和/或一个或多个节锁定臂,其能够操作地联接到操作板并且能够响应于操作板相对于基部的移动而移动。锁定头组件还包括致动器,该致动器能够操作地联接到操作板并且构造成相对于基部移动操作板。致动器包括马达和驱动臂。马达构造成在臂第一位置和臂第二位置之间移动驱动臂。锁定头组件还包括能够操作地连接到致动器和锁定头的运动减缓器。该运动减缓器包括壳体、至少部分地设置在壳体内的杆、以及设置在杆和壳体之间的偏压装置。
9.响应于操作板相对于基部的移动,一个或多个缸销可在缩回的销位置和延伸的销位置之间移动。响应于操作板相对于基部的移动,一个或多个节锁定臂可在锁定位置和解锁位置之间移动。
10.在实施例中,运动减缓器可连接到操作板和驱动臂并连接在它们之间。当操作板响应于驱动臂的移动而移动时,运动减缓器可处于刚性状态。当操作板在第一方向上的移动响应于驱动臂在第一方向上的移动而被阻止时,运动减缓器可处于第一加载状态。当运动减缓器处于第一加载状态时,杆可处于相对于壳体的缩回位置,并且偏压装置可在第一方向上推压操作板。当操作板在第二方向上的移动响应于驱动臂在第二方向上的移动而被阻止时,运动减缓器可处于第二加载状态。当运动减缓器处于第二加载状态时,杆可处于相对于壳体的延伸位置,并且偏压装置可在第二方向上推压操作板。
11.在实施例中,锁定头组件还可包括连接到致动器的辅助驱动装置。辅助驱动装置可为具有辅助马达和辅助驱动臂的辅助致动器。致动器可安装在轨道上,并且构造成用于响应于辅助驱动臂的移动而相对于轨道平移移动。
12.根据另一方面,一种用于起重机的伸缩吊臂包括:基部节;多个伸缩节,其能够相对于基部节移动以调节吊臂的长度;以及吊臂致动器,其设置在基部节内并且能够操作以移动多个伸缩节中的伸缩节,从而调节吊臂的长度。伸缩吊臂还包括连接到吊臂致动器的锁定头组件。锁定头组件包括锁定头,该锁定头具有:基部;操作板,其能够操作地联接到基部;一个或多个缸销和/或一个或多个节锁定臂,其能够操作地联接到操作板并且能够响应于操作板相对于基部的移动而移动。锁定头组件还包括致动器,该致动器能够操作地联接到操作板并且构造成相对于基部移动操作板。致动器包括马达和驱动臂。马达构造成在臂第一位置和臂第二位置之间驱动驱动臂。运动减缓器能够操作地联接到致动器和锁定头,并且包括壳体、至少部分地设置在壳体内的杆、以及设置在杆和壳体之间的偏压装置。
13.根据另一方面,一种起重机包括载体和安装在载体上的上部结构。上部结构包括伸缩吊臂,该伸缩吊臂具有:基部节;多个伸缩节,其能够相对于基部节移动以调节吊臂的长度;以及吊臂致动器,其设置在基部节内并且能够操作以移动多个伸缩节中的伸缩节,从而调节吊臂的长度。该起重机还包括连接到吊臂致动器的锁定头。锁定头包括:基部;操作板,其能够操作地联接到基部;一个或多个缸销和/或一个或多个节锁定臂,其能够操作地连接到操作板并且能够响应于操作板相对于基部的移动而移动。致动器能够操作地安装在吊臂致动器上、联接到操作板并且构造成相对于基部移动操作板。致动器包括马达和驱动臂。马达构造成在臂第一位置和臂第二位置之间驱动驱动臂。运动减缓器能够操作地联接到锁定头和致动器,并且包括壳体、至少部分地设置在壳体内的杆、以及设置在杆和壳体之间的偏压装置。
14.根据另一方面,一种用于控制伸缩吊臂的吊臂致动器的方法包括:利用一个或多
个位置传感器检测操作板的位置;由控制器将操作板的检测到的位置与操作板的预期位置进行比较;以及由控制器确定操作板的检测到的位置是否与操作板的预期位置相同。如果操作板的检测到的位置与操作板的预期位置不相同,则该方法还包括控制液压杆-缸组件以进行校正操作,直到操作板被检测到在预期位置处为止。操作板在来自能够操作地联接到操作板的运动减缓器的偏压力下移动到预期位置。
15.从结合所附权利要求书的以下详细描述中,本发明的这些和其它特征和优点将显而易见。
附图说明
16.图1是根据实施例的起重机的透视图;图2是根据实施例的吊臂致动器的俯视图;图3是图2的吊臂致动器的侧视图;图4是图2的吊臂致动器的透视图;图5是图2的吊臂致动器的端视图;图6a是根据实施例的锁定头组件的透视图;图6b是图6a的细部(detail)a的放大视图;图7是根据实施例的处于刚性状态的运动减缓器的透视图;图8是图7的运动减缓器的另一个透视图;图9是根据实施例的处于第一加载状态的图7的运动减缓器的透视图;图10是图9的运动减缓器的另一个透视图;图11是根据实施例的处于第二加载状态的图7的运动减缓器的透视图;图12是图11的运动减缓器的另一个透视图;图13是根据实施例的锁定头组件的透视图;图14是示出图13的锁定头组件的一部分的放大视图;图15至图18是根据实施例的运动减缓器的各种视图;图19a至图19g是示出根据实施例的锁定头组件的状态和位置的图示;图20是根据实施例的辅助驱动装置的透视图;图21是根据实施例的构造成用于辅助驱动装置一起使用的致动器的透视图;图22是根据实施例的与图21的致动器一起的辅助驱动装置的透视图;图23是图示根据实施例的控制系统的示例的示意性框图图示;图24是图示根据实施例的位置传感器的示例的放大透视图;图25是图示根据实施例的位置传感器的另一示例的放大透视图;和图26是图示根据实施例的用于控制吊臂致动器的方法的示例的框图图示。
具体实施方式
17.虽然本装置容许有各种形式的实施例,但是在附图中示出并且将在下文中描述当前优选的实施例,其中应当理解,本公开应被认为是该装置的范例,并且并不旨在限于所图示的具体实施例。
