1.本发明涉及用于确定容器的填充水平的装置、系统和方法,涉及包括这种装置的容器,以及涉及用于配置确定容器的填充水平的模型的方法、设备和系统。容器可以是用于容纳诸如液化气或啤酒等内容物的容器,但本发明不限于此。本发明的实施例涉及用于诸如圆筒和罐的容器的远程液位测量装置的自校准方法。
背景技术:
2.确定气瓶中含有多少气体的能力对于气瓶用户(他们希望知道他们还剩下多少,以及何时可能用完)和气瓶供应商(他们希望知道他们的客户是否已经用完并需要更换圆筒,并且最好预测他们的客户何时需要更换圆筒,以便他们可以简化他们的交付流程)都很有用。类似的原则适用于啤酒配送行业以及许多其他行业。
3.迄今为止,气体和啤酒配送行业一直在尝试提出一种解决方案,该解决方案能够将装置附接到现有气瓶或啤酒桶的外部,以数字方式测量圆筒或桶内的填充水平,通过适当的数据连接,可以远程监测液位信息。
4.已经考虑了各种非侵入性解决方案,并且在某些情况下进行了尝试。在ep0831308、us6247361、wo2009118542、ep2668484、ep2765399、ep2954317、us20140366619和us20170082477中描述了各种可能的技术。其中一些使用飞行时间作为确定的基础,但大多数使用频域分析。频域技术利用单个“峰值”或共振频率作为确定的基础,导致精度低,对环境和其他因素(如背景噪声以及容器的大小和形状)的鲁棒性差,处理大量内容物(例如在压力下以气态而不是液态形式保存的内容物)的能力差。
5.已经考虑了涉及使用机器学习的各种可能的解决方案,并且在某些情况下进行了尝试。在ch683208和us2018044159a1中描述了一些技术。这些技术需要训练模型,以将给定的声学响应与根据精确的参考水平测量装置确定的特定填充水平相关联。训练具有工业部署所需鲁棒性的模型所需的数据量使得对精确参考水平测量装置的要求不切实际。
6.任何解决方案应当优选的是连接的解决方案,以使气瓶供应商受益。作为解决方案的一部分,任何装置包都应该能够被改装到现有的气瓶队列,并且为了安全,任何装置包应该是非侵入性的。
7.本发明旨在解决现有技术的至少一些限制,并旨在提供一种解决方案,在该解决方案中,可以确定交付的容器(即,与客户一起并可能由客户使用的容器)的填充水平。
技术实现要素:
8.应当理解,填充水平,这是指内容物的量(通常是质量)。对于特定质量的内容物,容器内液体的实际表面水平(高度)可能会随温度而改变。相应地,对于特定的容器定向(例如直立),内容物的表面水平可能会上升和下降,而内容物的量不会发生变化,因此填充水平不会发生变化。应当理解,填充水平(质量)是本发明的实施例寻求跟踪的量。
9.在权利要求中限定了本发明的各个方面和特征。
10.根据一个方面,提供了一种用于配置容器模型的方法,所述容器模型为特定类型的容器和/或内容物定义声学响应的特征和相关的填充水平之间的关系,所述方法包括以下步骤:
11.在多个不同时间检测多个容器对声学刺激的声学响应;对于每个容器,获得关于时间的使用曲线(usageprofile),并将该容器的声学响应与使用曲线相关联,以形成测试数据集合;以及
12.使用测试数据计算声学响应的特征与相关的填充水平之间的关系以生成容器模型。
13.获得使用曲线的步骤包括获得容器的使用开始时间。可以根据位置信息推断所述使用开始时间,或者根据所述容器已满时获得的声学响应的测量值的声学响应变化来推断所述使用开始时间。或者,所述使用开始时间可以基于例如容器交付或销售的日期(可选的时间)等的物流/销售信息。
14.特定容器的使用曲线可以表示与时间相关的可能的填充水平,并且将该容器的声学响应与使用曲线相关联的步骤可能还包括基于获得该声学响应的时间和使用曲线确定每个声学响应的可能的填充水平,并将该声学响应与针对该声学响应确定的可能的填充水平相关联。
15.所述方法还可以包括获得使用结束时间并使用所述使用开始时间和所述使用结束时间来确定针对每个声学响应的可能的填充水平。可以根据位置信息推断所述使用结束时间,或者通过在重新填充所述容器之前确定最终填充水平推断所述使用结束时间,并且根据获得的声学响应识别达到填充水平的时间。
16.所述方法可以包括将检测到的声学响应记录为时域信号,并且将所述时域信号转换为频域表示,其中,所述声学响应的特征是频率特征。可以通过将权重和偏置应用于测试数据的频率特征的每个频率的振幅,并且改变权重和/或偏置以最小化误差函数来计算所述关系。所述误差函数可以表示由所述容器模型确定的填充水平与所述测试数据中所估计的填充水平之间的差异。
17.所述方法还包括标准化关于时间的每个容器的声学响应的使用曲线和捕获时间,以形成所述测试数据的步骤。所述计算步骤利用机器学习算法。
18.所述方法还包括获得容器的使用结束填充水平,其中,确定针对每个声学响应的可能的填充水平的步骤使用所述使用结束填充水平。
19.确定针对每个声学响应的可能的填充水平的步骤可能包括识别何时在从满到空的路径上获得声学响应,以及基于从满到空的路径的假定形状,在测量声学响应时识别可能的填充水平。从满到空的假定路径可能是线性的,或者可能是非线性的,并且例如取决于一个或更多个参数。示例参数可以包括以下中的一个或更多个:一天中的时间、一周中的一天、天气、温度和当地事件。
20.所述使用开始时间可能是由所述容器交付给客户的时间或者填充或重新填充所述容器的时间(物流信息)来确定的。相似的,所述使用结束时间是由将所述容器返回给供应商的时间或者重新填充所述容器的时间(物流信息)来确定的。
21.所述方法还包括在检测所述声学响应时测量容器处的温度,将所测量的温度与所述测试数据中的所述声学响应相关联,并且,所述计算步骤还可以使用所述测试数据计算
声学响应的特征、温度以及相关的填充水平之间的关系。
22.测量容器处的温度的步骤可以包括测量容器至少一部分外表面的温度和测量容器周围环境的温度,以及在容器表面温度与环境温度相差超过阈值量的情况下确定容器当前在使用中。
23.测量容器处的温度的步骤可以包括测量容器外表面上的多个位置处的温度,以及在跨多个位置测量到大于阈值梯度的温度梯度的情况下确定容器当前在使用中。
24.可以理解,容器内容物温度影响其体积,进而影响容器内的表面水平。表面水平和/或体积可能影响接收到的声学响应,例如,可能影响由于在容器中不同位置处从液体表面反弹的声学刺激。正是由于这些原因,对于某些类型的容器内容物,考虑温度可能很重要。
25.所述方法还可以包括在检测容器的声学响应时确定容器是否在使用中,将使用中或未使用状态与测试数据中的声学响应相关联,并且计算步骤使用所述测试数据可以计算声学响应的特征、使用中或未使用状态以及相关的填充水平之间的关系。可以基于温度测量来确定容器的所述使用中或未使用状态。
26.根据另一方面,提供了一种配置容器模型的方法,所述容器模型为特定类型的容器和/或内容物定义声学响应的特征和相关的填充水平之间的关系,所述方法包括:
27.在多个不同时间检测多个容器对声学刺激的声学响应;以及
28.使用检测到的声学响应,而不使用参考水平测量值,计算声学响应的特征与针对特定类型的容器和/或内容物的相关的填充水平之间的关系。
29.根据另一方面,提供了一种确定容器填充水平的方法,包括以下步骤:
30.检测所述容器对声学刺激的声学响应;
31.根据检测到的声学响应生成声学剖面(acousticprofile);和
32.将所述声学剖面输入到容器模型以确定所述容器的填充水平,所述容器模型为特定类型的容器和/或内容物定义声学响应的特征与相关的填充水平之间的关系;以及
33.在根据上述任一项权利要求所述的配置容器模型的方法中使用检测到的声学响应。
34.根据另一方面,提供了一种用于配置容器模型的系统,所述容器模型为特定类型的容器和/或内容物定义声学响应的特征和相关的填充水平之间的关系,所述系统包括:
35.多个声学换能器装置,每个声学换能器装置可操作以检测多个容器中的各个容器在多个不同时间对声学刺激的声学响应;
36.配置器,其可操作以获得每个容器关于时间的使用曲线,并将针对每个容器的声学响应与该容器的使用曲线相关联,以形成测试数据集合;其中
