1.本发明涉及压电驱动装置以及机器人。
背景技术:
2.近年来,开发有利用压电元件的振动的压电电机。作为这样的压电电机,例如在专利文献1中公开了一种超声波电机,其具有具备多个压电元件的超声波振子。超声波振子作为压电驱动装置发挥功能,通过向压电元件输入电信号,从而利用压电元件的振动使超声波振子振动,该振动传递到与转子接触的接触部,由此能够使转子旋转。
3.专利文献1:日本专利特开2009-254198号公报
4.但是,在专利文献1所记载的压电驱动装置即超声波振子中,存在为了得到高的重量功率比使压电元件小型化时向多个压电元件输入电信号的布线变细,布线电阻增大这样的技术问题。因此,驱动效率降低,不能得到高的重量功率比。
技术实现要素:
5.压电驱动装置具备:基板;多个压电元件,配置在所述基板上;第一槽部,设置于所述多个压电元件之间;以及第一布线,设置于所述第一槽部的侧面的至少一部分和底部。
6.机器人具备压电电机,所述压电电机具有上述记载的压电驱动装置。
附图说明
7.图1是示出具备第一实施方式所涉及的压电驱动装置的压电电机的简要构成的俯视图。
8.图2是示出第一实施方式所涉及的压电驱动装置的简要构成的俯视图。
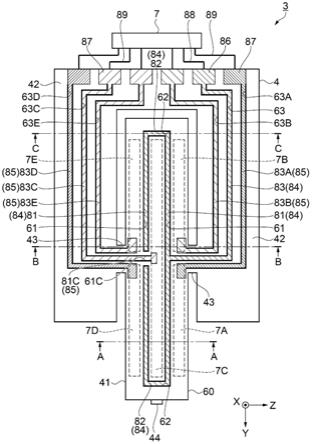
9.图3是图2中的a-a线剖视图。
10.图4是图2中的b-b线剖视图。
11.图5是图2中的c-c线剖视图。
12.图6是示出压电驱动装置的制造方法的流程图。
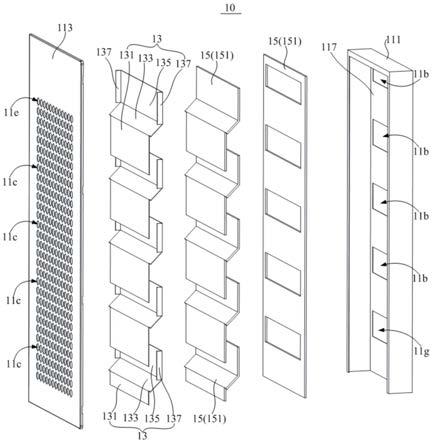
13.图7是示出第二实施方式所涉及的压电驱动装置的简要构成的俯视图。
14.图8是图7中的d-d线剖视图。
15.图9是示出第三实施方式所涉及的压电驱动装置的简要构成的俯视图。
16.图10是图9中的e-e线剖视图。
17.图11是示出具备第四实施方式所涉及的压电驱动装置的机器人的简要构成的立体图。
18.附图标记说明
[0019]1…
压电电机,2
…
转子,3、3a、3b
…
压电驱动装置,4
…
压电致动器,5
…
施力部件,7a、7b、7c、7d、7e
…
压电元件,7
…
控制装置,9
…
编码器,21
…
外周面,41
…
振动体,42
…
支承部,43
…
连接部,44
…
凸部,51
…
基部,60
…
基板,61、61c
…
第一槽部,62
…
第二槽部,63、
63a、63b、63c、63d、63e
…
第三槽部,65
…
侧面,66
…
底部,71
…
第一电极,72
…
压电体,73
…
第二电极,74
…
绝缘层,81、81c
…
第一布线,82
…
第二布线,83、83a、83b、83c、83d、83e
…
第三布线,84
…
公共电极用布线,85
…
驱动电极用布线,86
…
公共电极用端子,87
…
驱动电极用端子,88、89
…
外部布线,91
…
标尺,92
…
光学元件,513
…
弹簧部,921
…
发光元件,922
…
拍摄元件,1000
…
机器人,b1
…
箭头,b2
…
箭头,o
…
中心轴。
具体实施方式
[0020]
1.第一实施方式
[0021]
首先,关于第一实施方式所涉及的压电驱动装置3,列举具备压电驱动装置3的压电电机1作为一例,参照图1~图5进行说明。
[0022]
需要注意的是,为了方便说明,在以下的除了图6以及图11以外的各图中,作为相互正交的三个轴,图示出x轴、y轴以及z轴。另外,将沿x轴的方向称为“x方向”,将沿y轴的方向称为“y方向”,将沿z轴的方向称为“z方向”。另外,将各轴的箭头侧也称为“正侧”,将与箭头相反一侧也称为“负侧”,将x方向的正侧也称为“上”,将x方向的负侧也称为“下”。
[0023]