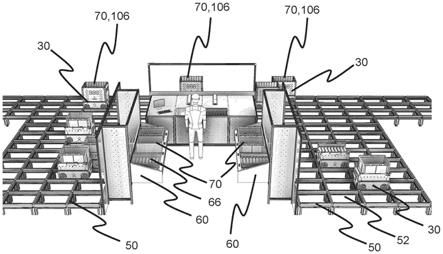
18.参考图1,起重机110包括载体112和安装在载体112上的上部结构114。在一个实施
例中,上部结构114能够旋转地安装在载体112上。上部结构114包括例如操作者驾驶室116和伸缩吊臂118。伸缩吊臂118包括基部节120和一个或多个伸缩节122,伸缩节122构造成用于移动进入和离开基部节120,以分别使吊臂118缩回和延伸。
19.伸缩吊臂118包括设置在基部节120中的吊臂致动器124,用于移动一个或多个伸缩节122。在一个实施例中,吊臂致动器124是诸如液压杆-缸组件的线性致动器,其中杆126固定在基部节120内,并且缸128相对于杆126在缩回位置和延伸位置之间移动。
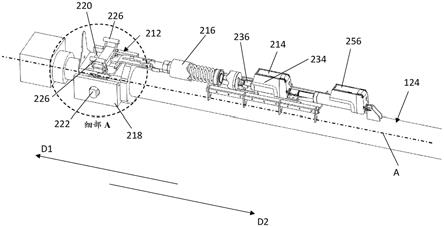
20.参考图2至图5,吊臂致动器124包括具有锁定头212、致动器214和运动减缓器216的锁定头组件210。锁定头组件210构造成选择性地将吊臂致动器124联接到伸缩节122和从伸缩节122脱离。锁定头组件210还可构造成操作设置在伸缩节122上的节锁(未示出),以将伸缩节锁定到下一个向外邻近的吊臂节120、122和从该吊臂节120、122解锁。锁定头组件210可连接到缸128或安装在缸128上。
21.参考图6a和图6b以及图19a至图19g的图示,在一个实施例中,锁定头212包括基部218和能够操作地连接到基部218的操作板220。操作板220能够相对于基部218大体上沿着或平行于吊臂致动器124和/或吊臂118的纵向轴线a移动。锁定头212还包括一个或多个缸销222,缸销222通过相应的销连杆224能够操作地连接到操作板220。销连杆224可为连接到缸销222并延伸以接合到操作板220的凸耳或类似结构。此外,锁定头212可包括一个或多个节锁定臂226,该节锁定臂226通过相应的臂连杆228能够操作地连接到操作板220。臂连杆228可为连接到节锁定臂226并延伸以接合到操作板220的凸耳或类似结构。
22.操作板220包括一个或多个第一导向壁230。第一导向壁230包括基本上在操作板220的移动方向上(即,在平行于纵向轴线a的方向上)延伸的第一节,以及相对于第一节成角度并且在具有纵向分量和横向分量的方向上延伸的第二节。
23.第一导向壁230构造成接合销连杆224。在销连杆224接合在第一导向壁230的第一节处的情况下,操作板220相对于销连杆224的移动不导致缸销222移动。然而,在销连杆224接合在第一导向壁230的第二节处的情况下,操作板220相对于销连杆224的移动导致缸销222相对于基部218在延伸的销位置(例如,参见图19a)和缩回的销位置(例如,参见图19b)之间的横向移动。
24.操作板220还可包括一个或多个第二导向壁232。第二导向壁232包括基本上在操作板220的移动方向上(即,在平行于纵向轴线a的方向上)延伸的第一节,以及相对于第一节成角度并且在具有纵向分量和横向分量的方向上延伸的第二节。
25.第二导向壁232构造成接合臂连杆228。在臂连杆228接合在第二导向壁232的第一节的情况下,操作板220相对于臂连杆228的移动不导致节锁定臂226移动。然而,在臂连杆228接合在第二导向壁232的第二节的情况下,操作板220相对于臂连杆228的移动导致节锁定臂226在锁定位置(例如,参见图19a)和解锁位置(例如,参见图19c)之间移动。在一个实施例中,节锁定臂226在锁定位置和解锁位置之间枢转或旋转。
26.第一导向壁230和第二导向壁232可相对于彼此定位,使得当缸销222被驱动以在延伸位置和缩回位置之间移动时,节锁定臂226保持在锁定位置。类似地,第一导向壁230和第二导向壁232可定位成使得当节锁定臂226在锁定位置和解锁位置之间移动时缸销222保持在延伸位置。
27.在一个实施例中,销连杆224和臂连杆228可同时定位在第一导向壁230和第二导
向壁232的相应第一节的部分处(例如,参见图19a)。因此,缸销222可处于销延伸位置,而节锁定臂226在锁定位置。
28.第一导向壁230和/或第二导向壁232各自可由操作板220中的狭槽或凹部形成,或者可从操作板220的表面突出。
29.操作板220可由安装到吊臂致动器124的致动器214驱动以移动。致动器214可包括马达234和驱动臂236。在一个实施例中,致动器214是电动致动器,并且马达234是电动马达。驱动臂236由马达234驱动以延伸和/或缩回。在一个实施例中,弹簧或类似偏压装置可推压驱动臂236在一个方向上移动。
30.在一个实施例中,驱动臂236大体上在纵向轴线a的方向上移动,并且构造成驱动操作板220的相应移动。也就是说,驱动臂236在第一方向d1上相对于马达234延伸的移动可导致操作板220在第一方向d1上的移动。类似地,驱动臂236在第二方向d2上相对于马达234缩回的移动可导致操作板在第二方向d2上的移动。
31.运动减缓器216能够操作地连接到致动器214和锁定头212。在一个实施例中,运动减缓器216设置在致动器214和锁定头212之间,并且可在一个端部处连接到驱动臂236并且在另一个端部处连接到操作板220。在其它实施例中,致动器214可设置在运动减缓器216和锁定头212之间。
