1.本公开涉及玻璃加工领域,具体地,涉及一种玻璃划线装置。
背景技术:
2.目前,盖板玻璃在生产过程中需要对玻璃进行多次划线切割,以得到所需尺寸的成品,玻璃切割方法通常为先用划线刀对玻璃表面进行划线,然后在掰断玻璃以实现玻璃的切割,效率低,工人劳动强度大且运营成本高,现有技术中通常采用划线装置进行划线,但是应对不同需求需要加工出不规则形状的玻璃,而现有技术中的划线装置在加工时过程很不稳定且效率低,并且加工质量差。
技术实现要素:
3.本公开的目的是提供一种玻璃划线装置,该玻璃划线装置能够解决相关技术中划线过程不稳定、效率低以及加工质量差的问题。
4.为了实现上述目的,本公开提供一种玻璃划线装置,所述玻璃划线装置包括:输送机构,设置在机架上且用于沿第一方向输送待划线玻璃;划线机构,包括用于在所述待划线玻璃上划线的刀体;移动平台,包括安装座、沿所述第一方向延伸的第一轨道和沿第二方向延伸的第二轨道,所述第二轨道可移动地设置在所述第一轨道上,所述安装座可移动地设置在所述第二轨道上,所述划线机构可沿第三方向移动地设置在所述安装座上,以接近或远离所述待划线玻璃,其中,所述第一方向和所述第二方向相交,所述第三方向与所述第一方向和所述第二方向所在的平面垂直;以及旋转机构,与所述划线机构驱动连接,用于驱动所述刀体绕平行于所述第三方向的轴线转动,以使所述刀体的进刀方向与所述刀体的移动方向相同。
5.可选地,所述划线机构包括可沿所述第三方向移动地设置在所述安装座上的安装板和设置在所述安装板上的微调机构,所述刀体连接于所述微调机构,所述微调机构用于驱动所述刀体沿所述第三方向移动。
6.可选地,所述微调机构包括第一气缸,所述第一气缸的缸体固连于所述安装板、活塞杆连接于所述刀体。
7.可选地,所述刀体包括连接体和设置在所述连接体底端的刀轮,所述连接体可绕平行于所述第三方向的轴线转动地连接于所述微调机构的输出端,所述旋转机构用于驱动所述连接体转动。
8.可选地,所述旋转机构包括第一电机和第一传动机构,所述第一电机通过所述第一传动机构驱动所述连接体转动,所述第一传动机构包括主动带轮、从动带轮以及同步带,所述主动带轮可绕自身轴线转动地设置在所述安装板上,所述从动带轮固定套接在所述连接体上,所述同步带环绕在所述主动带轮和所述从动带轮上,并且能够随着所述主动带轮的转动而传动,所述第一电机与所述主动带轮驱动连接。
9.可选地,所述安装座上设置有用于驱动所述安装板沿所述第三方向移动的第一驱
动机构,所述第一驱动机构为第二气缸,所述第二气缸的缸体固连于所述安装座、活塞杆固连于所述安装板且沿所述第三方向延伸。
10.可选地,所述玻璃划线装置还包括第二电机和第二传动机构,所述第二电机通过所述第二传动机构驱动所述第二轨道沿所述第一方向移动,所述第二传动机构包括螺纹配合的第一丝杠和第一丝母,所述第一丝杠可绕自身轴线转动地设置在所述机架上且沿所述第一方向延伸,所述第一丝母固连于所述第二轨道,所述第二电机用于驱动所述第一丝杠转动。
11.可选地,所述第一轨道构造为第一滑轨,所述第二轨道上设置有与所述第一滑轨滑动配合的第一滑块,所述第一轨道的数量为两条且分别设置在所述输送机构关于所述第一方向相对的两侧。
12.可选地,所述第二轨道上设置有第三电机和第三传动机构,所述第三电机通过所述第三传动机构驱动所述安装座沿所述第二方向移动,所述第三传动机构包括螺纹配合的第二丝杠和第二丝母,所述第二丝杠可绕自身轴线转动地设置在所述第二轨道上,所述第二丝母固连于所述安装座,所述第三电机用于驱动所述第二丝杠转动。