如图1所示,压电电机1具有:作为被驱动部件的转子2,转子2呈圆盘状,且能够绕其中心轴o旋转;以及压电驱动装置3,与转子2的外周面21抵接。在这样的压电电机1中,使压电驱动装置3进行弯曲振动时,转子2绕与x轴平行的中心轴o旋转。
[0024]
另外,在转子2设置有编码器9,通过编码器9,能够检测转子2的举动,尤其是旋转量以及角速度。编码器9具有:固定于转子2的上表面的标尺91;以及设置于标尺91的上侧的光学元件92。另外,标尺91呈圆板状,在其上表面设置有未图示的图案。另一方面,光学元件92具有朝向标尺91的图案照射光的发光元件921和拍摄标尺91的图案的拍摄元件922。在这样的构成的编码器9中,通过对由拍摄元件922获取的图案的图像进行模板匹配,能够检测转子2的旋转量、驱动速度、绝对位置等。
[0025]
本实施方式的压电驱动装置3具有:进行振动的压电致动器4;朝向转子2对压电致动器4施力的施力部件5;以及控制压电致动器4的驱动的控制装置7。
[0026]
压电致动器4具有振动体41、支承振动体41的支承部42、将振动体41和支承部42连接的连接部43以及与振动体41连接且将振动体41的振动传递到转子2的凸部44。
[0027]
如图2所示,振动体41呈以x方向作为厚度方向且在包括y轴以及z轴的y-z平面中扩展的板状,通过一边在y方向上伸缩的同时一边向z方向弯曲而以s字状进行弯曲振动。另外,振动体41在从x方向的俯视观察下是以作为伸缩方向的y方向为长边的长条形状。
[0028]
另外,振动体41具有基板60和配置在基板60上的用于使振动体41进行弯曲振动的驱动用的五个压电元件7a~7e。
[0029]
压电元件7c在基板60的z方向的中央部沿作为基板60的长边方向的y方向配置。另外,相对于压电元件7c在基板60的z方向的正侧,压电元件7a、7b沿基板60的长边方向排列配置,在z方向的负侧,压电元件7d、7e沿基板60的长边方向排列配置。
[0030]
如图3所示,压电元件7a~7e分别具备:配置在基板60上的第一电极71、配置在第一电极71上的压电体72以及配置在压电体72上的第二电极73。需要注意的是,在第二电极73上设置有用于防止电极间的短路的绝缘层74。第一电极71、压电体72以及第二电极73分别独立地设置于各压电元件7a~7e。第二电极73是基于电信号使驱动用的压电元件7a~7e
的各压电体72振动的驱动用电极。另外,压电元件7a~7e各自的第一电极71是通过设于后述的第一槽部61的第一布线81而被电连接的公共电极。
[0031]
压电元件7c随着通电而进行在作为振动体41的长边方向的y方向上伸缩的纵向振动。另外,压电元件7a、7e上的第二电极73相互电连接,压电元件7b、7d上的第二电极73相互电连接,进行使振动体41向z方向弯曲的弯曲振动。因此,对压电元件7c、压电元件7a、7e和压电元件7b、7d分别施加相位不同的同频率的交变电压作为电信号,由于它们的伸缩定时错开,因此能够使振动体41在其面内以s字状进行弯曲振动。也就是说,本实施方式的压电驱动装置3是振动体41通过压电元件7a~7e的振动而在y-z平面内位移、振动的面内振动方式。
[0032]
在基板60的配置有压电元件7a~7e的面设置有第一槽部61、61c和第二槽部62。需要注意的是,基板60由在槽形成等时加工精度优异的硅构成。
[0033]
第一槽部61沿作为基板60的长边方向的y方向延伸,在从x方向的俯视观察下,配置于压电元件7a与压电元件7c之间、压电元件7b与压电元件7c之间、压电元件7c与压电元件7d之间以及压电元件7c与压电元件7e之间。需要注意的是,压电元件7a与压电元件7c之间的第一槽部61和压电元件7b与压电元件7c之间的第一槽部61各自的y方向的端部彼此连结。另外,如图3所示,在第一槽部61的侧面65的至少一部分和底部66设置有第一布线81。
[0034]