37.配置器可操作以使用测试数据计算声学响应的特征与相关的填充水平之间的关系以生成容器模型。
38.根据另一方面,提供了一种用于配置容器模型的系统,所述容器模型为特定类型的容器和/或内容物定义声学响应的特征和相关的填充水平之间的关系,所述系统包括:
39.多个声学换能器装置,每个声学换能器装置可操作以检测多个容器中的各个容器在多个不同时间对声学刺激的声学响应;和
40.配置器,其可操作以使用检测到的声学响应,而不使用参考水平测量值,计算声学
响应的特征与针对特定类型的容器和/或内容物的相关的填充水平之间的关系。
41.根据另一方面,提供了一种用于确定容器填充水平的系统,包括:
42.多个声学换能器装置,每个声学换能器装置可操作以检测各个容器对声学刺激的声学响应,并且其可操作以根据检测到的声学响应生成声学剖面;和
43.填充水平确定器,用于将声学剖面输入到容器模型以确定容器的填充水平,容器模型针对特定类型的容器和/或内容物定义声学响应的特征和相关的填充水平之间的关系;以及
44.模型配置器,用于在配置容器模型的方法中使用检测到的声学响应。
45.以这种方式,提供了一种用于训练计算机软件模型的方法,该模型用于容器(例如罐或圆筒)的刺激驱动的填充水平测量系统。总之,搅拌容器并获得相应的频率响应。将产生响应的分析与对应的给定容器内不同但未知水平的响应相结合。该方法只需要知道容器装满的时间点。该方法通过在部署时和在消耗容器的内容物时获得多个容器的响应数据来确定容器的其他(非满)填充水平。
46.该方法能够确定圆筒内或罐内的内容物的填充水平,而无需任何接触或无需直接看见内容物本身。该方法利用一种装置,该装置包含刺激部件和接收部件。例如,这可以是扬声器和麦克风。该装置定位在圆筒或罐的外表面附近。该装置可以以任何方式靠近圆筒或罐。
47.为了使装置能够确定任何给定的圆筒或罐的填充水平,系统不需要罐或内容物的任何先验知识。在采用参考水平方法来创建模型的系统中,系统可以被认为是一个两阶段的过程;配置模型和使用模型。没有参考水平,模型创建过程与使用阶段没有什么不同。
48.本发明的关键组成部分在于模型或多个模型配置的设计、创建和实现,使得无需参考水平输入即可创建模型。这使得可以使用明显更多的数据来创建模型,并且可以根据正常使用期间获得的数据定期优化和改进模型。
49.获得有效解决方案的关键是获取足够的响应数据,以构建具有商业需求所需准确性的足够稳健的模型。参考水平的要求意味着所需的数据量对于开发工作模型是不切实际的。因此本技术提出了一种不依赖于使用其他技术获得的参考水平的机器学习模型(尽管在一些实施方式中,该模型可以使用参考水平测量来“准备”)。
50.根据一种技术,提供了一种用于确定容器的填充水平的系统,包括第一声学换能器以及处理器,该第一声学换能器用于检测容器对声学刺激的声学响应,并根据检测到的声学响应产生声学剖面;该处理器用于将声学剖面输入到容器模型以确定容器的填充水平,容器模型为针对特定类型的容器和/或内容物定义声学响应的特征与相关的填充水平之间的关系。
51.由第一声学换能器测量的声学剖面随容器的填充水平而改变。这种改变可以被确定(对于特定的容器类型),并且容器模型可以表示这种改变,特别是可以提供填充水平和声学响应之间的映射。因此,本技术使用容器模型结合声学响应(由声学剖面表示)来识别容器的填充水平。
52.声学剖面可以表示频率范围,这些频率的相对(或绝对)量级提供了独特的标志。第一声学换能器可以设置在容器附近或与容器接触。在第一声学换能器是定向的情况下,它通常可以指向容器的表面。第一声学换能器可以是麦克风。该系统可以包括用于产生声
学刺激的第二声学换能器。第二声学换能器可以设置在容器附近或与容器接触。在第二声学换能器是定向的情况下,它通常可以指向容器的表面。第二声学换能器可以是扬声器。在替代示例中,不提供第二声学换能器,而是由环境噪声和/或振动替代提供声学刺激。
53.该系统可以包括换能器装置和处理装置,换能器装置包括第一声学换能器和通信单元,通信单元可操作以在换能器装置外部传输声学剖面,随后在处理装置处接收声学剖面,处理装置包括处理器。多个换能器装置可以连接到处理装置,使处理装置能够确定和监测多个容器的填充水平。处理装置可以是存储针对多种不同类型容器的容器模型的服务器,其中,换能器装置传送具有声学剖面的标识符,并且其中,处理装置可操作以使用标识符选择容器模型以与声学剖面一起使用。在这种情况下,处理装置可以能够确定和监测多种不同类型的容器和/或内容物的填充水平。标识符可以唯一地标识换能器装置,并且处理装置可以使用标识符来识别要向其发送填充水平通知的目标装置。以这种方式,可以将填充水平通知发送给相关容器的所有者(例如供应商)或用户(例如客户)。例如,与给定的个人或组织相关联的多个容器的填充水平通知可以被发送到与该个人或组织相关联的电子邮件地址、外部监测软件或便携式电子设备(例如智能手机)。
54.换能器装置可操作以将声学响应记录为时域信号,并将时域信号转换为频域表示,以形成声学剖面。然后传输频域声学剖面。或者,换能器装置可操作以将声学响应记录为时域信号,并将时域信号作为声学剖面传输。在这种情况下,处理装置可操作以在执行频域处理以识别填充水平之前将时域声学剖面转换为频域声学剖面。
55.通信单元可以被配置为接收触发信号,并对接收到的触发信号做出响应以启动填充水平测量。用这种方法,可以远程触发换能器装置。换能器装置可以包括用于将换能器装置附接到容器的附接部分,使得第一声学换能器与容器的表面接触或接近容器的表面。
56.容器可以是气体容器,例如液化气容器。然而,本技术可适用于其他类型的容器,例如开口容器、密闭容器、加压容器、包含液体、气体或固体的容器,等等。
57.还提供了一种确定容器填充水平的方法,包括以下步骤:检测容器对声学刺激的声学响应;根据检测到的声学响应生成声学剖面;以及将声学剖面输入到容器模型以确定容器的填充水平,容器模型为特定类型的容器和/或内容物定义声学响应的特征与相关的填充水平之间的关系。
58.还提供了一种用于确定容器的填充水平的换能器装置,该装置包括第一声学换能器以及处理器,第一声学换能器用于检测容器对声学刺激的声学响应,并根据检测到的声学响应生成声学剖面;处理器用于将声学剖面输入到容器模型以确定容器的填充水平,容器模型为特定类型的容器和/或内容物定义声学响应的特性与相关的填充水平之间的关系。这种类型的换能器装置执行局部填充水平确定。换能器装置可以包括显示屏或其他指示器(例如测量仪表或led组)以指示填充水平。可选地,换能器装置可以包括无线链路,例如蓝牙、wifi或3g,以在外部传输填充水平指示。
59.还提供了一种用于确定容器的填充水平的换能器装置,该装置包括第一声学换能器以及通信装置。第一声学换能器用于检测容器对声学刺激的声学响应,并根据检测到的声学响应生成声学剖面;通信装置可操作来将声学剖面从换能器装置的外部传输到处理装置,该处理装置响应于声学剖面的接收,以将声学剖面输入到容器模型以确定容器的填充水平,容器模型为特定类型的容器和/或内容物定义声学响应的特征与相关的填充水平之
间的关系。这种类型的换能器装置在外部传输声学剖面,声学剖面在单独的装置上进行处理以确定填充水平。换能器装置可以包括显示屏或其他指示器(例如测量仪表或led组)以指示填充水平。换能器装置可以包括无线链路,例如蓝牙、wifi或3g,以在外部传输针对填充水平确定的声学剖面。
60.还提供了一种初始化容器模型的方法,该容器模型用于本文描述的系统、方法或换能器装置中,该方法包括以下步骤:在容器的多个不同填充水平的每个填充水平处检测容器对声学刺激的声学响应,以及将每个声学响应与其相关的填充水平相关联以形成测试数据集合,并且使用测试数据计算声学响应的特征和相关的填充水平之间的关系以生成容器模型。应当理解,该初始化是可选的,因为本文描述的配置方法能够使用“活动”容器来配置模型。但是,在某些情况下,根据本段初始化的模型可能是有益的。在这种情况下,初始化方法还可以包括将检测到的声学响应记录为时域信号,并将时域信号转换为频域表示,其中,声学响应的特征是频率特征。该关系可以通过将权重和偏置应用于测试数据的频率特性的每个频率的振幅,并且改变权重和/或偏置以最小化误差函数来计算,误差函数表示由容器模型确定的填充水平与测试数据中包括的填充水平之间的差异。计算步骤可以利用机器学习算法。
