:
1.本发明属于工程机械车设备技术领域,更具体地涉及一种轮式工程机械缓速控制系统及控制方法。
背景技术:
2.工程机械是中国装备工业的重要组成部分,是土石方施工工程、路面建设与养护、流动式起重装卸作业和各种建筑工程所需的综合性机械化施工工程所必需的机械装备。
3.工程机械车的离合器结合过程,可分为充油段,扭矩相段,速度相段和快速升压段四个阶段,充油阶段是快速充油和绢流调整的阶段,扭矩相阶段是离合器主动片和被动片之间压力升高,传动扭矩建立的阶段;速度相阶段是离合器主动片和被动片之间转速差逐渐减少为零的阶段;快速升压区是离合器主动片和被动片之间无相对滑动快速升压,保证安全结合的过程。现有的电控系统都是直接将手柄信号转变成挡位信号,没有可选的一挡或二档起车,连续换挡不跳挡的功能,此时容易造成车辆冲击问题。
4.电控系统一般都有cutoff(刹车动力中断)功能默认开启1,2挡刹车回空挡3.4不回空挡,但无法取消,用户坡道起车与刹车动力中断的存在矛盾,造成坡道启车时溜车问题,而手柄车辆配置已成型,不便做改动;
5.主要是由于cutoff(刹车动力中断)功能默认开启1,2挡刹车回空挡3.4不回空挡,起步时,踩着刹车,由于cutoff生效,变速箱执行空档操作,只有等松开刹车,才能执行正常挡位接合操作,由于接合需要时间,造成坡道启车时溜车。
6.现有的轮式工程机械和叉车一般都采用单独的缓速踏板与缓速阀阀杆相连,从而降低变速箱离合器摩擦片接合压力,从而实现滑动摩擦,实现降低车速和缓慢起步的功能,但是缺点是操纵踏板太多,有缓速踏板,制动踏板和加速踏板。
技术实现要素:
7.为解决上述问题,克服现有技术的不足,本发明提供了一种轮式工程机械缓速控制系统及控制方法,
8.解决的第一个技术问题是:现有的轮式工程机械和叉车一般都采用单独的缓速踏板与缓速阀阀杆相连,从而降低变速箱离合器摩擦片接合压力,从而实现滑动摩擦,实现降低车速和缓慢起步的功能,操纵踏板太多,有缓速踏板,制动踏板和加速踏板,操作不方便。
9.解决的第二个技术问题是:电控系统一般都有cutoff(刹车动力中断)功能默认开启1,2挡刹车回空挡3.4不回空挡,但无法取消,用户坡道起车与刹车动力中断的存在矛盾,造成坡道启车时溜车问题,而手柄车辆配置已成型,不便做改动。
10.解决的第三个技术问题是:现有的电控系统都是直接将手柄信号转变成挡位信号,没有可选的一挡或二档起车,连续换挡不跳挡的功能,容易造成车辆冲击问题。
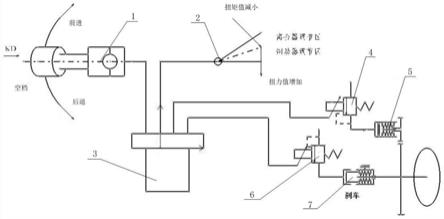
11.本发明解决上述技术问题的具体技术方案为:轮式工程机械缓速控制系统,包括档位手柄、脚踏板和plc控制器,
12.所述脚踏板为整合缓速踏板功能和制动踏板功能的电压反馈制动踏板,所述电压反馈制动踏板的一侧设置有扭力传感器,所述扭力传感器与plc控制器的信号输入端电连接,
13.所述档位手柄设置有kd键,档位手柄与plc控制器的信号输入端电连接,
14.所述plc控制器的一输出端通过电连接与电磁比例减压阀相连,电磁比例减压阀与变速箱离合器相连;
15.plc控制器的另一输出端通过电连接与电磁比例溢流阀相连,电磁比例溢流阀与刹车结构相连。
16.所述的plc控制器的型号为ycb6-8。
17.一种轮式工程机械缓速控制系统的使用方法,利用所述的轮式工程机械缓速控制系统,包括“缓速踏板”状态或“制动踏板”状态判定方法:
18.由所述plc控制器检测电压反馈制动踏板的扭力传感器的扭矩值;根据所述扭矩值确定释放状态或“缓速踏板”状态或“制动踏板”状态的一种。
19.由扭力传感器对电压反馈制动踏板的“缓速踏板”状态进行探测,从电压反馈制动踏板完全释放位置,以扭矩值的第一预定数值设定所述“缓速踏板”状态,所述“缓速踏板”状态为通过电流作用电磁比例减压阀按比例限定变速箱离合器并结合电磁比例溢流阀的压力通过滑磨限速;
20.从扭矩值的第一预定数值,到扭矩值的第二预定数值设定“制动踏板”状态,所述“制动踏板”状态为通过电流作用电磁比例溢流阀的压力进行刹车降速。
21.一种轮式工程机械缓速控制系统的使用方法,利用所述的轮式工程机械缓速控制系统,包括防起步冲击方法;
22.防起步冲击方法由plc控制器检测档位手柄是否从空档转前进或后退档位,来确定执行“延时防冲击离合器结合控制曲线”状态或执行“离合器结合控制曲线”状态。