13.可选地,所述输送机构沿所述第一方向依次设置有来料区和加工区,所述来料区用于接收来自上游设备输送的所述待划线玻璃,所述加工区用于供所述划线机构对所述待划线玻璃划线,所述输送机构包括第四电机、主动辊、从动辊和传送带,所述主动辊和所述从动辊间隔设置且均可绕自身轴线转动地设置在所述机架上,所述传送带环绕在所述主动辊和所述从动辊上,且能够随着所述主动辊的转动而传动,所述第四电机用于驱动所述主动辊转动,所述来料区和所述加工区设置在所述传送带上。
14.通过上述技术方案,即本公开提供的玻璃划线装置,该玻璃划线装置通过与划线机构驱动连接的旋转机构,能够驱动刀体绕平行于第三方向的轴线转动,以利于刀体的进刀方向始终与刀体的移动方向相同,能够适用于加工出不规则形状的玻璃,以解决相关技术中划线不稳定、效率低以及加工质量差的问题。具体工作中,通过划线机构可沿第三方向移动地设置在安装座上,安装座可移动地设置在沿第二方向延伸的第二轨道上,第二轨道可移动地设置在沿第一方向延伸的第一轨道上。此时,划线机构沿上述第一方向或第二方向移动时,能够在待划线玻璃上划出直线,加工出例如矩形等规则形状的玻璃;另外,划线机构同时沿第一方向和第二方向移动时,通过控制划线机构沿第一方向或第二方向移动的速度,能够在待划线玻璃上划出曲线,并在此过程中,通过旋转机构驱动刀体旋转,以使刀体的进刀方向始终与刀体的移动方向相同,能够加工出曲线形的具有不规则边缘形状的玻璃;此外,在加工时,划线机构沿第三方向接近或远离待划线玻璃移动,能够控制刀体对待划线玻璃的起点位置和终点位置,以便于控制对待划线玻璃加工的启停。此外,玻璃划线装置还设置有输送机构,通过输送机构设置在机架上且用于沿第一方向输送待划线玻璃,能够减少操作人员反复搬运待划线玻璃,以利于提高工作效率且降低操作人员劳动强度。因此,本公开提供的玻璃划线装置能够解决相关技术中划线过程不稳定、效率低以及加工质量差的问题,且具有操控性好、运营成本低的优点。
15.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
16.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
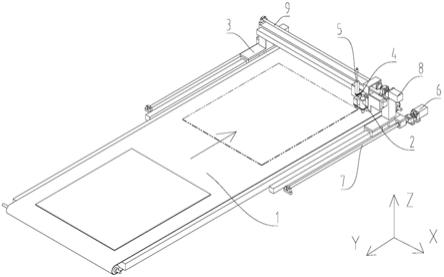
17.图1是本公开示例性实施方式中提供的玻璃划线装置的整体结构示意图;
18.图2是本公开示例性实施方式中提供的玻璃划线装置的输送机构结构示意图;
19.图3是本公开示例性实施方式中提供的玻璃划线装置的部分结构示意图;
20.图4是本公开示例性实施方式中提供的玻璃划线装置的划线机构结构示意图;
21.图5是图3中a位置的局部放大示意图。
22.附图标记说明
23.1-输送机构;110-来料区;120-加工区;130-主动辊;140-从动辊;150
‑ꢀ
传送带;2-划线机构;210-刀体;211-刀轮;212-连接体;220-安装板;230
‑ꢀ
微调机构;231-第一气缸;232-气缸支架;3-移动平台;310-安装座;320
‑ꢀ
第一轨道;321-第一滑轨;322-第一滑块;330-第二轨道;331-支承座;332
‑ꢀ
第二滑轨;333-第二滑块;4-旋转机构;410-第一电机;420-第一传动机构; 421-主动带轮;422-从动带轮;423-同步带;5-第一驱动机构;510-第二气缸; 6-第二电机;7-第二传动机构;710-第一丝杠;720-第一丝母;8-第三电机; 9-第三传动机构;910-第二丝杠;920-第二丝母。
具体实施方式
24.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
25.在本公开中,为了便于描述,针对玻璃划线装置定义三坐标,即xyz 坐标系,其中,参考图1所示,y向对应于第一方向,且对应输送机构的输送方向;x向对应于第二方向;z向对应于第三方向,且对应于竖直方向。在未作相反说明的情况下,使用的方位词如“内、外”是指相对于部件或结构本身轮廓的内、外。此外,需要说明的是,所使用的术语如“第一、第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。另外,在参考附图的描述中,不同附图中的同一标记表示相同的要素。
