一种amoled显示屏的gamma校正机构及一体化校正设备
技术领域
1.本实用新型涉及显示屏校正技术领域,尤其是指一种amoled显示屏的 gamma校正机构及一体化校正设备。
背景技术:
2.gamma校正是amoled显示屏生产中一道重要工艺,主要就是将输入的灰阶信号与屏的发光亮度关系进行调整,使得在测试仪上呈现的亮度响应曲线符合给定的gamma曲线,从而使图像显示效果更符合人眼感观。
3.现产线上gamma校正设备自动化程度不高,有些是离线的,与上下游生产工艺不能对接起来;有些是需人工上下料,效率不高。
技术实现要素:
4.为此,本实用新型所要解决的技术问题在于克服现有技术中gamma校正设备自动化程度不高、且无法实现上下游工艺对接的问题,提供一种amoled 显示屏的gamma校正机构及一体化校正设备,实现对amoled显示屏的gamma 校正,并且实现gamma校正机构与其上下流工艺段的流水线对接,实现全自动化生产,提高产能。
5.为解决上述技术问题,本实用新型提供了一种amoled显示屏的gamma 校正机构,包括分层设置的机架,在每一层所述机架上均设置有gamma校正工位,所述gamma校正工位包括数据采集单元、放屏自动压接治具、治具驱动模组以及信号发生部件;所述放屏自动压接治具承接amoled显示屏,所述放屏自动压接治具上设置有压接在amoled显示屏fpc端的连接器,通过连接器压接使amoled显示屏与信号发生部件导通,所述治具驱动模组带动放屏自动压接治具移动到数据采集单元下方,所述数据采集单元与治具驱动模组配合完成对amoled显示屏上多点的数据采集,所述信号发生部件根据采集的数据生成补偿数据,并烧录进显示屏的寄存器中,完成gamma校正。
6.在本实用新型的一个实施例中,所述数据采集单元包括数据采集部件和带动数据采集部件移动的采集部件驱动模组,所述采集部件驱动模组包括采集部件水平驱动模组和采集部件升降驱动模组,所述采集部件水平驱动模组与治具驱动模组运行的方向垂直设置,所述采集部件升降驱动模组带动数据采集部件向靠近或远离放屏自动压接治具的方向移动。
7.在本实用新型的一个实施例中,所述gamma校正工位上设置有多组数据采集单元和多组放屏自动压接治具,多组数据采集单元和多组放屏自动压接治具同步工作。
8.在本实用新型的一个实施例中,多层gamma校正工位结构相同,且能够独立运行。
9.为解决上述技术问题,本实用新型还提供了一种amoled显示屏的gamma 一体化校正设备,包括上述gamma校正机构,所述gamma校正机构的两侧分别设置有上料单元和下料单元,在所述上料单元和下料单元之间设置有多组 gamma校正机构,在所述上料单元、gamma校正机构、下料单元上方设置有搬运单元;
10.所述上料单元与上游工艺段对接,上游工艺段将处理后的amoled屏送到上料单元上;
11.所述搬运单元包括物料上料机械组件和物料下料机械组件,所述物料上料机械组件用于实现上料单元向gamma校正机构的物料搬运,所述物料下料机械组件用于gamma校正机构向下料单元的物料搬运;
12.所述下料单元与下游工艺段对接,下料单元将检测补偿后的ok品 amoled屏送到下游工艺段上。
13.在本实用新型的一个实施例中,所述上料单元包括上游来料载台、来料载台驱动模组、离子风棒、上料预对位机构、上料扫码识别机构、上料搬运机构、上料精对位校正载台、上料精对位校正驱动模组和上料精对位机构;
14.所述来料载台驱动模组带动上游来料载台依次经过离子风棒、上料预对位机构和上料扫码识别机构;预对位确定位置后,所述上料搬运机构将 amoled屏抓取到上料精对位校正载台上,所述上料精对位校正驱动模组驱动上料精对位校正载台移动到上料精对位机构的位置,通过所述上料精对位机构确定显示屏位置和fpc的位置。
