1.本实用新型涉及电动调节阀技术领域,尤其涉及一种智能控制高压差电动调节阀。
背景技术:
2.超高压水射流技术是一种高效、多功能的实用技术,目前在煤矿井瓦斯抽采领域、超高压清洗等领域具有广泛应用,它是将低压水通过超高压柱塞水泵加压后形成超高压水,通过高压管路输送到需要的位置工作点。
3.电动调节阀通常设置于超高压柱塞泵出口旁通管路,通过调节阀门开度调控排放水量,保证系统工作点的介质压力处于合适的范围之内,部分工况条件下需要调节阀完全关闭保压。
4.为了保证电动调节阀阀的密封性,会在其内部设置多个密封垫,但高压的适应环境,会使得电动调节阀内部的密封垫的使用寿命有限,从而一定时间便需要更换,但现有的电动调节阀的上壳和下壳之间通过多个螺栓进行固定,使得拆卸时,需要对多个螺栓进行全部拆除,增加了维修工作的工作量,使得对电动调节阀的外壳拆卸比较麻烦。
5.因此,有必要提供一种智能控制高压差电动调节阀解决上述技术问题。
技术实现要素:
6.本实用新型提供一种智能控制高压差电动调节阀,解决了对电动调节阀的外壳拆卸比较麻烦的问题。
7.为解决上述技术问题,本实用新型提供的智能控制高压差电动调节阀,包括:电动调节阀主体;安装组件,所述安装组件设置与所述电动调节阀主体上,所述安装组件包括转动件,所述转动件上固定连接有转动块,所述转动块的内部开设有转动槽,所述转动槽的内部转动连接有转动杆,所述转动杆上固定安装有凸轮,所述转动块上固定安装有安装板,所述安装板上滑动连接有定位杆,所述定位杆的表面套接有拉动簧,所述转动杆的一端固定安装有转动盘,所述转动盘上开设有定位槽,所述电动调节阀主体上固定安装有传动板。
8.优选的,所述转动件固定安装在所述电动调节阀主体上,所述转动槽位于所述转动块的中部。
9.优选的,所述转动杆的一端贯穿所述转动块的左侧且延伸至所述转动块的右侧,并且延伸至所述转动块右侧的一端与所述转动盘固定连接。
10.优选的,所述安装板位于所述转动杆的上方,所述拉动簧的两端分别与定位杆的一端和所述安装板固定连接。
11.优选的,所述定位杆的一端为弧形端,并且定位杆与所述定位槽相适配,所述定位槽共设置有多个,多个所述定位槽均匀分布在所述转动盘上。
12.优选的,所述传动板位于所述转动件的上方,并且传动板与所述转动槽的内表面滑动连接。
13.优选的,所述凸轮与所述传动板滑动连接,所述转动件共设置有多个,多个所述转动件均匀分布在所述电动调节阀主体上,并且多个转动件上的结构相同。
14.优选的,所述转动杆的一端固定安装有传动筒,所述传动筒的内部滑动连接有推动杆。
15.与相关技术相比较,本实用新型提供的智能控制高压差电动调节阀具有如下有益效果:
16.本实用新型提供一种智能控制高压差电动调节阀,通过旋转转动块,使得转动块带动凸轮旋转,从而将凸轮旋转至传动板的上方,然后旋转转动杆,使得转动杆带动凸轮旋转,从而由凸轮挤压传动板,使得电动调节阀主体的上壳和下壳紧密接触,从而达到对电动调节阀主体两个外壳的连接,避免了通过多个螺栓进行固定时,对电动调节阀主体外壳的拆卸比较麻烦,同时避免了拆卸后,螺栓容易丢失的问题。
附图说明
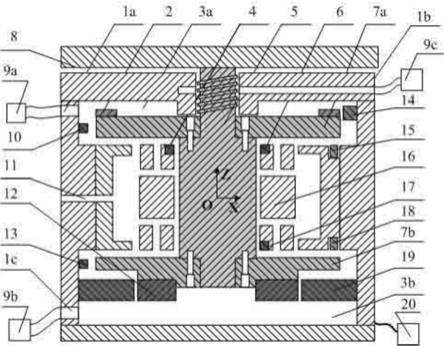
17.图1为本实用新型提供的智能控制高压差电动调节阀的第一实施例的结构示意图;
18.图2为图1所示的a部放大示意图;
19.图3为图1所示的转动件的立体图;
20.图4为本实用新型提供的智能控制高压差电动调节阀的第二实施例的结构示意图。
21.图中标号:1、电动调节阀主体,2、安装组件,21、转动件,22、转动块,23、转动槽,24、转动杆,25、凸轮,26、安装板,27、定位杆,28、拉动簧,29、转动盘,210、定位槽,211、传动板,3、传动筒,4、推动杆。
具体实施方式
22.下面结合附图和实施方式对本实用新型作进一步说明。
23.第一实施例