26.根据本公开的第一方面,提供一种玻璃划线装置,参考图1、图3以及图4所示,玻璃划线装置包括:输送机构1,设置在机架上且用于沿第一方向输送待划线玻璃;划线机构2,包括用于在待划线玻璃上划线的刀体210;移动平台3,包括安装座310、沿第一方向延伸的第一轨道320和沿第二方向延伸的第二轨道330,第二轨道330可移动地设置在第一轨道320上,安装座310可移动地设置在第二轨道330上,划线机构2可沿第三方向移动地设置在安装座310上,以接近或远离待划线玻璃,其中,第一方向和第二方向相交,第三方向与第一方向和第二方向所在的平面垂直;以及旋转机构4,与划线机构2驱动连接,用于驱动刀体210绕平行于第三方向的轴线转动,以使刀体210的进刀方向与刀体210的移动方向相同。
27.通过上述技术方案,即本公开提供的玻璃划线装置,该玻璃划线装置通过与划线机构2驱动连接的旋转机构4,能够驱动刀体210绕平行于第三方向的轴线转动,以利于刀体210的进刀方向始终与刀体210的移动方向相同,能够适用于加工出不规则形状的玻璃,以解决相关技术中划线不稳定、效率低以及加工质量差的问题。具体工作中,通过划线机构2可沿第三方向移动地设置在安装座310上,安装座310可移动地设置在沿第二方向延伸的第
二轨道330上,第二轨道330可移动地设置在沿第一方向延伸的第一轨道320 上。此时,划线机构2沿上述第一方向或第二方向移动时,能够在待划线玻璃上划出直线,加工出例如矩形等规则形状的玻璃;另外,划线机构2同时沿第一方向和第二方向移动时,通过控制划线机构2沿第一方向或第二方向移动的速度,能够在待划线玻璃上划出曲线,并在此过程中,通过旋转机构 4驱动刀体210旋转,以使刀体210的进刀方向始终与刀体210的移动方向相同,能够加工出曲线形的具有不规则边缘形状的玻璃;此外,在加工时,划线机构2沿第三方向接近或远离待划线玻璃移动,能够控制刀体210对待划线玻璃的起点位置和终点位置,以便于控制对待划线玻璃加工的启停。此外,玻璃划线装置还设置有输送机构1,通过输送机构1设置在机架上且用于沿第一方向输送待划线玻璃,能够减少操作人员反复搬运待划线玻璃,以利于提高工作效率且降低操作人员劳动强度。因此,本公开提供的玻璃划线装置能够解决相关技术中划线过程不稳定、效率低以及加工质量差的问题,且具有操控性好、运营成本低的优点。
28.其中,为更好的进一步提高玻璃划线装置划线的效果且便于操控划线机构2的移动方向,第一方向和第二方向可以相互垂直且均平行于水平方向,图3示例性地示出沿第一方向延伸的第一轨道320以及沿第二方向延伸的第二轨道330的具体实施方式,这样,能够便于操控刀体210移动,以利于更好的保证玻璃划线装置划线的效果。
29.划线机构2可以根据实际应用需求以任意合适的方式构造,例如,在一些实施方式中,参考图1、图3、图4以及图5所示,划线机构2包括可沿第三方向移动地设置在安装座310上的安装板220和设置在安装板220上的微调机构230,刀体210连接于微调机构230,通过微调机构230驱动刀体 210沿第三方向移动,能够调节刀体210划线时的压力,以利于保证一定的划线深度,提高划线的效果。其中,安装板220可以构造为参考图5所示的 l形板,这样,通过一端面可沿第三方向移动地设置在安装座310上,另一端面上固连于微调机构230,能够保证最优的空间利用率且整体外观布局更美观。
