1.本发明涉及钢结构桥桁架焊接技术领域,特别涉及一种钢结构桥梁桁架自动焊接机器人。
背景技术:
2.焊接机器人是从事焊接的工业机器人。根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,用于工业自动化领域;
¸ö½á¹¹çåèì¼ü
时一种复杂的焊接结构是将大量的钢架以不同角度焊接在主体架上的,在这种焊接作业中,需要将钢架与主体架对接,然后进行焊接,这种人工对接的方法,很容易造成那个对接不稳定以及发生安全事故,焊接效率低下。
3.公开号为cn213380054u的中国实用新型专利公开一种钢结构焊接机器人的焊件定位装置,该专利实现了简单方便的固定焊件功能,并且可以随意的调节焊件的旋转角度,使得焊件可以全角度无死角的接受焊接机器人的焊接,但该焊接没有解决上述关于钢架对接的技术问题。
技术实现要素:
4.针对上述技术问题,本发明提出一种钢结构桥梁桁架自动焊接机器人,解决了目前桁架焊接作业中,需要对焊接材料进行对接的技术问题,能在对接中进行位置调整,减少了事故发生率。
5.本发明所使用的技术方案是:一种钢结构桥梁桁架自动焊接机器人,包括机架,机架的底端固定设置有支撑气缸,机架的上下端分别滑动设置有焊接部件;焊接部件上旋转安装有两个拼接齿圈,任意一个拼接齿圈上活动设置有焊接组件,两个拼接齿圈拼接成封闭区域时,焊接组件在封闭区域运动,机架上活动设置有角度调节部件,角度调节部件包括两个角度架,角度架活动安装在机架上,角度架上活动设置有驱动部件,角度架由驱动部件驱动,机架的端面上设置有限位孔,角度架上旋转设置有限位部件,限位部件与限位孔有配合关系,角度调节部件还包括两个连接板,两个连接板上滑动安装有用于夹持材料的夹持部件,连接板的两端滑动设置有测量部件。
6.进一步的,所述角度架上旋转设置有支撑轮,支撑轮在机架外壁的滚槽中运动,角度架上的内壁设置有机架轮齿,角度架上旋转安装有驱动转轴,驱动转轴上固定连接有驱动齿轮一和驱动齿轮二,驱动齿轮二与角度架内壁上的机架轮齿啮合,驱动齿轮一由驱动部件驱动。
7.进一步的,所述角度架上固定连接有连接柱,连接柱的一端与连接板固定连接,连接板与角度架之间旋转安装有调节丝杆,调节丝杆朝角度架的一端上固定连接有丝杆齿轮和控制气缸,控制气缸的活塞杆上旋转安装有套筒,套筒与驱动部件旋转连接,丝杆齿轮由驱动部件驱动。
8.进一步的,所述调节丝杆上以螺纹配合设置有丝杆滑座,丝杆滑座的上下表面分
别旋转安装有调节连杆,调节连杆的一端旋转连接有顶杆滑块,顶杆滑块滑动安装在连接板上,连接板上固定连接有顶杆,顶杆的一端驱动测量部件。
9.进一步的,所述测量部件包括气缸座,气缸座滑动安装在连接板上,气缸座与连接板之间设置有用于提供弹力的弹簧,气缸座上固定安装有测量气缸,测量气缸的活塞杆上设置有位置传感器。
10.进一步的,所述驱动部件包括齿圈转轴,齿圈转轴与套筒旋转连接,齿圈转轴的两端分别旋转连接有移动滑座,移动滑座滑动安装在角度架上,其中一个移动滑座上固定安装有驱动电机,驱动电机的输出轴与齿圈转轴的一端固定连接,所述齿圈转轴上固定连接有驱动齿圈,驱动齿圈的圆周面和一个端面上分别设置有轮齿,移动滑座上固定连接有限位齿条,限位齿条驱动限位部件。
11.进一步的,所述限位部件包括限位齿轮,限位齿轮旋转安装在角度架上,限位齿轮上以螺纹配合设置有配合螺杆,配合螺杆与限位孔有配合关系。
12.进一步的,所述夹持部件包括两个调整座,两个调整座分别滑动安装在两个连接柱上,调整座上固定安装有调整电机,调整电机的输出轴上固定连接有调整齿轮,连接板上固定连接有固定齿条,调整电机与固定齿条啮合,所述两个调整座上滑动安装有推架,推架上固定安装有用于夹持材料的夹持气缸,推架与调整座之间构成螺旋副。