61.根据本发明的另一方面,提供一种容器,包括如上所述的换能器装置。
62.该设计完全不依赖于任何特定频率,而是依赖于由麦克风读取的声学剖面产生的不同填充水平之间的模式关系。
63.该技术可应用于局部和远程监控、新的和现有的容器、液体和固体以及气体。在气体和啤酒行业之外还有更多潜在的机会,例如,用于汽车油箱。
附图说明
64.现在将仅参考附图以示例的方式描述本发明的实施例,参考附图中相似的部分具有相应的参考数字,并且其中:
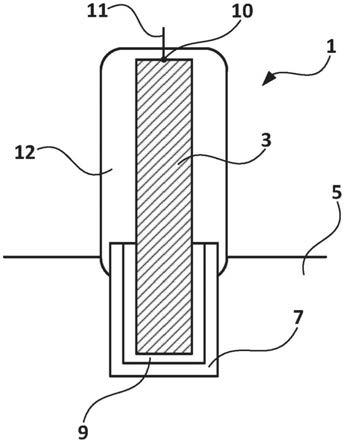
65.图1示意性地示出了根据本发明的实施例的用于确定容器的填充水平并且用于校准容器模型的系统;
66.图2是示出了由图1的系统执行的校准过程的示意流程图;
67.图3是示出了由图1的设备执行的填充水平确定过程的示意流程图;和
68.图4a、图4b和图4c示意性地示出了针对容器的示例使用曲线。
具体实施方式
69.通过利用基于声学刺激的方法,可以获得已知的容器填充水平确定系统的一些问题的解决方案,其中,安装在圆筒上的装置搅动/刺激气瓶并听取刺激的响应。该响应从时域转换为频域。频域响应被发送到计算机软件模型并由其处理以确定与该响应相关的填充水平。可以通过提供多个响应和与每个响应相关联的参考水平测量值来创建该模型。然后可以使用参考水平来调整模型以确定与每个响应相关联的正确的填充水平。
70.但是,这种模型创建方法存在许多限制。首先,需要对收集的每个数据点进行参考水平测量。这需要有组织的数据收集过程。如果将该模型用于固定环境的固定位置的单个圆筒的条件下,这将是可行的。然而,这种方法不太适合获得一个能够克服以下挑战的稳健
模型,例如但不限于:
71.·
圆筒的改变(例如凹痕、油漆厚度、制造改变)
72.·
传感器改变
73.·
环境条件(温度、大气压力、湿度)
74.·
物理位置
75.·
背景噪音
76.为了克服上述概括的许多改变的挑战,创建稳健模型所需的数据量显著增加,使得对参考水平测量值的需求变得不切实际。
77.为了克服这些限制,本发明的实施例提出了一种替代方法,该方法消除(或在某些情况下至少会减少)对相关参考水平的要求,因此使得通过正常使用获得的响应能够用于模型创建和改进。
78.这有许多明显的好处。首先,它消除或至少减少了对使用参考水平测量的特定校准过程的要求,使用参考水平测量的特定校准过程是耗时且昂贵的。其次,这意味着可以将正常使用中收集的数据用于构建模型,从而可以在更短的期限内获得更多数据量,从而获得更稳健的结果。第三,随着正常使用的继续,模型可以不断地被改进和提升,否则,如果不重新引入参考水平测量值,是不可能的。下面描述这种系统的一个示例。
79.参考图1,显示了用于确定容器30(例如罐或圆筒)的填充水平的系统10。如将在下面详细解释的,该系统既能够确定容器的填充水平,也能够更新用于确定容器的填充水平的容器模型。该系统旨在确定容器中的内容物(可以是固体、液体或气体,或这些中的两种或所有三种的组合)的量,或容器中装满的比例。该系统采用非侵入性方法,不需要对容器内部的物理访问。此外,所使用的方法并不直接检测罐的内容物,而是测量内容物(特别是内容物的数量)对容器性质的影响。
80.系统1包括扬声器105和麦克风107,它们与容器30的外表面接触或紧邻容器30的外表面。扬声器105和麦克风107都是换能器,从某种意义上说,它们各自在两种不同形式(声音或振动和电能)之间转换能量。扬声器105和麦克风107都连接到计算装置110,该计算装置110包括存储器和/或数据存储区(未示出),该存储器和/或数据存储区能够存储由麦克风107产生的电信号,例如以文件的形式(例如wav文件)存储由麦克风107产生的电信号。计算装置110还能够控制扬声器105在频率范围内以声音或振动的形式发射或直接向容器30传递声学刺激。由扬声器105发出的声音或振动可以具有恒定的或改变的音高,以及在几毫秒到几秒之间的持续时间。可以使用啁啾信号,该啁啾信号在从200hz到8000hz的频率范围内线性上升。然而,该系统也能够使用白噪声或整形白噪声(例如粉红噪声)有效地工作。其他频率范围也是可行的,并且预计选择使用的频率范围可能随容器尺寸和内容物而变化。如果扬声器105不与容器30直接接触,可以将其定位和定向为将声音引导到容器30的外部以刺激和搅动容器(及其内容物)。
81.当扬声器105以这种方式刺激罐时,容器将以形成声学响应的特征方式振动。已经发现声学响应(即,容器响应于给定的刺激而振动的方式)随着容器的填充水平而改变。例如,容器的内容物可能对声学响应具有阻尼效应,该阻尼效应优先阻尼某些频率或频率范围。容器越满,阻尼效应可能就越强烈。在任何情况下,麦克风107都会拾取容器中由扬声器105产生的刺激引起的声学响应。通常,使用两个离散换能器(扬声器和麦克风)同时进行容
器的搅动和响应的测量。基于“回声”的方法可能是可行的,在该方法中,首先搅动容器,然后停止声学刺激,然后测量声学响应(回声)。在这种情况下,可以使用相同的换能器(以不同的模式)来搅动容器和测量响应。也可以使用单个换能器同时刺激和测量,由此根据扬声器的反电动势推断测量值。在提供两个换能器的情况下,扬声器105和麦克风107可以紧密地布置在一起,或者间隔开布置。输出的结果可以通过连接到计算装置110的通信装置120作为时域声学剖面被存储或直接发送。
82.通信装置120可操作以接收来自外部触发器130的触发信号,作为对该触发信号的响应,计算装置使用扬声器105和麦克风107来搅动容器30并获得声学剖面。通信装置120可操作以将时域声学剖面传输到时频域转换器140,时频域转换器140对该时域声学剖面进行处理以将其转换成频域声学剖面。提供了一种能够将频域声学剖面转换成填充水平的模型算法150。随后将详细描述模型算法150及其训练方式。本发明可以(主要地)以局部装置或分布式系统的形式来体现。在局部装置中,扬声器105、麦克风107、计算装置110、通信装置120、触发器130、时频域转换器140和模型算法150都可以作为单个装置被提供。在这种情况下,通信装置120可以被认为是数据总线(或者可以完全省去)。在分布式装置中,扬声器105、麦克风107、计算装置110和通信装置120可以形成换能器装置,而触发器130、时频域转换器140和模型算法150形成与换能器装置分开的处理装置。还提供了与换能器装置分开的模型配置器160,其除了接收声学剖面之外还接收来自各种源的输入165。随后将描述模型配置器160的目的和功能。在分布式系统的情况下,模型算法150和模型配置器160可以被提供在相同的服务器或分别不同的服务器上。
83.应当理解,这种改变是可能的。例如,可以独立于时域转换器140和模型算法150提供触发器130(即,不是处理装置的一部分)。在一种实施方式中,触发器130可以是智能手机应用程序或软件程序的功能,该智能手机应用程序或软件程序在与被监测容器所属的个人或组织相关联的装置上运行。在这种情况下,用户可以使用智能手机应用程序或软件程序来检查容器当前的填充水平。作为响应,智能手机应用程序或软件程序可以生成触发信号,该触发信号被通信(直接地,例如通过蓝牙,或者间接地,例如通过wifi或3g和介入的电信网络)到换能器装置。然后换能器装置响应于接收到的触发信号以开始填充测量过程。