32.参考图7至图12和图19a至图19g,在一个实施例中,运动减缓器216包括壳体238、至少部分地设置在壳体238内的杆240以及设置在杆240和壳体238之间的诸如弹簧242的至少一个偏压装置。第一弹簧座244可在弹簧242的第一端部处设置在杆240上。第二弹簧座246可在弹簧242的第二端部处设置在杆240上。在一个实施例中,杆240延伸穿过第一弹簧座244和第二弹簧座246两者。杆240能够相对于第一弹簧座244和第二弹簧座246移动,且反之亦然。
33.壳体238包括第一止动件248,第一止动件248构造成限制第一弹簧座244相对于壳体238在第一方向d1上的运动。壳体238还包括第二止动件250,第二止动件250构造成限制第二弹簧座246相对于壳体238在第二方向d2上的运动。第一止动件248还可使第一弹簧座244与壳体238相对于杆240在第二方向d2上移动。第二止动件250还可使第二弹簧座246与壳体238相对于杆240在第一方向d1上移动。
34.杆240可包括第一杆止动件252,该第一杆止动件252构造成限制第一弹簧座244相对于杆240在第一方向d1上的移动。杆240还可包括第二杆止动件254,该第二杆止动件254构造成限制第二弹簧座246相对于杆240在第二方向d2上的移动。
35.在锁定头组件210的第一操作状态下,缸销222和节锁定臂226可响应于操作板220相对于基部218的移动而自由移动,并且运动减缓器216处于刚性状态(例如,参见图7、图8和图19a至图19c)。因此,驱动臂236的移动导致操作板220的相应移动。在刚性状态下,杆240和壳体238在驱动臂236的移动期间相对于彼此保持基本上固定。在一个实施例中,杆240相对于壳体238处于中立位置,运动减缓器216处于刚性状态,使得运动减缓器216具有第一长度。此外,在刚性状态下,由驱动臂236生成的力通过运动减缓器216传递到操作板220,并且不导致弹簧242的显著变形或壳体238和杆240的相对移动。
36.在一个实施例中,驱动臂236处于驱动臂中立位置(参见图19a,在“n
da”处指示)并且可在第一方向d1上从驱动中立位置n
da
移动到驱动臂第一位置(参见图19c,在“da1”处指
示)。在第一操作状态下,驱动臂236的这种移动导致操作板220在第一方向d1上从板中立位置(参见图19a,在“n
op”处指示)到板第一位置(参见图19a,在“op1”处指示)的相应移动。在一个实施例中,当操作板220处于板中立位置n
op
时,缸销222处于延伸销位置,并且节锁定臂226处于锁定位置。操作板220向图19c中所示的板第一位置op1的移动导致节锁定臂226移动到解锁位置,以解锁在伸缩节和邻近吊臂节之间的节锁,同时缸销222保持在与伸缩节接合的延伸位置。
37.相反,驱动臂236在第二方向d2上从驱动臂第一位置da1(图19c)到驱动臂中立位置n
da
(图19a)的移动导致操作板220在第二方向d2上从板第一位置op1(图19c)到板中立位置n
op
(图19a)的移动。操作板220从板第一位置op1到板中立位置n
op
的移动导致节锁定臂226从解锁位置(图19c)移动到锁定位置(图19a),以在缸销222保持在延伸位置的同时锁定节锁。
38.仍然在第一操作状态下,驱动臂236在第二方向d2上从驱动臂中立位置n
da
(图19a)到驱动臂第二位置da2(图19b)的移动导致操作板220在第二方向d2上从板中立位置n
op
(图19a)到板第二位置op2(图19b)的相应移动。操作板220从板中立位置n
op
到板第二位置op2的移动导致缸销222从延伸销位置(图19a)移动到缩回销位置(图19b),以与伸缩节脱离接合,同时节锁定臂226保持在锁定位置。
39.相反,驱动臂236在第一方向d1上从驱动臂第二位置da2(图19b)到驱动臂中立位置n
da
(图19a)的移动导致操作板220在第一方向d1上从板第二位置op2(图19b)到板中立位置n
op
(图19a)的相应移动。操作板220从板第二位置op2到板中立位置n
op
的移动导致缸销222从缩回销位置(图19b)移动到延伸销位置(图19a),同时节锁定臂226保持在锁定位置。
40.在锁定头组件210的其它操作状态下,当缸销222或节锁定臂226的移动被阻止时,操作板220的移动可被阻止。例如,如果缸销222从延伸销位置到缩回销位置的移动被阻止,则当驱动臂236被操作时操作板220从板中立位置n
op
(图19a)到板第二位置op2(图19b)的移动也被阻止。在另一示例中,缸销222从缩回销位置到延伸销位置的移动可被阻止,这随后在驱动臂236被操作时阻止操作板220从板第二位置op2(图19b)到板中立位置n
op
(图19a)的移动。
41.在其它示例中,节锁定臂226从锁定位置到解锁位置的移动可被阻止,这在驱动臂236被操作时阻止操作板220从板中立位置n
op
到板第一位置op1的移动。在又一示例中,节锁定臂226从解锁位置到锁定位置的移动可被阻止,这在驱动臂236被操作时阻止操作板220从板第一位置op1到板中立位置n
op
的移动。