30.在一些具体的实施方式中,参考图4所示,微调机构230包括第一气缸 231,第一气缸231的缸体固连于安装板220、活塞杆连接于刀体210,通过调整第一气缸231的进气压力来控制刀体210划线时的压力,以保证一定的划线深度。其中,第一气缸231通过气缸支架232固连于安装板220,这样,能够进一步提高活塞杆带动刀体210移动时整体的稳定性,以利于玻璃划线装置稳定地对待划线玻璃进行划线,图4示例性地示出气缸支架232结构的具体实施方式。
31.刀体210可以根据实际应用需求以任意合适的方式构造,例如,在一些实施方式中,参考图4所示,刀体210包括连接体212和设置在连接体212 底端的刀轮211,通过刀轮211抵接在待划线玻璃上,能够保证增加切削面积,以利于更稳定快速的进行划线。并且,连接体212可绕平行于第三方向的轴线转动地连接于微调机构230的输出端,图4示例性地示出了连接体212 可转动地连接于第一气缸231的活塞杆的实施方式,旋转机构4用于驱动连接体212转动,这样,既能够保证刀体210具有一定的划线深度,又能够保证刀体210的进刀方向与刀体210的移动方向相同。此外,为了增强连接体 212转动时的稳定性,气缸支架232可以构造为筒状,第一气缸231的活塞杆延伸至气缸支架232中并与连接体212连接,连接体212延伸至气缸支架 232内的杆体部分与气缸支架232之间设置有多组轴承,图4示例性地示出多组轴承安装位置的具体实施方式,这样,能够减少连接体212与气缸支架 232支架的
滑动摩擦,以利于连接体212更好的转动,保证了玻璃划线装置稳定划线以及更好的划线效果。
32.在一些实施方式中,参考图4所示,连接体212可以构造为滚珠花键的结构,该滚珠花键包括花键轴、外筒、钢球以及密封圈,花键轴套接在外筒内部且花键轴上具有容纳钢球的负载球道,并且外筒内部也具有容纳对应钢球的非负载球道,通过密封圈将钢球锁止在球道内,刀轮211通过支架可绕自身轴线转动地安装在花键轴的底端,这样,旋转机构4驱动外筒转动时同步带动花键轴转动,进而能够改变刀轮211的进刀方向,同时,第一气缸231 能够驱动连接体212可沿第三方向的移动。在另一些实施方式中,连接体212 可以构造为枢转轴,该枢转轴的顶端可以通过例如轴承可转动地连接于第一气缸231的活塞杆、底端设置刀轮211,旋转机构4通过驱动该枢转轴转动来改变刀轮211的进刀方向。
33.旋转机构4可以根据实际应用需求以任意合适的方式构造,例如,在一些实施方式中,参考图3和图4所示,旋转机构4包括第一电机410和第一传动机构420,第一电机410通过第一传动机构420驱动连接体212转动,第一传动机构420包括主动带轮421、从动带轮422以及同步带423,主动带轮421可绕自身轴线转动地设置在安装板220上,从动带轮422固定套接在连接体212上,同步带423环绕在主动带轮421和从动带轮422上,并且能够随着主动带轮421的转动而传动,第一电机410与主动带轮421驱动连接,这样,通过同步带423具有的良好的弹性,在工作中能够缓和冲击和振动,运动平稳且噪音小,能够保证玻璃划线过程的稳定性,并且具有结构简单、制造容易、安装和维修方便以及成本较低的优点。其中,第一电机410 可以采用伺服电机或步进电机等任意合适的电机,本公开在此不作具体限定。
34.在一些实施方式中,参考图1和图3所示,安装座310上设置有用于驱动安装板220沿第三方向移动的第一驱动机构5,第一驱动机构5为第二气缸510,第二气缸510的缸体固连于安装座310、活塞杆固连于安装板220 且沿第三方向延伸,能够便于调节刀体210接近或远离待划线玻璃,以利于提高玻璃划线装置的操控性。