84.在另一个实施例中,时频域转换器140可以提供在换能器装置内,并且设置在计算装置110和通信装置120之间。在这种情况下,从换能器装置传输到处理装置的声学剖面是频域信号/文件而不是时域信号/文件。此外,部分模型算法可在换能器装置处提供,部分模型算法可在处理装置处提供,从而可以对从换能器装置传输到处理装置的声学剖面进行部分处理。将模型算法分布在两个装置上的一个原因可能是减小用于传输的声学剖面的大小(通过在换能器装置处对其进行部分处理),这使得在处理装置处提供的部分模型算法150能够被更新和改进并且无需向换能器装置“下载”更新内容。应当理解,在该技术的实际实施中,处理装置可以实施为中央服务器,该中央服务器与大量换能器装置通信并处理来自大量换能器装置的声学剖面。在这种情况下,可以在需要时更新由服务器执行的部分算法,而无需对换能器装置进行更新。
85.在处理装置是服务器的情况下,这可以为多个不同类型的容器存储多个容器模型。在这种情况下,换能器装置可以将容器的类型(或实例)的标识符与声学剖面一起发送,使得服务器能够使用标识符来选择正确的容器模型以与声学剖面一起使用。标识符还可以
唯一地识别换能器装置,使得服务器能够识别将向其发送填充水平通知的目标装置(例如上面指出的智能手机)。
86.通常,换能器装置将使用电池电源(未示出)进行操作。应当理解,换能器装置可以将其大部分时间花费在消耗非常少量功率的休眠模式中,并且可以定期或根据需要“唤醒”以进行测量。例如,通信装置120可以在休眠模式期间继续作为接收器操作,并且响应于触发信号以唤醒换能器装置以进行测量。或者,如果要定期进行测量,则计时器(未示出,但可能实施为通信装置120或计算装置110的一部分)可以在休眠模式期间运转,并且可以在要进行测量时触发换能器装置以唤醒。处理装置可以在服务器或通用计算机上实施,并因此使用市电供电。在替代实施例中,处理装置可以在诸如智能手机或平板电脑之类的便携式电子装置上实现,在这种情况下,处理装置也将由电池供电。
87.温度传感装置106(例如温度计)优选地设置在换能器装置处。温度传感装置106可以是在单个位置处(例如安装换能器装置的位置)测量容器外部温度的单个传感器,或者是布置成测量容器外部的各种不同位置处的温度的多个传感器。
88.(在某些实施方式中)在容器上的不同位置处提供多个温度测量值的原因是,当气体快速燃烧时,圆筒中的温度可能会受到显著的温度梯度的影响,圆筒中的温度将确定液位与内容物质量之间的精确关系。特别是,冷却效果可能非常显著。通过在不同位置处提供多个温度测量值,可以识别这一点。该信息还可用于确定容器当前是否在使用中-即,如果容器未在使用中,则没有温度梯度,或者只会检测到很小的温度梯度(低于阈值),而如果容器在使用中,则会检测到大于预定阈值的温度梯度。这使得容器模型可以针对“使用中”和“未使用”状态进行优化。
89.在更简单的、更便宜的和更实用的实施方式中,可以通过测量环境温度以及在换能器(传感器)装置附接的位置(通常是圆筒的顶部)处的圆筒温度来估计圆筒内部的温度。类似地,如果容器的温度低于环境温度的量大于阈值,则可以假定容器是“使用中”,否则“未使用”,以类似的方式确定温度梯度。
90.温度传感装置106还可以包括环境温度传感器,其测量容器所处环境的温度。在任何情况下,温度传感装置106生成一个或更多个指示各个温度测量值的信号,并将这些信号提供给计算装置110。这些信号可以与声学数据一起打包,并且这些信号与声学数据、捕获时间(声学数据和温度数据的)以及如在别处讨论的装置收集的任何其他参数一起通信至模型算法150和模型配置器160。由于给定的填充水平下容器的声学响应可根据容器的温度和/或局部环境中的环境温度而改变,因此提供温度传感装置。这种温度依赖性可以用几种方式来解释。例如,容器模型本身可能足够稳健,不仅可以将声学剖面映射到给定的填充水平,而且将与该声学剖面时间相关的一个或更多个温度读数映射到给定的填充水平。或者,可以使用单独的算法或温度相关模型(例如查找表)来补偿温度,例如通过在将声学剖面输入到容器模型之前修改声学剖面,或将模型确定的填充水平转换为报告的内容物的质量。应当理解,只有某些容器类型和/或内容物类型可能需要温度相关模型。例如液化石油气(liquefied petroleum gas,lpg)容器可能具有相对较高程度的温度相关性,而诸如酒精的饮料可能导致较低程度的温度相关性,从而可能不需要温度传感装置106。同样,对于高精度不重要的应用,监测温度可能不是必需的。为了在测量lpg时获得最佳结果,最好将温度直接输入模型并让模型学习温度关系,或者在后期处理步骤中使用温度值以有效地从液
位转换为报告的内容物的质量。
91.为了使装置能够确定任何给定的圆筒或罐的填充水平,系统需要了解,该给定的罐及其内容物如何影响当罐被给定的声学刺激搅动时获得的声学响应。这是通过配置或训练在系统内实施的模型来实现的,以确定具有那些内容物的任何该类型的罐或圆筒的填充水平。应当理解,“类型”可以指容器的尺寸(大小和形状)、容器壁的厚度、容器是封闭(密封)容器还是开口容器,以及容器的任何其他特性。一种容器可以是特定品牌的容器的特定模型。对于特定模型,对给定的声学刺激的声学响应可以预期大致相似,即使同一模型的实体之间可能由于制造改变而存在一些差异。因此,通过使用容器类型的一个实体训练模型,所得到的模型在应用于该容器类型的任何其他实体的声学响应时应该是有效的。通过使用给定的容器类型的多个实体训练模型,可以实现对容器具体实体的改变的更大的弹性。这些改变可能是由于容器损坏或应用的油漆等影响造成的。罐的内容物的性质也是相关的,因为不同的内容物可能以不同的方式影响给定的容器的声学响应。这里,内容物的性质可以包括相(液体、气体、固体或这些中的两种或更多种的组合)、化学成分、温度和/或压力。容器中的内容物对声学响应的主要影响可能是密度方面,诸如水的较重的内容物可能比诸如丁烷(作为液化气体)的较轻的内容物或完全气相内容物具有更强烈的阻尼效应。
92.本技术可以被认为是一个两阶段的过程;配置模型并应用模型。但是,由于这两个阶段的数据收集过程是相同的,因此这些过程可以同时发生;收集的数据用于使用当前模型确定填充水平,并且使用相同的数据与进一步的数据一起构建更新的改良模型。作为初始阶段,可以考虑在部署之前为模型提供一些训练数据。
93.容器模型的配置
94.当气瓶离开供应商以交付给客户时,圆筒在数据库系统中被登记为已满。可以在重新填充时、在发往客户时或在重新填充和发往客户之间的任何时间进行气瓶已满的登记。数据库系统可以是用于实现本技术的专用数据库,或者是由供应商为其他目的而操作的现有数据库。通常可以通过现有的物流记录和/或装置本身的跟踪能力获得该信息。稍后,当气瓶返回给供应商时,圆筒在数据库中被登记为未满。在实践中,绝大多数的气瓶将空着或接近空着返回。当气瓶与客户在一起时,假设气体水平会随着时间的推移而降低,并且永远不会增加。当然,它可能会在很长一段时间内保持不变。
95.随着时间的推移,单个气瓶的气体使用率和气体使用时间,从满开始是未知的。推而广之,许多圆筒的单独使用路径也是未知的。但是,通过将数据集中的圆筒的数量扩展到相对较大的数量,可以对集体做出一些假设。
96.为了解释的目的,该方法将被简化为假设气瓶使用路径总是从满到空,并且气瓶清空的时间在整个数据集上被归一化。这种归一化可以称为时间归一化,并且基于这样一个事实:一个给定的圆筒可能会在一周内通过大量使用从满到空,而另一个圆筒可能会在六个月内清空。将时间(从满)归一化到空(或已知的使用结束水平)包括忽略任何特定圆筒清空的具体持续时间,以及为该圆筒在满和空之间选择的声学剖面之间的持续时间,而是有效地将与圆筒相关的(声学剖面)捕获的事件之间的持续时间表示为圆筒在现场的时间的百分比/比例(即,满和空之间的时间段的比例),而不是以天/小时/分钟为单位的绝对时间。
97.假设数据集中所有气瓶的使用量始终呈正态分布,随着时间的推移,具有最高概
率的使用路径可能是从满到空的线性路径。这为使用路径提供了良好的起始假设,然而,可以选择任何使用路径作为起始假设,这种路径优选地被选择为代表平均使用曲线。
98.线性路径的选择基于关于整个气瓶用户客户群的气体使用情况的假设。很明显,使用率会因使用类型等多种因素而有所不同。例如,家庭取暖在冬天会比夏天使用更多的气体,而可能在白天而不是在夜间使用叉车。