23.所述离合器结合控制曲线和延时防冲击离合器结合控制曲线均包括充油段、扭矩相段、速度相段和快速升压段。
24.延时防冲击离合器结合控制曲线的扭矩相段与离合器结合控制曲线的扭矩相段的时间比值为1.5-2.5。
25.延时防冲击离合器结合控制曲线的扭矩相段与离合器结合控制曲线的速度相段的时间比值为1.5-2.5。
26.一种轮式工程机械缓速控制系统的使用方法,利用所述的轮式工程机械缓速控制系统,包括防起步溜车方法,具体为:
[0027]ⅰ:当所述plc控制器检测档位手柄在空档时按下kd键,取反打开/关闭cutoff功能标记,
[0028]
当所述plc控制器没有检测到档位手柄在空档时按下kd键,plc控制器进一步地检测是否档位手柄在空档时踩下电压反馈制动踏板;
[0029]ⅱ:当plc控制器检测档位手柄在空档时踩下电压反馈制动踏板,标记临时取消cutoff功能;
[0030]
当plc控制器没有检测档位手柄在空档时踩下电压反馈制动踏板,plc控制器进一步的检测是否松开电压反馈制动踏板;
[0031]ⅲ:当plc控制器检测松开电压反馈制动踏板,去除标记临时取消cutoff功能;
[0032]
当plc控制器没有检测松开电压反馈制动踏板,plc控制器进一步地检测检测档位手柄是否在空档转入前进或后退档;
[0033]ⅳ:plc控制器检测档位手柄在空档转入前进或后退档,标记一档起步缓冲,
[0034]
plc控制器没有检测档位手柄在空档转入前进或后退档,plc控制器进一步地检测档位手柄是否降档至一档,
[0035]
ⅴ
:plc控制器检测档位手柄降档至一档,取消一档起步缓冲的标记,
[0036]
plc控制器没有检测档位手柄降档至一档,plc控制器进一步地检测cutoff功能是否被取消,
[0037]ⅵ:plc控制器检测cutoff功能被取消,变速箱离合器结合,
[0038]
plc控制器没有检测cutoff功能被取消,变速箱离合器断开。
[0039]
本发明的有益效果是:
[0040]
整合缓速踏板功能和制动踏板功能的电压反馈制动踏板,根据扭矩值确定释放状态或“缓速踏板”状态或“制动踏板”状态的一种,实现了简化缓速踏板的目的,简化操作效果,方便操作;
[0041]
该法由plc控制器检测档位手柄是否从空档转前进或后退档位,来确定执行“延时防冲击离合器结合控制曲线”状态或“执行正常离合器结合程序”状态,从而延长升压时间,减少起步冲击的产生;
[0042]
该法创造性地在没有增设硬件的前提下,设置plc控制器识别操作手柄是否空档踩刹车,主动临时取消cutoff功能,进而提前将档位离合器进行结合,避免溜车的产生。
附图说明:
[0043]
附图1是本发明结构示意图;
[0044]
附图2是本发明防起步冲击方法流程图;
[0045]
附图3是本发明“缓速踏板”状态或“制动踏板”状态判定方法流程图;
[0046]
附图4是本发明防起步溜车方法流程图,
[0047]
附图5是本发明离合器结合控制曲线和延时防冲击离合器结合控制曲线对比图,附图中:
[0048]
1.档位手柄;2.电压反馈制动踏板;3.plc控制器;4.电磁比例减压阀;5.变速箱离合器;6.电磁比例溢流阀;7.刹车结构。
具体实施方式:
[0049]
在本发明的描述中具体细节仅仅是为了能够充分理解本发明的实施例,但是作为本领域的技术人员应该知道本发明的实施并不限于这些细节。另外,公知的结构和功能没有被详细的描述或者展示,以避免模糊了本发明实施例的要点。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0050]
本发明的具体实施方式:
[0051]
轮式工程机械缓速控制系统,包括档位手柄1、脚踏板和plc控制器3,其特征在于:
[0052]
所述脚踏板为整合缓速踏板功能和制动踏板功能的电压反馈制动踏板2,所述电
压反馈制动踏板2的一侧设置有扭力传感器,所述扭力传感器与plc控制器3的信号输入端电连接,
[0053]
所述档位手柄1设置有kd键,档位手柄1与plc控制器3的信号输入端电连接,
[0054]
所述plc控制器3的一输出端通过电连接与电磁比例减压阀4相连,电磁比例减压阀4与变速箱离合器5相连;
[0055]
plc控制器3的另一输出端通过电连接与电磁比例溢流阀6相连,电磁比例溢流阀6与刹车结构7相连。