24.请结合参阅图1、图2、图3,其中,图1为本实用新型提供的智能控制高压差电动调节阀的第一实施例的结构示意图;图2为图1所示的a部放大示意图;图3为图1所示的转动件的立体图。一种智能控制高压差电动调节阀包括:电动调节阀主体1;安装组件2,所述安装组件2设置与所述电动调节阀主体1上,所述安装组件2包括转动件21,所述转动件21上固定连接有转动块22,所述转动块22的内部开设有转动槽23,所述转动槽23的内部转动连接有转动杆24,所述转动杆上固定安装有凸轮25,所述转动块22上固定安装有安装板26,所述安装板26上滑动连接有定位杆27,所述定位杆27的表面套接有拉动簧28,所述转动杆24的一端固定安装有转动盘29,所述转动盘29上开设有定位槽210,所述电动调节阀主体1上固定安装有传动板211。
25.所述转动件21固定安装在所述电动调节阀主体1上,所述转动槽23位于所述转动块22的中部。
26.转动槽23可以使得转动块22旋转时不受传动板211的限制。
27.所述转动杆24的一端贯穿所述转动块22的左侧且延伸至所述转动块22的右侧,并
且延伸至所述转动块22右侧的一端与所述转动盘29固定连接。
28.所述安装板26位于所述转动杆24的上方,所述拉动簧28的两端分别与定位杆27的一端和所述安装板26固定连接。
29.拉动簧28是对定位杆27向下拉动。
30.所述定位杆27的一端为弧形端,并且定位杆27与所述定位槽210相适配,所述定位槽210共设置有多个,多个所述定位槽210均匀分布在所述转动盘29上。
31.弧形端的定位杆27,使得定位杆27只能对一个方形旋转的定位槽210进行限位,而定位槽210反向旋转时,会使得定位槽210挤压弧形端,使得定位杆27向上收缩。
32.所述传动板211位于所述转动件21的上方,并且传动板211与所述转动槽23的内表面滑动连接。
33.传动板211和转动件21分别固定在电动调节阀主体1的上壳和下壳上。
34.所述凸轮25与所述传动板211滑动连接,所述转动件21共设置有多个,多个所述转动件21均匀分布在所述电动调节阀主体1上,并且多个转动件21上的结构相同。
35.转动件21的个数可以根据需要进行设置,优选为三个。
36.本实用新型提供的智能控制高压差电动调节阀的工作原理如下:
37.当需要对电动调节阀主体1的外壳进行连接时,旋转转动块22,转动块22旋转会带动转动槽23和转动杆24旋转,转动杆24旋转会带动凸轮25旋转,从而将凸轮25旋转至传动板211的上方,然后旋转转动杆24,转动杆24旋转会使得凸轮25旋转,凸轮25旋转会使得凸轮25向下挤压传动板211,使得传动板211连接的电动调节阀主体1的上壳与转动件21连接的下壳相互靠近,从而使得上壳和下壳紧密连接,并且转动杆24旋转会带动转动盘29同步旋转,转动盘29旋转会带动定位槽210旋转,定位槽210旋转会使得定位槽210挤压定位杆27,使得定位杆27向上移动,而转动盘29旋转完成后,由拉动簧28拉动定位杆27向下移动,使得定位杆27与定位槽210卡接,从而可以对转动后的转动盘29进行定位。
38.与相关技术相比较,本实用新型提供的智能控制高压差电动调节阀具有如下有益效果:
39.通过旋转转动块22,使得转动块22带动凸轮25旋转,从而将凸轮25旋转至传动板211的上方,然后旋转转动杆24,使得转动杆24带动凸轮25旋转,从而由凸轮25挤压传动板211,使得电动调节阀主体1的上壳和下壳紧密接触,从而达到对电动调节阀主体1两个外壳的连接,避免了通过多个螺栓进行固定时,对电动调节阀主体1外壳的拆卸比较麻烦,同时避免了拆卸后,螺栓容易丢失的问题。
40.第二实施例
41.请参阅图4,基于本技术的第一实施例提供的一种智能控制高压差电动调节阀,本技术的第二实施例提出另一种智能控制高压差电动调节阀。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
42.具体的,本技术的第二实施例提供的智能控制高压差电动调节阀的不同之处在于,智能控制高压差电动调节阀,所述转动杆24的一端固定安装有传动筒3,所述传动筒3的内部滑动连接有推动杆4。
43.对推动杆4一端的推动和通过扳手对螺母的拆卸的原理相同,利用了省力杠杆。
44.工作原理:
45.当需要对转动杆24进行转动时,推动推动杆4的一端,推动杆4的一端旋转会带动传动筒3旋转,传动筒3旋转会带动转动杆24旋转,使得对转动杆24的旋转利用省力杠杆,从而使得对转动杆24的转动更加省力。
46.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。