15.在本实用新型的一个实施例中,多组所述gamma校正机构并排对称设置在所述搬运单元的两侧,所述搬运单元包括架设在两排gamma校正机构之间的分别与两侧gamma校正机构配合的两组物料搬运驱动模组,两组所述物料搬运驱动模组的两端均向外突出延伸设置,延伸到上料单元和下料单元的上方,每组所述物料搬运驱动模组上均设置有所述物料上料机械组件和物料下料机械组件,两组所述物料搬运驱动模组互不干涉,且每组物料搬运驱动模组上的物料上料机械组件和物料下料机械组件互不干涉。
16.在本实用新型的一个实施例中,所述物料上料机械组件和物料下料机械组件均包括吸附组件升降驱动模组、角度驱动装置和多个吸附组件,所述吸附组件升降驱动模组通过固定板设置在物料搬运驱动模组上,所述角度驱动装置设置在吸附组件升降驱动模组上,所述角度驱动装置连接有转接板,多个吸附组件间隔设置在转接板上。
17.在本实用新型的一个实施例中,所述下料单元包括下料载台、下料载台驱动模组、下料机械手、成品下料台、成品下料台驱动模组、下料对位相机和下料机械手;
18.所述下料载台承接搬运单元将检测补偿后的amoled屏,所述下料载台驱动模组带动下料载台移动到下料机械手下方,所述下料机械手将amoled 屏抓取到成品下料台上,所述成品下料台驱动模组带动成品下料台经过下料对位相机,对amoled屏对位校正,所述下料机械手抓取amoled屏运送到下游工艺。
19.在本实用新型的一个实施例中,所述下料单元上还设置有人工抽检载台,所述下料机械手将amoled屏抓取到人工抽检载台上。
20.本实用新型的上述技术方案相比现有技术具有以下优点:
21.本实用新型所述的amoled显示屏的gamma校正机构,设置多层的gamma 校正工位,实现多个amoled显示屏的校正补偿,在每个gamma校正工位中集成设置数据采集单元、放屏自动压接治具、治具驱动模组以及信号发生部件;将amoled显示屏放置在放屏自动压接治具上,通过连接器使amoled显示屏与信号发生部件导通,治具驱动模组带动放屏自动压接治具移动到数据采集单元下方,数据采集单元与治具驱动模组配合完成对amoled显示屏上多点的数据采集,信号发生部件根据采集的数据生成补偿数据,并烧录进显示屏的ic中,完
成gamma校正,校正完成后,还可以继续进行数据采集,能够检测出信号发生部件烧录的情况,实现从检查到补偿再到检测的一体化步骤,提高生产效率;
22.本实用新型所述的amoled显示屏的gamma一体化校正设备,设置上料单元和下料单元,实现gamma校正机构与上游工艺段和下游工艺的无缝对接,设置搬运单元实现amoled屏在上料单元、gamma校正机构和下料单元之间的搬运衔接,实现自动化生产、提高产能。
附图说明
23.为了使本实用新型的内容更容易被清楚的理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
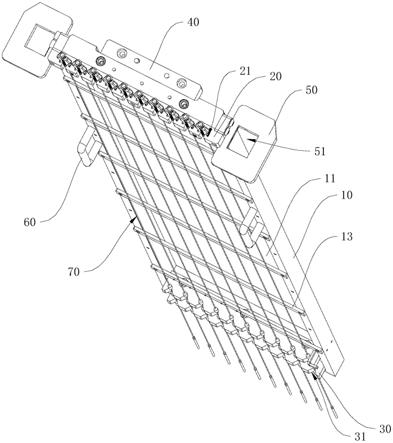
24.图1是本实用新型的amoled显示屏的gamma校正机构的结构示意图;
25.图2是本实用新型的gamma校正工位的结构示意图;
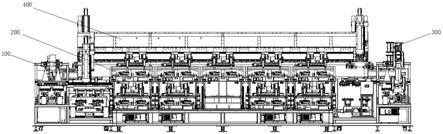
26.图3是本实用新型的amoled显示屏的gamma一体化校正设备的整体结构示意图;
27.图4是本实用新型的上料单元的结构示意图;
28.图5是本实用新型的搬运单元的结构示意图;
29.图6是本实用新型的物料上料机械组件的结构示意图;
30.图7是本实用新型的下料单元的结构示意图。