在此,将压电元件间隔设为60μm时,元件间的布线宽度最大也就是50μm。因此,通过在元件间设置宽度50μm且槽深度25μm的第一槽部61,并在第一槽部61的侧面65和底部66设置第一布线81,能够使实质上的布线宽度为100μm,能够使布线电阻减半。
[0035]
第一槽部61c配置于两个压电元件7d、7e之间,沿与第一槽部61延伸的方向正交的z方向延伸。另外,在第一槽部61c的侧面65的至少一部分和底部66设置有第一布线81c。
[0036]
第二槽部62分别配置在压电元件7c的长边方向的两端侧、也就是压电元件7c的y方向的正侧和负侧,并与配置于压电元件7a、7b与压电元件7c之间的第一槽部61和配置于压电元件7c与压电元件7d、7e之间的第一槽部61连结。具体而言,配置于压电元件7c的y方向的正侧的第二槽部62与配置于压电元件7a与压电元件7c之间的第一槽部61和配置于压电元件7c与压电元件7d之间的第一槽部61连结,配置于压电元件7c的y方向的负侧的第二槽部62与配置于压电元件7b与压电元件7c之间的第一槽部61和配置于压电元件7c与压电元件7e之间的第一槽部61连结。另外,如图5所示,在第二槽部62的侧面65的至少一部分和底部66设置有第二布线82,将设于第一槽部61的第一布线81彼此连接。具体而言,第二布线82将在配置于压电元件7a、7b与压电元件7c之间的第一槽部61中设置的第一布线81和在配置于压电元件7c与压电元件7d、7e之间的第一槽部61中设置的第一布线81电连接。
[0037]
支承部42经由连接部43支承作为振动体41的基板60。支承部42在从x方向的俯视观察下为包围振动体41的y方向的负侧的u字形状。另外,连接部43将作为振动体41的弯曲振动的波节的部分、具体而言是振动体41的y方向的中央部与支承部42连接。
[0038]
另外,在支承部42上设置有六个第三槽部63、63a、63b、63c、63d、63e、公共电极用端子86和五个驱动电极用端子87。需要注意的是,六个第三槽部63、63a、63b、63c、63d、63e还分别设置于连接部43。另外,公共电极用端子86以及五个驱动电极用端子87在支承部42的y方向的负侧的端部沿z方向排列配置。
[0039]
在设置于支承部42以及连接部43的第三槽部63、63a、63b、63c、63d、63e各自的侧
面65的至少一部分和底部66分别设置有第三布线83、83a、83b、83c、83d、83e。
[0040]
第三布线83的一端部与公共电极用端子86电连接,第三布线83的另一端部与在配置于压电元件7a、7b与压电元件7c之间的第一槽部61中设置的第一布线81电连接。
[0041]
第三布线83b的一端部与驱动电极用端子87电连接,第三布线83b的另一端部与设置于压电元件7b上的第三布线83b电连接。需要注意的是,设置于压电元件7b上的第三布线83b如图4所示,经由设置于压电元件7b的绝缘层74中的贯通孔67内的电极与压电元件7b的第二电极73电连接。因此,压电元件7b的第二电极73经由第三布线83b与驱动电极用端子87电连接。
[0042]
三个第三布线83a、83d、83e也与第三布线83b同样地,一端部与驱动电极用端子87电连接,另一端部分别与压电元件7a、7d、7e的第二电极73电连接。
[0043]
第三布线83c的一端部与驱动电极用端子87电连接,第三布线83c的另一端部经由设置于第一槽部61c的第一布线81c与设置于压电元件7c上的第一布线81c电连接。需要注意的是,设置于压电元件7c上的第一布线81c与第三布线83b同样地,经由设置于压电元件7c的绝缘层74中的贯通孔67内的电极与压电元件7c的第二电极73电连接。
[0044]
与压电元件7a~7e的第一电极71电连接的第一布线81、第二布线82以及第三布线83是公共电极用布线84,接地至gnd。另外,从公共电极用端子86经由外部布线88与控制装置7电连接。