42.运动减缓器216构造成当驱动臂236被操作以移动而操作板220的移动被阻止时从刚性状态移动到一个或多个加载状态。也就是说,当操作板220的移动被阻止时,从驱动臂236施加的力克服弹簧242的弹簧力,使得壳体238和杆240的相对定位被改变。例如,当杆240相对于壳体238处于缩回位置并且弹簧242被压缩以施加用于在第一方向d1上推压操作板220的偏压力时,运动减缓器216被移动到第一加载状态(图9、图10、图19f和图19g)。运动减缓器216在第一加载状态下具有小于第一长度的第二长度。因此,在第一加载状态下,运动减缓器216可推压操作板220在第一方向d1上从板中立位置n
op
移动到板第一位置op1,或从板第二位置op2移动到板中立位置n
op
。
43.运动减缓器216构造成当杆240相对于壳体238处于延伸位置并且弹簧242被压缩
以施加在第二方向d2上推压操作板220的偏压力时从刚性状态移动到第二加载状态(图11、图12、图19d和图19e)。运动减缓器216在第二加载状态下具有大于第一长度的第三长度。因此,在第二加载状态下,运动减缓器216可推压操作板220在第二方向d2上从板第一位置op1移动到板中立位置n
op
或从板块中立位置n
op
移动到板第二位置op2。
44.在上述实施例中,当缸销222从缩回销位置到延伸销位置的移动被阻止时(图19g),或者当节锁定臂从锁定位置到解锁位置的移动被阻止时(图19f),响应于驱动臂236的相应移动,运动减缓器216可从刚性状态移动到第一加载状态。也就是说,当响应于驱动臂236在第一方向d1上的移动而保持操作板220不移动时,运动减缓器216可被移动到第一加载状态。
45.例如,驱动臂236可被操作以在第一方向d1上从驱动臂中立位置n
da
移动到驱动臂第一位置da1(图19f中所示的)。然而,在节锁定臂226向解锁位置的移动被阻止的情况下,操作板220保持在板中立位置n
op
(也在图19f中所示的)。类似地,驱动臂236可被操作以在第一方向d1上从驱动臂第二位置da2移动到如图19g中所示的驱动臂中立位置n
da
。然而,在缸销222向延伸销位置的移动被阻止的情况下,操作板220保持在板第二位置op2(也在图19g中所示的)。
46.因此,在一个实施例中,杆240由操作板220保持以防止在第一方向d1上移动,并且驱动臂236导致壳体238相对于杆240在第一方向d1上移动。壳体238的第二止动件250沿着杆240驱动第二弹簧座246,同时第一杆止动件252保持第一弹簧座244以防止在第一方向d1上移动,并且弹簧242被压缩。
47.压缩弹簧242在第一方向d1上向操作板220施加偏压力。因此,当缸销222变得自由以延伸时,来自处于第一加载状态的运动减缓器216的弹簧力导致操作板220从板第二位置op2移动到板中立位置n
op
,以在不进一步操作致动器214(或进一步移动驱动臂236)的情况下延伸缸销222。
48.类似地,当节锁定臂226变得自由以移动到解锁位置时,来自处于第一加载状态的运动减缓器216的弹簧力导致操作板220从板中立位置n
op
移动到板第一位置op1,以在不进一步操作致动器214(或进一步移动驱动臂236)的情况下将节锁定臂226移动到解锁位置。
49.通过将压缩弹簧242的弹簧力在第一方向d1上施加到第一弹簧座244,并进而施加到第一杆止动件252,运动减缓器216导致操作板220在第一方向d1上移动。弹簧力导致杆240相对于壳体238移动到其中立位置,并且在第一方向d1上驱动操作板220。因此,运动减缓器216可返回到其刚性状态。
50.例如,当缸销222变得自由以延伸时,运动减缓器216可从图19g中所示的其第一加载状态移动到图19a中所示的其刚性状态,并且操作板220可从图19g中所示的板第二位置op2移动到图19a中所示的板中立位置n
op
。在另一示例中,当节锁定臂226变得自由以移动到解锁位置时,运动减缓器216可从图19f中所示的其第一加载状态移动到图19c中所示的其刚性状态,并且操作板220可从图19f中所示的板中立位置n
op
移动到图19c中所示的板第一位置op1。
51.在上述实施例中,当缸销222从延伸销位置到缩回销位置的移动被阻止时(图19d),或者当节锁定臂226从解锁位置到锁定位置的移动被阻止时(图19e),运动减缓器216可从刚性状态移动到第二加载状态。
52.例如,驱动臂236可被操作以在第二方向d2上从驱动臂第一位置da1移动到如图19e中所示的驱动臂中立位置n
da
。然而,在节锁定臂226向锁定位置的移动被阻止的情况下,操作板220保持在板第一位置op1。类似地,驱动臂236可被操作以在第二方向d2上从驱动臂中立位置n
da
移动到如图19d中所示的驱动臂第二位置da2。然而,在缸销222向缩回位置的移动被阻止的情况下,操作板220保持在板的中立位置n
op
。
53.因此,杆240由操作板220保持以防止在第二方向d2上移动,并且驱动臂236导致壳体238相对于杆240在第二方向d2上移动。壳体238的第一止动件248沿着杆240在第二方向d2上驱动第一弹簧座244,同时第二杆止动件254保持第二弹簧座246以防止在第二方向d2上移动,并且弹簧242被压缩。
54.压缩弹簧242在第二方向d2上向操作板220施加偏压力。因此,当缸销222变得自由以缩回时,来自处于第二加载状态的运动减缓器216的弹簧力导致操作板220从板中立位置n
op
移动到板第二位置op2,以在不进一步操作致动器214(或进一步移动驱动臂236)的情况下使缸销222缩回。