13.进一步的,所述焊接部件包括位置滑座,位置滑座滑动安装在机架上,机架上旋转安装有丝杆,机架上固定安装有丝杆电机,丝杆电机的输出轴与丝杆固定连接,位置滑座与丝杆构成螺旋副,位置滑座上固定安装有气缸一,气缸一的活塞杆上固定安装有气缸二,气缸二的活塞杆上固定连接有
º¸½ó°²×°åì
,两个拼接齿圈分别旋转安装在
º¸½ó°²×°åì
上,焊接安装盘上固定安装有拼接电机,拼接电机的输出轴与拼接齿圈固定连接,所述焊接组件包括环绕座,环绕座活动安装在拼接齿圈上,环绕座上固定设置有径向气缸,
»
·
èæ×ù
上旋转安装有环绕齿轮,
»
·
èæ×ù
上固定安装有环绕电机,环绕电机的输出轴与环绕齿轮固定连接,环绕齿轮与拼接齿圈内壁啮合。
14.本发明与现有技术相比的有益效果是:(1)本发明中的测量部件能使主体架之间的距离得到检测,使得上下两端的测量气缸的距离与主体钢架的距离相同,呈现一个便于可肉眼观察的距离,便于后续对钢架位置的调整;(2)本发明通过焊接部件对焊接区域进行焊接,使焊接区域位于两个拼接齿圈拼接而行成的封闭区域中,代替人工焊接;(3)本发明能对焊接钢架进行位置调整以实现焊接区域的对接,代替人工对接,减少事故。
附图说明
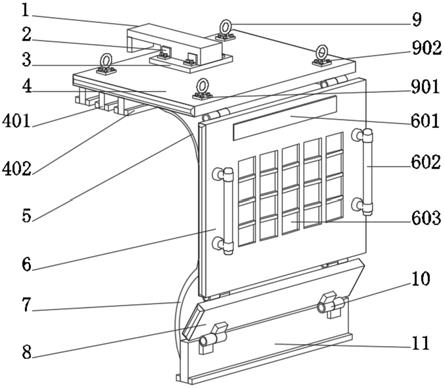
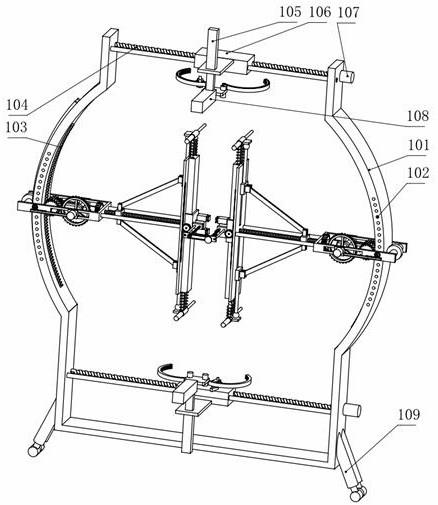
15.图1为本发明整体结构示意图。
16.图2为本发明驱动部件和限位部件结构示意图。
17.图3为本发明夹持部件结构示意图。
18.图4为本发明角度调节部件结构示意图。
19.图5为本发明焊接部件结构示意图。
20.附图说明:101-机架;102-限位孔;103-机架轮齿;104-丝杆;105-气缸一;106-位置滑座;107-丝杆电机;108-气缸二;109-支撑气缸;110-角度架;111-配合螺杆;112-限位齿轮;113-限位齿条;114-驱动电机;115-驱动齿轮一;116-驱动齿轮二;117-驱动转轴;
118-移动滑座;119-齿圈转轴;120-驱动齿圈;121-控制气缸;122-丝杆齿轮;123-丝杆滑座;124-支撑轮;125-调节丝杆;126-调节连杆;127-连接柱;128-顶杆滑块;129-连接板;130-顶杆;131-弹簧;132-测量气缸;133-气缸座;134-固定齿条;135-调整电机;136-调整齿轮;137-调整座;138-夹持气缸;139-安装座;140-连接滑杆;141-滑杆板;142-带轮;143-传动皮带;144-操作盘;145-焊接安装盘;146-拼接齿圈;147-拼接电机;148-径向气缸;149-环绕座;150-环绕齿轮;151-环绕电机;152-操作螺杆。
具体实施方式
21.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
22.实施例:如图1、图2、图3、图4、图5所示,一种钢结构桥梁桁架自动焊接机器人,包括机架101,机架101的底端固定设置有支撑气缸109,机架101的上下端分别滑动设置有焊接部件,焊接部件上旋转安装有两个拼接齿圈146,任意一个拼接齿圈146上活动设置有焊接组件,两个拼接齿圈146拼接成封闭区域时,焊接组件在封闭区域运动。