[0045]
与压电元件7a~7e的第二电极73电连接的第一布线81c以及第三布线83a、83b、83c、83d、83e是驱动电极用布线85,从驱动电极用端子87经由外部布线89与控制装置7电连接。
[0046]
凸部44设置于振动体41的前端部,从振动体41向y方向的正侧突出。于是,凸部44的前端部与转子2的外周面21接触。因此,振动体41的振动经由凸部44传递到转子2。通过分别调整施加到压电元件7a~7e的交变电压,使伸缩定时错开,如图1所示,能够使转子2如箭头b1所示那样顺时针旋转,或使转子2如箭头b2所示那样逆时针旋转。
[0047]
施力部件5是朝向转子2的外周面21对凸部44施力的部件。通过在使设置于支承压电致动器4的基部51的弹簧部513在y方向上挠曲的状态下将施力部件5固定于壳体等,从而施力部件5能够利用弹簧部513的复原力而朝向转子2的外周面21对凸部44施力。
[0048]
控制装置7通过对压电元件7a~7e施加相位不同的同频率的交变电压作为电信号而控制压电驱动装置3的驱动。
[0049]
接着,参照图6说明第一实施方式所涉及的压电驱动装置3的制造方法。
[0050]
如图6所示,压电驱动装置3的制造方法包括氧化膜形成工序、第一电极形成工序、压电体形成工序、第二电极形成工序、绝缘层形成工序、槽形成工序、布线形成工序以及外形形成工序。
[0051]
1.1氧化膜形成工序
[0052]
首先,在步骤s1中,准备硅基板,在大气中以高温加热硅基板,从而在硅基板的表面形成作为绝缘层的氧化膜。
[0053]
1.2第一电极形成工序
[0054]
接着,在步骤s2中,使用溅射法或蒸镀法将金(au)、铂(pt)、铱(ir)等金属在硅基板的氧化膜上成膜,形成第一电极71。
[0055]
1.3压电体形成工序
[0056]
接着,在步骤s3中,使用溶胶-凝胶法、溅镀法在第一电极71上形成压电层,之后,以光刻法对压电层和第一电极71形成图案而形成压电元件图案,形成压电体72。需要注意的是,作为压电体72的构成材料,例如能够使用锆钛酸铅(pzt)、钛酸钡、钛酸铅、铌酸钾、铌酸锂、钽酸锂、钨酸钠、氧化锌、钛酸锶钡(bst)、钽酸锶铋(sbt)、偏铌酸铅、钪铌酸铅等压电陶瓷。
[0057]
1.4第二电极形成工序
[0058]
接着,在步骤s4中,与第一电极71同样地,使用溅射法或蒸镀法将金(au)、铂(pt)、铱(ir)等金属在硅基板的氧化膜上成膜,之后,以光刻法形成压电元件图案,形成第二电极73。
[0059]
1.5绝缘层形成工序
[0060]
接着,在步骤s5中,通过cvd(chemical vapor deposition:化学气相沉积)法,在第二电极73上成膜sio2、al2o3等绝缘膜,之后,以光刻法形成压电元件图案,形成绝缘层74。另外,为了实现压电元件7a~7e的第二电极73与第三布线83a、83b、83d、83e或第一布线81c的电连接,通过rie(reactive ion etching:反应离子蚀刻)法在第二电极73形成贯通孔67。
[0061]
1.6槽形成工序
[0062]
接着,在步骤s6中,通过rie法或icp(inductively coupled plasma:电感耦合等离子体)法等干蚀刻,在相当于压电元件7a~7e的周边、支承部42的硅基板上,以达到规定深度的方式进行半蚀刻而形成第一槽部61、第二槽部62以及第三槽部63等。另外,在硅基板的厚度是50μm的情况下,槽的深度优选25μm,在硅基板的厚度是20μm~200μm的情况下,槽的深度优选为硅基板的厚度的一半的10μm~100μm。
[0063]
1.7布线形成工序
[0064]