55.类似地,当节锁定臂226变得自由以移动到锁定位置时,来自处于第二加载状态的运动减缓器216的弹簧力导致操作板220从板第一位置op1移动到板中立位置n
op
,以在不进一步操作致动器(或进一步移动驱动臂236)的情况下将节锁定臂226移动到锁定位置。
56.通过将压缩弹簧242的弹簧力在第二方向d2上施加到第二弹簧座246,并进而施加到第二杆止动件254,运动减缓器216导致操作板220在第二方向d2上移动。弹簧力导致杆240相对于壳体238缩回到其中立位置,并且在第二方向d2上驱动操作板220。因此,运动减缓器216可返回到其刚性状态。
57.例如,当缸销222变得自由以缩回时,运动减缓器216可从图19d中所示的其第二加载状态移动到图19b中所示的其刚性状态,并且操作板220可从图19d中所示的板中立位置n
op
移动到图19b中所示的板第二位置op2。在另一示例中,当节锁定臂226变得自由以移动到锁定位置时,运动减缓器216可从图19e中所示的其第二加载状态移动到图19a中所示的其刚性状态,并且操作板220可从图19e中所示的板第一位置op1移动到图19a中所示的板中立位置n
op
。
58.参考图6a和图13,在一个实施例中,锁定头组件210还可包括连接到致动器214的辅助驱动装置,诸如辅助致动器256(图6a)。辅助致动器256可为类似于致动器214的致动器,并且包括辅助马达258和由辅助马达258驱动的辅助驱动臂260。在一个实施例中,辅助致动器256是电动致动器,并且辅助马达258是电动马达。辅助驱动臂260构造成用于在第一方向d1和第二方向d2上移动。辅助驱动臂260构造成用于在驱动臂236移动通过的距离的大约两倍长(即,驱动臂第一位置da1和驱动臂第二位置da2之间的距离的大约两倍长)的距离上移动。
59.参考图13和图14,在一个实施例中,例如,在致动器214的操作停止的情况下,辅助致动器256可代替致动器214操作。为此,致动器214可安装在缸128上以进行平移移动。例如,致动器214可安装在轨道262上以相对于缸128滑动或滚动。辅助驱动臂260可连接到致动器214,并且构造成响应于辅助致动器256的操作在轨道262上移动致动器214。
60.例如,可确定具有驱动臂236的致动器214处于中立位置。然后,通过使用辅助致动器256来驱动操作板220的移动,可进行期望的缸销222和节锁定臂226的移动。
61.在另一示例中,在驱动臂236处于驱动臂第一位置da1或驱动臂第二位置da2并且操作板220处于相应的板第一位置op1或板第二位置op2的情况下,致动器214的操作可停止。辅助致动器256可在辅助驱动臂260最初处于中立位置的情况下被操作,以在板第一位置op1和板中立位置n
op
之间和/或在板中立位置n
op
和板第二位置op2之间移动操作板220。然而,辅助驱动臂260从其中立位置到其第一位置的延伸距离是驱动臂236从驱动中立位置到驱动臂第一位置da1的延伸距离的两倍长,以考虑其中当辅助致动器256开始操作时驱动臂236和操作板220可能处于其缩回第二位置的情况。
62.参考图15至图18,在一个实施例中,运动减缓器216还可包括诸如第二弹簧264的第二偏压装置,其构造成在与弹簧242的弹簧力相反的方向上或者备选地在与弹簧242的弹簧力相同的方向上提供弹簧力。第二弹簧264可设置在弹簧242内。以这种方式,可提供期望的力分布。此外,可通过调节或替换弹簧242或第二弹簧264来根据需要调谐力分布。例如,运动减缓器216的净弹簧力可被调谐为大于或小于弹簧242的弹簧力。
63.参考图20,在另一个实施例中,辅助驱动装置可为螺纹驱动器356。在一个实施例中,螺纹驱动器356可为花篮螺丝(turnbuckle)或类似装置。在一个实施例中,致动器214可通过螺纹驱动器356连接到缸128。在一个实施例中,螺纹驱动器356可具有内螺纹部件或管362和外螺纹部件或杆364,该外螺纹部件或杆364构造成用于与管362配合、螺纹接合。螺纹驱动器356可能够操作地连接到缸托架360,缸托架360连接到吊臂致动器的缸128。在一个实施例中,杆364可经由止推垫圈联接到缸托架360,并且利用卡环保持在位。在一个实施例中,杆364构造成用于相对于缸托架360和管362旋转。杆364可基本上被保持以防止相对于缸托架360的线性移动。因此,杆364的旋转可通过管362和杆364之间的螺纹接合导致管362和致动器214的线性移动。在一个实施例中,杆364可通过例如与邻近缸托架360的杆364的端部接合的工具旋转。因此,螺纹驱动器356可被机械地或手动地驱动,以相对于缸128移动致动器214,从而驱动操作板220的移动。
64.参考图21至图22,在另一个实施例中,辅助驱动装置可在致动器214上的辅助驱动接口458处连接到致动器214。例如,在一个实施例中,辅助驱动装置可为连接到辅助驱动接口458的工具(未示出),其可被操作以驱动马达234的齿轮传动,从而驱动驱动臂236的移动。如图22中所示,在一个实施例中,辅助驱动装置可为可连接到辅助驱动接口458的次级马达456。然后,次级马达456可被操作以经由马达234的齿轮传动驱动驱动臂236的移动。次级马达456可能够操作地连接到控制系统310(图1)并经由控制系统310来控制。