23.焊接部件包括位置滑座106,位置滑座106滑动安装在机架101上,机架101上旋转安装有丝杆104,机架101上固定安装有丝杆电机107,丝杆电机107的输出轴与丝杆104固定连接,位置滑座106与丝杆104构成螺旋副,位置滑座106上固定安装有气缸一105,气缸一105的活塞杆上固定安装有气缸二108,气缸二108的活塞杆上固定连接有焊接安装盘145,两个拼接齿圈分别旋转安装在焊接安装盘145上,焊接安装盘145上固定安装有拼接电机147,拼接电机147的输出轴与拼接齿圈146固定连接,焊接组件包括环绕座149,环绕座149活动安装在拼接齿圈146上,环绕座149上固定设置有径向气缸148,环绕座149上旋转安装有环绕齿轮150,环绕座149上固定安装有环绕电机151,环绕电机151的输出轴与环绕齿轮150固定连接,环绕齿轮150与拼接齿圈146内壁啮合。
24.机架101上活动设置有角度调节部件,角度调节部件包括两个角度架110,角度架110活动安装在机架101上,角度架110上旋转设置有支撑轮124,支撑轮124在机架101外壁的滚槽中运动,角度架110上的内壁设置有机架轮齿103,角度架110上旋转安装有驱动转轴117,驱动转轴117上固定连接有驱动齿轮一115和驱动齿轮二116,驱动齿轮二116与角度架110内壁上的机架轮齿103啮合,驱动齿轮一115由驱动部件驱动;角度架110上固定连接有连接柱127,连接柱127的一端与连接板129固定连接,连接板129与角度架110之间旋转安装有调节丝杆125,调节丝杆125朝角度架110的一端上固定连接有丝杆齿轮122和控制气缸121,控制气缸121的活塞杆上旋转安装有套筒,套筒与驱动部件旋转连接,丝杆齿轮122由驱动部件驱动;调节丝杆125上以螺纹配合设置有丝杆滑座123,丝杆滑座123的上下表面分别旋转安装有调节连杆126,调节连杆126的一端旋转连接有顶杆滑块128,顶杆滑块128滑动安装在连接板129上,连接板129上固定连接有顶杆130,顶杆130的一端驱动测量部件。
25.角度架110上活动设置有驱动部件,驱动部件包括齿圈转轴119,齿圈转轴119与套筒旋转连接,齿圈转轴119的两端分别旋转连接有移动滑座118,移动滑座118滑动安装在角度架110上,其中一个移动滑座118上固定安装有驱动电机114,驱动电机114的输出轴与齿圈转轴119的一端固定连接,齿圈转轴119上固定连接有驱动齿圈120,驱动齿圈120的圆周面和一个端面上分别设置有轮齿,移动滑座118上固定连接有限位齿条113,限位齿条113驱
动限位部件。
26.机架101的端面上设置有限位孔102,角度架110上旋转设置有限位部件,限位部件包括限位齿轮112,限位齿轮112旋转安装在角度架110上,限位齿轮112上以螺纹配合设置有配合螺杆111,配合螺杆111与限位孔102有配合关系。
27.角度调节部件还包括两个连接板129,两个连接板129上滑动安装有用于夹持材料的夹持部件,夹持部件包括两个调整座137,两个调整座137分别滑动安装在两个连接柱127上,调整座137上固定安装有调整电机135,调整电机135的输出轴上固定连接有调整齿轮136,连接板129上固定连接有固定齿条134,调整电机135与固定齿条134啮合,两个调整座137上滑动安装有推架,推架上固定安装有用于夹持材料的夹持气缸138,推架与调整座137之间构成螺旋副;推架包括连接滑杆140,丝杆104滑动安装在调整座137上,连接滑杆140的两端分别固定连接有安装座139和滑杆板141,夹持气缸138固定安装在安装座139上,安装座139和滑杆板141之间旋转安装有操作螺杆152,操作螺杆152与调整座137构成螺旋副;操作螺杆152的一端固定连接有皮带传动结构,皮带传动结构包括两个带轮142,带轮142固定连接在操作螺杆152的一端,两个带轮142通过传动皮带143连接,其中一个带轮142上固定设置有操作盘144。