接着,在步骤s7中,使用溅射法或蒸镀法将金(au)、铜(cu)、铝(al)等金属在硅基板、绝缘层74上成膜,之后,以光刻法形成布线图案,形成第一布线81、第二布线82以及第三布线83等。需要注意的是,在槽的侧面65成膜金属的情况下,优选使用向槽的侧面65的蔓延性良好的等离子体cvd法。另外,在溅射法的情况下,优选使硅基板倾斜配置,边使其旋转边进行成膜。另外,作为布线的厚度,优选2μm,但只要是0.5μm~5μm的范围就没有关系。
[0065]
1.8外形形成工序
[0066]
接着,在步骤s8中,以光刻法形成振动体41、支承部42以及连接部43成为一体的压电致动器外形图案,通过rie法或icp法等干蚀刻,形成压电致动器4的外形。
[0067]
根据以上,能够得到在配置于基板60上的多个压电元件7a~7e之间配置的第一槽部61、配置于压电元件7c的周边的第二槽部62以及配置于支承部42的第三槽部63各自的槽部的侧面65的至少一部分和底部66设置有第一布线81、第二布线82以及第三布线83的压电驱动装置3。
[0068]
根据上述那样的压电驱动装置3,在配置于基板60上的多个压电元件7a~7e之间配置的第一槽部61的侧面65的至少一部分和底部66设置有第一布线81,因此在压电元件7a~7e之间的狭窄区域中,能够增大第一布线81的截面积,能够降低布线电阻。因此,能够得到提高驱动效率且具有高重量功率比的压电驱动装置3。
[0069]
2.第二实施方式
[0070]
接着,参照图7以及图8说明第二实施方式所涉及的压电驱动装置3a。
[0071]
本实施方式的压电驱动装置3a与第一实施方式的压电驱动装置3相比,除了在压电致动器4a没有设置第一槽部61c、第三槽部63、63a、63b、63c、63d、63e以外,与第一实施方式的压电驱动装置3是同样的。需要注意的是,围绕与上述第一实施方式的不同点进行说明,同样的事项则省略其说明。另外,在图7以及图8中,对于与上述的实施方式同样的构成标注同一附图标记。
[0072]
如图7所示,本实施方式的压电驱动装置3a在压电致动器4a的基板60的配置有压电元件7a~7e的面设置有第一槽部61和第二槽部62。
[0073]
第一槽部61沿作为基板60的长边方向的y方向延伸,在从x方向的俯视观察下,配置于压电元件7a与压电元件7c之间、压电元件7b与压电元件7c之间、压电元件7c与压电元件7d之间以及压电元件7c与压电元件7e之间。需要注意的是,压电元件7a与压电元件7c之间的第一槽部61和压电元件7b与压电元件7c之间的第一槽部61各自的y方向的端部彼此连结。另外,如图8所示,在第一槽部61的侧面65的至少一部分和底部66设置有第一布线81。
[0074]
第二槽部62分别配置于压电元件7c的y方向的正侧和负侧,与配置于压电元件7a、7b与压电元件7c之间的第一槽部61和配置于压电元件7c与压电元件7d、7e之间的第一槽部61连结。另外,在第二槽部62的侧面65的至少一部分和底部66设置有第二布线82,将在配置于压电元件7a、7b与压电元件7c之间的第一槽部61中设置的第一布线81与在配置于压电元件7c与压电元件7d、7e之间的第一槽部61中设置的第一布线81电连接。
[0075]
通过采用这样的构成,能够得到与上述第一实施方式同等的效果。另外,与第一实施方式相比,在压电致动器4a没有形成第一槽部61c和第三槽部63、63a、63b、63c、63d、63e,因此槽部中的布线的断线等的发生概率降低,从而能够实现制造成品率的提高。
[0076]
3.第三实施方式
[0077]
接着,参照图9以及图10说明第三实施方式所涉及的压电驱动装置3b。
[0078]
本实施方式的压电驱动装置3b与第一实施方式的压电驱动装置3相比,除了在压电致动器4b没有设置第一槽部61c、第二槽部62和第三槽部63、63a、63b、63c、63d、63e以外,与第一实施方式的压电驱动装置3是同样的。需要注意的是,围绕与上述第一实施方式的不同点进行说明,同样的事项则省略其说明。另外,在图9以及图10中,对于与上述的实施方式同样的构成标注同一附图标记。