[0056]
进一步的,所述的plc控制器3的型号为ycb6-8。
[0057]
一种轮式工程机械缓速控制系统的使用方法,利用所述的轮式工程机械缓速控制系统,包括“缓速踏板”状态或“制动踏板”状态判定方法:
[0058]
由所述plc控制器3检测电压反馈制动踏板2的扭力传感器的扭矩值;根据所述扭矩值确定释放状态或“缓速踏板”状态或“制动踏板”状态的一种。
[0059]
由扭力传感器对电压反馈制动踏板2的“缓速踏板”状态进行探测,从电压反馈制动踏板2完全释放位置,以扭矩值的第一预定数值设定所述“缓速踏板”状态,所述“缓速踏板”状态为通过电流作用电磁比例减压阀4按比例限定变速箱离合器5并结合电磁比例溢流阀6的压力通过滑磨限速;
[0060]
从扭矩值的第一预定数值,到扭矩值的第二预定数值设定“制动踏板”状态,所述“制动踏板”状态为通过电流作用电磁比例溢流阀6的压力进行刹车降速。
[0061]
该法利用了整合缓速踏板功能和制动踏板功能的电压反馈制动踏板,根据扭矩值确定释放状态或“缓速踏板”状态或“制动踏板”状态的一种,实现了简化缓速踏板的目的,简化操作效果,方便操作。
[0062]
一种轮式工程机械缓速控制系统的使用方法,利用所述的轮式工程机械缓速控制系统,包括防起步冲击方法;
[0063]
防起步冲击方法由plc控制器3检测档位手柄1是否从空档转前进或后退档位,来确定执行“延时防冲击离合器结合控制曲线”状态或执行“离合器结合控制曲线”状态。
[0064]
所述离合器结合控制曲线和延时防冲击离合器结合控制曲线均包括充油段、扭矩相段、速度相段和快速升压段。
[0065]
延时防冲击离合器结合控制曲线的扭矩相段与离合器结合控制曲线的扭矩相段的时间比值为1.5-2.5。
[0066]
延时防冲击离合器结合控制曲线的扭矩相段与离合器结合控制曲线的速度相段的时间比值为1.5-2.5。
[0067]
该法由plc控制器检测档位手柄是否从空档转前进或后退档位,来确定执行“延时防冲击离合器结合控制曲线”状态或“执行正常离合器结合程序”状态,正常离合合器曲线工程机械用变速箱通常结合总时间为0.8~1.2s,延时缓冲曲线保持充油阶段和快速升压段不变,将扭矩相阶段和速度相阶电流即压强过程时间适当延长1.5到2.5倍,让主动片和被动片缓慢同步,减少冲击,从而延长升压时间,减少起步冲击的产生。
[0068]
一种轮式工程机械缓速控制系统的使用方法,利用所述的轮式工程机械缓速控制系统,包括防起步溜车方法,具体为:
[0069]ⅰ:当所述plc控制器3检测档位手柄1在空档时按下kd键,取反打开/关闭cutoff功
能标记,
[0070]
当所述plc控制器3没有检测到档位手柄1在空档时按下kd键,plc控制器3进一步地检测是否档位手柄在空档时踩下电压反馈制动踏板;
[0071]ⅱ:当plc控制器3检测档位手柄在空档时踩下电压反馈制动踏板,标记临时取消cutoff功能;
[0072]
当plc控制器3没有检测档位手柄在空档时踩下电压反馈制动踏板,plc控制器3进一步的检测是否松开电压反馈制动踏板;
[0073]ⅲ:当plc控制器3检测松开电压反馈制动踏板,去除标记临时取消cutoff功能;
[0074]
当plc控制器3没有检测松开电压反馈制动踏板,plc控制器3进一步地检测检测档位手柄是否在空档转入前进或后退档;
[0075]ⅳ:plc控制器3检测档位手柄在空档转入前进或后退档,标记一档起步缓冲,
[0076]
plc控制器3没有检测档位手柄在空档转入前进或后退档,plc控制器3进一步地检测档位手柄是否降档至一档,
[0077]
ⅴ
:plc控制器3检测档位手柄降档至一档,取消一档起步缓冲的标记,
[0078]
plc控制器3没有检测档位手柄降档至一档,plc控制器3进一步地检测cutoff功能是否被取消,
[0079]ⅵ:plc控制器3检测cutoff功能被取消,变速箱离合器5结合,
[0080]
plc控制器3没有检测cutoff功能被取消,变速箱离合器5断开,
[0081]
该法创造性地在没有增设硬件的前提下,设置plc控制器识别操作手柄是否空档踩刹车,主动临时取消cutoff功能,进而提前将档位离合器进行结合,避免溜车的产生。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。