65.再次参考图1,起重机110也可包括控制系统310。控制系统310可能够操作地连接到吊臂致动器124并且构造成控制吊臂致动器124的移动。例如,控制系统310可控制吊臂致动器124以延伸和缩回。在实施例中,控制系统310也可能够操作地连接到锁定头组件210,例如,以控制致动器214的操作。例如,控制系统310可操作致动器214以使驱动臂236延伸和/或缩回,以导致操作板220的移动。因此,控制系统310可通过利用致动器214控制操作板220的移动来控制缸销222和节锁定臂226的移动。
66.图23是图示根据实施例的控制系统310的示例的示意图示。控制系统310可控制吊臂118的移动以延伸或缩回。在实施例中,控制系统310可控制致动器214以将操作板220从板中立位置n
op
移动到板第二位置op2,从而将缸销222从延伸销位置移动到缩回销位置。控制系统310可控制吊臂致动器124以将锁定头212定位成邻近要利用联接销222联接到锁定
头212的伸缩节122的部分。控制系统310可控制致动器214以将操作板220从板第二位置op2移动到板中立位置n
op
,从而将缸销222从销缩回位置移动到销延伸位置以接合要移动的伸缩节。控制系统310可控制致动器214以将操作板220从板中立位置n
op
移动到板第一位置op1,从而将节锁定臂226从锁定位置移动到解锁位置。控制系统310可控制吊臂致动器124以延伸或缩回,从而导致伸缩节122移动以延伸或缩回。控制系统310可控制致动器214以将操作板220从板第一位置op1移动到板中立位置n
op
,从而将节锁定臂226从解锁位置移动到锁定位置。
67.在实施例中,控制系统310也可能够操作地连接到诸如辅助致动器256的辅助驱动装置。因此,控制系统310可通过控制辅助致动器256而不是致动器214来控制操作板220的移动。
68.控制系统310可包括控制器510,控制器510具有处理器512(诸如微处理器或其它合适的计算机处理装置)、存储器514和通信接口516,通信接口516例如在总线518上能够操作地彼此连接。处理器512可构造成执行程序指令并进行操作和/或响应于执行程序指令而控制控制系统310的其它部件以进行操作。
69.存储器514可为诸如非暂时性计算机可读存储介质的计算机可读存储介质,并且可构造成存储程序指令。存储器可包括一个或多个存储器装置,这些存储器装置各自包括计算机可读存储介质。
70.通信接口516可包括收发器或类似的“装置到装置(device to device)”,其构造成适应控制系统310与通信地连接到控制系统310的一个或多个其它装置之间的有线或无线通信。
71.控制系统310可包括或能够操作地连接到其它装置,诸如用户输入装置520,操作者可经由用户输入装置520向控制系统310提供指令。用户输入装置520可为例如操纵杆、杆件、按钮、旋钮、滚轮、开关、滑块、触摸屏显示器、麦克风、相机、传感器、小键盘、键盘、指点装置、方向箭头键等,包括它们的组合。
72.因此,控制器510可构造成经由用户输入装置520接收操作者指令。在实施例中,操作者指令可为吊臂延伸/缩回指令,以使吊臂118延伸或缩回。控制系统310可例如如上所述的那样响应于接收到吊臂延伸/缩回指令控制吊臂致动器124和/或致动器214的操作。
73.在实施例中,控制系统310可包括一个或多个传感器,或者能够操作地连接到一个或多个传感器。在实施例中,一个或多个传感器可包括第一传感器522、第二传感器524或两者。一个或多个传感器可包括一个或多个位置传感器。在实施例中,一个或多个传感器可构造成检测操作板220的位置。
74.在实施例中,一个或多个传感器可能够操作地连接到控制器510。一个或多个传感器可向控制器510提供信号,该信号可由控制器510处理以确定操作板220的位置。因此,可检测操作板220的位置。
75.参考图24,在实施例中,第一传感器522可包括多个接近开关522。在实施例中,多个接近开关522可包括第一接近开关、第二接近开关和第三接近开关,该第一接近开关、第二接近开关和第三接近开关定位成分别响应于操作板220移动到板第一位置op1、板中立位置n
op
和板第二位置op2而被致动。接近开关可由操作板220上的靶526致动。在一个实施例中,控制器510可存储将每个接近开关522与操作板220的相应位置相关联的位置信息。因
此,响应于从特定接近开关接收信号,控制器510可基于存储的位置信息确定操作板220的相应位置。
76.参考图25,在实施例中,第二传感器524可为线性位置传感器524。在实施例中,线性位置传感器524可包括构造成与操作板220一起移动的移动部分528。移动部分528可相对于线性位置传感器524的基部部分530被移动。在实施例中,移动部分528可为能够与操作板220一起移动的磁靶528,并且基部部分530可为细长的磁传感器部分530。线性位置传感器524可向控制器510提供指示移动部分528相对于基部部分530的位置的信号。控制器510可存储将移动部分528和基部部分530的相对位置与操作板220的位置相关联的位置信息。控制器510可基于位置信息确定操作板220的位置。
77.在第一操作状态下,经由控制器510,控制系统310还可基于操作板220的位置来确定缸销222和/或节锁定臂226的位置。例如,控制器510可存储销位置信息,该销位置信息指示对应于操作板220的确定位置的预期销位置。例如,销位置信息可指示当操作板220处于板中立位置n
op