99.以不同的消耗率使用所有圆筒;有些圆筒可能会在几天内清空,而有些圆筒可能需要几个月甚至更长时间。如果归一化清空圆筒所用的时间,使得圆筒在t=0时被认为是满的,而圆筒在t=1时是空的,由于关于时间的归一化,气体使用的速度已经变得独立。
100.由于归一化的使用率是独立的,中心极限定理表明使用率将非常类似于正态分布。这可以以图形方式表示,用x轴作为归一化的时间以及用y轴作为填充水平。将由一条从t=0时的满到t=1时的空的对角线反映正态分布的均值。
101.为了配置容器模型,图1的系统包括模型配置器160,其接收由时频域转换器生成的声学剖面以及声学剖面的捕获时间。应当理解,模型配置器160将是集中式运转,通常在远离水平测量装置本身的服务器或其他计算装置处执行,并且与附接到大量的容器的大量水平测量装置进行通信。模型配置器160执行机器学习过程以训练模型算法150使用的容器模型。值得注意的是,不需要提供参考水平计量仪(尽管在某些实施例中,可以使用来自参考水平计量仪的填充水平在受控条件下初始化模型),并使用大量容器中从现场捕获的声学剖面进行训练。为了做到这一点,模型配置器需要了解与使用的容器模型相关的容器类型(和内容物)的估计的填充水平和针对该给定的填充水平估计的相应的声学剖面。声学剖面优选地与用于计算当前填充水平的声学剖面相同,并且在任何情况下由附接到圆筒或罐30或靠近圆筒或罐30的麦克风107接收的信号产生。由计算装置110将来自麦克风107的信号转换成声音数据,并且随后由转换器140从时域声音数据转换成定义声学剖面的频域输出。如果需要,可以对频域输出执行进一步的信号处理步骤以形成声学剖面,例如过滤信号以去除已知对模型无用的噪声或频率范围。或者,或者加之,可以在转换到频域之前对时域信号执行信号处理。
102.在容器的使用寿命内多次获得声学剖面(即,在重新填充之间的多次)。获得每个声学剖面的时间与声学剖面相关联地存储。声学剖面可以在局部传输或存储。相同的过程发生在多个容器上。特别地,该设备的多个实体中的每一个实体独立并同时获得关于时间的声学剖面,并将其(例如,在它们被生成时,或者在容器被返回以重新填充时以累积的形式)提供给模型配置器160。可以假设每个容器的填充水平随着时间逐渐(或者迅速)降低,因此呈现出满和空的极端之间的多个填充水平。该过程的结果是一个声学剖面(大)集合,声学剖面与相应的估计填充水平相关联(针对每个填充水平的多个声学剖面,每个容器的一个声学剖面集合)。每个声学剖面可以被认为是一个频域振幅信息集合(即,表示每个频率分量的振幅的数据)。通过多层优化模型传递最高可达奈奎斯特频率的可用频域振幅信息或针对每个填充水平的麦克风的最大频率响应。
103.对于任何给定地点的任何给定的气瓶,预测水平与基于上述假设的假设水平之间的差异可以由以下误差函数确定,优化模型试图将上述获得的所有估计填充水平最小化:
104.eo=(d-yo)2105.其中,eo=输出误差
106.d=线性假设值
107.yo=模型水平值
108.应该注意的是,d和yo都是与气瓶搅动产生的输出响应相关的数据矩阵。该输出响应于来自将时域中的声音数据转换为频域中的声音数据,直到接收分量的最大频率响应的奈奎斯特频率。从多个圆筒获得的所有数据的输出误差数据通过多节点、多层优化模型,以最小化整体输出误差。这是通过将频域信息作为输入并对每个频率和每个节点处的相应振幅值应用权重和偏差来实现的,由下式给出:
[0109][0110]
其中,z=节点输出
[0111]
i=频率数据点的数量
[0112]
w=应用于每个特定输入的权重
[0113]
x=特定频率的输入振幅
[0114]
b=应用于特定输入的偏差
[0115]
然后通过以下sigmoid函数传递节点输出:
[0116][0117]
这确保了根据所应用的不同权重的输出的定义范围在0和1之间。将等式1中给出的函数应用于等式2的z,得到输出函数:
[0118][0119]
measuredfilllevel(mfl)是模型的输出。与measuredfilllevel(mfl)相关的误差函数被最小化,以使模型水平值与假设水平值匹配且差异最小。这是通过对关于权重和偏差的偏微分实现的,并且是权重和偏差变化的线性函数。示例性误差函数的简化表示定义如下:
[0120][0121]
误差函数的最小化导致在上述多层模型中设置权重和偏差,以实现准确测量的填充水平。
[0122]
此时,模型已针对给定的罐/圆筒/内容物类型进行了校准,结果是一个配置模型,该模型随后用于测量该类型和内容物的任何罐。由于以与填充水平确定相同的方式实现用于模型生成的数据收集方法,因此随着更多使用数据的积累,可以重新生成模型,从而使模型能够不断改进。
[0123]
上述解释旨在表明使用机器学习以将训练数据(在这种情况下是声学剖面集合和相关的估计填充水平)转换为模型的一般原则,该模型经过充分优化,能够将进一步的声学剖面转换为填充水平。训练数据可以表示频域信息或时域信息。机器学习技术和算法对于本领域技术人员来说将是众所周知的,并且技术人员将能够使用上述机器学习方法或许多
替代方法中的一种替代方法来实施本技术。还应该理解,可以(原则上)在不依赖机器学习的情况下得到容器模型。例如,可以对容器和/或其内容物的特征进行数学建模,并推断出可能的声学响应。
[0124]
图2和图3分别描述了由图1的系统执行的配置过程和填充水平确定过程。为简单起见,这些过程被描述为分开的过程,但实际上(如其他地方所解释的)这两个过程同时(并行)进行,其中一些步骤对两个过程是通用的。也就是说,在配置过程中利用用于填充水平确定过程的一些数据,而无需再次获得和计算该数据。
[0125]
图2显示了配置过程的高级解释,在步骤a1,附接到容器的装置1到n以完整状态交付给客户。在步骤a2,使用扬声器将声学刺激施加到用于训练算法的容器中的一个容器。在步骤a3,使用麦克风测量容器对施加的刺激的声学响应。同时,如果适用,也可以获得容器温度(通过温度传感装置)。在步骤a4,声学响应被存储为时域声学剖面。然后,时域声学剖面可以可选地进行信号处理,例如滤除噪声。在步骤a5,根据众所周知的技术将时域声学剖面转换成频域声学剖面。然后,频域声学剖面可以可选地进行信号处理,例如滤除噪声或已知对本技术无用的频率分量。在步骤a6,将声学剖面与获得它的时间相关联(有相互关系的)(如果适用,与当时的容器温度相关联),并且将声学剖面和捕获时间一起存储(和/或一起传输到模型配置器)。对于多个n个容器中的每一个容器,步骤a2至a6被执行多(m)次(即,随着时间周期性地,或者以预定时间间隔或者根据需要使用触发器130)。
[0126]
由步骤a2到a6生成的数据构成测试数据。如在别处讨论的,一些或所有数据也可用于基于容器模型的当前版本为用户提供相应容器的估计填充水平。在步骤a7,当容器与客户在一起并在使用中时,声学剖面被定期存储或传输。在步骤a8,容器从客户返回到供应仓库,可能是空的或接近空的,差不多可以肯定是未满的。在步骤a9,根据与获得的声学剖面相关的容器的假设使用函数(例如,假设在第一次使用或供应和返回仓库之间随时间线性使用)将估计填充水平应用于每个新的声学剖面。在最简单的情况下,这可以是归一化的线性函数,其从开始时间到结束时间从满到空递减,每个声学剖面都被映射到使用曲线(特别是使用曲线内的填充水平),具体取决于它的捕获时间,特别是它在使用曲线的开始时间和结束时间之间的时间位置(以百分比表示)。然后在步骤a10,使用测试数据和机器学习,以所描述的方式,在声学响应(曲线)(可选地连同容器温度和任何其他参数)的频率特征和相关的填充水平估计之间生成新的容器模型。在步骤a11,新模型被提升以替换先前的模型,然后用于根据现场声学剖面确定填充水平估计。如上面更详细地解释的,可以通过将权重和偏置应用于测试数据的频率特征(或其他特征,例如容器温度)的每个频率的振幅来计算该关系,并改变权重和/或偏差以最小化误差函数,该误差函数表示由容器模型确定的填充水平与测试数据中包含的填充水平之间的差异。计算步骤将被理解为利用机器学习算法。
[0127]
应用容器模型
[0128]
