技术特征:
1.一种用于伸缩吊臂的锁定头组件,所述锁定头组件包括:锁定头,其包括:基部;操作板,其能够操作地联接到所述基部;一个或多个缸销和/或一个或多个节锁定臂,其能够操作地联接到所述操作板并且能够响应于所述操作板相对于所述基部的移动而移动;致动器,其能够操作地联接到所述操作板并构造成相对于所述基部移动所述操作板,所述致动器包括马达和驱动臂,其中,所述马达构造成在驱动臂第一位置和驱动臂第二位置之间驱动所述驱动臂;和运动减缓器,其能够操作地联接到所述锁定头和所述致动器,所述运动减缓器包括壳体、至少部分地设置在所述壳体内的杆、以及设置在所述杆和所述壳体之间的偏压装置。2. 根据权利要求1所述的锁定头组件,其中:响应于所述操作板相对于所述基部的移动,一个或多个缸销能够在缩回的销位置和延伸的销位置之间移动;并且响应于所述操作板相对于所述基部的移动,所述一个或多个节锁定臂能够在锁定位置和解锁位置之间移动。3.根据权利要求1所述的锁定头组件,其中,所述运动减缓器设置在所述操作板和所述驱动臂之间并连接到所述操作板和所述驱动臂。4.根据权利要求3所述的锁定头组件,其中,当所述操作板响应于所述驱动臂的移动而移动时,所述运动减缓器处于刚性状态。5.根据权利要求3所述的锁定头组件,其中,当所述操作板在第一方向上的移动响应于所述驱动臂在所述第一方向上的移动而被阻止时,所述运动减缓器处于第一加载状态。6.根据权利要求5所述的锁定头组件,其中,当所述运动减缓器处于所述第一加载状态时,所述杆相对于所述壳体处于缩回位置,并且所述偏压装置在所述第一方向上推压所述操作板。7.根据权利要求3所述的锁定头组件,其中,当所述操作板在第二方向上的移动响应于所述驱动臂在所述第二方向上的移动而被阻止时,所述运动减缓器处于第二加载状态。8.根据权利要求7所述的锁定头组件,其中,当所述运动减缓器处于所述第二加载状态时,所述杆相对于所述壳体处于延伸位置,并且所述偏压装置在所述第二方向上推压所述操作板。9.根据权利要求1所述的锁定头组件,还包括连接到所述致动器的辅助驱动装置致动器。10.根据权利要求9所述的锁定头组件,其中,所述辅助驱动装置是包括辅助马达和辅助驱动臂的辅助致动器,并且所述致动器安装在轨道上并构造成用于响应于所述辅助驱动臂的移动而相对于所述轨道平移移动。11.一种用于起重机的伸缩吊臂,所述伸缩吊臂包括:基部节;多个伸缩节,其能够相对于所述基部节移动,以调节所述吊臂的长度;吊臂致动器,其设置在所述基部节内且能够操作以移动所述多个伸缩节中的伸缩节,从而调节所述吊臂的长度;和锁定头组件,其连接到所述吊臂致动器,所述锁定头组件包括:
锁定头,其包括:基部;操作板,其能够操作地联接到所述基部;一个或多个缸销和/或一个或多个节锁定臂,其能够操作地联接到所述操作板并且能够响应于所述操作板相对于所述基部的移动而移动;致动器,其能够操作地联接到所述操作板并构造成相对于所述基部移动所述操作板,所述致动器包括马达和驱动臂,其中,所述马达构造成在臂第一位置和臂第二位置之间驱动所述驱动臂;和运动减缓器,其能够操作地联接到所述锁定头和所述致动器,所述运动减缓器包括壳体、至少部分地设置在所述壳体内的杆、以及设置在所述杆和所述壳体之间的偏压装置。12. 根据权利要求11所述的伸缩吊臂,其中:响应于所述操作板相对于所述基部的移动,所述一个或多个缸销能够在缩回的销位置和延伸的销位置之间移动;并且响应于所述操作板相对于所述基部的移动,所述一个或多个节锁定臂能够在锁定位置和解锁位置之间移动。13.根据权利要求11所述的伸缩吊臂,其中,当所述操作板响应于所述驱动臂的移动而移动时,所述运动减缓器处于刚性状态。14.根据权利要求11所述的伸缩吊臂,其中,当所述操作板在所述第一方向上的移动响应于所述驱动臂在所述第一方向上的移动而被阻止时,所述运动减缓器处于第一加载状态。15.