31.说明书附图标记说明:100、上料单元;110、上游来料载台;120、来料载台驱动模组;130、离子风棒;140、上料预对位机构;150、上料扫码识别机构;160、上料搬运机构;170、上料精对位校正载台;180、上料精对位校正驱动模组;190、上料精对位机构;200、gamma校正机构;210、机架;220、gamma校正工位;221、数据采集单元;2211、数据采集部件; 2212、采集部件水平驱动模组;2213、采集部件升降驱动模组;222、放屏自动压接治具;223、治具驱动模组;224、信号发生部件;300、下料单元; 310、下料载台;320、下料载台驱动模组;330、下料机械手;340、成品下料台;350、成品下料台驱动模组;360、下料对位相机;370、下料机械手; 380、人工抽检载台;400、搬运单元;410、物料搬运驱动模组;420、物料上料机械组件;421、升降驱动模组;422、角度驱动装置;423、吸附组件; 424、固定板;425、转接板;430、物料下料机械组件。
具体实施方式
32.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
33.参照图1所示,本实用新型的一种amoled显示屏的gamma校正机构,包括分层设置的机架210,在每一层所述机架210上均设置有gamma校正工位220,多层gamma校正工位220结构相同,且能够独立运行,提高gamma 校正机构200的工作效率。
34.参照图2所示,所述gamma校正工位220包括数据采集单元221、放屏自动压接治具222、治具驱动模组223以及信号发生部件224;所述放屏自动压接治具222承接amoled显示屏,所述放屏自动压接治具222上设置有压接在amoled显示屏fpc端的连接器,通过连接器压接使amoled显示屏与信号发生部件224导通,所述治具驱动模组223带动放屏自动压接治具222 移动到数据采集单元221下方,所述数据采集单元221包括数据采集部件2211和带动数据采集部件2211移动的采集部件驱动模组,所述采集部件驱动模组包括采集部件水平驱
动模组2212和采集部件升降驱动模组2213,所述采集部件水平驱动模组2212与治具驱动模组223运行的方向垂直设置,所述采集部件升降驱动模组2213带动数据采集部件2211向靠近或远离放屏自动压接治具222的方向移动,所述数据采集单元221与治具驱动模组223 配合,能够带动数据采集部件2211移动到amoled显示屏上方的任意位置,完成对amoled显示屏上多点的数据采集,所述信号发生部件224根据采集的数据生成补偿数据,并烧录进显示屏的寄存器中,完成gamma校正,校正完成后,还可以继续进行数据采集,能够检测出信号发生部件224烧录的情况,实现从检查到补偿再到检测的一体化步骤,提高生产效率。
35.具体地,为了进一步提高gamma校正机构200的工作效率,所述gamma 校正工位220上设置有多组数据采集单元221和多组放屏自动压接治具222,多组数据采集单元221和多组放屏自动压接治具222同步工作。
36.参照图3所示,本实用新型的一种amoled显示屏的gamma一体化校正设备,包括上述gamma校正机构200,所述gamma校正机构200的两侧分别设置有上料单元100和下料单元300,在所述上料单元100和下料单元300 之间设置有多组gamma校正机构200,在所述上料单元100、gamma校正机构200、下料单元300上方设置有搬运单元400,多组所述gamma校正机构 200并排对称设置在所述搬运单元400的两侧;
37.所述上料单元100与上游工艺段对接,上游工艺段将处理后的amoled 屏送到上料单元100上;
38.所述搬运单元400包括物料上料机械组件420和物料下料机械组件430,所述物料上料机械组件420用于实现上料单元100向gamma校正机构200的物料搬运,所述物料下料机械组件430用于gamma校正机构200向下料单元 300的物料搬运;
39.所述下料单元300与下游工艺段对接,下料单元300将检测补偿后的 ok品amoled屏送到下游工艺段上;
40.本实用新型所述的amoled显示屏的gamma一体化校正设备,设置上料单元100和下料单元300,实现gamma校正机构200与上游工艺段和下游工艺的无缝对接,设置搬运单元400实现amoled屏在上料单元100、gamma校正机构200和下料单元300之间的搬运衔接,实现自动化生产、提高产能。