或板第一位置op1时缸销222预期处于延伸销位置。销位置信息还可指示当操作板220处于板第二位置op2时缸销222预期处于缩回销位置。
78.类似地,经由控制器510,控制系统310可存储臂位置信息,该臂位置信息指示对应于操作板220的确定位置的预期节锁定臂位置。例如,臂位置信息可指示当操作板220处于板中立位置n
op
或板第二位置op2时节锁定臂226预期处于锁定位置。臂位置信息还可指示当操作板220处于板第一位置op1时节锁定臂226预期处于解锁位置。
79.经由控制器510,控制系统310还可构造成确定缸销222和/或节臂226的移动是否被阻止。例如,控制系统310可构造成通过用户输入装置520接收吊臂延伸/缩回指令。响应于吊臂延伸/缩回指令,控制系统310可构造成控制锁定头组件210和吊臂致动器124以根据吊臂延伸/缩回指令延伸或缩回伸缩节122。
80.例如,控制系统310经由控制器510可控制吊臂致动器124以进行预定的操作序列。在实施例中,预定操作序列可在第一操作状态下进行,并且可包括例如:控制液压杆-缸组件以将锁定头212定位成邻近要与缸销222接合的伸缩节122的一部分;控制致动器214以移动操作板220以将缸销222移动到延伸销位置以接合要移动的伸缩节122;控制致动器214以移动操作板220以将节锁定臂226移动到解锁位置;控制液压杆-缸组件以使要移动的伸缩节122延伸或缩回;控制致动器214以移动操作板220以将节锁定臂移动到锁定位置;控制致动器214以移动操作板220以将缸销移动到销缩回位置;以及控制液压杆-缸组件以相对于吊臂节移动锁定头组件210,例如,用于重新定位以移动另一伸缩节。
81.然而,在缸销222和/或节锁定臂226的移动被阻止的情况下,操作板220的移动也可被阻止。因此,如果控制系统310确定操作板220未移动或未按预期定位,则控制系统310可确定缸销222和/或节锁定臂226的移动被阻止。例如,响应于接收吊臂延伸/缩回指令,控制系统310可确定操作板220的位置,控制致动器214以移动操作板220以移动缸销222或节销226,并且在致动器214操作期间和/或之后确定操作板220的位置以移动操作板220。如果控制系统310确定操作板220的位置在致动器214的操作之后没有改变,则控制系统310可根据操作板220的预期移动确定缸销222或节锁定臂226的移动被阻止。
82.如果控制系统310确定缸销222和/或节锁定臂226的移动被阻止,则控制系统310可控制吊臂致动器124以进行一个或多个校正操作。校正操作可包括例如相对短的延伸和/
或缩回操作。校正操作可使缸销222和/或节锁定臂226相对于邻近的吊臂节122移动,并且可提供足够的间隙以允许缸销222和/或节锁定臂226的移动。
83.如上所述,在缸销222和/或节锁定臂226以及继而操作板220的移动被阻止的情况下,运动减缓器216可被移动到加载状态。当通过校正操作提供足够的间隙时,来自处于加载状态的运动减缓器216且施加到操作板220的力可导致操作板移动到其预期位置。操作板220在来自运动减缓器216的偏压力下的移动可导致缸销222和/或节锁定臂226的相应移动。
84.图26是图示根据实施例的控制吊臂致动器以操作伸缩吊臂的方法的示例的图示。方法600可包括在610检测操作板220的位置。在612,该方法可包括将操作板220的检测到的位置与操作板220的预期位置进行比较。在614,该方法可包括确定操作板220的检测到的位置是否与操作板220的预期位置相同。在616,如果操作板220的检测到的位置与操作板220的预期位置不相同,则该方法可包括利用吊臂致动器124进行校正操作,直到操作板220被检测到在预期位置处为止,其中操作板220在来自运动减缓器216的偏压力下移动到预期位置。在实施例中,该方法可与本文所述的吊臂致动器124、锁定头组件210和控制系统310一起使用。
85.在610,控制系统310可基于从诸如第一传感器522和/或第二传感器524的一个或多个传感器接收的一个或多个信号来检测操作板220的位置。在实施例中,操作板220的检测到的位置可为例如板第一位置op1、板中立位置n
op
或板第二位置op2。
86.在612,控制系统310可将操作板220的检测到的位置与操作板220的预期位置进行比较。操作板220的预期位置可例如存储在存储器514中。预期位置可为例如板第一位置op1、板中立位置n
op
或板第二位置op2。控制系统310可基于例如响应于致动器214的操作和/或缸销222和/或节锁定臂226的预期操作的操作板220的预期移动来选择与检测到的位置进行比较的预期位置。例如,在实施例中,如果预期操作是将缸销222移动到缩回销位置,则控制系统310可确定预期位置是板第二位置op2。因此,在实施例中,控制系统310可将操作板220的检测到的位置与预期位置(即,在本示例中的板第二位置op2)进行比较。可基于例如用户指令或识别预定操作序列中的预期操作来确定预期操作。
87.在614,控制系统310可基于在612进行的比较来确定操作板220的检测到的位置是否与预期位置相同。如果操作板220的检测到的位置与预期位置相同,则控制系统310可根据预定的操作序列继续操作吊臂致动器124。