根据权利要求11所述的伸缩吊臂,其中,当所述操作板在所述第二方向上的移动响应于所述驱动臂在所述第二方向上的移动而被阻止时,所述运动减缓器处于第二加载状态。16.一种起重机,包括:载体;上部结构,其安装在所述载体上,所述上部结构具有伸缩吊臂,所述伸缩吊臂包括:基部节;多个伸缩节,其能够相对于所述基部节移动,以调节所述吊臂的长度;和吊臂致动器,其设置在所述基部节内且能够操作以移动所述多个伸缩节中的伸缩节,从而调节所述吊臂的长度;锁定头,其连接到所述吊臂致动器,所述锁定头包括:基部;操作板,其能够操作地联接到所述基部;一个或多个缸销和/或一个或多个节锁定臂,其能够操作地联接到所述操作板并且能够响应于所述操作板相对于所述基部的移动而移动;致动器,其能够操作地安装在所述吊臂致动器上、联接到所述操作板并构造成相对于所述基部移动所述操作板,所述致动器包括马达和驱动臂,其中,所述马达构造成在臂第一位置和臂第二位置之间驱动所述驱动臂;和运动减缓器,其能够操作地联接到所述锁定头和所述致动器,所述运动减缓器包括壳体、至少部分地设置在所述壳体内的杆、以及设置在所述杆和所述壳体之间的偏压装置。17. 根据权利要求16所述的起重机,其中:响应于所述操作板相对于所述基部的移动,所述一个或多个缸销能够在缩回的销位置和延伸的销位置之间移动;并且
响应于所述操作板相对于所述基部的移动,所述一个或多个节锁定臂能够在锁定位置和解锁位置之间移动。18.根据权利要求16所述的起重机,其中,当所述操作板响应于所述驱动臂的移动而移动时,所述运动减缓器处于刚性状态。19.根据权利要求16所述的起重机,其中,当所述操作板在所述第一方向上的移动响应于所述驱动臂在所述第一方向上的移动而被阻止时,所述运动减缓器处于第一加载状态。20.根据权利要求16所述的起重机,其中,当所述操作板在所述第二方向上的移动响应于所述驱动臂在所述第二方向上的移动而被阻止时,所述运动减缓器处于第二加载状态。21.一种用于控制伸缩吊臂的吊臂致动器的方法,所述吊臂致动器包括液压杆-缸组件和锁定头组件,所述锁定头组件具有基部、能够操作地联接到所述基部的操作板、一个或多个缸销和/或一个或多个节锁定臂,所述一个或多个缸销和/或所述一个或多个节锁定臂能够操作地联接到所述操作板并且能够响应于所述操作板相对于所述基部的移动而移动,所述方法包括:利用一个或多个位置传感器检测所述操作板的位置;由控制器将所述操作板的检测到的位置与所述操作板的预期位置进行比较;由所述控制器确定所述操作板的所述检测到的位置是否与所述操作板的所述预期位置相同;和如果所述操作板的所述检测到的位置与所述操作板的所述预期位置不相同,则控制所述液压杆-缸组件以进行校正操作,直到所述操作板被检测到在所述预期位置处为止,其中,所述操作板在来自能够操作地联接到所述操作板的运动减缓器的偏压力下移动到所述预期位置。
技术总结
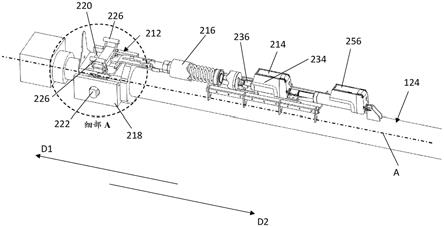
一种用于伸缩起重机(110)的吊臂(118)的锁定头组件(210)包括锁定头(212),该锁定头具有:基部(218);操作板(220),其能够操作地联接到基部;一个或多个缸销(222)和/或一个或多个节段锁臂(226),其能够响应于操作板相对于基部的移动而移动。致动器(214)能够操作地联接到操作板并且构造成相对于基部移动操作板。致动器包括马达(234)和驱动臂(236)。马达构造成在驱动臂第一位置和驱动臂第二位置之间驱动驱动臂。运动减缓器(216)连接到致动器和锁定头,并且包括壳体(238)、能够相对于壳体移动的杆(240)、以及设置在杆和壳体之间的偏压装置(242)。(242)。(242)。
技术研发人员:S
受保护的技术使用者:马尼托瓦克起重机有限责任公司
技术研发日:2020.06.24
技术公布日:2022/3/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。