上面已经参考图1详细描述了用于使用容器模型进行填充水平确定的装置和系统的结构和操作。然而,参考训练的容器模型,并且参考图3,这里再次总结该过程。在步骤b1,声学刺激被施加到容器(通过扬声器)。在步骤b2,(通过麦克风)测量对刺激的声学响应。同时,如果适用,也可以获得容器温度(通过温度传感装置)。在步骤b3,将声学响应存储为时域声学剖面。然后,时域声学剖面可以可选地进行信号处理,例如滤除噪声。在步骤b4,根据
众所周知的技术将时域声学剖面转换成频域声学剖面。然后,频域声学剖面可以可选地进行信号处理,例如滤除噪声或已知对本技术无用的频率分量。应当理解,步骤b1到b4与步骤a2到a5基本相同,但只执行一次(通常,尽管它们可以执行多次并取平均值以减轻背景噪声的影响),并且是针对填充水平未知的容器进行的。在步骤b5,声学剖面(如果适用,温度)被输入到使用图2中所示的过程获得的容器模型中。在步骤b6,容器模型的输出被作为容器的填充水平的指示。
[0129]
虽然在上述描述中表示为算法,但应理解,一旦针对特定容器和/或内容物进行了校准,可以作为查找表提供所得到的容器模型,通过提取(优选地)声学剖面的频率特征并使用它们来参考查找表。
[0130]
参考图4a到图4c,提供了使用曲线的生成的进一步解释。在图4a中,图表显示了根据时间的特定容器的填充水平。在y(垂直)轴上,显示了从空(e)到满(f)的填充水平,中间有1/4、1/2和3/4满增量。在x(水平)轴上,显示了六个不同的事件,标记为a到f。在时间a,容器刚刚(重新)充满。在时间b,容器从(气体)供应商交付给客户。在时间c,客户第一次使用容器。在事件a之后,并且在事件b和事件c中的每一个事件中,容器都被认为是满的。在时间d,客户停止使用容器。在时间e,容器从客户返回给供应商。在时间f,容器被重新充满。在时间d和时间e时,可以假设容器是空的(或至少未满)。在可以认为相当于时间a的时间f,容器从空(或低于满)转变为满。在图4a中,这些时间中的每个时间的容器的填充水平由
“×”
表示。可以从时间c的填充水平(满)到时间d的填充水平(空)绘制一条线(从满到空)。在一些实施例中,可以知道或导出点c和点d,其可以提供最大的使用准确性。在其他实施例中,仅点a和/或点b和/或点e和/或点f可能是已知的,并且可以替代地假定点c和点d。例如,可以假设点c是在a或b之后的固定时间段,而可以假设点d是在e或f之前的固定时间段。或者,可以使用物流信息根据时间b来推断时间c,和/或根据时间e来推断时间d。或者,可以根据时间a或b到时间e或f计算从满到空的使用曲线。
[0131]
无论使用哪个开始时间和结束时间,在这些时间之间,在某些实施例中,可以假设使用是线性的,如图4a中c和d之间所示的线。因此,如果在特定时间获得声学响应,则可以通过在时间c的容器的满状态和时间d的容器的空状态之间插值来确定该特定时间的估计填充水平,并且该估计填充水平可以与该声学响应相关联。然后该过程在时间c和时间d之间重复多次,并且所得到的声学响应和填充水平被用作测试数据以训练如本文所讨论的容器模型。
[0132]
在图4b中,显示了一个简单的示例,其中在时间c(假设容器已满)、时间d(假设容器为空或处于至少未满的填充水平时)捕获声学响应,(最好是已知的——例如在重新填充时测量),并且在c和d之间的三次,特别是在x1、x2、x3处。可以看出,与x1相关联的填充水平是3/4,与x2相关联的填充水平为1/2,与x3相关联的填充水平为1/4。通过对于每个获得的声学剖面,在使用曲线的持续时间内使用声学剖面的捕获时间来预测当时可能的填充水平来实现这种关联。如在别处所讨论的,“时间”可能是指获得声学剖面的使用时间(从使用开始到使用结束)的百分比。因此,x1处的填充水平估计为3/4的原因是它在容器使用寿命的1/4处被捕获,x2处的填充水平估计为1/2的原因是它在容器的使用寿命的1/2处被捕获,x3处的填充水平被估计为1/4的原因是它在容器的使用寿命的3/4处被捕获。应当理解,这种简单的情况仅适用于线性使用曲线,但是任何使用曲线可以随时间和/或在从空到满的使用
时段内表示的一般原则使得在使用时段期间捕获的声学剖面与估计填充水平相关联,这取决于捕获时间或整个使用时段所占的比例。
[0133]
在实践中,c和d之间可能会获得相对大量的声学响应,从而提供更多的数据量来支持用于生成容器模型的机器学习的更多的测试数据,以及支持预处理技术(例如平均检测和错误检测),预处理技术可以提高输入到机器学习算法的测试数据的质量。例如,如果获得关于特定容器的一组声学剖面,则可能会忽略大约同时收集的具有与大部分声学剖面显著不同的特征(例如频率特征)的单个或少量声学剖面。此外,可以对大约在同一时间捕获的与同一容器相关的声学剖面进行平均,或以其他方式一起处理,以获得更高质量的声学剖面。
[0134]
在图4c中,示出了一个更复杂的实施方式,其中声学响应也用于提高使用曲线本身的准确性(在将填充水平与声学响应相关联之前)。在图4c中,绘制了a到m的9个声学响应。在图4c中,每个声学响应都与一个临时填充水平(基于当前容器模型)相关联,该填充水平代表该绘图。可以看出,临时填充水平通常相对于从时间a到时间f的时间降低,但不是规律的和连续的。应当理解,图4c是一种简化,实际上通常会捕获更多的声学响应。在时间a(容器刚刚充满时)捕获声学响应a。此时的填充水平非常确定。在一段时间后捕获声学响应b,并且与响应a没有变化。因此可以假设容器还没有被使用,因此还没有到达使用开始时间。在此之后捕获声学响应c,并指示填充水平的降低(第一次)。使用开始时间可以设置在捕获声学响应c时,或者在捕获声学响应b时(在检测到填充水平的降低之前捕获的最后一个声学响应),或者在b和c之间的部分时间。
[0135]
对于声学响应d和e,临时填充水平继续降低,但在声学响应f和g之间暂停降低。因此,在定义填充水平的线性(例如)降低时,实际上可以忽略f和g之间的时期。这是基于一个假设,即虽然可能需要改进容器模型以提高声学剖面映射到绝对填充水平的准确性,但在一些实施例中,填充水平没有变化的事实可以被认为是高保真的,即使绝对填充水平不可信。然而,应当注意,由于诸如背景噪声等因素,对于相同的填充水平,声学剖面不能保证是相同的,因此在一些实施例中可能需要替代技术来能够检测未使用的时期。未使用检测的相同原理适用于声学响应i和j。还可以看出,使用结束时间可以被确定为第一声学响应,第一声学响应与重新填充容器之前在时间f获得的声学响应相匹配。注意,可以在重新填充时测量添加到容器中的气体(或其他内容物)的量,从而推断在重新填充之前剩余的气体的量。以这种方式,可以高度确定地知道重新填充时的填充水平,以及使用结束时的填充水平。因此,可以通过中间时期从使用开始时间(高度确定地知道填充水平)到使用结束时间(高度确定地知道填充水平)来定义使用曲线,在中间时期期间可以忽略不使用时期,并且可以假设填充水平(恒定的或可变的)逐渐降低。此信息提供了用于训练容器模型的机器学习算法的高质量测试数据。
[0136]
如关于图4c所讨论的,可以基于捕获的声学剖面来增强使用曲线,例如通过假设在临时填充水平(或声学剖面本身)不改变的时期期间没有使用来增强使用曲线。此外,如果显示临时填充水平(内容物的质量)增加,则相关的声学剖面(可能是显示增加的声学剖面,或从其测量增加的早期错误声学剖面)可以被忽略。然而,由于难以可靠地检测不使用气体的时期,在一些实施例中,该方法被替代为依赖于使用不同使用曲线的大量圆筒的平均效应。虽然任何一个使用曲线都不太可能是线性的,但大量曲线的平均值可能是线性的。
由于训练反馈只需要平均正确,这仍然可以产生一个准确的模型。
[0137]
在上面的例子中,扬声器被用来产生声学信号以搅动容器。在替代实施例中,容器的搅动替换为依赖于背景(环境)噪声或振动。对于使用环境噪声的测量值,不需要扬声器105(从而简化并降低换能器装置的成本)。当环境噪声是可预测的、恒定的和一致的时,特别是当环境噪声与训练容器模型时存在的环境噪声基本相同的情况下,该工作的效果很好。为了在更广泛的嘈杂环境中依赖环境噪声作为刺激,可以使用第二个麦克风。这将能够比较附接到/面向圆筒的麦克风与另一个定位为主要测量环境噪声的麦克风的信号的频率内容或功率谱密度(power spectral density,psd)。然后可以通过以下两种(说明性的)方式中的一种方式处理来自两个麦克风的功率谱密度:
[0138]
(a)比较整个频谱的相对振幅,可以确定圆筒的声学频率响应。然后,该响应将形成机器学习模型(在训练期间)和容器模型(在测量期间)的输入。
[0139]
(b)或者,可以为机器学习独立地提供两个麦克风psd,并使用各种环境噪声对其进行训练。
[0140]
当环境噪声不能充分覆盖模型学习的频率范围时,选项(a)可能不如选项(b)。选项(b)可能以更漫长的训练过程为代价来应对更广泛的噪声。
[0141]
这两种方法不仅可以用于纯环境噪声,还可以用于驱动刺激和环境噪声的组合,这将提供一种非常有效的背景噪声处理方法。
[0142]
使用本技术,只要装置适当地连接到数据网络,就可以远程触发任意数量的换能器装置。这可以包括诸如wi-fi、蓝牙、4/5g或lo-ra等技术。一旦触发,如上面详细解释的,计算装置110将声音数据发送到扬声器105以搅动罐或圆筒30。麦克风107拾取容器30对该声音的频率响应的声学剖面,并且计算装置110通过通信装置120将得到的声学数据发送到时频域转换器130。从这里,数据被转换以供模型使用。提供罐或圆筒的填充水平测量值作为输出。
[0143]
可以将机器学习应用于时域中的数据而不是频域中的数据。
[0144]
本技术提供了一种低成本且有效的解决方案,其形式或装置和/或系统能够以可接受的精度非侵入性地测量圆筒和罐的填充水平。应当理解,所需的部件(麦克风、扬声器、通信和处理电路)都容易以低成本获得,并且可以使用适当的校准算法在服务器端实现本发明的大部分。
[0145]
这种方法的另一个好处是能够从远程位置根据给定的罐或圆筒获得结果。这使企业能够同时远程监测大量罐或圆筒的填充水平,而无需任何更多的帮助。
[0146]
通过在基本安静的环境中刺激容器,可以初始化容器模型以形成初始工作模型-即,基本没有背景噪声。然而,当用于确定嘈杂环境中容器的填充水平时,通过机器学习在静音环境中生成的一组样本声学剖面生成的容器模型可能不太稳健。为了提高容器模型的鲁棒性,可以在嘈杂的环境中进行训练,也可以在各种不同的嘈杂环境中进行训练。或者,可以在低噪声环境中捕获声学剖面,但可以在用于训练模型之前通过信号处理添加噪声。然后可以使用“现场”捕获的数据不断修改生成的模型。或者,该方法可以在没有初始化的情况下使用,仅使用现场数据和使用曲线假设。
[0147]
可以通过使用位置数据来进一步优化工作解决方案,可以由圆筒安装装置通过gps或wi-fi网络识别等方法直接确定这些位置数据,也可以根据物流或客户数据独立确定
这些位置数据。离开回填厂的圆筒将是满的。将圆筒从被认为是气体供应商的位置(例如灌装厂、分配中心、客户出口)移动到不被认为是气体供应商的位置可以被视为向客户交付充满的圆筒。这可以定义为使用曲线的使用开始时间。同样,当圆筒返回分配中心或出口时,可以认为圆筒不再使用(使用曲线的使用结束时间),而不是等到重新填充点。有了这个信息,从填充点到重新填充点的简单线性使用近似值可以被改进,以更准确地反映实际使用的开始和结束。
[0148]
将应用知识与客户和物流数据相结合也可用于进一步改进可能的填充水平的近似值。例如,一天中针对给定的容器或容器集合的典型使用时间,例如在营业时间内的使用,可能会进一步告知估计使用情况并因此告知填充水平。此外,与诸如天气、温度、体育赛事等因素的统计的相关性可用于改善估计。再参考图4c,可以以这种方式识别非使用时段(例如,一天中的特定时间和/或一周中特定的几天)。在较长时期内,不同的使用梯度(每单位时间的总使用比例)可以应用于使用曲线的总持续时间的不同部分。例如,如果容器中的气体用于加热,并持续数月,则使用量可能会被加权,从而在夏季月份的使用量少于冬季月份。也可以使用局部温度(例如在容器附近)——例如,可以假设在寒冷的日子比温暖的日子使用更多。换言之,在一些实施例中,使用率在使用开始时间和使用结束时间之间可能不是线性的(恒定梯度),而是可能随着使用曲线的持续时间而改变,作为某些变量的函数。改变可以处于任何时间粒度级别,例如几小时、几天、几周或几个月。
[0149]
通过利用在圆筒装满的情况下可以快速获得丰富数据这一事实,可以获得进一步的好处。如上所述,容器在交付给最终用户之前可能被认为是满的。在将圆筒发往客户并随后被使用之前,圆筒可能会用一段时间充满气体。如果模型可以区分满圆筒和非满圆筒,那么客户使用的近似值可能会被进一步细化,因为使用的起点会更准确(如上面参考图4c所解释的,第一次估计的气体水平已经下降)。换言之,如果可以提前确定圆筒已满并且先前的测量值表明圆筒已满,则可以假定圆筒尚未被使用。同样,可以为空的情况(或重新填充之前的最终填充水平,如上面参考图4c所解释的)收集大量数据点,从而可以确定使用的开始和结束,从而获得更准确的使用近似值,以训练中间水平。
[0150]
也可以通过训练模型或通过分析/关联一系列频率响应来确定水平变化与无变化。该确定还可用于提高用于训练水平确定模型的水平近似值的准确性。特别是,通过分别区分来自同一容器的两个或更多个临时的相邻的声学剖面之间的“无变化”情况,可以“打破”这一时期填充水平逐渐降低的假设,从而使使用路径更准确,同样如上面参考图4c所讨论的。
[0151]
也可以在圆筒的重新填充点并入进一步的填充水平信息。由于圆筒皮重的改变以及在完整圆筒中提供的燃气量的改变,关于填充圆筒的气体量的信息可用于确定在被填充之前圆筒中的气体量。这提供了与使用曲线的使用结束时间相关联的准确的填充水平。
[0152]
一种用于确定圆筒的填充水平的方法需要来自声学剖面的数值输出。这自然有助于利用分类和回归机器学习方法。数轴(从满到空)被分成不同的分类。实施这种分类方法是为了受益于声学剖面的模式识别。然而,前面给出的回归方法误差函数用于分类输出,它本质上是方便的数值。应该注意的是,与其他分类应用不同,本技术中使用的分类是数值连接的,这使得这种方法可行。
[0153]
该模型的当前水平确定使用多类别结果而不是连续结果方法,并使用单一的最高
概率类别结果研究方法得出填充水平。多类别将被理解为多种类别的分类模型。因此,例如,如果使用从满到空的10个不同类别,例如满到90%、89%到80%等,则模型只能在这些类别之间做出决定。相比之下,连续结果方法被称为回归模型,其中模型输出100(满)和0(空)之间的任何数字。本技术优选地使用这些方法的混合,已发现其性能更好。
[0154]
在训练中,任何类别误差都与误差的量级无关。对模型的进一步增强将包括基于误差的量级对模型进行惩罚。以这种方式对模型进行惩罚可以通过确定类别之间的数值差异来实现;也就是说,采用分类模型来确定结果。这利用了模式识别的优势。为了确定误差,可以在类别之间采用连续结果方法,从而能够使用相同的误差函数。奇异结果也可以被增强,从而提供概率结果分布以平滑奇异误差。在一个简单的实施方式中,模型可以选择概率最高的类别并忽略所有其他类别。例如,如果原始模型输出表明:“填充20%的概率是40%,填充70%的概率是30%,填充60%的概率是30%”,那么该简单的实施方式将选择填充20%,而概率分布方法会表明填充20%的建议可能是错误的。有了这些信息,就可以对要输出的填充水平做出更明智的决定。
[0155]
该模型还可以对上升的填充水平进行重罚,以进一步避免确定错误。例如,现有的误差函数可以乘以:
[0156][0157]
当估计值高于先前测量的值时,这会导致误差函数的值急剧增加。注意到,可能是由于当前数据点或先前数据点(或两者)不正确导致填充水平的明显增加。
[0158]
对于每个声学剖面,可以确定信噪比。当在捕获声学响应时存在高水平背景噪声的情况下,信噪比可能很差。具有低信噪比的声学剖面可能会被忽略(不作为训练数据的一部分),或者可能会在机器学习算法中通过惩罚进行加权。或者,声学剖面的信噪比可以表示由机器学习算法处理的测试数据内的数据点。