88.在616,如果操作板220的检测到的位置与预期位置不相同,则控制系统310可操作吊臂致动器124以进行一个或多个校正操作。校正操作可为校正移动,诸如导致锁定头212相对于吊臂118的邻近伸缩节122移动的相对小的延伸和/或缩回。例如,控制系统310可控制液压杆-缸组件的缸128在一系列相对短的交替移动中相对于杆126延伸和/或缩回,以导致缸销222和/或节锁定臂226相对于邻近的吊臂节移动相应的相对短的距离。相对小的移动可将缸销222和/或节锁定臂226移动到它们可自由移动的位置。因此,当缸销222和/或节臂226在吊臂致动器124的校正移动中移动到它们可自由移动的位置时,操作板220可在运动减缓器216的偏压力下移动到预期位置。然后,控制系统310可检测操作板220处于预期位置,并且继续预定的操作序列。
89.在实施例中,可进行校正操作,直到控制系统检测到操作板220处于预期位置为
止。在实施例中,控制系统310可以预定的时间间隔或在即将操作致动器214之前和刚刚操作致动器214之后的时间检测操作板220的位置。也就是说,控制系统310可监测操作板220的位置。在实施例中,控制系统310可经由用户输入装置520接收吊臂延伸/缩回指令,并且响应于接收吊臂延伸/缩回指令而启动预定的操作序列。预定的操作序列可包括用于在第一操作状态下(即,当缸销222和节锁定臂226的移动不被阻止时)使伸缩节122延伸或缩回的操作序列。在实施例中,上述控制系统310的操作可由控制器510进行和/或响应于控制器510执行程序指令来进行。
90.在实施例中,控制系统310也可能够操作地连接到辅助致动器256并可构造成控制辅助致动器256的移动。如上所述,辅助致动器256可被操作以在致动器214的操作停止的情况下控制操作板220的移动。致动器214的操作可随着驱动臂236在任何驱动臂位置(即,驱动臂第一位置da1、驱动臂中立位置n
da
和驱动臂第二位置da2)处或任何驱动臂位置之间而停止。为此,控制系统310可构造成控制辅助致动器256以定位辅助驱动臂260,使得操作板220设置在板第一位置op1、板中立位置n
op
和板第二位置op2中的一个处。控制系统310还可构造成移动辅助驱动臂260以在板第一位置op1、板中立位置n
op
和板第二位置op2之间移动操作板220。
91.例如,在实施例中,如果致动器214的操作停止,则控制系统310可操作辅助致动器256以移动辅助驱动臂260,直到操作板220由一个或多个传感器522、524被检测到在板第一位置op1、板中立位置nop和板第二位置op2之一处。然后,控制系统310可操作辅助致动器256以将操作板220在板第一位置op1、板中立位置nop和板第二位置op2之间移动已知距离。
92.在实施例中,致动器214可在总线上连接到控制系统310。总线可为can总线。在实施例中,致动器214可构造成经由总线向控制系统310提供信息。在实施例中,由致动器214提供的信息可为指示故障的信息。例如,如果致动器214已经变成被卡住(由此停止操作)或过载,则可提供故障信息。故障信息也可指示其它状态。以这种方式,控制系统310向技术人员提供故障信息。辅助致动器256可连接到控制系统310,并且以类似的方式向控制系统310提供故障信息。
93.再次参考图23,在实施例中,电子模块532可设置在吊臂致动器124上。电子模块532可为控制系统310的部分或能够操作地连接到控制系统310。致动器214可能够操作地连接到电子模块532。在实施例中,辅助致动器256也可连接到电子模块532。电子模块532可构造成监测由致动器214正汲取(drawn)的电流。控制系统310可接收指示由致动器214从电子模块532汲取的电流的信息。控制系统310可基于指示电流的信息来控制致动器214的操作。例如,响应于接收指示电流的信息(该信息指示致动器214正在汲取太多的电流),控制系统310可控制致动器214以减慢致动器214的操作速度。辅助致动器256可能够操作地连接到电子模块532并且可由控制系统310以类似方式基于指示正被汲取的电流的信息操作。
94.在实施例中,控制系统310可构造成监测锁定头组件210的温度,包括例如锁定头组件210的各个部件的温度。由锁定头组件210的电气部件(诸如致动器214)汲取的电流可能受到温度的影响。因此,在实施例中,控制系统310可能够操作地连接到一个或多个温度传感器534,并且可从一个或多个温度传感器534接收温度信息。控制系统310可基于接收到的温度信息来控制锁定头组件210的一个或多个电气部件(诸如致动器214和/或辅助致动器256)的操作。例如,控制系统310可构造成响应于温度信息来调节致动器214的速度或发
送到致动器214的最大允许电流。
95.应当理解,来自任何上述实施例的各种特征可与本文描述的其它实施例一起使用。
96.本文引用的所有专利都在此通过引用结合到本文中,无论是否在本公开的文本中明确这样做。
97.在本公开中,词语“一”或“一种”将被视为包括单数和复数两者。相反,在适当的情况下,任何对复数项目的引用都应包括单数。此外,应当理解,诸如“上”或“下”之类的涉及各种部件的取向的术语仅用于示例的目的,并且不将本公开的主题限制到特定取向。
98.从上文中将观察到,在不脱离本公开的新颖概念的真实精神和范围的情况下,可实现许多修改和变型。要理解的是,不旨在或不应当推断出关于所示的具体实施例的限制。本公开旨在覆盖落入权利要求书的范围内的所有这些修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。