28.连接板129的两端滑动设置有测量部件,测量部件包括气缸座133,气缸座133滑动安装在连接板129上,气缸座133与连接板129之间设置有用于提供弹力的弹簧131,气缸座133上固定安装有测量气缸132,测量气缸132的活塞杆上设置有位置传感器。
29.在执行本发明时:两个焊接主体架位于装置前方,需要将钢架焊接在两个主体架之间,普遍方式是需要人工将焊接钢架呈预设角度拼接在主体架之间后才能进行焊接;首先通过支撑气缸109调节整个装置的高度,使得装置处于主体架前合适的位置,先利用测量气缸132活塞杆上的位置传感器对主体架之间的距离进行检测,测量气缸132的位置是通过调节丝杆125转动,以使丝杆滑座123移动,在调节连杆126作用下,顶杆滑块128移动,并使顶杆130的一端对气缸座133进行挤压,进而使得测量气缸132的位置移动,上下端的测量气缸132的活塞杆分别接触到主体架的表面时,在位置传感器的作用下,使主体架之间的距离得到检测,即使得上下两端的测量气缸132的距离与主体钢架的距离相同,呈现一个便于可肉眼观察的距离,便于后续对钢架位置的调整。
30.然后通过夹持气缸138将焊接钢架进行夹持,由于人工将钢架放置在夹持气缸138之间时,位置并不精确,影响后续拼接,因此需要对钢架的位置进行调整,通过调整电机135驱动调整齿轮136,在齿轮齿条啮合下,使得调整座137移动,进而使钢架移动,并使钢架的上下两端分别与上下两端的测量气缸132位置对齐。
31.在带角度对接时,通过驱动部件驱动驱动齿轮一115,使得驱动齿轮二116转动,在齿轮啮合下,角度架110和钢架整体转动,使得钢架与主体架之间形成角度,需要说明的是,测量部件也能在倾斜角度下进行测量,即测量呈角度焊接时的对接距离;还需要说明的是,调节丝杆125和驱动齿轮一115均为驱动部件驱动,驱动部件在驱动丝杆齿轮122时,即驱动齿圈120端面上的轮齿与丝杆齿轮122啮合,驱动电机114驱动驱动齿圈120,使调节丝杆125转动,此时配合螺杆111是与机架101上的限位孔102配合的,即对角度架110的位置进行限制,当控制气缸121控制驱动部件移动并对驱动齿轮一115进行驱动时,即驱动齿圈120圆周
上的轮齿与驱动齿轮一115啮合时,在限位齿条113与限位齿轮112的啮合下,配合螺杆111移动并与限位孔102脱离配合,使得角度架110不被限制,实现角度调整。
32.通过操控操作盘144,在皮带传动下,使得操作螺杆152转动,进而使得夹持气缸138携带着钢架一起达到主体架位置并进行对接,前面对钢架位置的调整,能利用点动控制,使得钢架的位置进行微调,在对接过程中也可通过点动进行微调,这是因为主体架位于装置的一侧,人员在装置另一侧,为便于观察钢架位置,就需要上下两个测量气缸132形成一个距离参考对象。
33.钢架对接好后,通过气缸一105控制下方的焊接组件位置,使得焊接组件位于焊接处的高度位置,气缸二108控制焊接组件与焊接处的距离,使焊接区域位于两个拼接齿圈146之间,通过拼接电机147驱动拼接齿圈146,使两个拼接齿圈146拼接成完整的圆形区域,使得焊接组件能围绕焊接区域进行焊接,其围绕是利用环绕电机151驱动环绕齿轮150,在齿轮啮合下,使得环绕座149进行运动,相关人员将焊接用的焊接器设置在径向气缸148的活塞杆上,使焊接器能够进行径向位置调整;机架101的上下两端分别设置有焊接部件,通过丝杆电机107驱动丝杆104,使焊接部件进行横向调整,即上下两个焊接部件同时对两处焊接区域进行焊接,本发明在作业过程中,代替了人工对接调整,也减少了事故的发生。
34.本发明不局限上述具体实施方式,所属技术领域的技术人员从上述构思出发,不经过创造性的劳动,做出的种种变换,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。