[0079]
如图9所示,本实施方式的压电驱动装置3b在压电致动器4b的基板60的配置有压电元件7a~7e的面设置有第一槽部61。
[0080]
第一槽部61沿作为基板60的长边方向的y方向延伸,在从x方向的俯视观察下,配置在压电元件7a与压电元件7c之间、压电元件7b与压电元件7c之间、压电元件7c与压电元件7d之间以及压电元件7c与压电元件7e之间。需要注意的是,压电元件7a与压电元件7c之间的第一槽部61和压电元件7b与压电元件7c之间的第一槽部61各自的y方向的端部彼此连结。另外,如图10所示,在第一槽部61的侧面65的至少一部分和底部66设置有第一布线81。需要注意的是,设置于压电元件7c两侧的第一槽部61的第一布线81分别在y方向的端部通过第二布线82电连接。
[0081]
通过采用这样的构成,能够得到与上述第一实施方式同等的效果。另外,与第一实
施方式相比,在压电致动器4b没有形成第一槽部61c、第二槽部62和第三槽部63、63a、63b、63c、63d、63e,因此槽部中的布线的断线等的发生概率降低,从而能够实现制造成品率的提高。
[0082]
4.第四实施方式
[0083]
接着,参照图11说明第四实施方式所涉及的具备压电驱动装置3、3a、3b的机器人1000。需要注意的是,在以下的说明中,举例示出应用了具备压电驱动装置3的压电电机1的构成来进行说明。
[0084]
如图11所示,机器人1000能够进行精密设备、构成其的零部件的供料、除料、传送以及组装等作业。机器人1000是6轴机器人,具有:固定于地板、天花板的基座1010;与基座1010转动自由地连结的臂1020;与臂1020转动自由地连结的臂1030;与臂1030转动自由地连结的臂1040;与臂1040转动自由地连结的臂1050;与臂1050转动自由地连结的臂1060;与臂1060转动自由地连结的臂1070;以及控制这些臂1020、1030、1040、1050、1060、1070的驱动的控制装置1080。
[0085]
另外,在臂1070设置有手爪连接部,在手爪连接部安装与使机器人1000执行的作业相应的末端执行器1090。另外,在各关节部中的全部或者一部分搭载有压电电机1,通过该压电电机1的驱动而使各臂1020、1030、1040、1050、1060、1070转动。需要注意的是,压电电机1也可以搭载于末端执行器1090,用于末端执行器1090的驱动。
[0086]
控制装置1080由计算机构成,例如具有处理器(cpu)、存储器、i/f(接口)等。于是,处理器通过执行存储于存储器的规定的程序而控制机器人1000的各部的驱动。需要注意的是,上述程序也可以经由i/f从外部的服务器下载。另外,控制装置1080的全部或者部分构成也可以是设于机器人1000的外部并经由lan(局域网)等通信网连接的构成。
[0087]
如上所述,这样的机器人1000具备压电电机1。即,机器人1000具有压电驱动装置3,该压电驱动装置3具备压电致动器4和控制压电致动器4的振动的控制装置7,通过使压电致动器4振动而驱动与压电致动器4抵接的转子2。其中,压电致动器4在配置于基板60上的多个压电元件7a~7e之间设置的第一槽部61的侧面65和底部66设置有第一布线81,因此能够使第一布线81的截面积增加,减少布线电阻。根据这样的机器人1000,在压电驱动装置3中,形成为布线电阻小的布线构造,因此能够实现驱动效率提高并具有高重量功率比的压电驱动装置3。其结果是,可得到高重量功率比的机器人1000。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。