[0159]
也可以使用多模型方法来增加水平确定的稳健性。由于本文所描述的各种技术的实施方式在现实世界的实施中被应用和评估,预计诸如训练算法等不同的方法,将随着时间的推移而被实现和改进。此过程将产生多个模型,即简单的当前实时模型和正在评估的新模型,或者在不同条件下表现更好的潜在的多个模型。对这些不同模型的结果进行表决将减少各个模型偏差的影响。在这种情况下,每个模型都会有一个相关的错误,并且在简单的表决策略中,可以选择具有最低错误的模型。在另一实施方式中,不同模型的输出可以被组合或加权以获得结果。如果随着时间的推移,一个给定的模型被认为相对于其他模型表现不佳(因此希望失去与其他模型的对比),则可以手动将其从系统中退出。
[0160]
除了响应数据和信噪比指标外,还可以将附加数据点应用于模型训练。为其提供附加数据点的每个附加特征可以被视为添加到数据表的附加数据列(即,上面等式1中的x的新实体)。可以理解,机器学习方法本身并不“理解”数据,并且仅仅寻求最小化当前模型(迭代)的输出数据和实际(测试)数据之间的误差函数。虽然机器学习算法/模型主要旨在使用频率的振幅来最小化误差,但任何特征(例如上面和下面指出的那些)的任何数值或分类值都可以以相同的方式被处理。使用与圆筒本身相关的附加数据点将是有益的。可能会考虑为每个单独的圆筒设置一个唯一的id数据点,但实际上需要收集针对每个圆筒的重要数据,并且重要数据在实践中可能过多。另一种方法是确定单独的圆筒的“特性”。圆筒特性的示例可以包括皮重、材料、材料厚度、整体尺寸、使用年限和阀门类型。特性可以是分类
的,例如物质的,也可以是数值的,例如皮重。此外,充满圆筒时测量的响应也可以直接地或间接地形成模型的附加特性输入。因此,充满圆筒时的初始响应可用于补偿该圆筒的任何独特特征。该补偿也可以直接应用于测量的频率响应,而不是将该补偿传递给模型。对于分类数据,每个不同的可能类别值都可以映射到布尔输入,可以由模型以类似于频率响应数据值的方式轻松处理布尔输入。
[0161]
不同的操作环境将导致声学数据输出的改变。进一步的增强将包括(与每个声学响应相关的)与物理位置(无论是室内/室外)、环境温度、圆筒温度(圆筒外部的一个或更多个位置)、湿度和气压相关的数据特性。由于在圆筒使用期间lpg液体变成气体的冷却效果,圆筒温度尤其相关。可以从天气数据和/或客户/物流数据中获得该信息中的一些信息,而其他信息则需要位于装置内或靠近装置的附加传感器。附加数据特性可以作为附加参数提供给算法,以类似于频率的方式最小化误差。换句话说,应用于模型的任何附加“特性”可能只是添加到数据表中的附加数据列(上面等式1中x的新实体)。
[0162]
应当理解,在气体筒或类似物体的情况下,所捕获的声学剖面也可以根据容器当前是否在使用中(即,气体正在从容器中被释放)或未使用中而改变。通常,可以忽略使用中和未使用中的情况,并通过机器学习的鲁棒性来处理,通过使用两个圆筒的测试数据进行训练,在捕获声学剖面时,这两个圆筒在使用中和未使用。或者,当检测填充水平时,可在换能器装置处生成使用中标志,例如基于温度信息(即,如别处所述的检测到的温度梯度或容器温度与环境温度之间的差异)。然后可以使用使用中标志和声学剖面来识别填充水平。这可以通过在机器学习算法中使用使用中标志作为参数(具有两个可能的值)来实现,或者(但不太理想地)可以训练单独的容器模型来处理使用中或未使用情况,使用使用中标志在两个模型(用于训练和填充水平估计目的)之间选择生成的模型。
[0163]
也可以训练容器模型以基于捕获的声学剖面(除了识别填充水平)来确定圆筒是否在使用中,尽管有必要捕获“使用中”与“未使用”的区别以作为训练期间的另一项数据,以允许机器学习算法学习能够学会识别其中一项。在这种情况下,以类似于推断可能的填充水平的方式,也可以基于填充水平/响应是否正在变化来推断可能的“使用中”标志。同样,这样的训练数据并不准确,但平均而言是正确的,这就足够了。在替代的实施方式中,可以为该输出形成单独的模型,并且该模型比水平确定更简单,且需要更少的测试数据,且该模型可以在受控条件下进行合理的训练。自动确定容器是否在使用中的一个好处是确定何时进行下一次填充水平测量,以便(例如)在使用容器时比在不使用容器时更频繁地进行测量。例如,如果在进行填充水平测量时正在使用圆筒,则可以比在圆筒未使用时(例如在12小时后)更早(例如在1小时后)进行下一次测量。
[0164]
获得将声学响应与针对单个圆筒类型(而不仅仅是单个圆筒)的填充水平相关联的稳健容器模型的一个考虑因素是需要收集的数据量,以便为模型提供足够高的关于声学响应和相关的填充水平之间的关系的信噪比。更大的数据量(对不同填充水平的声学响应)可以滤除非填充水平对声学响应的影响,例如略微不同的圆筒、温度依赖性和环境噪声。在收集如此大量的数据时,希望获得与确定的填充水平范围中的每一个填充水平相关联的声学响应。本技术的一种替代方法是使用独立的测量设备,例如一组秤或压力计,在填充水平范围内收集针对大量圆筒的参考水平测量值。每个参考水平测量值可以与同时获得的声学响应相关联。然而,所需的数据量使实施参考测量变得不切实际。正是由于这个原因,本技
术不需要参考水平。
[0165]
本技术的实施例还具有更智能地控制功率管理的潜力,以在更广泛的应用、物流和商业环境中平衡电源寿命的测量频率。
[0166]
与时间有关的使用曲线表示容器的可能的填充水平作为(经过的)时间的函数。使用曲线可以被视为(或由其表示)在一个轴(例如x轴)上具有时间(或时间的导数,或一些其他时间相关变量)并且在另一个轴(例如y轴)上具有可能的填充水平的图表。例如,可能的填充水平轴的“单位”可以是百分位单位(0%到100%),作为从0到最大值的整数(或非整数)值,或标记值(诸如1/4、1/2、3/4、满)。时间轴的单位可以用秒、分钟、小时、天、周或月(例如)来衡量,但是如果/一旦归一化(在别处讨论的)可以简单地从“使用开始”到“使用结束”来衡量,则那是无单位的量。可以根据一条或更多条(基于时间的)使用数据,例如容器的使用开始和容器的使用结束(或再填充时间)推断或导出关于时间的使用曲线。可以预期使用曲线采用填充水平的形式,该填充水平以根据使用数据导出或推断的速率随时间降低。应当理解,虽然使用曲线定义了(可能的)填充水平和时间之间的关系,但对于多个(离散的)时间或连续时间,可能仅在(例如)单个时间(通常是开始使用)才能确定填充水平,而所有其他时间的填充水平仅仅是根据使用数据推断出的可能的填充水平。
[0167]
当获得的声学响应与使用曲线的相关部分相关联时(基于声学响应的时间信息),因此声学响应和填充水平之间的最终关系是未知的,而这仅仅是可能的。可以用时间戳记录每个声学响应的捕获(检测)时间,时间戳与声学剖面相关联(并与声学剖面一起存储/传输)。在这种情况下,通过推断每个时间戳的声学响应,并使用使用数据/曲线以及容器在时间戳指示的时间的可能的填充水平,可以将容器的声学响应与该容器的使用曲线相关联。
[0168]
应当理解,可以在将声学响应与其关联的步骤之前的任何时间,根据使用数据及其整体生成使用曲线,或者替代地,在将声学响应与其相关联的步骤时,可以动态生成使用曲线(并且可能仅部分)(例如,通过在与来自使用数据的时间戳相对应的时间确定可能的填充水平,而无需确定其他时间的填充水平)。在后一种情况下,可以认为使用曲线是逐渐建立的,因为它与不同时间的多个声学响应相关联。
[0169]
不同地解释,本方法可以被认为包括以下步骤:获得筒的使用数据,获得与筒相关的声学剖面,每个声学剖面具有相关的时间戳,对于每个时间戳,基于使用数据推断筒的可能的填充水平,并将推断的可能的填充水平与该时间戳的声学剖面相关联,以形成测试数据。如果要在与声学响应相关联之前对使用曲线(关于时间)进行归一化,那么可以理解,使用曲线和声学响应的采集时间都需要(共同)归一化,以便可以基于(归一的)时间将它们适当地相互关联。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。