35.为了提高玻璃划线装置的工作效率以及降低工人劳动强度,在一些实施方式中,参考图1和图3所示,玻璃划线装置还包括第二电机6和第二传动机构7,第二电机6通过第二传动机构7驱动第二轨道330沿第一方向移动,第二传动机构7包括螺纹配合的第一丝杠710和第一丝母720,第一丝杠710 可绕自身轴线转动地设置在机架上且沿第一方向延伸,第一丝母720固连于第二轨道330,第二电机6用于驱动第一丝杠710转动,这样,通过数控器反馈信号给第二电机6自动控制第二轨道330沿第一方向移动。其中,第二电机6可以采用伺服电机或步进电机等任意合适的电机,第一丝杠710的首尾端可以通过两个轴承座支撑设置在机架上。
36.第一轨道320可以根据实际应用需求以任意合适的方式构造,例如,在一些实施方式中,参考图1和图3所示,第一轨道320构造为第一滑轨321,第二轨道330上设置有与第一滑轨321滑动配合的第一滑块322,第一轨道 320的数量为两条且分别设置在输送机构1关于第一方向相对的两侧,这样,能够保证第二轨道330稳定的移动,以利于划线过程的稳定。另外,参考图3所示,对应两条第一滑轨321,可以在第二轨道330的两端分别设置第二电机6和第二传动机构7,以使得第二轨道330的两端受力均衡,能够提高划线过程的稳定性。
37.在一些实施方式中,参考图3所示,第二轨道330可以包括支承座331 和设置在支承座331上且沿第二方向延伸的第二滑轨332,第一丝母720、第一滑块322固连于支承座
331,安装座310上还设置有与第二滑轨332滑动配合的第二滑块333。图3示例性地示出了支承座331构造为u型架时的实施方式,该u型架的开口侧的两端分别滑动地连接于两个第一滑轨321。
38.为了提高玻璃划线装置的工作效率以及降低工人劳动强度,在一些实施方式中,参考图1和图3所示,第二轨道330上设置有第三电机8和第三传动机构9,第三电机8通过第三传动机构9驱动安装座310沿第二方向移动,第三传动机构9包括螺纹配合的第二丝杠910和第二丝母920,第二丝杠910 可绕自身轴线转动地设置在第二轨道330上,第二丝母920固连于安装座 310,第三电机8用于驱动第二丝杠910转动,这样,通过数控器反馈信号给第三电机8,以自动控制安装座310沿第二方向移动。其中,第三电机8 可以采用伺服电机或步进电机等任意合适的电机,并且,第二丝杠910的首尾端可以通过两个轴承座支撑设置在支承座331上,本公开在此不作具体限定。
39.输送机构1可以根据实际应用需求以任意合适的方式构造,例如,在一些实施方式中,参考图1和图2所示,输送机构1沿第一方向依次设置有来料区110和加工区120,来料区110用于接收来自上游设备输送的待划线玻璃,加工区120用于供划线机构2对待划线玻璃划线,能够减少操作人员反复搬运待划线玻璃,以利于提高工作效率且降低操作人员劳动强度。并且,输送机构1包括第四电机、主动辊130、从动辊140和传送带150,主动辊 130和从动辊140间隔设置且均可绕自身轴线转动地设置在机架上,传送带150环绕在主动辊130和从动辊140上,且能够随着主动辊130的转动而传动,第四电机用于驱动主动辊130转动,来料区110和加工区120设置在传送带150上,通过数控器反馈信号给第四电机自动控制主动辊130转动,进而带动绕设在主动辊130和从动辊140上的传送带150移动,能够自动输送待划线玻璃,以利于提高玻璃划线装置的工作效率以及降低工人劳动强度。其中,第四电机可以采用伺服电机或步进电机等任意合适的电机驱动,本公开在此不作具体限定。
40.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
41.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
42.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。