41.参照图4所示,所述上料单元100包括上游来料载台110、来料载台驱动模组120、离子风棒130、上料预对位机构140、上料扫码识别机构150、上料搬运机构160、上料精对位校正载台170、上料精对位校正驱动模组180 和上料精对位机构190;
42.所述来料载台驱动模组120带动上游来料载台110依次经过离子风棒 130、上料预对位机构140和上料扫码识别机构150;所述离子风棒130能够消除amoled显示屏上的静电;所述上料预对位机构140能够采集amoled 显示屏放置在上游来料载台110的初步位置,以便上料搬运机构160能够吸附amoled显示屏;所述上料扫码识别150机构完成对amoled显示屏的id 记录,一个amoled显示屏对应设置一个id,用于区分识别是否已经进行了 gamma校正;预对位确定位置后,所述上料搬运机构160将amoled屏抓取到上料精对位校正载台170上,所述上料精对位校正驱动模组180驱动上料精对位校正载台170移动到上料精对位机构190的位置,通过所述上料精对位机构190确定显示屏位置和fpc的位置,便于后续搬运单元400能够精准抓取amoled屏,并将amoled屏精确运送到gamma校正机构200中的放屏自动压接治具222中。
43.参照图5所示,为了能够匹配设置在搬运单元400两侧的gamma校正机构200,所述搬运单元400包括架设在两排gamma校正机构200之间的分别与两侧gamma校正机构200配合的两组物料搬运驱动模组410,两组所述物料搬运驱动模组410的两端均向外突出延伸设置,延伸到上料单元100和下料单元300的上方,每组所述物料搬运驱动模组410上均设置有所述物料上料机械组件420和物料下料机械组件430,两组所述物料搬运驱动模组410 互不干涉,且每组物料搬运驱动模组410上的物料上料机械组件420和物料下料机械组件430互不干涉;
44.参照图6所示,所述物料上料机械组件420和物料下料机械组件430均包括吸附组件升降驱动模组421、角度驱动装置422和多个吸附组件423,所述吸附组件升降驱动模组421通过固定板424设置在物料搬运驱动模组 410上,所述角度驱动装置422设置在吸附组件升降驱动模组421上,所述角度驱动装置422连接有转接板425,多个吸附组件423间隔设置在转接板 425上;吸附组件423真空开起吸附好amoled屏后,吸附组件升降驱动模组421驱动吸附组件423上升合适高度,然后在物料搬运驱动模组410的驱动下,移到需上下料的位置,吸附组件升降驱动模组421下降,吸附组件 423真空破坏以便把屏放到对应位置,角度驱动装置422可旋转90度,以便为对面gamma校正机构200上下料。
45.参照图7所示,所述下料单元300包括下料载台310、下料载台驱动模组320、下料机械手330、成品下料台340、成品下料台驱动模组350、下料对位相机360和下料机械手370;
46.所述下料载台310承接搬运单元400将检测补偿后的amoled屏,所述下料载台驱动模组320带动下料载台310移动到下料机械手330下方,所述下料机械手330将amoled屏抓取到成品下料台340上,所述成品下料台驱动模组350带动成品下料台340经过下料对位相机360,对amoled屏对位校正,通过所述下料对位相机360确定显示屏位置和fpc的位置,便于后续下料机械手370能够精准抓取amoled屏,所述下料机械手370抓取amoled 屏运送到下游工艺。
47.具体地,所述下料单元300上还设置有人工抽检载台380,当需要进行人工抽检时,所述下料机械手370也能够将amoled屏抓取到人工抽检载台 380上。
48.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。